УДК 004.415.2.041
Распределенная микроконтроллерная система акустической локации
А. В. Львов1, М. Н. Агапов2, А. И. Тищенко3
1энергетический факультет АГТУ имени И.И.Ползунова, кафедра электротехники
2 факультет информационных технологий АГТУ имени И.И.Ползунова, кафедра САПР
3 энергетический факультет АГТУ имени Ползунова, кафедра общей электротехники
Получена 11 ноября 2010 г.
Аннотация. В статье
изучена возможность создания системы бесконтактного определения координат
источника звука. Предложена функциональная схема прибора и метод вычисления
координат. На практике проверена работоспособность с помощью экспериментального
стенда. Опытным путем исследовалось влияние количества датчиков на точность
результатов определения координат.
Ключевые слова: координата, источник звука, микрофон.
Введение
Бесконтактное определение координат реальных объектов в пространстве является распространенной задачей. Более простыми являются контактные способы определения координат, когда задача сводится к измерению расстояний от базовых точек вдоль контактирующих с объектом приспособлений. Среди бесконтактных методов преобладают оптические и электромагнитные. Оптические методы условно можно разделить на две группы: использующие распознавание объекта на многопиксельных изображениях и методы без использования изображений. В первом случае необходимо обрабатывать изображение и уметь выделять на изображении интересующий объект. Во втором случае, как и для ультразвуковых методов определения координат, местоположение и поведение объекта обычно считаются известными в том смысле, что диапазон изменения координат объекта соизмерим с его размерами.
Оптические методы по разным причинам применимы не всегда и не везде. Мы будем рассматривать возможность применения именно акустических измерений для определения координат. Будем считать, что размеры объекта существенно (на несколько порядков) меньше той области пространства, где объект может находиться. Будем считать, что объект является источником звука, который может регистрироваться микрофонами.
Звуковая локация бывает активная и пассивная [1]. В нашем случае мы имеем дело с пассивной локацией, так как объект сам является источником звуковых волн. Будем считать, что микрофоны закреплены в базовых точках с известными координатами, и излучаемый объектом звук может регистрироваться хотя бы частью микрофонов. В зависимости от взаимного положения объекта и микрофонов, излучаемый звуковой сигнал попадает на разные микрофоны с разными временными задержками и разными амплитудами (разной мощностью). Рассмотрим задачу определения координат объекта на основании полученных микрофонами звуковых сигналов (рис.1).
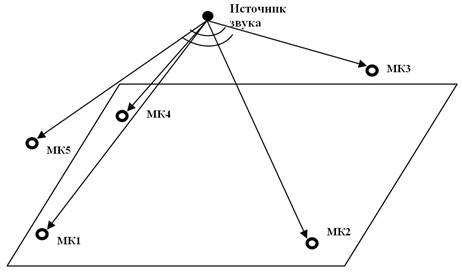
Рис.1. Пример возможного расположения источника звука и микрофонов.
Данная задача очень похожа на триангуляционную, которая для трехмерного случая сводится к системе из 3-х уравнений следующего вида:
![]()
Число уравнений строго соответствует числу переменных. Главным отличием предлагаемого нами метода является то, что расстояния от объекта до отдельных микрофонов в нашем случае неизвестны. Дополнительным отличием является возможность использования произвольного числа микрофонов для определения координат.
Измеряемой величиной является разность расстояний от объекта до пары микрофонов. В случае импульсного излучения звука объектом может фиксироваться время прихода импульса на разные микрофоны, в случае непрерывного излучения некогерентного звука могут использоваться корреляционные методы определения задержки сигналов. Если для пары микрофонов с известными координатами известна разность хода сигнала между микрофонами, то можно утверждать, что объект лежит на поверхности гиперболоида, в фокусах которого размещены микрофоны. Если сигнал принимается тремя микрофонами, то объект находится на пересечении двух гиперболоидов, обычно таким пересечением является пространственный эллипс. При добавлении еще одного микрофона область размещения объекта должна сводиться к одной или двум точкам (пересечение эллипса и гиперболоида), при наличии сигнала на пяти микрофонах положение объекта может быть определено однозначно.
Обычной проблемой при измерениях являются шумы, помехи при низком уровне полезного сигнала, из-за этого задача определения пересечений гиперболоидов и определения координат объекта может стать неустойчивой. Поэтому дополнительным требованием к разрабатываемому методу определения координат является возможность использования в расчетах всех микрофонов, принимающих различимый сигнал, для повышения точности определения координат. Это обстоятельство также определяет новизну, поскольку для стандартных триангуляционных методов количество известных и искомых величин жестко связано, и избыточные исходные данные не влияют на точность результата.
Тестовый прибор и методика вычисления координат
Поставленной задачей является разработка пробного образца прибора для определения координат излучающих звук объектов. С этой целью разрабатывались модель процесса измерений, методы определения координат, а также измерительная система на базе микроконтроллеров.
Рассмотрим подробней процесс определения координат с математической точки зрения.
Введем следующие обозначения:
I={x0 ; y0; z0} – координаты источника звука (ИЗ).
Mi={xi ; yi ; zi} – координаты одного из микрофонов, где i=1..n.
Тогда расстояние(Ri) от источника звука до i-го микрофона можно найти по следующей формуле [2]:
![]()
Время распространения звука(![]() )
от ИЗ до микрофона с номером i определяется скоростью
звука (
)
от ИЗ до микрофона с номером i определяется скоростью
звука (![]() ):
):

Разность хода звука (tij) для пары микрофонов:

Для каждой пары микрофонов должно соблюдаться соотношение:
![]()
Отклонение от точного равенства нулю определяется погрешностью измерений, знак отклонения может быть как положительным, так и отрицательным. Для всех попарно сработавших микрофонов можно записать эти соотношения в виде суммы(Ф1), которая стремится к нулю при отсутствии погрешности измерений:
Обычно в подобных расчетах используется знакопостоянный функционал(Ф2) оценки суммарной погрешности следующего вида:
Функционал
![]() зависит от координат
источника звука (x0, y0, z0). При
известных координатах источника звука и отсутствии погрешности измерений
зависит от координат
источника звука (x0, y0, z0). При
известных координатах источника звука и отсутствии погрешности измерений ![]() обращается в ноль. Если координаты
источника звука неизвестны, их надо тем или иным способом подобрать, критерием
правильности подбора координат является минимизация функционала
обращается в ноль. Если координаты
источника звука неизвестны, их надо тем или иным способом подобрать, критерием
правильности подбора координат является минимизация функционала ![]() . В точке минимума частные
производные
. В точке минимума частные
производные ![]() по
x0, y0, z0 будут равны нулю:
по
x0, y0, z0 будут равны нулю:
Полученная система из трех уравнений является нелинейной, и не удастся найти решение методом, аналогичным методу Гаусса. Для определения решения можно воспользоваться итеративным методом поиска минимума, например, методом последовательных приближений, спуска, градиентным методом.
Процесс нахождения
координат сводится к нахождению минимума ![]() .
.
В нашем случае на вход программы для расчета
координат поступают числа, соответствующие задержкам срабатывания микрофонов (![]() ) и известные координаты восьми
микрофонов (x1..x8, y1..y8, z1..z8).
Далее для следующего функционала находятся координаты минимума (x0,
y0, z0):
) и известные координаты восьми
микрофонов (x1..x8, y1..y8, z1..z8).
Далее для следующего функционала находятся координаты минимума (x0,
y0, z0): 
Для реализации вышеизложенных математических вычислений потребуется вычислительная система, описанная далее. В качестве требований к разрабатываемому устройству были выделены простота реализации, удобство использования, а также доступность для широкого применения в заданных условиях измерений. Выполнить эти требования в большей степени стало возможно за счет прогресса в параметрах современных микроконтроллеров, которые являются сейчас дешевой и доступной вычислительной системой. На рис.2 изображена функциональная схема, позволяющая в общих чертах понять принципы работы прибора.
В качестве акустических датчиков могут выступать
обычные
микрофоны (мк). Микрофоны преобразуют акустический сигнал в электрический [3],
который поступает в блок предварительного усилителя (ПУ). Затем усиленный до
необходимого уровня сигнал подается в аналого-цифровой преобразователь (АЦП),
встроенный в микроконтроллер (МК). С помощью программы в микроконтроллере
производится первоначальная обработка полученных сигналов, и промежуточные
результаты передаются с помощью модуля USART по
последовательному интерфейсу в персональный компьютер, где в настоящее время
производится расчет координат источника звука. С поставленными задачами вполне
достойно справляется недорогой микроконтроллер
PIC16F877 от компании Microchip
[4]. В дальнейшем планируется всю обработку выполнять в
производительном микроконтроллере.
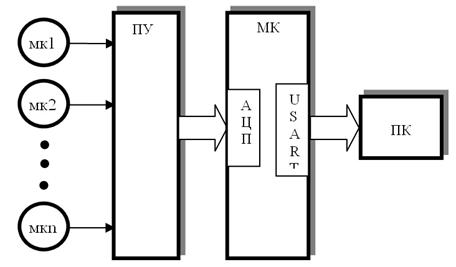
Рис.2. Функциональная схема системы определения координат источника звука.
Рассмотрим процедуру вычисления координат для импульсного источника звука по данным микрофонов. Первоначальная обработка результатов производится в микроконтроллере. Поступающий сигнал в АЦП со всех микрофонов с заданной частотой преобразуется в цифровую форму, проверяется, не превышен ли заданный пороговый уровень мощности сигнала. Если пороговый уровень превышен одним из микрофонов, то этот момент времени считается стартовой точкой отсчета по времени, и запускается встроенный в микроконтроллер таймер. Затем ожидается превышение порогового уровня каждым из оставшихся микрофонов. При этом будут зафиксированы несколько значений таймера, соответствующие каждому из микрофонов. Эти значения представляют собой задержки между приходом звуковой волны до разных микрофонов. Зная координаты микрофонов и величину задержек, можно приступать к вычислению положения источника звука. Поскольку такие расчеты являются достаточно громоздкими для микроконтроллера, то сейчас этими вычислениями занимается персональный компьютер (ПК) c помощью специализированных математических программ.
Рассмотрим процесс вычисления координат, этими вычислениями занимается специально разработанная программа. Пространственное положение микрофонов считается известным и задается вручную. На вход программы от микроконтроллера поступают временные задержки прихода сигнала к отдельным микрофонам, известен также номер ближайшего к объекту микрофона.
Тестовая установка и экспериментальные результаты
Проверка работоспособности системы и исследование влияния различных факторов на точность определения координат производились в лабораторных условиях. Тестовый экземпляр прибора способен определять координаты точечного источника звука на плоскости.
В состав тестовой установки входят:
1. Источник питания ±12 В (ИП)
2. Система первичной обработки данных (СПОД)
3. Восемь микрофонов (МК1 - МК8)
4. Размеченная координатная плоскость 100 x 100см (КП)
5. Персональный компьютер (ПК)
6. Соединительные кабели
7. Источник звука (ИЗ)
Центральное место во всей системе занимает система первичной обработки данных (СПОД). Этот блок с помощью микроконтроллера занимается непрерывным опросом сигналов со всех микрофонов, отслеживает момент срабатывания, в результате чего вычисляются промежуточные результаты, которые сразу же пересылаются в ПК для дальнейшей обработки. В свою очередь ПК с помощью специальной программы на основе полученных результатов произведет расчеты координат местоположения источника звука.
В качестве приемников звука нами использовались восемь однотипных микрофонов типа МКЭ-3, которые располагаются на координатной плоскости.
Измерения производились в следующем порядке:
1. Микрофоны размещаются на КП и фиксируются их координаты.
2. ИЗ размещается на КП и его координаты фиксируются (эти координаты сравниваются с вычисленными).
3. СПОД переводится в режим измерения.
4. ИЗ подает через паузу 10 импульсных звуковых сигналов.
5. СПОД отключается.
6. Производится вычисление координат ИЗ компьютером и сопоставляется с фактическим размещением ИЗ.
Исследовалась зависимость точности определения координат от количества задействованных микрофонов (5МК, 6 МК, 7 МК, 8 МК), их взаимного расположения и условий измерения:
- ИЗ находится в случайном месте (опыт №1, 2);
- ИЗ и два микрофона находятся на одной прямой (опыт №3, 4);
- ИЗ находится на равном расстоянии от двух микрофонов (опыт №5, 6);
В таблице 1 приведены некоторые образцы полученных экспериментальных данных. В последнем столбце указана абсолютная погрешность для случая с включением всех восьми микрофонов, погрешность указана для каждой из координат.
Таблица 1. Результаты определения координат источника звука.
|
№ опыта |
Координаты в см |
Погрешность определения координат, см |
|||
|
ИЗ, см |
6 МК, см |
7 МК, см |
8МК, см |
||
|
1 |
(50 ; 48) |
(54 ; 50) |
(57 ; 48) |
(55 ; 48) |
5 , 0 |
|
2 |
(30 ; 20) |
(31 ; 23) |
(31 ; 23) |
(30 ; 22) |
0 , 2 |
|
3 |
(30 ; 40) |
(25 ; 41) |
(24 ; 41) |
(26 ; 39) |
4 , 1 |
|
4 |
(10 ; 45) |
(25 ; 50) |
(14 ; 49) |
(12 ; 50) |
2 , 5 |
|
5 |
(34 ; 36) |
(31 ; 41) |
(36 ; 33) |
(34 ; 34) |
0 , 2 |
|
6 |
(31 ; 50) |
(29 ; 45) |
(29 ; 46) |
(29 ; 46) |
2 , 4 |
Основываясь на случайно выбранных результатах, можно сказать, что варианты с 6-ю и 7-ю микрофонами вполне приемлемы, для определения местоположения источника звука с невысокой точность. На этом фоне случай с использованием 8-ми микрофонов смотрится несколько стабильней в плане погрешностей. Если же оценивать все проведенные измерения в целом, то можно сделать похожие выводы с той разницей что, в опытах с 6-ю и 7-ю микрофонами периодически попадаются абсолютно неприемлемые по точности результаты. Замеры приходится повторять заново. С 8-ю микрофонами, как показала практика, такие ситуации возникают значительно реже. Соответственно при измерениях на плоскости разумно использовать не менее 8-ми микрофонов.
Что касается остальных факторов, то их видимое влияние на точность измерений замечено не было.
Заключение
В результате проделанной работы:
- разработан метод, позволяющий определять координаты ИЗ;
- разработана система определения координат
- успешно выполнено компьютерное моделирование процесса определения координат ИЗ;
- реализован пробный экземпляр прибора для двухмерного случая;
- экспериментально подтверждена работоспособность метода и прибора;
- проведены серии опытных измерений, на основе которых были выработаны рекомендации для дальнейшего использования и совершенствования системы.
Проведенные эксперименты показали, что возможность разработки простой системы определения координат источника звука существует. Путем улучшения элементной базы прибора, доработкой схемотехнической и программной части можно улучшить характеристики существующего экспериментального образца и перейти к определению координат реальных объектов в пространстве.
Литература
1. Большая советская энциклопедия [Текст] : в 30 т. / гл. ред. А. М. Прохоров. - 3-е изд. - М. : Сов. энцикл., 1969-1978. - 30 т.
2. Канатников, А.Н., Крищенко, А.П. Аналитическая геометрия [Текст]: Учеб. для вузов/А.Н Канатников; под ред. В.С. Зарубина, А.П. Крищенко. – М.: Изд-во МГТУ им. Н.Э,Баумана, 2002. – 388с.
3. Аш, Ж. Датчики измерительных систем [Текст]: в 2 т./Ж. Аш; под ред. А.С. Обухова; Пер. с франц. – М.: Мир, 1992. – 480 с.
4. PIC16F877 [Электронный ресурс]: техническая документация для PIC16F877/ Фирма Microchip. - Москва, 2002. – Режим доступа http://www.microchip.ru.