УДК 621.313
МАНИПУЛИРОВАНИЕ МИКРО- И НАНООБЪЕКТАМИ ПРИ ПОМОЩИ ЭФФЕКТА ПАМЯТИ ФОРМЫ
А. В. Маширов1, В. А. Дикан2, А. В. Иржак2, Д. И. Захаров2, П. В. Мазаев1,
А. М. Жихарев1, А. П. Каманцев1, В. С. Калашников1, В. В. Коледов1,
А. В. Шеляков3, В. Г. Шавров1
1Институт радиотехники и электроники им. В.А. Котельникова РАН
2 НИТУ «МИСиС
3 НИЯУ «МИФИ
Статья получена 10 декабря 2014 г.
Аннотация. Настоящая работа посвящена созданию и исследованию устройства захвата микро- и нанообъектов – нанопинцета – с рабочим телом из биметаллического композитного материала, включающего слой быстрозакаленного сплава с эффектом памяти формы (ЭПФ) Ti2NiCu и слой платины. Предложен способ изготовления композитного материала методом локального ионного травления и ионно-стимулированного осаждения из газовой фазы. Описана конструкция нанопинцета на его основе, а также эксперименты по захвату и перемещению объектов субмикронных размеров. Для активации нанопинцета использован разогрев излучением полупроводникового инжекционного лазера. Продемонстрировано манипулирование следующими объектами: пучками углеродных нанотрубок, стопками графеновых листов, вискерами квазиодномерного проводника TaS3 и биологическими объектами.
Ключевые слова: биметаллический композиционный материал, манипулирование микро- и нанообъектами, нанопинцет, эффект памяти формы.
Abstract. This work describes creation and research of a device for grabbing micro- and nanoobjects, so called “nanotweezers”, with operating body made of two-layer composite material consisting of rapidly quenched layer of Ti2NiCu with shape memory and amorphous layer of Pt. A certain way of manufacturing of such a material is proposed, by using localized ion etching and ion-beam stimulated chemical vapor deposition. Authors describe a construction of “nanotweezers” they made using these techniques and also a series of experiments on grabbing and manipulation of real submicron-sized objects. A radiation of infrared semiconductor laser was used to perform actuation. A probability of manipulation of objects, like carbon nanotubes, graphene sheets, TaS3 whiskers and biological objects, was shown experimentally.
Keywords: bimetallic composite material, manipulation of micro- and nanoobjects, nanotweezers, shape memory effect.
Введение
Во многих отраслях физики, технологии, биологии и медицины в настоящее время назрела потребность не только изучать, но и эффективно манипулировать: захватывать, перемещать, деформировать индивидуальные нанообъекты, например, углеродные нанотрубки, живые и неживые частицы различной природы, клетки и их органеллы и т.д. Ставится задача не просто изучения, а создания сложных систем из этих объектов самого различного назначения. Однако, для манипулирования малыми объектами чаще всего нужен миниатюрный инструмент. Изготовление инструмента на микро- и тем более наномасштабе весьма затруднено и на сегодняшний день габарит, например «наноманипулятора» - это несколько сантиметров или десятков сантиметров. Свою функцию современные приборы выполняют с использованием актюаторов, например, пьезоэлектрических, габарит которых принципиально ограничен используемым физическим эффектом. Например, доступные относительные деформации пьезопреобразователей составляют не более 10-4, поэтому габарит устройства будет на много порядков превосходить диапазон контролируемых перемещений. В последнее время микроактюаторы на основе тонкомерных материалов с ЭПФ становятся предпочтительными по многим аспектам в быстроразвивающейся области микромеханических систем. Разработаны микроустройства различного типа, такие как микрозахваты, переключатели (коммутаторы), клапаны (затворы), насосы, датчики. Однако для более широкого и эффективного применения большинства из них требуется уменьшение габаритов и улучшение функциональных характеристик. Таким образом, весьма актуальна задача поиска физических принципов контролируемых «гигантских» деформаций с предельно высокими значениями, вплоть до единиц и десятков процентов, и создания на основе этих принципов инструментов реально микроскопических и наномасштабных габаритов.
Цели настоящей работы: применение нового способа изготовления композитного наноактюатора с эффектом памяти формы, создание устройства-манипулятора на основе биметаллического композитного материала с ЭПФ и проведение экспериментов по перемещению реальных объектов субмикронных размеров.
Требования миниатюризации, повышения экономичности и быстродействия устройств приводят к необходимости разработки и исследования новых функциональных материалов, в частности на основе сплавов с ЭПФ. Сплавы с ЭПФ обладают набором превосходных свойств, в частности: высокая прочность материала (рабочее давление может достигать сотен МПа) [1], способность возвращать большие деформации (до 10% в нетренированных образцах) и развивать значительные усилия при нагреве и охлаждении [2], сверхупругость, высокая демпфирующая способность [3], хорошая коррозионная стойкость [4] и биосовместимость [5].
На сегодня известно достаточно большое количество сплавов с ЭПФ, например, AuCd, FeMn, MnCu, NiAl, CuZn, CuAl и другие. Но наиболее полно отвечают этому комплексу требований сплавы на основе TiNi. Первые работы по созданию актюатора из тонкой пленки из сплава TiNi, полученной методом магнетронного распыления, опубликованы в 1990 году [6], [7]. Было показано наличие в них эффекта памяти формы вплоть до толщины долей микрона. С момента публикации этих базовых работ изучение режимов осаждения, структурных исследований и внедрения в MEMS-технологию идет быстрыми темпами [8-10]. С ростом потребности в микроактюаторах увеличивалось и количество исследовательских работ, посвящённых применению пленок никелида титана в составе MEMS-систем. Фундаментальным воплощением концепции TiNi-актюатора стал двуслойный кантилевер, описанный в работе [11]. Авторы статьи изготовили ЭПФ-микробалку, напылив слой TiNi на кремниевый кантилевер толщиной 15 мкм. Рабочий цикл композита они проводили, используя модель, предложенную в работе [12]. В процессе циклирования TiNi/Si-кантилевер нагревали до 120°C, затем охлаждали до комнатной температуры, демонстрируя двусторонний эффект памяти формы.
Однако, такой подход при переходе на субмикронный масштаб связан с известными ограничениями. Пленки, полученные методом магнетронного напыления, отличаются неоднородностью структуры. Необходимость отжига осажденных пленок для рекристаллизации и появления в них эффекта памяти формы способствует диффузии элементов подложки и образованию окислов на поверхности пленки. Оба этих фактора уменьшают полезный объем сплава, способный впоследствии претерпевать обратимую деформацию. Кроме того, наличие в осажденных пленках внутренних напряжений по нескольким направлениям снижает эффективность изгибной деформации вдоль одной выбранной оси без проведения тренировки образцов на двустороннюю память формы, практически неосуществимой в микромеханике.
1. Биметаллический композиционный материал с ЭПФ
В настоящей работе описывается применение схемы биметаллического композиционного материала, предложенной в [13-16] (рис. 1), на основе ленты сплава Ti2NiCu, полученной сверхбыстрой закалкой из расплава [17].
Биметаллический композиционный материал состоит из двух слоев одинаковой толщины интерметаллического соединения c ЭПФ Ti2NiCu и металла, выполняющего функцию упругого слоя. До соединения с упругим слоем, слой с ЭПФ подвергается псевдопластической деформации растяжения вдоль одного преимущественного направления. Операция соединения слоев производится при температуре ниже температуры перехода аустенит-мартенсит. В результате, композит приобретает способность к гигантским обратимым изгибным деформациям. В основе его работы лежит обратимая изгибная деформация композитной пластины. При нагреве сплав с ЭПФ переходит в аустенитное состояние и сжимается, деформируя на растяжение упругий слой и изгибая композит. При охлаждении слой с ЭПФ возвращается в мартенситное состояние. При этом упругий слой, сжимаясь, растягивает слой с ЭПФ и возвращает композит к прямолинейной форме (рис.2).
Испытания на выносливость показали, что композит может выдержать более 2000 циклов «нагрев-охлаждение»). С увеличением числа термоциклов его работоспособность снижается, причем распрямляется он хуже, чем сжимается. Это объясняется тем, что усталость проявляется прежде всего в упругом слое, а слой с ЭПФ сохраняет свои свойства значительно дольше.
|
|
|
Рис. 1. Схема биметаллического композиционного материала с ЭПФ: 1) предварительно растянутый слой с ЭПФ (в мартенситном состоянии); 2) биметаллический композит со слоем с ЭПФ и упругим слоем; 3) биметаллический композит при нагреве до температуры выше температуры мартенситного перехода (в аустенитном состоянии); 4) биметаллический композит после охлаждения до исходной температуры (в мартенситном состоянии после термоциклирования).
|
|
|
|
Рис.2. Гигантские обратимые изгибные деформации биметаллического композиционного материала на температурном столике с индикацией температуры, где слой с ЭПФ – Ti2NiCu, упругий слой – гальванически нанесенный никель. Для просмотра медиа-файла воспользуйтесь ссылкой. |


При помощи локального ионного травления и ионно-стимулированного осаждения из газовой фазы производилось изготовление образцов нанопинцетов, где рабочим элементом применили биметаллический материал на основе композиции Ti2NiCu/Pt. Нанопинцет устанавливали на нанопозиционер Omniprobe, расположенный в вакуумной камере ионного микроскопа FEI FIB Strata 201. Нагревание для срабатывания нанопинцета производили при помощи полупроводникового инжекционного лазера.
2. Эксперименты по исследованию возможности трехмерного манипулирования реальными нанообъектами, такими как углеродные нанотрубки, графеновые листы, наночастицы и нановолокна
В процессе исследовательской работы были проведены эксперименты, в которых рассматривалась возможность манипулирования микро- и нанообъектами различной природы, в том числе и биологическими. Эксперименты по манипулированию проводились в камере ионного сканирующего микроскопа FEI Strata 201, оборудованного микроманипулятором Оmniprobe и системой управления нанопинцетом (электрическая цепь с полупроводниковым лазером, приводящим в действие нанопинцет посредством теплового излучения). К игле манипулятора, которая имеет шаг позиционирования 10 нм, был пристыкован нанопинцет. Таким образом, была обеспечена возможность помещения манипулируемого объекта в рабочую часть нанопинцета, зажим этого объекта, перемещение в заданную точку пространства с дальнейшим освобождением манипулируемого объекта из рабочей части нанопинцета.
Были изготовлены экспериментальные образцы нанопинцета пристыкованного к игле микроманипулярора со следующими рабочими характеристиками: размер исполнительного композитного элемента ДхШхВ: (15-25) х(0.8-1)х(1-3) мкм, габаритные размеры нанопинцета ДхШхВ: (30-50)х(1-3)х(10-30) мкм, створ рабочей части нанопинцета 1-3 мкм, диаметр окончания микропроволоки 10-20 мкм, рабочий ток и мощность управляющего источника оптического излучения 0.9А и 0.4Вт, размер рабочего поля (пространство манипулирования) 500х500 мкм, время срабатывания нанопинцета не более 200 мс. Среднее время изготовления конструкции нанопинцета и состыковка его с иглой манипулятора составляло 2 часа.
2.1. Исследование возможности трехмерного манипулирования углеродными нанотрубками
Объект манипулирования: пучок УНТ 0.5-3 мкм, полученный из углеродного наноматериала «TAUNIT». Некоторые характеристики манипулируемого материала приведены в таблице 1.
Таблица 1. Характеристики наноматериала «TAUNIT»
|
Характеристика |
Величина |
|
Внешний диаметр, нм |
20÷40 |
|
Внутренний диаметр, нм |
5÷10 |
|
Длина, мкм |
2 и более |
|
Чистота (%) включения аморфного углерода |
До 1,5 0,3÷0,5 |
|
Плотность (г/см3) |
0,4÷0,5 |
Манипулирование производилось по следующему алгоритму: подвод объекта манипулирования в створ рабочей части нанопинцета – захват объекта – перемещение объекта в составе узла «нанопинцет-микроманипулятор OmniProbe» - отстыковка объекта из створа рабочей части.
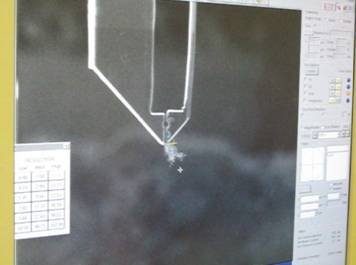
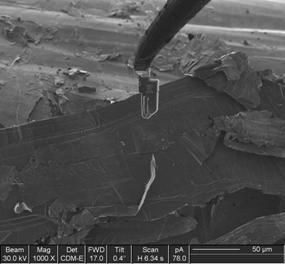
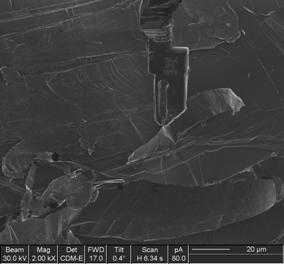
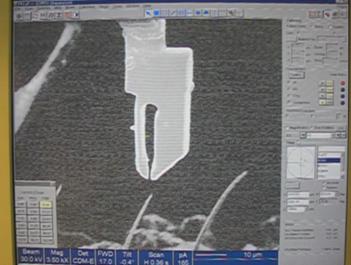
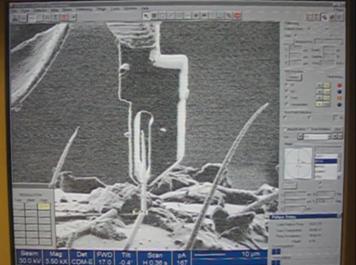
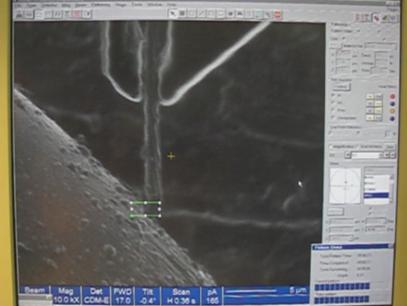
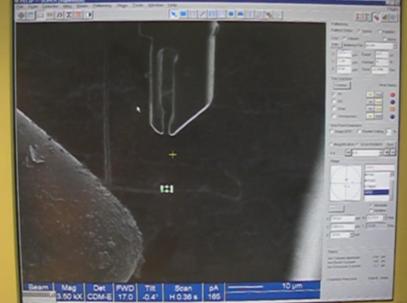
На рис. 3 и 4 показаны кадры из видеофильма (рис. 8) по алгоритму: подвод объекта манипулирования в створ рабочей части нанопинцета – захват объекта – перемещение объекта в составе узла «нанопинцет-микроманипулятор OmniProbe».
|
|
|
|
Рис. 3. Подвод и захват пучка УНТ диаметром 0.5 мкм |
|


|
|
|
Рис. 4. Перемещение отдельной УНТ диаметром менее 30 нм |

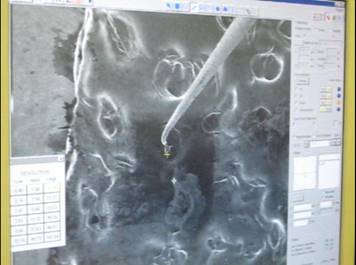
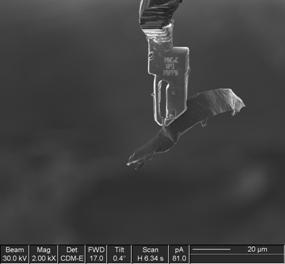
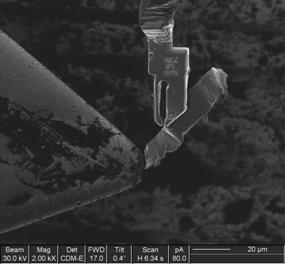
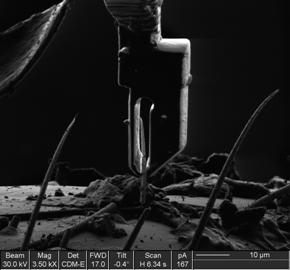
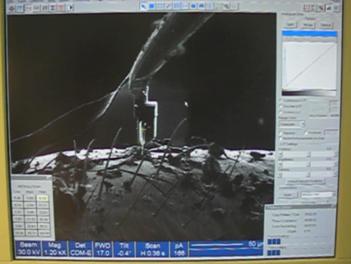
На следующих кадрах из видеофильма процесса манипулирования (рис. 5,6 ) показано перемещение пучка диаметром 3-4 мкм, состоящего из отдельных УНТ диаметром 20-50 нм.
|
|
|
|
Рис. 5. Перемещение пучка УНТ диаметром 3-4 мкм |
|

|
|
|
|
Рис. 6. Перемещение пучка УНТ диаметром 3-4 мкм на фоне предметного столика ионного сканирующего микроскопа |
|

Далее при приближении нанопинцета с манипулируемым объектом к торцу предметного столика (рис. 7), наблюдалось вытягивание пучка УНГ в направлении предметного столика, вероятно, за счет их электростатического взаимодействия.
|
|
|
|
|
Рис. 7. Приближение к торцу нанопинцета (слева) и вытягивание пучка УНТ (справа) |
|
|
|
|
||
|
Рис. 8. Манипулирование углеродными нанотрубками при помощи нанопинцета Для просмотра медиа-файла воспользуйтесь ссылкой.
|
||

2.2. Исследования возможности трехмерного манипулирования графеновыми листами
Объектом манипулирования служили слои графена 80х20 мкм (длина х ширина), расположенные на поверхности кристалла пиролитического графита.
Алгоритм манипулирования: подвод объекта манипулирования в створ рабочей части нанопинцета – зажим объекта в рабочей части – пространственное перемещение объекта в составе узла «нанопинцет-микроманипулятор Omniprobe» - отстыковка объекта из створа рабочей части (состоялось частично).
После этапа подвода объекта в створ рабочей части удалось захватить графеновые листы, которые свободно лежали на поверхности графита (рис. 9, 10), извлечение графеновых листов из состава графита не могло быть проделано по причине не достаточного зажимного усилия нанопинцета (см. гл. 3).
|
|
|
|
Рис. 9. Поиск (слева) и захват графеновых листов с поверхности графита (справа) |
|

После захвата графеновые листы перемещались в заданную точку пространства.
|
|
|
|
Рис. 10. Пространственное перемещение графеновых листов. |
|
Отстыковку графеновых листов от нанопинцета планировалось провести путем припаивания конца листов к металлической полусетке просвечивающего электронного микроскопа (рис. 11) и дальнейшим выводом объекта манипулирования из рабочей части пинцета. Но при приближении нанопинцета к полусетке на расстояние 5-10 мкм произошло незапланированное раскрытие стыка и отлет графеновых листов от нанопинцета. Это явление можно объяснить сильным кулоновским отталкиванием, возникшим между частицей слоев графена и подложкой.
|
|
|
|
Рис. 11. Пространственное приближение графеновых листов в нанопинцете к металлической полусетке ПЭМ |
|

2.3. Проведение экспериментов по исследованию возможности трехмерного манипулирования наночастицами различной природы
На данном этапе работы объектом манипулирования служил стержень органической природы 0.5-3х25 мкм (диаметр х длина).
Алгоритм манипулирования: подвод объекта манипулирования в створ рабочей части нанопинцета – захват объекта – перемещение объекта в составе узла «нанопинцет-микроманипулятор Omniprobe» - отстыковка объекта из створа рабочей части (рис. 19).
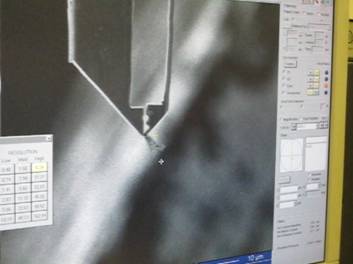
Одним из объектом манипулирования служит волос на тельце обыкновенного комара (лат. Culex pipiens) диаметром 0.5-3 мкм. Манипулирование производилось по полному алгоритму.
На этапе подвода объекта манипулирования в створ рабочей части нанопинцета наблюдалось действие кулоновских сил отталкивания, которые затрудняли выполнение операции подвода и зажима. На рис. 12 показаны кадры из видеофильма вышеописанных операций подвода и зажима объекта манипулирования (рис. 18).
|
|
|
|
Рис. 12. Подвод объекта манипулирования в створ рабочей части нанопинцета (слева), зажим объекта манипулирования нанопинцетом (справа). |
|

После зажима объекта манипулирования наблюдалось его удержание в сомкнутом створе рабочей части нанопинцета при относительно большом изгибе волоса, путем смещения нанопинцета.
|
|
|
|
Рис. 13. Зажим объекта манипулирования нанопинцетом, нанопинцет находится на разных расстояниях от места зажима. |
|


Так как объект по своей природе закреплен в тельце насекомого, то его после зажима требовалось отделить для транспортировки, что было успешно выполнено (рис. 14) при помощи ионного травления в камере ионного сканирующего микроскопа.
|
|
|
|
Рис 14. Процесс ионного травления волоса (слева), фотография объекта манипулирования в створе рабочей части нанопинцета и оставшаяся заделка в тельце насекомого сразу после окончания травления (справа). |
|
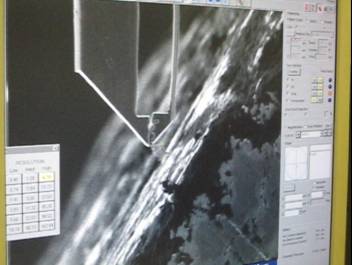
После освобождения объекта от связи с тельцем насекомого производилось его пространственное перемещение относительно предметного столика. На рис. 15 и 16 показано перемещение нанопинцета с объектом манипулирования от тельца насекомого к металлической сеточке просвечивающего электронного микроскопа.
|
|
|
||
|
Рис. 15. Нанопинцет с объектом манипулирования вблизи тельца насекомого. |
|||
|
|
|
|
|
|
Рис. 16. Нанопинцет и объект манипулирования переносится от тельца насекомого (слева) к металлической оснастке ПЭМ (справа) |
|
||



При незначительной гравитационной силе отделение объекта манипулировании от нанопинцета путем простого раскрытия створа рабочей части невозможно, также не предусмотрен механизм механического отделения или отделения путем электромагнитного взаимодействия, поэтому такое отделение производилось при помощи припаивания конца волоска к неподвижной оснастке ПЭМ и дальнейшего механического вывода объекта из створа. Такая успешная манипуляция продемонстрирована на видеофрагментах рис. 17.
|
|
|
|
|
Рис. 17. Процесс припаивания волоска (ионное осаждение платины из газовой фазы) к металлической сеточке ПЭМ (слева), волосок насекомого, припаянный к полусетке ПЭМ и освобожденный нанопинцет (справа). |
||
|
|
||
|
Рис. 18. Манипулирование биологическими объектами при помощи нанопинцета. Для просмотра медиа-файла воспользуйтесь ссылкой.
|
||

При помощи нанопинцета была показана возможность манипулирования вискерами Ta3S, а именно: выделение отдельных нитевидных кристаллов из общего ростового массива, перенос и закрепление его концов на двух контактных площадках с целью измерения удельного сопротивления (рис. 19).
|
|
|
|
Рис. 19. Захват вискера Ta3S (слева); вискер Ta3S, закрепленный на контактных площадках. |
|


В результате проведенной работы было экспериментально показана возможность трехмерного манипулирования микро- и нанообъектами различной природы при помощи нанопинцета на основе материала с эффектом памяти формы. Такое манипулирование было продемонстрировано на примере пучка УНТ, отдельной УНТ, стопки графеновых листов и биологическом объекте – части тела комара.
Было обнаружено, что при манипулировании малыми объектами достаточной протяженности значительное влияние начинают оказывать силы молекулярного притяжения. С другой стороны, на микро- и нанообъекты, имеющие протяженность, сравнимую по размерам с самим нанопинцетом (1-10 мкм) силы молекулярного притяжения значительного воздействия не оказывают.
3. Демонстрационные эксперименты по исследованию рабочих (функциональных) характеристик узла «нанопинцет-микроманипулятор Omniprobe»в ионном сканирующем микроскопе
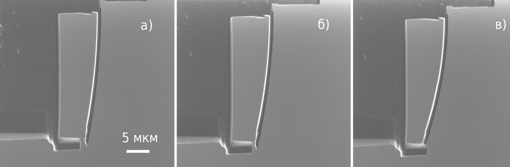
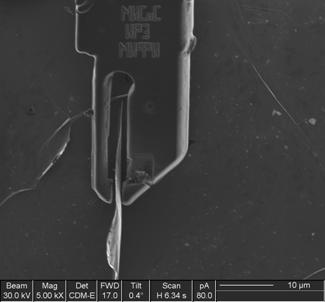
Время срабатывания нанопинцета на примере экспериментального образца рис. 20,21 определялось с помощью цифрового секундомера путем визуального наблюдения. Нагрев нанопинцета проводили при помощи лазера с мощностью достаточной для полного сжатия. Рабочий ток и мощность управляющего источника оптического излучения 0.9А и 0.4Вт. Минимальная скорость срабатывания нанопинцета в данном случае определяется скоростью фазового перехода в сплаве Ti2NiCu и скоростью включения и выключения системы управления лазерным нагревом, второй можно пренебречь как очень малой величиной. Измеренная минимальная скорость срабатывания нанопинцта при нагревании полупроводниковым лазером составила около 200 мс.
Изготовленные экспериментальные образцы нанопинцета имели минимальный ресурс срабатывания 10 циклов, а максимальный − боле 150 циклов. После срабатывания 2-3 циклов испытаний наблюдалась некоторая деградация нанопинцетов, выглядящая как появление постоянного изгиба композиционной балки и, соответственно, некоторое уменьшение величины зазора между губками нанопинцета. В процессе последующих циклов деградация практически не наблюдалась.
|
|
||
|
а |
б |
в |
|
Рис.
20. Срабатывание нанопинцета при нагреве ИК-лазером: |
||
|
|
||
|
Рис. 21.
Демонстрация реального времени срабатывания нанопинцета на примере
экспериментального образца. |
||

При манипулировании с наноуглеродным волокном произошло механическое деформирование композитной пластины, как показано на рис. 22. Нанопинцет упирался со стороны композитной пластины в торец предметного столика, который в дальнейшем перемещали в сторону нанопинцета. Таким образом создавалось давление на часть композитной пластины. Наблюдалось смещение композитной пластины поперек тела нанопинцета с последующим пересечением рабочих частей, а при снятии нагрузки композитная пластина самостоятельно возвращалась в исходное положение. Во время деформирования композиционной пластины сам узел «нанопинцетмикроманипулятор Omniprobe» оставался неподвижен, т.е. деформировалась только часть с композиционной пластиной.
|
|
|
Рис. 22. Механическое упругое деформирование внешними силами композитной ножки нанопинцета по направлению сжатия |

При выполнении захвата графеновых слоев было произведено деформирование композитной ножки нанопинцета внешними силами против направления срабатывания (рис.23). При снятии нагрузки наблюдалось самостоятельное возвращение в исходное положение.
|
|
|
Рис. 23. Механическое упругое деформирование внешними силами композитной ножки нанопинцета против направления сжатия |
В процессе манипулирования было произведено разрушение паяльного соединения путем механической нагрузки. Нанопинцет упирался нижней стороной в вертикально перемещающийся предметный столик, который далее поднимался в направлении нанопинцета: наблюдалось разрушение паяльного соединения (рис. 24), а при снятии нагрузки нанопинцет самостоятельно отделился от иглы микроманипулятора. При этом сам нанопинцет остался неповрежденным, и его можно использовать, предварительно припаяв к игле микроманипулятора.
|
|
|
Рис. 24. Разрушение паяльного соединения при механическом воздействии. |

При срабатывании нанопинцета нагреванием иглы микроманипулятора OmniProbe, было произведено разрушение паяльного соединения нанопинцета с иглой манипулятора путем термического разрушения припоя платины. На рис. 25 показан нанопинцет после разрушения, который держится на игле наноманипулятора вероятно за счет сил кулоновского притяжения.
|
|
|
Рис. 25. Разрушение паяльного соединения при тепловом воздействии |

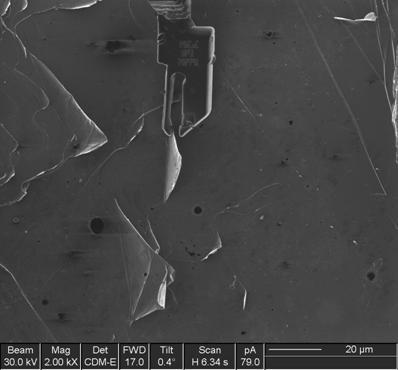
Важной технической характеристикой пинцета является усилие, развиваемое конструкцией нанопинцета в рабочей части, т.к. для манипулирования объектами, иногда требуется зажимать не только свободные микро- и наночастицы, но и частицы, находящиеся в относительно сильных связях с окружающими телами. Так в эксперименте по манипулированию графеновыми слоями была произведена попытка зажать и отделить углеродные слои с поверхности графита (рис. 26). В результате наблюдалось, что усилия развиваемое нанопинцетом для этого не достаточно.
|
|
|
Рис. 26. Слои графена в рабочей части нанопинцета |
В эксперименте по манипулированию наночастицами различной природы удалось наблюдать деформирование волоса толщиной 500 нм, зажатого с двух концов в естественной заделке в теле насекомого и в нанопинцете (рис. 27). Деформирование производилось путем перемещения нанопинцета, предварительно захватив волос в рабочей части нанопинцета. Наблюдалось, что при описываемых деформациях развиваемого усилия нанопинцета было достаточно для удержания волоса в рабочей части нанопинцета без проскальзывания.
|
|
|
Рис. 27. Деформирование волоса нанопинцетом |
Также интересен эксперимент по качественной оценке развиваемого усилия при попытке оторвать микрообъект от клейкой подложки предметного столика ионного микроскопа. Как показано на рис. 28 микрообъект был успешно зажат в рабочей части нанопинцета, но далее при начальных действиях манипулирования, микрообъект выскальзывал из рабочей части, т.е. развиваемого усилия было не достаточно, чтобы оторвать микрообъект от клейкой подложки.
|
|
|
Рис. 28. Зажим микрообъекта, находящегося на клейкой подложке
|

Отличительной особенностью манипулирования объектами в микро- и наномире является ярко выраженное проявление кулоновских сих. Так при попытке захвата нановолокон вискера происходило либо отталкивание, либо притяжение (рис. 29) нановолокна от элементов конструкции нанопинцета, что можно было визуально наблюдать при помощи ионного микроскопа.
|
|
|
Рис. 29. Притяжение нановолкна к элементам конструкции нанопинцета |

Кулоновское отталкивание, возникшее между частицей графенового листа и держателем - полусеткой ПЭМ не позволило зафиксировать частицу на полусетке и освободить нанопинцет (рис. 30).
|
|
|
Рис. 30. Графеновый лист, отталкиваемый от держателя-полусетки ПЭМ кулоновскими силами |
В результате проведенных исследований был получен способ изготовления и стыковки микроманипулятора и нанопинцета с использованием микроманипулятора Omniprobe 200 фирмы Omniprobe.
Были исследованы упругие механические воздействия на узел «микроманипулятор Omniprobe-нанопинцет». При упругом деформировании композиционной балки на величину порядка 1-1,5 мкм в сторону сжатия или разжатия нанопинцета, сам узел микроманипулятор-нанопинцет не разрушался.
Скорость срабатывания нанопинцета определяется скоростью прямого и обратного фазового перехода мартенсит-аустенит и скоростью срабатывания электронй системы управления нагревом. Минимальная скорость срабатывания составила примерно 200 мс.
Максимальное измеренное количество циклов «сжатие-разжатие» нанопинцета составило боле 150 раз. При этом после 2-3 цикла наблюдалась некоторая деградация нанопинцета, т.е композиционная балка приобретала постоянный изгиб. Дале деградации не наблюдалось.
Максимальная тепловая нагрузка на узел «микроманипулятор Omniprobe-нанопинцет» не должна превышать 85% мощности лазера. При большей нагрузке наступает разрушение паяльного соединения и упругого металлического слоя.
В результате исследований было обнаружено значительное кулоновское взаимодействие, возникающее между объектами манипулирования и нанопинцетом. Такое взаимодействие может значительно осложнить процесс манипулирования нанообъектами, поэтому необходимо проводить исследования по нейтрализации возникающих электростатических зарядов.
4. Заключение
Сформулируем основные выводы настоящей работы.
1. На основе быстрозакаленного сплава при помощи локального ионного травления и ионно-стимулированного осаждения из газовой фазы изготовлены образцы композитных нанопинцетов Ti2NiCu/Pt. Размеры образцов нанопинцетов 30х(1-3)х10 мкм, толщина активного слоя с ЭПФ 0,5 мкм.
2. Система управления включает полупроводниковый инжекционный лазер, нанопозиционер Omniprobe, расположенный в вакуумной камере ионного микроскопа FEI FIB Strata 201.
3. Контролируемый зазор нанопинцета составляет 0,5-1 мкм. Размер манипулируемых объектов может составлять от 0,03 до 1 мкм.
4. Проведены эксперименты по манипулированию пучком УНТ, отдельной УНТ, стопкой графеновых листов и волокон биологического происхождения.
Исследование выполнено за счет гранта Российского научного фонда (проект № 14-19-01644) в Институте радиотехники и электроники им. В.А. Котельникова РАН.
Литература
1. Compressive response of NiTi single crystals / Sehitoglu H., Karaman I., Anderson R. et al. // Acta Materialia - 2001 - Vol. 49 - № 4 - P. 747 - 747.
2. Thermomechanical aspects of NiTi / Shaw J. and Kyriakides S. // Journal of the Mechanics and Physics of Solids - 1995 - Vol. 43. - № 8 - P. 1243 - 1281.
3. An overview of vibration and seismic applications of NiTi shape memory alloy / Saadat S., Salichs J., Noori M. et al. // Smart Materials and Structures - 2002 - Vol. 11. - № 2 - P. 218 - 229.
4. Electrochemical and surface characterization of a nickel-titanium alloy / Wever D., Veldhuizen A., de Vries J. et al. // Biomaterials - 1998 - Vol. 19 - № 7-9 - P. 761 - 769.
5. Review of in vitro studies on the biocompatibility of NiTi alloys / Ponsonnet L., Treheux D., Lissac M. et al. // International Journal of Applied Electromagnetics and Mechanics - 2006 - Vol. 23 - № 3-4 - P. 147 - 151.
6. Thin-film processing of tini shape memory alloy / Walker J., Gabriel K. and Mehregany M. // Sensors and Actuators A: Physical - 1990 - Vol. 21 - № 1–3 - P. 243 - 246.
7. Shape-memory properties in Ni-Ti sputter-deposited film / Busch J., Johnson A.D., Lee C. and Stevenson D. // Journal of Applied Physics - 1990 - Vol. 68 - № 12 - P. 6224-6228.
8. Shape memory alloys for microsystems: A review from a material research perspective / Bellouard Y. // Materials Science and Engineering A - Structural Materials Properties Microstructure and Processing - 2008 - Vol. 481, - № , - P. 582-589.
9. Tini-based thin films in mems applications: a review / Fu Y., Du H., Huang W. et al. // Sensors and Actuators A: Physical - 2004 - Vol. 112 - № 2-3 - P. 395 - 408.
10. Reversible SMA actuator for micron sized robot / Kuribayashi K., Yoshitake M. and Ogawa S. // - 1990 - P. 217-221.
11. Characterization of tini shape-memory alloy thin films for MEMS applications / Fu Y., Huang W., Du H. et al. // Surface and Coatings Technology - 2001 - Vol. 145, - № 1-3. - P. 107 - 112.
12. One-Dimensional Thermomechanical Constitutive Relations for Shape Memory Materials / Liang C. and Rogers C. // Journal of Intelligent Material Systems and Structures - 1990 - Vol. 1 - № 2 - P. 207-234.
13. Патент РФ № 2381903 - Композитный функциональный материал / Кирилин А.Г., Коледов В.В., Кучин Д.С. et al. // - 2010.
14. D.Zakharov, G.Lebedev, A.Irzhak, V.Afonina, A.Mashirov, V.Kalashnikov, V.Koledov, A.Shelyakov, D.Podgorny, N.Tabachkova, V.Shavrov. Submicron-sized actuators based on enhanced shape memory composite material fabricated by FIB-CVD // Smart materials and structures. Vol. 21, № 5, 052001 (2012).
15. Artemy Irzhak, Viktor Koledov, Dmitry Zakharov, Gor Lebedev, Alexey Mashirov, Veronika Afonina, Kristina Akatyeva, Vladimir Kalashnikov, Nikolay Sitnikov, Natalia Tabachkova, Alexander Shelyakov, Vladimir Shavrov. Development of laminated nanocomposites on the bases of magnetic and non-magnetic shape memory alloys: Towards new tools for nanotechnology // Journal of Alloys and Compounds, 586, S464–S468 (2014).
16. А.В.Маширов. Исполнительный элемент микромеханического устройства на основе биметаллического композита с эффектом памяти формы // Нелинейный мир, 2011, Т.9, Вып. 1, с. 40-41.
17. Гигантские обратимые деформации композитного материала с эффектом памяти формы // Иржак А.В., Калашников В.С., Коледов В.В. et al. // Письма в ЖТФ - 2010 - Vol. 36 - № 7.