ПОЛЯРИЗАЦИОННЫЙ
ДОПЛЕРОВСКИЙ МЕТЕОРОЛОГИЧЕСКИЙ РАДИОЛОКАТОР С-ДИАПАЗОНА СО СЖАТИЕМ ИМПУЛЬСОВ
В. С. Ефремов, Б. М. Вовшин,
И. С. Вылегжанин, В. В. Лаврукевич, Р. М. Седлецкий
ОАО
«Научно-производственное объединение
«Лианозовский электромеханический завод»
Получена 20 августа 2009 г.
В работе представлены результаты теоретических и экспериментальных работ по обоснованию типа зондирующего сигнала и методов спектрального анализа (СА) для определения характеристик метеообъектов. По полученным данным проведен сравнительный анализ измеряемых параметров метеообразований для сигналов разных типов и подтверждена возможность применения сложных сигналов и «сверхразрешающих» методов СА для нужд метеолокации. Рассмотрены основные принципы построения разрабатываемого поляризационного доплеровского метеорологического радиолокатора диапазона 5,3 см и представлена структурная схема доплеровского метеорадиолокатора (ДМРЛ) с кратким описанием.
Ключевые слова: методы спектрального анализа, поляризационный доплеровский метеоролический радиолокатор.
Введение
В настоящее время во всем мире основным измерительным метеорологическим средством для дистанционного зондирования атмосферы являются метеорадары.
С помощью метеорадиолокаторов в метеорологии производятся различные наблюдения:
- определение скорости и направления движения метеообразований;
- обнаружение атмосферных фронтов и границ облаков и осадков;
- обнаружение турбулентных и конвективных образований атмосферы;
- определение фазового состава метеообразований.
При этом как в отечественных, так и в зарубежных ДМРЛ используются простые зондирующие сигналы с высокой импульсной мощностью (несколько сотен кВт), а для разрешения противоречия между однозначностью измерений дальности и скорости используются два режима работы с различными периодами повторения импульсов. Недостатками указанных принципов являются:
- снижение производительности ДМРЛ из-за введения двух режимов работы: режим «отражаемость» (период вращения по азимуту 10 сек) и режим «скорость» (период – 20 сек);
- различная дальность действия ДМРЛ в зависимости от режима («отражаемость» – 250 км, «скорость» – 125 км);
- высокая импульсная мощность передающего устройства, снижающая надежность, удобство эксплуатации и характеристики ЭМС ДМРЛ;
- большое число импульсов пачки, необходимое для точного измерения скорости метеообразований методом ДПФ или пульс-парным методом при ограниченном применении вобуляции частоты повторения импульсов (не более 3 различных периодов) с целью устранения неоднозначности по скорости;
- необходимость увеличения импульсной мощности передатчика в два раза для работы на двух поляризациях, что приводит к замене передатчика на более мощный и использования элегаза для поддува волноводного тракта.
Для традиционных РЛС, работающих с точечными целями, методы устранения отмеченных недостатков известны. В частности, для снижения импульсной мощности РЛС используются сложные сигналы, а для устранения неоднозначности по дальности и скорости – вобуляция периодов повторения импульсов в широких пределах. Для повышения точности оценки спектров применяются «сверхразрешающие» (по сравнению с методом ДПФ) алгоритмы спектрального анализа (СА). Однако применимость указанных методов в метеолокации не очевидна по нескольким причинам. Особенностью метеолокации является протяженный характер метеообъектов, их относительно невысокая скорость и возможная турбулентность.
Особенности применяемых сигналов и методов спектрального анализа
1.1. В отличие от классической радиолокации, где обнаруживаемые цели имеют размеры меньше размеров элемента разрешения, в метеолокации обнаруживаемые цели представляют собой протяжённые объекты, локация которых предъявляет особые требования к параметрам зондирующего сигнала, к корреляционной обработке и к стабильности характеристик приёмного и передающего трактов.
Метеолокатор должен обеспечивать хорошее разрешение гидрометеоров и с высокой точностью определять границы метеообразований. Кроме того, в метеолокации требуется высокая точность измерения мощности сигналов, отражённых от гидрометеоров.
В последнее время появились теоретические и экспериментальные результаты по использованию сложных сигналов в метеорадиолокаторах [1-5] с целью повышения потенциала и улучшения эксплуатационных характеристик МРЛ, при сохранении разрешающей способности, присущей простым сигналам.
В работе [6] было показано, что при использовании ЛЧМ сигналов, для обеспечения достоверности измерения параметров протяжённых объектов, практически такой же, как и для локатора с простым сигналом, необходимо использовать специальную весовую обработку – инверсную фильтрацию с последующим весовым окном Натолла. При такой обработке уровень боковых лепестков уменьшается до 97,5 дБ, а потери, при оптимальном выборе полосы пропускания инверсного фильтра, составляет величину 0,9 дБ, что на 0,4 дБ лучше, чем при использовании окна Хэмминга.
 Дополнительное уменьшение
потерь в отношении сигнал/шум с 0,9 дБ до 0,4 дБ можно получить при
использовании специальных синтезированных нелинейночастотно модулированных (НЧМ)
сигналов. Кроме того, НЧМ сигналы обеспечивают улучшение доплеровской
устойчивости.
Дополнительное уменьшение
потерь в отношении сигнал/шум с 0,9 дБ до 0,4 дБ можно получить при
использовании специальных синтезированных нелинейночастотно модулированных (НЧМ)
сигналов. Кроме того, НЧМ сигналы обеспечивают улучшение доплеровской
устойчивости.
В результате проведения численного и натурного экспериментов были получены следующие результаты:
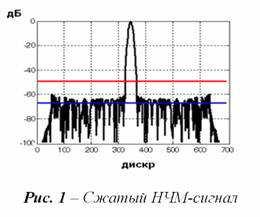
1. Синтезирован НЧМ сигнал, корреляционная функция которого имеет минимаксный уровень боковых лепестков 65 дБ и среднеквадратический уровень 70 дБ (рисунок 1) при потерях в отношении сигнал/шум 0.4 дБ для нулевого смещения частоты и 60-65 дБ при доплеровском смещении 2 кГц.
2. Проведено статистическое моделирование измерения параметров протяжённых объектов при использовании НЧМ сигналов.
3. Обработка НЧМ сигнала произведена во временной области.
Таким образом, основные преимущества НЧМ сигналов перед ЛЧМ – это меньшие потери в отношении сигнал/шум (0.4 дБ), более высокая доплеровская устойчивость, отсутствие инверсного фильтра и возможность обработки во временной области.
1.2. При оценке спектральных характеристик метеоцелей (для определения параметров скорости метеообъектов) традиционно применяется спектральный анализ на основе дискретного преобразования Фурье (ДПФ). В [7] анализировались особенности и недостатки классического спектрального анализа на основе ДПФ, обусловленные конечным временным интервалом наблюдения в каждом импульсном объеме.
В результате проведения натурного эксперимента была показана возможность улучшения качества воспроизведения энергетических спектров отражений, основанная на переходе к "сглаженным" вариантам ДПФ и "сверхразрешающим" алгоритмам спектрального оценивания [8-9]. В последних формируются различные "спектральные функции" (СФ) матрицы, обратной оценке априори неизвестной М х М корреляционной матрицы (КМ) М-элементной пачки отражений в соответствующем импульсном объеме.
Эти СФ могут быть сформированы только после получения оценок КМ. Поскольку функции этих оценок не могут содержать больше информации, чем содержится в самих оценках, было предложено отказаться от формирования "сверхразрешающих" СФ и извлекать необходимую информацию из параметров слабозаполненных сомножителей матрицы, обратной оценке КМ. Целесообразная структура сомножителей соответствует "обобщенной факторизации Левинсона" обратной матрицы, порождающей адаптивный решетчатый фильтр (АРФ) [10-12]. Параметры уже его первой ступени определяют три первых момента спектра (отражаемость, средняя доплеровская частота и ширина спектра), играющих важнейшую роль в определении характеристик гидрометеоров.
Результаты
экспериментов

2.1. Особенности и многообразие возможных ситуаций не всегда поддаются корректному описанию при математическом моделирова-нии. Поэтому на этапе проектирования первого отечественного ДМРЛ были проведены натурные испытания с целью подтверждения основных принципов построения.
Эксперимент проводился на базе Филиала ГГО им. Воейкова и Центральной аэрологической обсерватории с использованием аппаратуры аэродромного радиолока-ционного комплекса (АРЛК) «Лира-А10» (длина волны 10 см) и метеорадиолокатора МРЛ-5 (рисунок 2).
Эксперимент являлся полунатурным, поскольку прием и внутриимпульсная обработка (сжатие) отраженных сигналов были реализованы в реальном времени, а междупериодная обработка осуществлялась по записям реальных ситуаций на ЭВМ.
На первом этапе экспериментальных работ проводилось сравнение карт отражаемости при использовании простых и сложных сигналов.
На рисунке 3 показаны карты отражаемости, полученные аппаратурой "МЕРКОМ" при использовании штатной аппаратуры 3,2-см канала МРЛ-5 и АРЛК "Лира-А10" (НЧМ сигнал длительностью 60 мкс) соответственно.
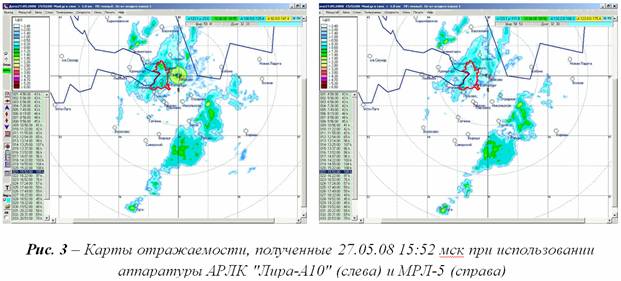
Сравниваемые карты отражаемости получены одновременно в одинаковых метеорологических условиях.
Полученные карты отражаемости хорошо согласуются при отображении одинаковой метеообстановки. Незначительно расхождение карт определяется разницей ширин и ориентаций максимумов диаграмм направленности антенной системы МРЛ-5 в 3,2-см и 10-см диапазонах, а также наличием отражений от подстилающей поверхности.
На втором этапе экспериментальных работ проводилась сравнительная оценка разрешающей способности при работе с простыми и сложными сигналами при использовании простого и НЧМ-сигналов АРЛК "Лира-А10".
При сравнении разрешающей способности при использовании короткого сигнала АРЛК "Лира-А10" (2 мкс) и НЧМ сигналов (60 мкс) для выравнивания энергетических потенциалов применялось накопление простых сигналов (100 импульсов) на выходе амплитудного детектора.
На рисунке 4 приведены профили отражаемости, полученные при некогерентном накоплении 100 простых импульсов (красный) и осреднения 100 импульсов НЧМ (синий), обработанных АРЛК «Лира-А10».

Количественные оценки профилей сложного и простого сигналов показали высокую степень совпадения. Различие в профилях отражаемости в серии обработанных экспериментальных данных при динамическом диапазоне целей более 50 дБ находится в пределах 10-20 % для ОСШ более 7 дБ.
В результате обработки зарегистрированных данных 18.06.08 в 200-километровой зоне относительно точки стояния РЛС были получены данные о мощности отражений от метеообъектов с градиентами до 50 дБ в интервале 0-10 км от максимума. Для указанных уровней отсутствовало какое-либо влияние боковых лепестков на радиальное распределение мощности отражений от метеообъектов для сжатого НЧМ-сигнала.
2.2. Сравнительный анализ радиальных скоростей метеоотражений проводился различными методами (ДПФ, пульс-парный метод, метод Кейпона).
На рисунке 5 показана шкала скоростей, полученных при обработке. На рисунке 6 представлены скоростные характеристики, полученные при использовании простого и сложного сигналов в зоне 50 км и обработанные методом Кейпона.
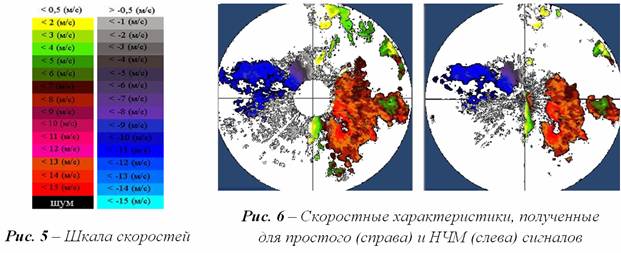
Поля скоростей для простого и НЧМ-сигнала совпадают как качественно, так и количественно. Отличие площадей закрашенных областей объясняется более низким ОСШ для простого сигнала.
Кроме того, в ходе экспериментов проводился анализ спектров междупериодных флуктуаций для записей, сделанных при невращающейся антенне (записи простого и сложного сигнала осуществлялись с интервалом в 1 минуту).
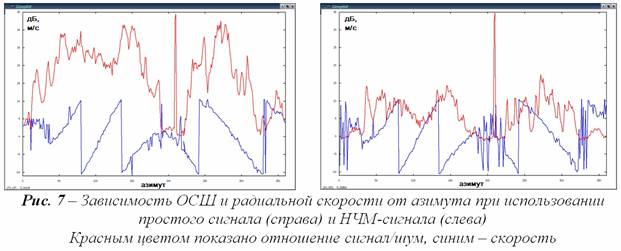
Как видно из рисунка 7 радиальные скорости (т.е. центральные моменты спектров, вычисленных по пачкам в 200 импульсов методом ДПФ) для НЧМ и МОНО сигналов при ОСШ более 3 дБ полностью совпадают. Снижение ОСШ приводит к увеличению влияния шумов и ошибкам в определении скорости.
На рисунке 8 показаны спектры для МОНО и НЧМ сигналов, вычисленные по пачкам в 200 импульсов методом ДПФ (скорости показаны в интервале однозначности).
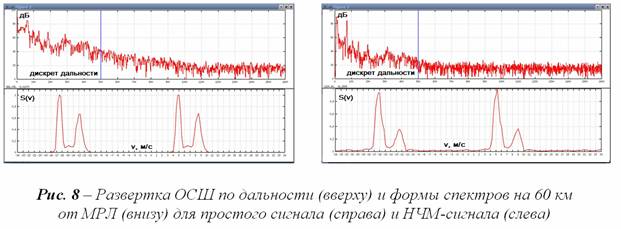
На данном типичном примере видно совпадение форм спектров для разных типов сигналов, а также значений скоростей максимумов спектральных компонент междупериодных флуктуаций. Незначительные отличия уровней максимумов объясняется различным ОСШ, а также временным разносом записей для разных типов сигналов. При этом в случае применения ДПФ для определения радиальной скорости требовалась пачка примерно в два раза большая, чем для метода Кейпона, что подтвердило теоретические исследования [7]. Кроме того, в ходе экспериментов было обнаружено, что реальные спектры метеоотражений при измерении радиолокационными методами часто бывают двух-, трехмодовыми. В случае применения пульс-парной обработки для определения спектральных характеристик метеообъектов это может привести к значительным ошибкам в определении реальных скоростей, поскольку данный способ СА основан на постулате о гауссовой форме спектра метеоотражений.
Таким образом, в ходе экспериментов было подтверждено, что спектр междупериодных флуктуаций не зависит от типа зондирующего сигнала, а также показано преимущество «сверхразрешающих» методов СА перед методом ДПФ и пульс-парной обработкой.
Краткое описание разрабатываемого поляризационного доплеровского метеолокатора С-диапазона
На рисунке 9 представлена структурная схема разрабатываемого
доплеровского метеорологического радиолокатора.
Антенная система ДМРЛ включает в себя параболическую антенну с круглым рупором, обеспечивающим игольчатые ДН по каналам вертикальной и горизонтальной поляризаций; опорно-поворотное устройство; СВЧ вращающиеся сочленения; датчики угловых перемещений по азимуту и углу места; приводы азимутального вращения и угломестного качания. Ширина луча антенны для каждой поляризации не более 1 град, уровень боковых лепестков не более минус 29 дБ; излучаются независимо горизонтальная и вертикальная поляризации.

Рис.9. Структурная схема ДМРЛ
Аппаратный модуль включает в себя клистронный усилитель мощности; четырехканальное полностью твердотельное приемное устройство, обеспечивающее линейный динамический диапазон более 100 дБ для каждой из поляризаций; систему цифрового формирования и обработки сигналов; систему метеорологической обработки и связи с потребителями; вспомогательные системы (системы электропитания, обеспечения тепловых режимов, контроля и управления и т.д.).
Передающее устройство построено по принципу внутренней когерентности и состоит из одного передатчика на базе высокостабильного клистронного усилителя мощности С-диапазона, с полностью твердотельным модулятором, резонансным стабилизатором анодного напряжения 10 кВ и воздушным охлаждением. На выходе формирователя сигналов формируется зондирующий сигнал длительностью от 1 мкс (короткий импульс) до 100 мкс (НЧМ-импульс) с минимальной скважностью 20, усиливаемый в передатчике до 15 кВт. Такое построение обеспечивает необходимый уровень средней мощности и обеспечивает радиус зоны ответственности от 1 до нескольких сотен км. На выходе передатчика устанавливается делитель на 2 для обеспечения излучения на двух ортогональных поляризациях.
Использование НЧМ-сигналов позволяет измерять скорость и отражаемость без изменения частоты повторения импульсов, увеличить на коэффициент сжатия динамический диапазон, а также устранить неоднозначную дальность за счет применения ортогональных сигналов (при использовании разного наклона при модуляции частоты).
Приемная система состоит из двух каналов, обрабатывающих независимо вертикальную и горизонтальную поляризации. Каждый приемный канал состоит из двух подканалов, обеспечивающих прием и преобразование радиолокационных сигналов с выхода волноводного тракта. При этом для обеспечения линейного динамического диапазона на уровне 100 дБ один из каналов работает от выхода направленного ответвителя с ослаблением относительного основного канала 30-40 дБ. Коэффициент шума каждого канала приемного устройства составляет не более 3 дБ.
Система обработки сигналов и информации обеспечивает цифровую обработку сигналов, первичную и метеорологическую обработку радиолокационной информации.
Аналого-цифровое преобразование эхо-сигналов каждого приемного канала производится в первичной обработке на промежуточной частоте, для чего используется 14-разрядный АЦП. Аппаратура цифровой обработки совместно с приемным трактом обеспечивает линейный динамический диапазон обрабатываемых сигналов порядка 70 дБ в каждом подканале. Совместная обработка двух подканалов позволяет получить сквозной линейный динамический диапазон не менее 100 дБ. Система оценки отражаемости и спектральных характеристик метеообъектов реализуется на специальном сигнальном процессоре. Коэффициент подавления отражений от неподвижных местных предметов не хуже 50 дБ.
Система вторичной метеорологической обработки информации не реже одного раза в несколько минут обеспечивает представление в виде карт горизонтального и вертикального сечений пространства, а также кодирует и выдает потребителям следующую информацию о:
- отражаемости в горизонтальных сечениях на различных уровнях высоты и вертикальных сечениях по различным азимутам;
- высотах облачности;
- радиальных доплеровских скоростей в горизонтальных сечениях на различных уровнях высоты;
- среднеквадратичной ширины спектра скоростей;
- опасных метеоявлений;
- видимости в осадках;
- интенсивности осадков;
- количестве осадков за любой промежуток времени наблюдений;
- скорости и направления перемещения облачных систем;
- скорости шквалов;
- фазовом состоянии метеообъектов.
Автоматизированная система контроля и управления обеспечивает контроль всех основных параметров ДМРЛ (выходной мощности, КСВ, чувствительности приемника и т.д.), контроль работоспособности всех устройств локатора, а также управление режимами работы по команде оператора.
Заключение
Проведенный теоретические и экспериментальные исследования показали, что достигнутый уровень боковых лепестков сжатого сигнала (менее 50 дБ) не влияет на возможности определения отражаемости метеообразований и классификации опасных метеоявлений при использовании сложных сигналов в метеолокации.
Результаты сравнительной оценки основных параметров спектров метеообразований, полученные при использовании простых и сложных сигналов, имеют высокую степень подобия. Результаты экспериментов подтверждают предсказанные теорией преимущества по сравнению с традиционным для метеолокации методом ДПФ "сверхразрешающих" методов спектрального анализа (в частности, использованных в эксперименте модификаций методов Кейпона и Берга).
Полученные результаты подтверждают возможность использования сложных сигналов (типа НЧМ с уровнем боковых лепестков менее 50 дБ) и «сверхразрешающих» методов спектрального анализа в метеорадарах. При этом, при разработке серийных ДМРЛ возможно независимое изменение разрешающей способности и уровня средней мощности радиолокатора за счет цифрового формирования и обработки сигналов.
Результаты исследований
положены в основу разрабатываемого доплеровского метеорологического
радиолокатора диапазона 5,3 см и представлены в виде варианта построения
передатчика со сложным сигналом в Техническом задании на ОКР
«ДМРЛ-С».
Литература
1. Bech, J., Vilaclara, E., Pineda, N., Rigo, T., López, J., O'Hora, F., Lorente, J., Sempere, D., Fàbregas, F. X., 2004: The weather radar network of the Catalan Meteorological Service: description and applications. European Conference on Radar in Meteorology and Hydrology (ERAD) - COST 717 Final Seminar, ERAD Publication Series Vol 2. Copernicus GmbH (c) 2004, ISBN 3-936586-29-2, pp. 416-420.
2. Ivic, IR, A Zahrai and DS Zrnic, 2003. Whitening in range to improve weather radar spectral moment estimates. Part 2: Experimental evaluation. J. Atmos. Oceanic, Technol., 20, 1449-1459.
3. O’Hora, F. and Bech, J., 2005: Operational use of pulse compression in weather radar. 32nd Conference on radar meteorology, AMS, Albuquerque, NM.
4. O’Hora, F and Keeler R. J., 2006: Comparison of Pulse compression & Whitening Transformation signal processing. Proceedings of the ERAD2006.
5. Puhakka, T., Puhakka, P. and O’Hora F., 2006: On the performance of NLFM pulse compression with Polarimetric Doppler radar. Proceedings of the ERAD2006.
6. Gennady P. Bendersky, Viacheslav S. Efremov, Rudolf M. Sedletsky. The Syntesis of Signal, Steady to Doppler Shift of Frequency for Air Traffic Radar Control Radars. India, IRSI, 2003.
7. Леховицкий Д.И., Жуга Г.А., Вовшин Б.М., Лаврукевич В.В., Извлечение метеоинформации на основе спектрального и корреляционного анализа отражений в импульсных доплеровских метеорологических РЛС // Прикладная радиоэлектроника, т. 6 № 4. 2007, стр. 491-510.
8. Леховицкий Д.И., Атаманский Д.В., Кириллов И.Г. Разновидности «сверхразрешающих» анализаторов пространственно-временного спектра случайных сигналов на основе обеляющих адаптивных решетчатых фильтров // Антенны.–2000.–№2.–С.40–54.
9. Леховицкий Д.И. ,Зарицкий В.И., Бурковский С.И., Полишко С.В. Системы междупериодной обработки сигналов на фоне гауссовых пассивных помех в импульсных РЛС (теория, структуры, потенциальная и реальная эффективность). Сборник научных трудов 2-го Международного радиоэлектронного форума "Прикладная радиоэлектроника. Состояние и перспективы развития" (МРФ' 2005). Харьков, 2005, Т. 2, с. 20 – 23.
10. Lev-Ari H., Kailath T. Schur and Levinson algorithms for nonstationary processes. Proc. IEEE Int. Conf. Acoust, Speech and Signal Process (Atlanta, CA, March 1981), p.860-864.
11. Леховицкий Д.И. Обобщенный алгоритм Левинсона и универсальные решетчатые фильтры. // Радиофизика.–1992.–т.35.–№9-10.–С.790-808.
12. Леховицкий Д.И., Милованов С. Б., Раков И. Д., Свердлов Б. Г. Универсальные адаптивные решетчатые фильтры. Адаптация при заданном корне из оценочной корреляционной матрицы // Известия ВУЗов. Серия Радиофизика. – 1992. – № 11 – 12. – С. 969–992.