УДК 621.396.96
РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС МОРСКОГО БАЗИРОВАНИЯ ДЛЯ ОЦЕНКИ ЛЕДОВОЙ ОБСТАНОВКИ
Е. П. Смирнов, А. И. Баскаков, Ю. И. Лукашенко
Национальный исследовательский университет «МЭИ»
Статья получена 5 декабря 2013 г.
Аннотация. Рассмотрен радиолокационный метод разведки ледовой обстановки в районах эксплуатации нефтегазовых объектов, основанный на измерении высоты неровностей рельефа ледовой поверхности, дальности, скорости и направлении его движения. Данная информация, благодаря использованию известных эмпирических соотношений высоты рельефа ледового поля над уровнем моря, его толщины и рельефа подводной части, может использоваться для качественной оценки состояния, толщины и потенциальной опасности ледовых полей. Обосновывается выбор основных параметров и приводится описание работы РЛ комплекса, использующего два режима, в первом режиме проводится оценка по интерферометрической разности фаз сигналов, приходящих с разнесенных в пространстве антенн комплекса, топографических высот неровностей поверхности, а во втором режиме оценивается одновременно скорость по величине доплеровского сдвига и дальность. Представлены результаты исследований влияния параметров зондирующего сигнала на качество радиоинтерферометрических измерений, а также результаты имитационного моделирования работы радиоинтерферометрического режима. Материал докладывался на 6-й Всероссийской конференции «Радиолокация и радиосвязь».
Ключевые слова: радиолокатор контроля ледовой обстановки морского базирования, дистанционное зондирование, разностно-фазовая интерферометрия.
Abstract: Surface-based radar system can be used for remote sensing of characteristics of sea arctic ice fields, such as speed and direction of ice motion, distance to an ice floe and thickness of ice. For this purpose, we offered multi-channel coherent interferometric radar system that operates on one wavelength (8 mm). The radar system is design to use pulse (with wide bandwidth) compression techniques, coherent integration, doppler and interferometric processing to obtain high loop sensitivity and high resolution on speed, range and altitude. Radar data are acquired line by line while rotating the transmitting and receiving antennas about a vertical axis. In this article the design, measurement principles, simulation results and characteristics of surface-based radar are presented.
Key words: surface-based radar for sea ice monitoring, remote sensing, phase-difference interferometry.
Введение
В связи с развитием проектов разработки нефтегазовых месторождений на арктическом шельфе России актуальной становится проблема контроля морских ледовых полей непосредственно в районе буровых платформ. Для наблюдения за ледовыми покровами широко применяются радиолокационные станции (РЛС) с синтезированием апертуры антенны (РСА) самолетного и космического базирования [1, 2]. При этом интенсивно развиваются радиолокационные интерферометрические методы построения высотной топографии подстилающей поверхности [3]. Однако, известные аэрокосмические методы не обеспечивают требуемой точности и оперативности поступления важнейшей информации о ледовых полях в районах буровых платформ, а именно, их степени торосистости, толщины, скорости и направлении дрейфа. Без этой информации невозможна безопасная эксплуатация морских арктических месторождений. В связи с этим актуальной задачей является разведка ледовой обстановки в районах эксплуатации нефтегазовых объектов с использованием радиолокационных комплексов морского базирования одновременно с аэрокосмическими системами. Быстро разворачиваемые, гораздо более дешевые и более точные по сравнению с космическими и авиационными системами, радиолокационные комплексы морского базирования представляют эффективное решение задачи непрерывного мониторинга небольших близлежащих пространств.
Следует отметить, что в настоящее время предпочтение при решении задач контроля ледовой обстановки отдается, в основном, аэрокосмическим методам. В то же время информация о методах интерферометрической радиолокационной оценки ледовой обстановки с морских нефтедобывающих буровых платформ или с берега в научно-технической литературе практически не встречается.
2. Постановка задачи
Основным объектом наблюдения при дистанционном зондировании Земли в арктическом регионе является морской лед, айсберги и морская поверхность. При росте и разрушении льда условия на его поверхности и в толщине постоянно изменяются, что предопределяет разнообразие рельефа, форм шероховатости и наличие торосов. Торосы являются характерной особенностью ледовой поверхности в арктическом регионе. Торосы образуются при сжатии битого льда, который выдавливается на поверхность более ровного окружающего ледового покрова и в воду, образуя подводную и надводную части торосов, которые называются килем и парусом. Торосы могут играть роль якорей при внедрении их в морское дно, обеспечивая устойчивость припайных льдов. Припайные льды являются препятствием при движении судов в шельфовой зоне, значительно увеличивая прочность ледового покрова. Для подводных трубопроводов представляют опасность кили торосов, воздействие которых может привести к их пробою. Степень всторошенности ледовых полей окружающих буровые платформы и размеры консолидированного слоя льда внутри торосов определяет ледовые нагрузки на буровые платформы.
В силу вышеизложенных причин задача определения пространственных параметров торошения была определена как основная при проведении оценки ледовой обстановки. В [4] представлены результаты статистического анализа данных о 176 торосах, полученных в результате арктических экспедиций, которые дают информацию о том, что средняя форма торосов может быть представлена двумя равнобедренными треугольниками (см. рис. 1) с углами ската порядка 30°. При этом выполняются следующие соотношения:
|
|
(1) |
где ![]() и
и ![]() - высота паруса и глубина киля
тороса соответственно,
- высота паруса и глубина киля
тороса соответственно, ![]() - ширина тороса. Также существует
зависимость высоты паруса и глубины киля торосов от толщины кусков льда
- ширина тороса. Также существует
зависимость высоты паруса и глубины киля торосов от толщины кусков льда ![]() , из которых сложены торосы:
, из которых сложены торосы:
|
|
(2) |
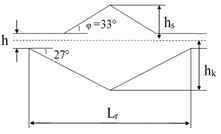
Рис. 1. Осредненная форма вертикального сечения гряды торосов
Исходя из вышеперечисленного, можно сделать вывод, что одной из важнейших научных задач на современном этапе развития радиолокационных методов оценки ледовой обстановки, является непрерывное, в любых метеоусловиях с высокой точностью (≥ 5 см) формирование цифровой модели рельефа (ЦМР) ледового поля, оценка дальности (с разрешением в 1 м), скорости (с разрешением в 0,2 м/с) и направления его движения. Данная информация, благодаря использованию известных эмпирических соотношений высоты рельефа ледового поля над уровнем моря, его толщины и рельефа подводной части, может использоваться для качественной оценки состояния, толщины и потенциальной опасности ледовых полей.
3. Геометрия задачи
Для увеличения зоны
прямой видимости РЛ комплекс предлагается устанавливать настолько высоко,
насколько это возможно, однако максимальная высота на буровых платформах
составляет 32 м, что соответствует дальности прямой видимости в 22 км.
Геометрия визирования представлена на рис. 2, где ![]() - разность хода лучей,
- разность хода лучей, ![]() – размер базы,
– размер базы, ![]() – угол места,
– угол места, ![]() – угол наклона базы,
– угол наклона базы, ![]() - высота рельефа местности,
- высота рельефа местности, ![]() – высота ведущей интерферометрической
антенны и
– высота ведущей интерферометрической
антенны и ![]() – наклонная дальность. В связи с
высокой стоимостью и сложностью систем с электронным сканированием луча
диаграммы направленности антенны (ДНА), предложено сканировать пространство по
азимуту механически, а по углу места вся исследуемая поверхность зондируется
одним лучом.
– наклонная дальность. В связи с
высокой стоимостью и сложностью систем с электронным сканированием луча
диаграммы направленности антенны (ДНА), предложено сканировать пространство по
азимуту механически, а по углу места вся исследуемая поверхность зондируется
одним лучом.
Рельеф местности
определяется по разности хода лучей ![]() согласно следующему выражению
согласно следующему выражению
|
(3) |
Разность
хода лучей ![]() можно измерить
по интерферометрической разности фаз (ИРФ) эхо-сигналов, приходящих с
разнесенных в пространстве на величину
можно измерить
по интерферометрической разности фаз (ИРФ) эхо-сигналов, приходящих с
разнесенных в пространстве на величину ![]() антенн
антенн ![]() и
и ![]() . Антенна
. Антенна ![]() работает на
излучение и прием, а
работает на
излучение и прием, а ![]() работает только
на прием. Для получения оптимальной оценки ИРФ можно воспользоваться алгоритмом
оценки максимального правдоподобия (ОМП):
работает только
на прием. Для получения оптимальной оценки ИРФ можно воспользоваться алгоритмом
оценки максимального правдоподобия (ОМП):
|
|
(4) |
где ![]() – это комплексная амплитуда
эхо-сигнала с каждого элемента дальности от
– это комплексная амплитуда
эхо-сигнала с каждого элемента дальности от ![]() ,
, ![]() - это комплексно-сопряженная
амплитуда от
- это комплексно-сопряженная
амплитуда от ![]() .
.
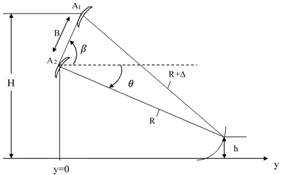
Рис. 2. Геометрия визирования
Измерение наклонных
дальностей происходит в величинах двухстороннено фазового сдвига ![]() в интервале от 0 до 2π, где
в интервале от 0 до 2π, где ![]() – длина волны, что приводит к возникновению проблемы
«свернутой» фазы. Используя (3) можно вывести зависимость изменения ИРФ каждого
пикселя и изменения высоты рельефа:
– длина волны, что приводит к возникновению проблемы
«свернутой» фазы. Используя (3) можно вывести зависимость изменения ИРФ каждого
пикселя и изменения высоты рельефа:
|
|
(5) |
где ![]() –коэффициентом
масштабирования ИРФ,
–коэффициентом
масштабирования ИРФ, ![]() - развернутая
ИРФ.
- развернутая
ИРФ.
4. Выбор основных параметров РЛ комплекса оценки ледовой обстановки
Критерием при выборе
параметров РЛ комплекса является минимизация ошибок измерения. При определении
высоты рельефа ![]() систематические составляющие погрешностей
величин в выражении (3) должны компенсироваться. Поэтому основное внимание
уделяется погрешности, связанной со среднеквадратичной оценкой ИРФ. Источниками
ошибок при проведении интерферометрических измерений может быть интерферометрическая
декорреляция, наложение и затенение радиоизображений при работе по подстилающей
поверхности, боковые лепестки ДНА и двумерной автокорреляционной функции
зондирующего сигнала (ЗС), шумы приемопередающих устройств, ошибки калибровки и
ошибки, связанные с флуктуацией электрической длины пути сигнала РЛС.
систематические составляющие погрешностей
величин в выражении (3) должны компенсироваться. Поэтому основное внимание
уделяется погрешности, связанной со среднеквадратичной оценкой ИРФ. Источниками
ошибок при проведении интерферометрических измерений может быть интерферометрическая
декорреляция, наложение и затенение радиоизображений при работе по подстилающей
поверхности, боковые лепестки ДНА и двумерной автокорреляционной функции
зондирующего сигнала (ЗС), шумы приемопередающих устройств, ошибки калибровки и
ошибки, связанные с флуктуацией электрической длины пути сигнала РЛС.
Среднеквадратичное
отклонение (СКО) полученной по алгоритму ОМП ИРФ зависит от коэффициента
корреляции ![]() между двумя сигналами
между двумя сигналами ![]() и
и ![]() и кратности некогерентного
накопления
и кратности некогерентного
накопления ![]() согласно следующему выражению
согласно следующему выражению
|
|
(6) |

Коэффициент
корреляции между двумя сигналами ![]() и
и ![]() определяется следующим
выражением
определяется следующим
выражением
|
|
(7) |
где ![]() - осреднение по ансамблю. Исходя из
представлений о некоррелированности шумов системы приема сигналов
- осреднение по ансамблю. Исходя из
представлений о некоррелированности шумов системы приема сигналов ![]() может быть получена зависимость
нормированного коэффициента корреляции от геометрии визирования и параметров РЛ
комплекса. Общее выражение для уровня декорреляции, учитывающее
пространственную декорреляцию
может быть получена зависимость
нормированного коэффициента корреляции от геометрии визирования и параметров РЛ
комплекса. Общее выражение для уровня декорреляции, учитывающее
пространственную декорреляцию ![]() выбранного участка поверхности при
приеме эхо-сигналов с разнесенных в пространстве антенн комплекса, а также
объемную декорреляцию
выбранного участка поверхности при
приеме эхо-сигналов с разнесенных в пространстве антенн комплекса, а также
объемную декорреляцию ![]() можно записать как
можно записать как ![]()
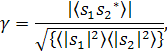
Методика выбора оптимальных параметров РЛ комплекса заключается в широкой вариации исходных данных с целью получения максимальной точности измерений [5]. В результате были получены следующие основные параметры РЛ комплекса: несущая частота - 35 ГГц, угол наклона базы - 90°, разрешающая способность по дальности – 1 м, размер базы – 7 м [6]. На рис. 3 изображена зависимость среднеквадратичной погрешности оценки ординат неровностей рельефа от различных длин баз на несущей частоте 35 ГГц, согласно которой потенциальная точность высотных измерений достигает 5 см.
Рис. 3. Зависимость среднеквадратичной погрешности оценки ординат неровностей рельефа от различных длин баз
Особое
внимание следует обратить при выборе ЗС для радиолокационного комплекса оценки
ледовой обстановки. Анализ эффективности использования линейно-частотно-модулированных
(ЛЧМ) и фазоманипулированных (ФМн) сигналов для решения задач разностно-фазовой
интерферометрии можно провести при помощи имитационной модели. Пусть
сравниваемые ЗС имеют базу сигнала 1023 и ширину полосы ЗС 150 МГц. Размер
облучаемой поверхности - 2046 разрешаемых элементов, удельная эффективная
площадь рассеивания (УЭПР) – 0 дБ. На рис. 4 приводятся графики полученной в
имитационной модели и расчетной ИРФ, отраженных от в среднем плоского рельефа
зондирующих сигналов с ЛЧМ и ФМн (М код длительностью 1023 отсчета), приходящих
на разнесенные в пространстве на 7 м антенны РЛ системы, согласно геометрии
изображенной на рис. 2 (H=32 м, β =90°, несущая частота - 35 ГГц), а также
график фазовых ошибок, полученный путем вычисления разности между
смоделированной и расчетной ИРФ. Результаты имитационного моделирования
показали неприемлемость применения ФМн сигналов в интерферометрических схемах
наблюдений.
|
а)
в) |
б)
г) |
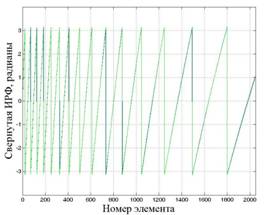
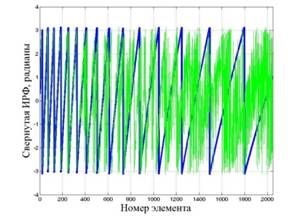
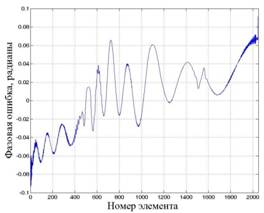
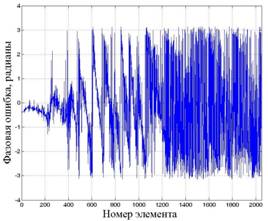
Рис. 4. ИРФ расчетная (синим) и смоделированная (а) и фазовая ошибка (б)
при использовании ЛЧМ в качестве ЗС и ФМн сигнал с М кодом (в)-(г)
Сигналы с ЛЧМ, в связи с низким интегральным уровнем боковых лепестков и низкой чувствительностью к доплеровскому сдвигу частоты, являются предпочтительным видом ЗС для решения задач разностно-фазовой интерферометрии. Пиковый уровень боковых лепестков невзвешенного ЛЧМ сигнала и ФМн с кодовой М последовательностью максимальной длины равен -13,2 дБ и -28,6 дБ соответственно. Также был подсчитан интегральный уровень боковых лепестков эхо-сигналов, который составил -9,7 дБ и -4,8 дБ соответственно. В то же время сигналы с фазовой псевдослучайной манипуляцией в связи с высокой чувствительностью к доплеровскому сдвигу частоты являются предпочтительным видом ЗС для решения задач оценки дальности и скорости движения ледовых полей.
5. Принцип действия РЛ комплекса оценки ледовой обстановки
Общая структурная схема РЛ комплекса оценки ледовой обстановки представлена на рис. 5. Структуру РЛ комплекса можно разделить на три основные подсистемы:
1. Антенную подсистему, которая осуществляет сканирование пространства узким лучом ДНА. В угломестной плоскости один луч перекрывает всю дистанцию. Круговой обзор осуществляется с помощью механического вращения в азимутальной плоскости. В антенной подсистеме, в состав которой входит две разнесенные в пространстве на 7 м антенны А1 и А2, осуществляется перенос с 35 ГГц на промежуточную частоту (ПЧ) 1,5 ГГц, СВЧ коммутация, усиление и модуляция ЗС. Антенна А1 используется как передающая и приемная для обоих режимов работы РЛС, а антенна А2 используется только как приемная при работе в радиоинтерферометрическом режиме.
2. Приемную подсистему, в которой осуществляется перенос в фазовом детекторе принятого сигнала с ПЧ на видеочастоту, полосовая фильтрация. В приемной подсистеме располагается опорный генератор и синтезатор частот, происходит синтез всех необходимых РЛС частот, а также осуществляется выравнивание фазы каждого из каналов.
3. Подсистему цифровой обработки и формирования сигналов.
Управление и синхронизация РЛ комплекса осуществляется в соответствующем блоке, который формирует все служебные команды и необходимые сигналы управления.
Как
было отмечено выше, для проведения интерферометрических измерений предлагается
использовать ЛЧМ сигнал. При работе РЛС происходит сканирование луча антенны с
периодическим запоминанием четвертой части кругового обзора в динамической
памяти и выдача сформированного кадра через сетевой контроллер на устройство
индикации для последующей вторичной обработки. Интерферометрическая обработка
начинается после сжатия и когерентного накопления (усреднения) эхо-сигналов. Последовательность
операций при формировании интерферометрической цифровой модели рельефа
представлена на общей структурной схеме РЛ комплекса оценки ледовой обстановки
изображенной на рис. 5. Отличительной особенностью комплексов морского базирования,
по сравнению с космическими и авиационными комплексами, является достаточно
низкие значения угла места ![]() , а также ярко
выраженная прямоугольная форма пикселей радиоизображений, вытянутых в
азимутальной плоскости.
, а также ярко
выраженная прямоугольная форма пикселей радиоизображений, вытянутых в
азимутальной плоскости.
Разворачивание фазы является одним из наиболее сложных этапов интерферометрической обработки. Не существует оптимального решения проблемы свернутой фазы для всех случаев, следует учитывать как особенности интерферограмм, так и особенности постановки задачи: допустимость искажений, допустимость наличия «пустых» областей, и т.д. В связи с этим, для оценки достоверности пространственно-временной информации о рельефе ледовой поверхности, предлагается поочередно использовать два режима работы РЛ комплекса. В первом режиме формируется ЦМР и оценивается скорость ледовых полей по подвижкам рельефа между съемками. Во втором режиме оценивается одновременно скорость по величине доплеровского сдвига частоты и дальность по времени прихода эхо-сигнала. Сформированные двумя независимыми способами карты скоростей ледовых полей могут служить средством подтверждения достоверности получаемых данных.
Для решения задачи определения скорости ледовых полей (второй режим работы РЛ комплекса) по величине доплеровского сдвига частоты с разрешающей способностью 0,2 м/с в пределах от 0 до 2,2 м/с предлагается использовать 12 цифровых фильтров сжатия (ЦФС) с применением алгоритма «быстрой свертки» [7]. Опорная функция каждого из ЦФС рассогласована по доплеровской частоте на величину, соответствующую скорости цели 0,2 м/с. Требуемая разрешающая способность по скорости достигается путем когерентного накопления 128 периодов ФМн сигнала. Период повторения зондирующих импульсов соответствует рабочей дистанции равной 22 км.
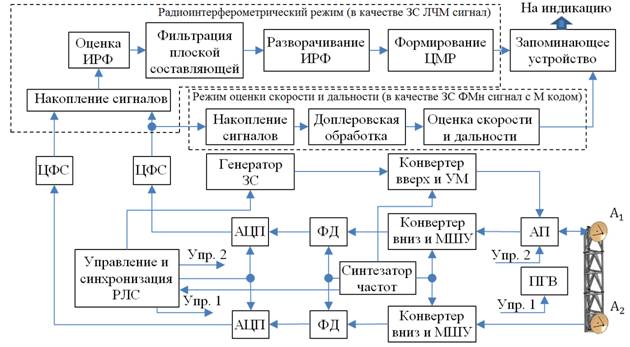
Рис. 5. Структурная схема РЛ комплекса оценки ледовой обстановки, где АП – антенный переключатель, ПГВ – привод горизонтального вращения, МШУ – малошумящий усилитель, УМ – усилитель мощности, ФД –фазовый детектор, АЦП –аналогово цифровой преобразователь, ЗС – зондирующий сигнал, ЦФС – цифровой фильтр сжатия
Скорость дрейфа ледового поля в данных условиях проще определить путем фиксации номера канала накопления когерентных импульсов, в которых сжатые сигналы дают максимум в дискрете по дальности. Описанный выше алгоритм позволяет осуществить параллельное сравнение результатов пороговой обработки всех 12 скоростных каналов и коммутацию результатов, направляемых на запоминающие устройство сектора обзора. Порог обнаружения выставляется в соответствии с заданными характеристиками обнаружения. Превышение установленного порога дает номер дальностного и скоростного каналов, позволяющий определить яркость и адрес элементов вдоль строки обзора.
Результаты имитационного моделирования интерферометрической обработки эхо-сигналов отраженных от ледовой поверхности с заданным рельефом (см. рис. 6), приходящих на разнесенные в пространстве антенны системы, согласно геометрии визирования изображенной на рис. 2 (B=7 м, H=32 м, β =90°, ширина ДНА в азимутальной плоскости – 0,25° и в угломестной - 3°, шаг сканирования по азимуту – 0,25°, сектор обзора по азимуту - 20°, полоса ЗС - 150 МГц, несущая частота - 35 ГГц), представлены на рис. 7. Для разворачивания ИРФ был применен алгоритм Голдштейна-Зебкера-Вернера [8].
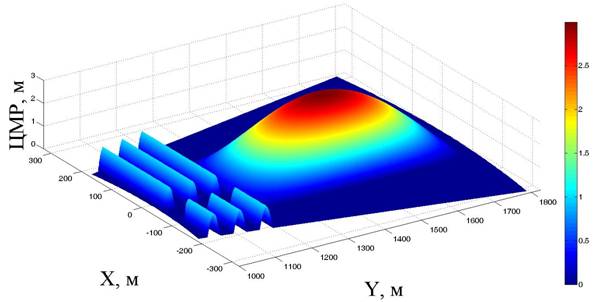
Рис. 6. Рельеф имитируемой поверхности: три гряды торосов высотой 1 м на расстоянии 10 метров друг от друга, а также айсберг высотой 3 м
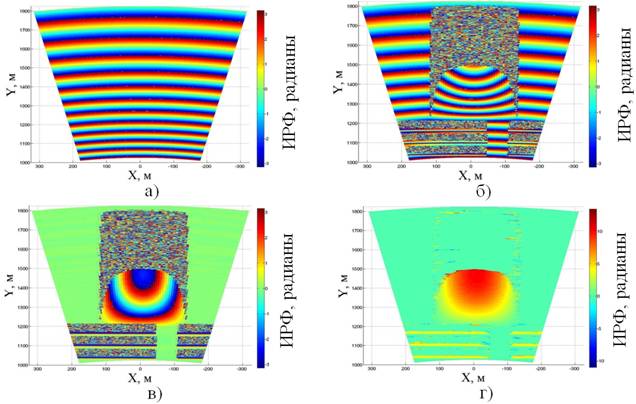
Рис. 7. Фрагмент расчетной интерферограммы плоской поверхности (а), смоделированной в имитационной модели с заданным рельефом (б), с отфильтрованной фазовой составляющей плоской поверхности (в) и с развернутой ИРФ по алгоритму Голдштейна-Зебкера-Вернера (г)
6. Выводы
1. Впервые предложено использовать методы построения высотной топографии, которые используют пару радиолокационных изображений для формирования высокоточной карты высот рельефа с помощью алгоритмов измерения интерферометрической разности фаз сигналов, приходящих на разнесенные в пространстве антенны системы для проведения оценки ледовой обстановки радиолокационным комплексом морского базирования.
2. Моделированием отражений подстилающих покровов показано, что сигналы с ЛЧМ является предпочтительным видом ЗС для решения задач разностно-фазовой интерферометрии. В то же время сигналы с ФМн в связи с высокой чувствительностью к доплеровскому сдвигу частоты являются предпочтительными для решения задач оценки дальности, скорости и направления дрейфа ледовых полей.
3. Использование двух режимов работы радиолокационного комплекса, один из которых одновременно оценивает скорость и дальность, а другой формирует ЦМР, позволяет иметь два источника информации о скорости движения ледовых полей, что может служить средством подтверждения достоверности получаемых данных.
4. Показано, что радиолокационная интерферометрия является эффективным методом измерения рельефа ледовых полей даже при работе по близким к настильным траекториям. Сантиметровая точность измерений достигнута с помощью методики оптимизации параметров радиолокационного комплекса.
Литература
1. Захаров А.И. Исследование динамики ледовых покровов побережья Антарктиды по данным интерферометрической съемки РСА "Алмаз-1" / А.И. Захаров, П.В. Тугаринов // Радиотехника. – 1998. – №8. – С. 27-31.
2. Sadowy G., Heavey B., Moller D., Rignot E., Zawadzki M., Rengarajan S. Technology Demonstration of Ka-band Digitally-Beam formed Radar for Ice Topography Mapping, Aerospace Conference, 2007 IEEE , vol., no., pp.1,10, 3-10 March 2007.
3. Richards M.A. A Beginner's Guide to Interferometric SAR Concepts and Signal Processing [AESS Tutorial IV], Aerospace and Electronic Systems Magazine, IEEE , vol.22, no.9, pp.5,29, Sept. 2007.
4. Timco G.W., Burden R.P. An analysis of the shapes of sea ice ridges. Cold. Reg. Sci. and Tecnol., 1997, v25, p.65-77.
5. Смирнов Е.П., Баскаков А.И., Исаков М.В., Лукашенко Ю.И. Радиолокационные методы обнаружения опасных ледовых полей в районах нефтегазодобычи на шельфах арктических морей// Сборник докладов VI Всероссийской конференции «Радиолокация и радиосвязь». — Москва: JRE - ИРЭ им. В.А.Котельникова РАН, 2012. — Т. 2. — С. 302-303.
6. Патент № 2467347, Российская Федерация. Способ обнаружения и высокоточного определения параметров морских ледовых полей и радиолокационная система, его реализующая. Патентообладатели Баскаков А.И., Егоров В.В., Исаков М.В., Лукашенко Ю.И., Пермяков В.А. // Приоритет от 08.04.2011 г., опубликован 20.11.2012 г. в Бюллетене изобретений № 32.
7. Смирнов Е.П. Реализация многоканального устройства цифровой обработки сигналов для комплекса оценки ледовой обстановки// Вестник МЭИ, 2013, №4. – С. 124-129.
8. Goldstein R. M., Zebker H. A., Werner C. L. Satellite radar interferometry: two-dimensional phase unwrapping. Radio Science, 23, 4 (1989), 3268—3270.