УДК 621.396.62
НЕОДНОЗНАЧНОСТЬ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ В МАТРИЧНОМ ПРИЕМНИКЕ
А. С. Подстригаев1, В. П. Лихачев 2
1 Брянский государственный технический университет
2 Военный учебно-научный центр Военно-воздушных сил
"Военно-воздушная академия им. проф. Н. Е. Жуковского и Ю. А. Гагарина" (Воронеж)
Статья получена 20 февраля 2015 г.
Аннотация. Рассмотрены причины возникновения неоднозначности определения частоты сигналов в матричном приемнике: наличие паразитных полос пропускания и малая крутизна АЧХ канальных фильтров, одновременный прием сигналов на нескольких частотах. Выполнен анализ эффективности использования возможных способов снижения неоднозначности различного рода. Предложен способ снижения неоднозначности при одновременном приеме сигналов на нескольких частотах.
Ключевые слова: неоднозначность, матричный приемник, паразитная полоса, стык каналов, крутизна АЧХ, бинарный обнаружитель, избирательность, грубое определение частоты, неоднозначность определения частоты, четные каналы.
Abstract. The causes of frequency determination ambiguity in matrix receiver are considered: a presence of channel filter parasitic pass bands, a small slope of amplitude-frequency characteristic of channel filters, a receiving of time matched signals with different frequencies. The analysis of efficiency of possible frequency ambiguity reduction ways is performed. The way of frequency ambiguity reduction in receiving of time matched signals with different frequencies is proposed.
Key words: ambiguity, matrix receiver, parasitic pass band, channels joint, amplitude-frequency characteristic slope, binary detector, selectivity, rough frequency determination, frequency determination ambiguity, even channels.
Введение
Широкое распространение в станциях радиотехнической разведки и станциях помех получила матричная схема построения приемного устройства, а также схемы, основанные на ней [1–5]. В матричном приемнике входной сигнал, попадая в первую ступень, разделяется по частоте на несколько каналов и преобразуется в единый для всех каналов первой ступени диапазон промежуточных частот (ПЧ). Далее сигнал в диапазоне ПЧ поступает на следующую ступень, где снова разделяется по частоте и переносится во второй диапазон ПЧ (единый для всех каналов второй ступени) и так далее до последней ступени. Каждый частотный канал во всех ступенях снабжается индикатором, указывающим номер сработавшего канала. По набору сработавших индикаторов можно определить частоту принятого сигнала. Основным преимуществом такого приемника по сравнению со сканирующей схемой является отсутствие пропуска цели, а по сравнению с многоканальной – меньшие массогабаритные характеристики при сохранении заданной точности определения частоты. Если верхняя граница диапазона ПЧ на выходе приемника достаточно низка, можно выполнить цифровую обработку сигнала, в результате которой не только повышается точность определения частоты, но и появляется возможность для более детального анализа сигнала. В современных радиоэлектронных средствах используются как широкополосные, так и узкополосные сигналы [6–8]. Одновременное применение множества радиоэлектронных средств обусловливает для средств радиотехнической разведки сложную радиоэлектронную обстановку. Несмотря на все преимущества матричного приемника, неоднозначность определения частоты затрудняет его использование в сложной радиоэлектронной обстановке [2].
В зависимости от причины возникновения неоднозначности определения частоты существуют различные способы ее снижения. Тем не менее, в открытой печати отсутствует систематизация неоднозначности различного рода, а также сравнительный анализ эффективности способов ее устранения, что и определило цель данной работы.
Неоднозначность определения частоты в приемнике матричного типа может быть вызвана следующими причинами:
- наличием паразитных полос пропускания канальных фильтров в полосе приема хотя бы одной из ступеней (далее – неоднозначность первого рода);
- малой крутизной АЧХ канальных фильтров (неоднозначность второго рода);
- одновременным приемом сигналов на двух и более частотах (неоднозначность третьего рода).
Неоднозначность первого рода
В силу технологичности изготовления
и малых габаритов канальные фильтры матричных приемников выполняются на
полосковой линии. Особенностью такого исполнения является наличие паразитных
полос пропускания, которые являются причиной возникновения неоднозначности
первого рода. Центральная частота второй (паразитной) полосы пропускания
фильтра в N
раз
превышает центральную частоту основной полосы (для типовых структур фильтров ![]() [9, 10]).
Эта проблема актуальна для широкополосных трактов, поскольку в них паразитные
полосы нижних по частоте каналов могут накладываться на основные полосы верхних
частотных каналов. Для исключения неоднозначности для каждого канального
фильтра должно выполняться приближенное неравенство
[9, 10]).
Эта проблема актуальна для широкополосных трактов, поскольку в них паразитные
полосы нижних по частоте каналов могут накладываться на основные полосы верхних
частотных каналов. Для исключения неоднозначности для каждого канального
фильтра должно выполняться приближенное неравенство ![]() где
где ![]() – центральная частота основной полосы
пропускания фильтра,
– центральная частота основной полосы
пропускания фильтра, ![]() – ширина полосы пропускания,
– ширина полосы пропускания,![]() – верхняя частотная граница полосы пропускания
рассматриваемой ступени. Однако при реализации широкополосных приемных
устройств неравенство может не выполняться.
– верхняя частотная граница полосы пропускания
рассматриваемой ступени. Однако при реализации широкополосных приемных
устройств неравенство может не выполняться.
Тогда неоднозначность практически полностью можно устранить путем подавления либо сдвига паразитной полосы пропускания. Однако при этом размеры топологии фильтра увеличиваются, а также изменяется АЧХ. Во многих случаях эффективными могут оказаться приведенные ниже методы, которые практически не увеличивают размеров топологии.
Для подавления паразитных полос фильтра используются резонаторы со скачком волнового сопротивления. За счет комбинации отрезков линий передач с разными волновыми сопротивлениями и электрическими длинами можно получить значительное подавление паразитных полос. Так согласно экспериментальным данным [11] для фильтра 5-го порядка с центральной частотой 3 ГГц и относительной полосой пропускания 17 % величина подавления второй полосы пропускания составила 65 дБ.
При возможности устранения
неоднозначности путем небольшого сдвига паразитной полосы пропускания,
целесообразно использование метода частичного удаления слоя экрана. Суть метода
заключается в том, что за счет создания «окон» в слое экрана под расположенными
с другой стороны платы микрополосковыми резонаторами уменьшается емкость
резонаторов на землю, и, соответственно, увеличивается коэффициент связи между
резонаторами. А это, в свою очередь, сдвигает полосу пропускания вниз по частоте.
Поскольку введение «окна» также расширяет полосу пропускания, упрощается реализация
широкополосных фильтров. Для узкополосных фильтров используется несколько менее
крупных «окон», расположенных под каждым из резонаторов. Такая структура
сдвигает полосу пропускания фильтра вниз, при этом щелевые резонаторы в слое
экрана создают резонанс на некратной частоте, существенно превышающей рабочую. Согласно
экспериментальным данным [12]
для фильтра 4-го порядка с центральной частотой 8 ГГц и полосой пропускания 520
МГц середина второй полосы пропускания была сдвинута с 16 ГГц до 19 ГГц, т.е.
приблизительно на 18 %. В общем случае сдвиг частоты является более эффективным,
т.к. по сравнению с подавлением он полностью исключает наличие паразитной
полосы с центральной частотой ![]() .
.
Таким образом, если паразитные полосы пропускания нижних по частоте канальных фильтров попадают в полосы пропускания верхних по частоте фильтров, то необходимо оценить величину возникающей полосы неоднозначности определения частоты. Если относительная ширина полосы составляет около 10 % и менее, необходимо сдвинуть паразитную полосу методом частичного удаления слоя экрана. Если ширина полосы превышает указанное значение, следует подавить паразитные полосы, попадающие в диапазон рабочих частот ступени, за счет использования резонаторов со скачком волнового сопротивления. Математический аппарат рассмотренных методов представлен в работе [11].
Неоднозначность второго рода
Неоднозначность второго рода возникает при попадании сильных сигналов в смежные области соседних каналов, т.к. полосовые фильтры не обладают идеально прямоугольной АЧХ. На рис. 1 сигнал находится в полосе канала K, но, учитывая неидеальность крутизны канальных фильтров, тот же сигнал попадает и в канал K+1. Если сигнал мощный, то срабатывают детекторы в обоих каналах, и сигналу ПЧ при попытке определения истинного значения частоты присваиваются два значения. Второе, ложное, значение показано пунктирной линией в канале K+1. Если частота сигнала в следующей ступени снова попадает на стык каналов, то количество определяемых приемным устройством частот составит четыре, т. е. неоднозначность увеличится в два раза. Впрочем, если сигнал до последней ступени не попадет на стыки, неоднозначность может и не увеличиться. Тогда после прохождения сигналом всех ступеней приемника по сработавшим индикаторам определяются два значения частоты. Одно из них является ложным.
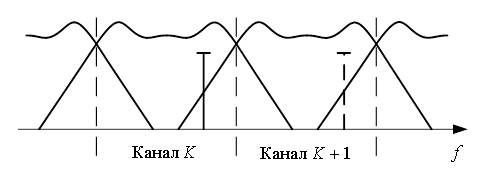
Рис. 1. Попадание сильного сигнала в смежную область соседних каналов
Для уменьшения неоднозначности второго рода можно использовать пороговый бинарный обнаружитель на основе фазового детектора либо разделение каналов ПЧ на группы с раздельной обработкой их выходного сигнала.
Традиционно
в каналах матричных приемных устройств используются пороговые бинарные
обнаружители, содержащие последовательно соединенные полосовой фильтр,
амплитудный детектор и пороговое устройство [2,
13].
Пороговый бинарный обнаружитель на основе фазового детектора (рис. 2, а)
снижает неоднозначность определения частоты на стыках каналов [14].
Достигается это за счет использования фазового детектора ФД, на один вход
которого через канальный полосовой фильтр с граничными частотами ![]() подается сигнал в заданном диапазоне
частот канала, а на второй – тот же сигнал, но пропущенный через два последовательно
соединенных узкополосных режекторных фильтра. Сигнал с выхода детектора
поступает на пороговое устройство ПУ, формирующее признак наличия сигнала (ПНС)
в канале. Центральные частоты
подается сигнал в заданном диапазоне
частот канала, а на второй – тот же сигнал, но пропущенный через два последовательно
соединенных узкополосных режекторных фильтра. Сигнал с выхода детектора
поступает на пороговое устройство ПУ, формирующее признак наличия сигнала (ПНС)
в канале. Центральные частоты ![]() полос заграждения фильтров
выбраны на границах канала, чем обеспечивается необходимый фазовый сдвиг в этих
областях. Напряжение на выходе ФД определятся выражением [15]:
полос заграждения фильтров
выбраны на границах канала, чем обеспечивается необходимый фазовый сдвиг в этих
областях. Напряжение на выходе ФД определятся выражением [15]:
![]() где
где ![]() – крутизна
фазовых характеристик ФД,
– крутизна
фазовых характеристик ФД, ![]() – напряжение сигнала
на выходе опорного плеча, соединенного с выходом полосового фильтра,
– напряжение сигнала
на выходе опорного плеча, соединенного с выходом полосового фильтра, ![]() – напряжение сигнала на выходе
измерительного плеча, соединенного с выходом режекторного фильтра,
– напряжение сигнала на выходе
измерительного плеча, соединенного с выходом режекторного фильтра, ![]() – фазовые сдвиги сигнала на выходах измерительного
и опорного плеч соответственно. В результате сложения АЧХ полосового и
режекторных фильтров частотная зависимость напряжения на выходе детектора имеет
вид, показанный на рис. 2, б. Как видно, при уходе частоты за границы
канала напряжение меняет свой знак на отрицательный.
– фазовые сдвиги сигнала на выходах измерительного
и опорного плеч соответственно. В результате сложения АЧХ полосового и
режекторных фильтров частотная зависимость напряжения на выходе детектора имеет
вид, показанный на рис. 2, б. Как видно, при уходе частоты за границы
канала напряжение меняет свой знак на отрицательный.
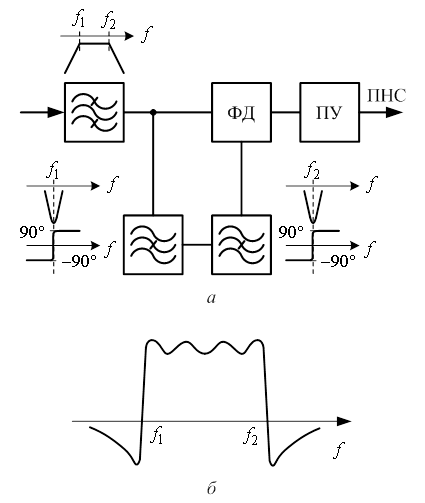
Рис. 2. Пороговый бинарный обнаружитель на основе фазового детектора:
а – схема; б – частотная зависимость выходного напряжения
Недостатками использования такого обнаружителя являются усложнение схемы и снижение надежности приемника в целом из-за использования дополнительных активных элементов (фазовых детекторов). Также стоит отметить необходимость наличия устройства обработки сигналов обнаружителей.
Ширина относительной полосы частот, в которой не исключается неоднозначность, для каждого канала определяется относительными полосами режекторных фильтров [14]:
где ![]() – добротность.
– добротность.
Если динамический диапазон входного сигнала принять равным 15 дБ, а полосу канального фильтра задать по уровню минус 5 дБ, то в полосах режекторных фильтров по уровню минус 20 дБ сохранится неоднозначность. При использовании в качестве узкополосных режекторных фильтров диэлектрических резонаторов, для которых типичное значение добротности на частоте 10 ГГц составляет около 104 [16, 17], ширина относительной полосы частот, в которой возможна неоднозначность определения частоты, составит:

Соответственно, на частоте 10 ГГц ширина полосы составит 50 МГц. Целесообразно сравнить это значение с шириной полосы неоднозначности при другом способе ее снижения.
Другим
способом снижения неоднозначности второго рода является разделение каналов ПЧ
на группы, так, чтобы каналы одной группы не являлись соседними. Сигналы с
выходов каналов различных групп суммируются и обрабатываются раздельно. Частным
случаем такого подхода является разделение каналов на две группы: четные и
нечетные, что, как правило, и используется на практике [18–20].
Двух групп достаточно для реализации принципа, а дальнейшее увеличение их
количества для решения данной задачи экономически нецелесообразно и может
потребоваться только при решении дополнительных задач. В результате разделения
каналов ПЧ при попадании сильного сигнала в смежную область соседних каналов
срабатывают два детектора, но в канале K
определяется
мощный сигнал, а в канале K+1
он отсутствует (см. рис. 1). Такая ситуация обрабатывается программно, при этом
срабатывание канала K+1
признается ложным. Если ступеней несколько, и сигнал с выхода какой-либо i-ой
ступени отдельно не подается на обработку, то в каждой ступени должна быть
схема обработки сигналов сумматоров. Такая схема может выглядеть, например,
так, как показано на рис. 3, и включать в себя детекторы, устройство сравнения и
индикатор нечетности/четности ![]() сработавшего канала.
Выходы сумматоров
сработавшего канала.
Выходы сумматоров ![]() подключены ко входам оконечного
сумматора
подключены ко входам оконечного
сумматора ![]() , с выхода которого сигнал поступает на
следующую ступень, либо, если ступень является последней, на устройство обработки.
Возможен также вариант построения последней ступени, при котором на обработку
поступают сигналы с сумматоров
, с выхода которого сигнал поступает на
следующую ступень, либо, если ступень является последней, на устройство обработки.
Возможен также вариант построения последней ступени, при котором на обработку
поступают сигналы с сумматоров ![]() . Тогда схема обработки
сигналов сумматоров и выходной сумматор
. Тогда схема обработки
сигналов сумматоров и выходной сумматор ![]() , соответственно, не требуются,
а устройство обработки усложняется, дополняясь вторым каналом. Но при этом
вдвое расширяется диапазон одновременно обрабатываемого сигнала.
, соответственно, не требуются,
а устройство обработки усложняется, дополняясь вторым каналом. Но при этом
вдвое расширяется диапазон одновременно обрабатываемого сигнала.
Разделение каналов более чем на две группы, о котором говорилось выше, может понадобиться, например, при необходимости обработки широкополосных сигналов, спектр которых попадает в три и более каналов одной ступени. Так, для канала с типовой для устройств цифровой обработки информации станций радиотехнической разведки шириной канала 500 МГц [21] сигнал с шириной спектра более 1 ГГц [6–8] перекроет три канала. В этом случае спектр сигнала в диапазоне ПЧ будет наложен сам на себя, и сигнал будет обработан некорректно. Решением проблемы является увеличение количества сумматоров ПЧ.
Недостатком разделения каналов ПЧ на четные и нечетные является усложнение схемы за счет введения сумматоров и схем обработки их сигналов в каждой ступени. И так же, как и при использовании обнаружителей, требуется наличие устройства обработки, функцией которого в данном случае является определение частоты принятого сигнала по набору сработавших индикаторов.
Диапазон частот, в котором сохраняется неоднозначность определения частоты, находится, исходя из следующих соображений.
Считаем, что в отсутствие сигнала все каналы принудительно закрыты и открываются при превышении входным сигналом заданного порога. При появлении сигнала на стыке каналов (см. рис. 1) срабатывают каналы K, K+1.
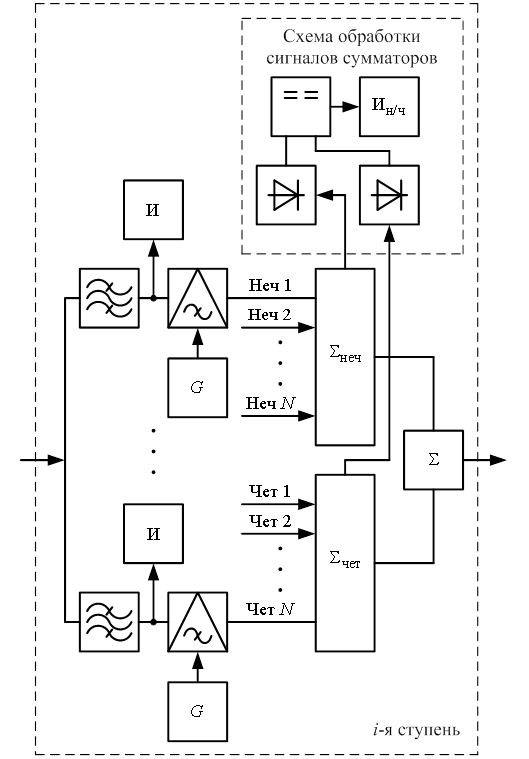
Рис. 3. Ступень матричного приемника, дополненная сумматорами нечетных и
четных каналов и схемой обработки сигналов сумматоров
При этом мощность сигнала канала K на входе детектора схемы обработки сигналов сумматоров:
 (1)
(1)
где ![]() – спектральная плотность мощности
сигнала,
– спектральная плотность мощности
сигнала, ![]() – частотный коэффициент передачи канала K,
включающий в себя коэффициенты передачи канального фильтра и смесителя, а также
одного из сумматоров (
– частотный коэффициент передачи канала K,
включающий в себя коэффициенты передачи канального фильтра и смесителя, а также
одного из сумматоров (![]() ), к которому подключен канал.
), к которому подключен канал.
Здесь мы пренебрегаем мощностью, ответвляемой в индикатор канала. Соответственно, мощность сигнала на входе детектора канала K+1:
 (2)
(2)
где ![]() – частотный коэффициент передачи канала K+1.
– частотный коэффициент передачи канала K+1.
Из
выражений (1), (2) следует, что мощность сигнала на входе детектора зависит
только от коэффициента передачи канала. Для выявления ложного срабатывания
канала K+1
мощность ![]() на входе детектора схемы обработки
сигналов сумматоров (см. рис. 3) должна быть меньше мощности
на входе детектора схемы обработки
сигналов сумматоров (см. рис. 3) должна быть меньше мощности ![]() на величину не менее, чем разрешающая
способность аналого-цифрового преобразователя (АЦП)
на величину не менее, чем разрешающая
способность аналого-цифрового преобразователя (АЦП) ![]() (приведенная
ко входу детектора):
(приведенная
ко входу детектора):
![]()
где
 ,
,
![]() –
максимальная мощность на входе детектора,
–
максимальная мощность на входе детектора, ![]() –
минимальная мощность на входе детектора, N
– разрядность АЦП.
–
минимальная мощность на входе детектора, N
– разрядность АЦП.
При
использовании в качестве логарифмического детектора, например, микросхемы ADL5513
числитель в выражении для разрешающей способности (динамический диапазон
сигнала на входе ADL5513) примет
значение 70 дБ [22].
А при выборе 12-разрядного АЦП разрешающая способность будет равна: ![]()
При крутизне ската АЧХ 0,15 дБ/МГц (что соответствует затуханию 30 дБ при отстройке на 200 МГц) неоднозначность сохранится в полосе всего 113 кГц.
Как видно, рассмотренные способы снижения неоднозначности определения частоты второго рода имеют одинаковый недостаток – сложность исполнения, а точностные характеристики во многом зависят от применяемой электронной компонентной базы: для первого способа важна высокая добротность режекторных фильтров, а для второго – разрядность АЦП и динамический диапазон детектора. В рассмотренных выше численных примерах использования обоих способов были выбраны типовые значения различных параметров. При этом при использовании второго способа полоса, в которой возможна неоднозначность, оказалась у́же более чем на два порядка. Однако первый способ гораздо проще реализуем на практике. Очевидно также, что полностью исключить неоднозначность не позволяют оба способа.
Неоднозначность третьего рода
При одновременном приеме сигналов на двух и более частотах возникает неоднозначность определения частоты другого рода. Она не связана с избирательностью канальных фильтров. В данном случае влияние оказывает сама структура матричного приемника.
Данную
неоднозначность невозможно устранить без использования специальных средств и,
что хуже, она растет с увеличением числа используемых ступеней. При попадании
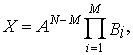
на вход N-ступенчатого
матричного приемника A
разночастотных узкополосных сигналов (т.е. таких, что спектр сигнала полностью
попадает в полосу канала последней ступени) максимальное количество определяемых
частот X
составит
![]() .
.
Возникновение неоднозначности определения частоты третьего рода возможно при создании помех матричным приемникам, а также в условиях сложной сигнальной обстановки.
На
рис. 4 показан пример роста неоднозначности при приеме двух разночастотных
сигналов в матричном приемнике, состоящем из трех ступеней. Ширина канала
первой ступени обозначена ![]() , второй ступени –
, второй ступени – ![]() ,
третьей ступени –
,
третьей ступени – ![]() . После прохождения каждой ступени частоты
принимаемых сигналов последовательно уточняются.
. После прохождения каждой ступени частоты
принимаемых сигналов последовательно уточняются.
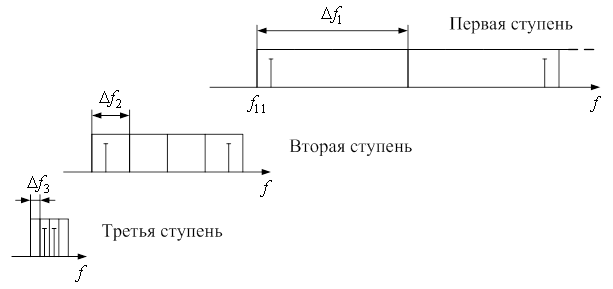
Рис. 4. Пример роста неоднозначности определения частоты
при приеме двух разночастотных сигналов
После
первой ступени частоты наблюдаемых сигналов ![]()
![]() находятся в диапазонах:
находятся в диапазонах:
![]()
![]()
Полосы каналов первой ступени переносятся в единый диапазон ПЧ, после чего во второй ступени он разделяется на частотные каналы, и частоты занимают диапазоны:
![]()
![]()
![]()
![]()
И, наконец, после третьей ступени:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Окончательно частоты сигналов определяются как середины диапазонов, либо, если последняя ступень имеет выход ПЧ, выполняется обработка сигнала, в результате которой более точно определяют частоту сигнала для каждого из полученных диапазонов.
Количество определенных частот может быть меньше, если в какой-либо ступени хотя бы два сигнала попадают в один канал и не различаются этой ступенью, соответственно неоднозначность уменьшается. В этом случае количество частот, обнаруженных приемным устройством, определяется как:
где M
– количество ступеней, в которых сигналы не различаются, B
– количество сигналов, определяемых в i-й
ступени ![]()
Неоднозначность может отсутствовать совсем, если частоты сигналов мало удалены друг от друга, и каждый сигнал попадает в один канал последней ступени. Проиллюстрируем это утверждение примером.
Предположим, на вход приемника попадают Y равноотстоящих друг от друга на частотной оси узкополосных сигналов, а значение между их центральными частотами равно ширине полосы пропускания канала последней ступени. Последняя ступень имеет также Y каналов, т.е. сигналы попадают в каналы последней ступени, причем каждый сигнал попадает в центр канала. Тогда получается, что, сколько бы ни было ступеней, в каждой (кроме последней) сигналы попадают в один канал, и неоднозначность в них не возникает. Неоднозначность отсутствует независимо от построения последней ступени: и если последняя ступень имеет общий выход ПЧ, и если в ней не выполняется преобразование частоты, а присутствуют только канальные фильтры и детекторы. Следовательно, чем меньше удалены друг от друга частоты сигналов, тем меньше неоднозначность, конечно, при условии, что они различаются последней ступенью.
В работе [23] предложено основанное на матричном принципе построение приемника, в котором неоднозначность третьего рода устраняется только для первой ступени и только при приеме двух сигналов. Однако описанный там принцип можно распространить на все ступени и на большее количество сигналов. В [23] первая ступень матричного приемного устройства дополнена функциональным узлом, позволяющим при выявлении одновременного попадания сигналов в два канала первой ступени исключить определение ложных значений частоты за счет задержки сигнала на выходе одного частотного канала первой ступени относительно другого. Сигнал, проходящий без задержки, обрабатывается первым, а задержанный сигнал – вторым. Схема содержит комбинационное логическое устройство, которое при необходимости подключает в каждом канале линию задержки с фиксированной величиной задержки. Данное устройство можно усовершенствовать, дополнив вторую и последующие ступени аналогичными узлами и изменив логику работы так, чтобы обрабатывалась ситуация с множеством сигналов. Тогда неоднозначность определения частоты будет полностью устранена. Однако такое решение требует усложнения схемы, а, кроме того, появляется новая проблема – вероятность пропуска сигнала за время работы линии задержки.
Поэтому
для исключения неоднозначности третьего рода предлагается в каждой ступени
матричного приемника дополнительно использовать устройство определения частоты,
принцип действия которого основан на использовании цепей с ярко выраженной частотной
зависимостью коэффициента передачи. Схема может быть выполнена, например, на
основе фильтров с пологим скатом АЧХ. Амплитуда сигнала, попадающего на скат
АЧХ фильтра, на выходе схемы зависит от частоты. Возможный пример реализации устройства
определения частоты представлен на рис. 5. Сигнал со входа ступени поступает на
вход соответствующего устройства определения частоты, в котором, пройдя через
усилитель-ограничитель, разветвляется на каналы. Каждый канал содержит последовательно
включенные полосовой фильтр, формирующий полосу пропускания канала ![]() фильтр, имеющий наклон АЧХ в полосе
фильтр, имеющий наклон АЧХ в полосе ![]() и детектор. Количество и полосы каналов устройства
определения частоты соответствуют количеству и полосам каналов ступени, к
которой данная схема подключена. С выходов каналов сигнал подается на
устройство обработки (УО), включающее в себя АЦП и выполняющее измерение
амплитуды сигнала в каждом канале, соотнесение этой амплитуды с таблицей частот
для каждого канала и выдающее измеренное с заданной точностью значение частоты
сигнала.
и детектор. Количество и полосы каналов устройства
определения частоты соответствуют количеству и полосам каналов ступени, к
которой данная схема подключена. С выходов каналов сигнал подается на
устройство обработки (УО), включающее в себя АЦП и выполняющее измерение
амплитуды сигнала в каждом канале, соотнесение этой амплитуды с таблицей частот
для каждого канала и выдающее измеренное с заданной точностью значение частоты
сигнала.
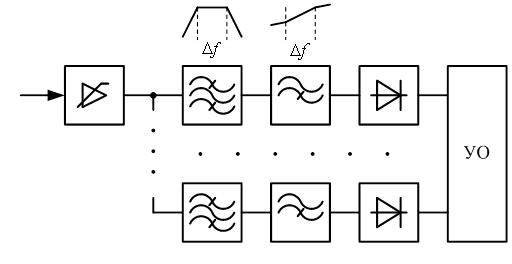
Рис. 5. Устройство определения частоты
Усилитель-ограничитель в данной схеме устраняет зависимость сигнала от амплитуды для того, чтобы на входы каналов приходили сигналы одного уровня. Далее в каждом канале в зависимости от частоты сигнал приобретает соответствующую амплитуду, детектируется и обрабатывается в УО.
Предложенное устройство при подключении его к любой ступени устраняет неоднозначность измерения в следующей ступени. Очевидно, что для этого разрешающая способность устройства по частоте должна быть не менее ширины полосы пропускания канала следующей ступени. Однако если возможно получить разрешающую способность по частоте, равную или превышающую ширину канала последней ступени, то достаточно использовать схему только в первой ступени. Поэтому в зависимости от достигаемой при реализации разрешающей способности можно использовать одну схему либо несколько, но не в каждой ступени (например, через ступень).
Преимущество использования устройства определения частоты, по сравнению с предыдущим решением, заключается в отсутствии задержки сигнала и, как следствие, исключении его пропуска. Кроме того, схема не усложняется при увеличении количества одновременно различаемых сигналов. Недостатком данного способа исключения неоднозначности третьего рода является необходимость использования широкополосного усилителя-ограничителя, стоимость которого, учитывая применение схемы в диапазоне СВЧ, в разы превышает стоимость цифрового функционального узла, используемого в предыдущем решении.
Рассмотренные в данной работе причины возникновения неоднозначности определения частоты в матричном приемнике позволяют оценить величину неоднозначности еще на стадии разработки. А описанные способы снижения неоднозначности могут быть использованы при проектировании матричных приемных устройств в зависимости от предъявляемых к ним требований.
Литература
3 Куприянов А. И., Сахаров А. В. Радиоэлектронные системы в информационном конфликте. М.: Вуз. книга, 2003. 528 с.
4 Цветнов В. В., Демин В. П., Куприянов А. И. Радиоэлектронная борьба: радиоразведка и радиопротиводействие. М.: Изд-во МАИ, 1998. 248 с.
5 Подстригаев А. С., Беззуб А. И. Широкополосное приемное устройство станции радиоэлектронной борьбы // Изв. вузов России. Радиоэлектроника. 2014. Вып. 4. С. 37 – 44.
6 Зарубежные радиоэлектронные средства / Под ред. Ю. М. Перунова. В 4 кн. Кн. 1: Радиолокационные системы. М.: Радиотехника, 2010. 336 с.
7 Купряшкин И. Ф., Лихачев В. П. Космическая радиолокационная съемка земной поверхности в условиях помех: монография. Воронеж: Издательско-полиграфический центр «Научная книга», 2014. 460 с.
8 Щербак Н. Сверхширокополосная радиолокация. Что это такое // Электроника: НТБ. 2002. Вып. 3. С. 38 – 46.
10 Hong J.-S., Lancaster M. J. Microstrip Filters for RF/Microwave Applications. John Wiley & Sons, 2001. 473 p.
11 Колмакова И. В. Микрополосковые узкополосные СВЧ фильтры с подавлением паразитных полос: дис. … канд. техн. наук. СПб, 2013. 157 с.
12 Колмакова И. В. Планарные полосно-пропускающие фильтры без паразитных полос пропускания / И. В. Колмакова, И. Б. Вендик // Всероссийская конференция «Микроэлектроника СВЧ». – СПб.: СПбГЭТУ, 2012. – Июнь 4-7. – С. 226 – 230. URL: http://mwelectronics.ru/2012/Poster/C52_I.V.%20Kolmakova_Planarny%60e%20polosno-propuskayuschie.pdf
13 Tsui J. B. Y. Microwave Receivers with Electronic Warfare Applications. John Wiley & Sons, 1986. 460 p.
14 Пат. 2185638 Российская Федерация, МПК7 G 01 S 7/292. Пороговый бинарный обнаружитель / Скрипкин А. А., Олейникова Л. В.; патентообладатель Государственное конструкторское бюро аппаратно-программных систем "Связь" Всероссийского НИИ "Градиент". – № 2000117893/09; заявл. 05.07.2000; опубл. 20.07.2002. 11 с.
15 Гоноровский И. С. Радиотехнические цепи и сигналы. Учеб. для вузов. М.: Сов. радио, 1977. 608 с.
16 Ченакин А. Фазовые шумы в СВЧ-генераторах. Методы решения проблемы // Электроника НТБ, 2011. № 4. С. 52 – 61.
17 Каталог продукции ООО «Керамика» [Электронный ресурс]. URL: http://ceramics.sp.ru/production/DR.pdf.
18 Wiegand R. J. Radar Electronic Countermeasures System Design. Artech House, 1991. 288 p.
19 Пат. 2284545 Российская Федерация, МПК G 01 S 7/40, G 01 S 11/00. Корабельная система радиотехнического контроля / Байлов В. С., Гришков А. Ф., Дорух И. Г., Чекрыгин А. Э.; патентообладатель ФГУП «ТНИИС». – № 2004119344/09; заявл. 24.06.2004; опубл. 10.01.2006. 11 с.
20 Пат. 2237907 Российская Федерация, МПК7 G 01 S 7/38, H 04 K 3/00. Корабельный комплекс радиоэлектронного противодействия / Борисов А. А., Борисов А. А., Брыкалов П. А., Примак В. П., Чубаров А. В., Шевченко В. И.; патентообладатель ДГУП «Научно-технический центр «Бригантина». – № 2002132544/09; заявл. 03.12.2002; опубл. 10.10.2004. 13 с.
21 Радиоэлектронная борьба. Цифровое запоминание и воспроизведение радиосигналов и электромагнитных волн / В. Д. Добыкин [и др.]; под общ. ред. А. И. Куприянова. М.: Вуз. книга, 2009. 360 с.
22 Тех. описание микросхемы ADL5513 [Электронный ресурс]. URL: http://www.analog.com/static/imported-files/data_sheets/ADL5513.pdf
23 Пат. 2422845 Российская Федерация, МПК G 01 S 7/285. Матричный приемник / Анохин В. Д., Анохин Е. В., Кильдюшевская В. Г., Симохаммед Фаузи; патентообладатель ФГОУ ВПО «Военный авиационный инженерный университет» (г. Воронеж) МО РФ. – № 2009131254/09; заявл. 17.08.2009; опубл. 27.02.2011, Бюл. № 18. 11 с.