Перспективы развития методов и систем радиолокационного наблюдения космического базирования
Л. Б. Неронский
ОАО «Концерн радиостроения «Вега»
Получена 15 ноября 2011 г.
Аннотация. Рассмотрены вопросы комплексного использования оптических и радиолокационных снимков в современных геоинформационных технологиях. Дано сравнение геометрических, изобразительных и измерительных свойств оптических и радиолокационных датчиков с высокой разрешающей способностью. Рассмотрены место радиолокационных датчиков в системе глобального мониторинга земных процессов, стандартные и расширенные режимы работы. Дан обзор действующей глобальной орбитальной группировки и предложения по перспективным РСА, включая отечественный РСА S-диапазона волн в составе малого космического аппарата «Кондор-Э». Рассмотрены направления совершенствования космической радиолокационной аппаратуры землеобзора и предложения по проведению экспериментов с РСА МКА «Кондор-Э».
Ключевые слова: космическая радиолокация, геоинформационные технологии, глобальный мониторинг.
Abstract. The problems of integrated use of optical and radar imagery in modern geoinformation technologies are discussed. A comparison of geometric, graphic and measuring properties of optical and radar sensors with high resolution is fulfilled. The place of space radar sensors in the system of global monitoring of terrestrial processes, as standard and advanced operation modes, are considered. A review of the current global constellation and proposals for prospective SAR, including Russian S-wave band SAR in the small spacecraft, "Condor-E.", are given. The ways of improving of space radars for surface monitoring and proposals for experiments with SAR "Condor-E” are shown.
Keywords: space radar, GIS technology, global Earth's surface monitoring.
Введение
Современные геоинформационные технологии предусматривают комплексное использование разных источников данных, включая датчики дистанционного зондирования Земли (ДЗЗ) в оптическом, ИК и СВЧ диапазонах электромагнитных волн, оперативную информацию о подвижных объектах от аппаратуры навигации и позиционирования (GPS, ГЛОНАСС), наземных диспетчерских пунктов, региональных центров мониторинга окружающей среды [1–3].
Преимущества радиолокационного зондирования и, в частности, систем радиовидения состоят в том, что они являются средством выявления физических свойства объектов в СВЧ-диапазонах волн и измерительным инструментом с возможностями использования фазовой информации, применении широкого набора режимов съемки и алгоритмов обработки данных, что позволяет существенно расширить круг решаемых прикладных задач в научной, хозяйственной сферах, мониторинге катастроф и чрезвычайных ситуаций, обеспечении государственной безопасности.
Близость получаемых радиолокационных изображений (РЛИ) и оптических снимков по пространственному разрешению (от 0,4…2 м) и изобразительным свойствам позволяет сравнить информативность этих средств ДЗЗ, используя совместимые количественные критерии и возможности совместного дешифрирования снимков визуально-инструментальными методами.
Учтём, что при отображении снимков на мониторе оператора возможно подключение программных модулей для адаптации условий дешифрирования и измерения параметров объектов (размеров, отражающей способности, гистограмм, текстуры и др.). Благодаря свойствам зрительного анализатора как оптимального фильтра методы автоматизированной обработки снимков могут служить основой для реализации процедур автоматической обработки данных в режиме реального времени со снижением трудозатрат, повышением оперативности наблюдения, распознаванием типа объектов, выявлением изменений в обстановке.
Действующая в настоящее время глобальная орбитальная группировка оптических и радиолокационных датчиков включает в себя более 26 оптических спутников (включая российский «Ресурс-ДК1» [4]) с пространственным разрешением от 0,4 м и 25 зарубежных спутников с РСА в сантиметровых (X- и C-диапазонах волн) с пространственным разрешением от 0,5 м. Спектр электромагнитных колебаний, используемых для оптического наблюдения и радиовидения, приведен на рис. 1.
В следующих разделах проведено сравнение информативности современных оптических и радиолокационных сенсоров, рассмотрены режимы радиолокационной съемки и сравнительные характеристики перспективных РСА, включая отечественный РСА S-диапазона волн малого космического аппарата (МКА) «Кондор-Э», запуск которого ожидается в ближайшем будущем. Предложены научные программы для экспериментального подтверждения полученного в предыдущие годы научно-технического задела, его развития применительно к созданию перспективных аэрокосмических систем ДЗЗ, совершенствованию методов обработки получаемой геоинформации и ее применения в практической деятельности.
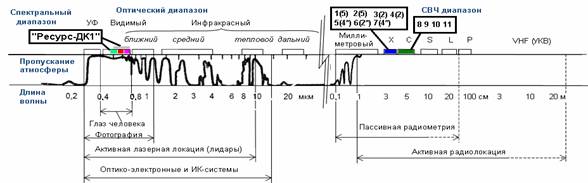
Рис. 1. Спектр электромагнитных волн, используемых для оптического наблюдения («Ресурс-ДК1») и радиовидения, области прозрачности атмосферы, действующие спутники с РСА (в скобках указано число спутников в глобальной орбитальной группировке [5]): 1 – COSMO Sky-Med, Италия; 2 – SAR Lupe, Германия; 3 – TerraSAR-X и TanDEM-X, Германия; 4 – TECSAR и RISAT-2 (Индия), разработка Израиля; 5 – LACROSSE*, США; 6 – IGS-1/4A*, Япония; 7 – JANBING*, Китай; 8 – RADARSAT-1 и 9 – RADARSAT-2, Канада; 10 – ERS-2 и 11 – ENVISAT, ЕКА; диапазон волн РСА, отмеченных звездочкой, указан предположительно.
1. Свойства изображений оптических и радиолокационных сенсоров
Проведем сравнение основных геометрических, изобразительных и измерительных свойств оптических и радиолокационных снимков. Для примера рассмотрим находящиеся в эксплуатации оптическую аппаратуру отечественного спутника «Ресурс-ДК1», радиолокаторы X-диапазона волн TerraSAR-X (Германия), РСА S-диапазона волн МКА «Кондор-Э».
Оптический датчик КА «Ресурс-ДК1» [4]. КА «Ресурс-ДК1» был выведен 15.06.2006 на эллиптическую орбиту с перигеем 361 км и апогеем 604 км при угле наклонения 64,8° или 70°. Аппарат стабилизирован по трем осям с точностью ориентации 0,2 угл. мин., точность поддержания угловой скорости 0,005°/с. Обеспечивается съемка Земли в панхроматическом режиме (l=0,58–0,8 мкм) и в мультиспектральном спектрозональном режимах (МСР) с каналами: зеленый (l=0,5–0,6 мкм), красный (l=0,6–0,7 мкм) и ближний ИК (l=0,7–0,8 мкм) каналы. Пространственное разрешение при плановой съемке в надир с рабочей высоты 360 км равно 0,9…1 м (панхром) и 2…3 м (МСР).
Оптико-электронная сканирующая камера включает телескопический объектив с фокусным расстоянием f = 4 м, апертурой Do = 50 см и 4 линейных матрицы, каждая из 36 ПЗС по 1024 пикселя размером 9´9 мкм. Полоса плановой съемки в надире 28,3 км. Поворот КА по крену на ±30° обеспечивает перспективную съемку в полосе обзора 448 км. Измеренные по полигонам геометрические погрешности снимков не превышают ±0,5 м (~0,5 пикселя).
Геометрия построения снимков. Для сканирующего фотоприемника с линейной матрицей изображение формируется в координатах путевая дальность и угол места (вдоль и поперек трассы). Угол зрения снимка в надир без учета кривизны Земли равен (см. рис. 2,а)
![]() =4,5°, (1)
=4,5°, (1)
где Ycn =28,3 км – ширина полосы съемки; Hs=360 км – высота орбиты КА.
a) б)
Рис. 2. Геометрия обзора при съемке в надир (а) и геометрия пересчета горизонтальной дальности в наклонную для РБО или угол визирования при перспективной фотосъемке (б).
Съемка в надир не имеет радиолокационного аналога. Перспективная космическая фотосъемка (под углом к надиру) по равнинной поверхности может рассматриваться как аналог радиолокационной съемки с помощью радиолокатора бокового обзора (РБО). С учетом кривизны Земли удаление объекта по «горизонтальной» дальности Y (по дуге Большого круга) от следа КА F пересчитывается в наклонную дальность для РБО или в угол визирования для оптического датчика
 (2)
(2)
где Rs и Re – локальные радиусы орбиты КА и Земли; h – высота рельефа; R0 и g0 – наклонная дальность и угол визирования для референц-эллипсоида (h=0), вторые члены формул относятся к поправкам на высоту рельефа.
Точность измерений координат объектов по фотоснимкам и РЛИ при автономной работе определяется точностью баллистических данных, включая позиционирование КА, а также для фотоснимков ошибками ориентации осей КА. Погрешности абсолютных измерений координат для обоих типов датчиком может составлять 20…50 м с их снижением до долей пикселя по ориентирам на местности и использовании ЦМР.
Линейное разрешение, указанное в спецификации датчика подтверждается выбранными его параметрами и измерениями по снимкам. Методики оценки пространственного разрешения в оптике – по ширине полей тестовой миры, и в радиолокации – по ширине импульсного отклика на точечную цель, близки и их различием можно пренебречь. Так, для «Ресурса-ДК1» разрешение ~1 м обеспечивается дискретностью матрицы 9 мкм (соответствует 0,81 м на Земле), а для TerraSAR-X при полосе сигнала 150 МГц и частоте квантования 165 МГц измеренное по РЛИ (г. Розенхайм, Германия) разрешение составляет по дальности 1,3 м и по азимуту 1,5 м [2].
Радиометрическое разрешение снимков и количество передаваемых градаций. В отличие от систем с монохроматическим облучением объектов – радиолокаторов (ширина спектра не более 1 ГГц) или систем с лазерным подсветом (≤1000 ГГц) в оптических системах (панхром или спектрозональных) ширина спектра облучения составляет десятки и сотни террагерц (142, 100, 71, 54 ТГц, см. «Ресурс-ДК1», рис. 1). При регистрации оптических изображений происходит усреднение спектральных составляющих принятых сигналов и практически радиометрическое разрешение определяется аддитивным шумом видеодатчика. Для видеоизображений полезный диапазон яркостей обычно не превышает 20…22 дБ (например, серебристый самолет на фоне мокрого асфальта или травы). Число разрешаемых градаций для видеодатчика при можно оценить через отношение перепада яркостей Emax-Emin к СКО шумов s
![]() =50…100,
(3)
=50…100,
(3)
где a »3,16 – пороговый коэффициент для зрительного анализатора [2].
Объем информации от участка местности, например, с площадью S0=100×100 м (1 га)
![]() =55…65 кбит/га.
=55…65 кбит/га.
Для РСА высокого разрешения ~1 м исходным материалом является амплитуда комплексного РЛИ (КРЛИ) с одним наблюдением SLC (single look complex). Поскольку для компонентов КРЛИ нет принятых обозначений будем называть их АРЛИ – амплитудное, ЭРЛИ – энергетическое (квадрат амплитуды) и ФРЛИ – фазовое или в английской нотации ASLC, ESLC, PhSLC. Для РЛИ пороговая чувствительность ограничена спекл-шумом, имеющим мультипликативный характер. Число разрешаемых градаций выражается через интегральное преобразование [2]
 ,
(4)
,
(4)
где a=ln(3,16) – пороговый коэффициент (вероятность ошибки принятия
решения не более 0,34); Ne
– число наблюдений в элементе разрешения;![]() – максимальная удельная ЭПР цели
(уголкового отражателя) с размерами rX×rY, равными элементу разрешения РСА с
длиной волны l;
– максимальная удельная ЭПР цели
(уголкового отражателя) с размерами rX×rY, равными элементу разрешения РСА с
длиной волны l;
![]() –
чувствительность РСА (УЭПР шумового эквивалента). Динамический диапазон РЛИ
составляет
–
чувствительность РСА (УЭПР шумового эквивалента). Динамический диапазон РЛИ
составляет![]() дБ.
дБ.
Таблица 1. Оценка информативности космических РСА
|
Параметр |
l, м |
rX×rY, м2 |
|
|
D, дБ |
n |
QS0, кбит/га |
|
РСА TerraSAR-X |
0,0308 |
1,2×1 |
-30 |
37,24 |
67,2 |
13,5 |
30,5 |
|
РСА МКА «Кондор-Э» [2] |
0,09375 |
1,1×1,25 |
-20 |
28,16 |
48,2 |
13,6 |
31,4 (Ne=2) |
Повышение радиометрического разрешения РСА «Кондор-Э» в прожекторном режиме достигается применением внутриэлементного накопления Ne=2. В остальных режимах некогерентное накопление реализуется за счет ухудшения пространственного разрешения, что приводит к уменьшению объема получаемой информации, хотя и может способствовать идентификации объектов наблюдения.
Геометрические измерительные свойства видеодатчиков достигаются высокой точностью изготовления объектива и калибровкой по местным ориентирам, учетом рефракции в атмосфере. Геометрической точности методов стереометрии (даже при совместном использовании оптических и радиолокационных датчиков [2]) оказывается недостаточно для решения задачи построения высокоточных карт рельефа. Эта задача успешно решается применением методов радиолокационной интерферометрии.
Яркостные измерительные свойства пассивных видеодатчиков зависят от уровня и спектрального состава подсвета с учетом направления и угла места облучения, ракурсов наблюдения и влияния атмосферной дымки. Применяют разные методики расчета альбедо по данным МСР зондирования, но чаще используют отношения яркостей, например, в ИК и красном каналах NDVI=(NIR-RED)/(NIR+RED) - вегетационный индекс [6]. В отличие от видеодатчиков РСА являются измерительным инструментом для оценки ЭПР объектов, удельных ЭПР протяженной поверхностей, поляриметрических матриц рассеяния, с точностью измерений (от ~0,5 дБ), обеспечиваемой технологиями калибровки и валидации по сертифицированных измерительных полигонам.
Таким образом, при равном разрешении РЛИ уступают оптическим снимкам по информативности. Их преимущество – во всепогодности, измерительных свойствах интерферометрии и поляриметрии, получении сигнатур объектов, оценки скоростей движения объектов.
2. состояние и направления совЕршенствования космических рса
За исторический период радиолокационного зондирования Земли из космоса от РБО системы МКРЦ (с 1971 г., X-диапазон волн) и РСА SEASAT-A (1978 г., L-диапазон) можно отметить ряд ключевых событий, определяющих современное состояние и перспективы развития этих средств [2]:
– получение данных с «кирпичиков» многочастотной глобальной информационной системы X-, C-, S- и L-диапазонов волн: РБО на КА «Космос-1500» (X-диапазон, с 1983 г.); Radarsat-1 (C-диапазон, функционирует с 1995 г.); РСА «Меч-К», «Меч-КУ» (S-диапазон, 1987–1989 и 1991–1992 гг.); РСА JERS-1 (L-диапазон, 1992–1998 гг.);
– фундаментальные исследования удельных ЭПР (s0) земных покровов в X-, C- и L-диапазонах волн при поляриметрическом зондировании, выполненных с помощью SIR-C/X-SAR с привлечением самолетного РСА Airsar [7];
– проведение топографической съемки 80% земной поверхности с помощью уникального интерферометра с жесткой базой SRTM;
– информационный взрыв в 2007–2010 гг. – запуски радаров высокого разрешения, поляриметрическим и интерферометрическим зондированием в сантиметровых диапазонах волн, дополненных оптическими (PRISM, AVNIR-2) и радиолокационными (PALSAR, L-диапазон) данными КА ALOS (2006–2010 гг.).
Функционирующая в настоящее время орбитальная группировка с РСА (см. рис. 1), включает универсальные датчики сантиметровых (X и C) диапазонов волн с разрешением (от 0,5…3 м), позволяющие решать широкий круг практических задач, включая двойное применение. Конструктивные решения предусматривают ставшим уже «классическим» применение АФАР. Для малых спутников (SAR Lupe, TECSAR/RISAT-2) применяют зеркальные антенны с перенацеливанием полосы съемки и прожекторным режимом, реализуемыми разворотами КА. Режимы работы РСА приведены на рис. 3. Двусторонний обзор достигается разворотом КА.
В Radarsat-2 и как дополнение к прожекторному режиму в TerraSAR-X используют маршрутный режим «двойного приема». В нем прием сигналов осуществляют двумя секциями антенны с разделенными по азимуту фазовыми центрами и записывают радиоголограмму расширенный спектром доплеровских частот на удвоенной виртуальной частоте повторения. Это позволяет избежать неоднозначности сигналов по азимуту. Реализуется разрешение по азимуту близкое к ¼ от горизонтального размера антенны (около 3 м для Radarsat-2 и около 1 м для TerraSAR-X). В перспективных РСА может применяться обобщение этого метода как многоканальный режим Скансар с высоким разрешением (HRWS – Hi resolution wide swath mode).
В TerraSAR-X кроме рабочего режима с полосой 150 МГц предусмотрен экспериментальный режим с полосой 300 МГц (частота квантовании 330 МГц) для реализации субметрового (~0,7 м) разрешения. В перспективном TerraSAR-X2 полоса сигнала 600 МГц, разрешение 0,5 м.
Уникальными свойствами обладает синхронная бистатическая система – тандем TerraSAR-X и TanDEM-X, движущихся по параллельным орбитам со смещением поперек и вдоль линии пути. Тандем пригоден для поперечной и продольной интерферометрии с возможностями оптимизации размеров интерферометрических баз для построения карт рельефа, селекции и движущихся наземных целей и измерения их скоростей.
Задача повышения оперативности наблюдения решается созданием многоспутниковых орбитальных группировок Cosmo SkyMed (4 КА), SAR Lupe (5 КА). Для преодоления ограничений в пропускной способности радиолинии передачи данных на Землю в бортовой аппаратуре применяют сжатие радиоголограммы (например, методом BAQ – блочное адаптивное квантование) с представлением выходного продукта в виде 2–4 бит на квадратурную составляющую.
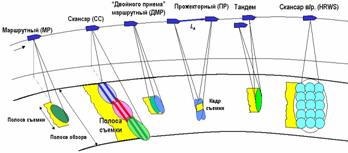
Рис. 3. Режимы съемки в космических РСА.
Научно-технический и практический задел по радиолокационному ДЗЗ и радиовидению, созданный в мире к настоящему времени, включает в себя:
– фундаментальную теорию РСА, включающую вопросы электродинамики (отражение радиоволн от физических сред, прохождение сигналов через ионосферу), формирование зондирующих сигналов с учетом требований к функции неопределенности и форме выходного отклика, методы синтеза апертуры, коррекции траекторных искажений, автофокусировки;
– развитие теории информационно-вычислительных систем, геоинформационных систем, совершенствование радиоэлектронных компонентов, процессоров обработки сигналов;
– результаты теоретических и экспериментальных исследований по многочастотному, поляриметрическому, интерферометрическому ДЗЗ с решением широкого круга прикладных задач;
– практическая реализация универсальных космических РСА с решением задач радиовидения, широким доступом к получаемой информации, использованием Интернет ресурсов;
– практическая реализация синтеза РЛИ во всех используемых режимах съемки, широкое распространение программных пакетов тематической обработки РЛИ для универсальных компьютеров или рабочих станций (например, отечественный Photomod Radar, швейцарский SAR Scape и др.).
В настоящее время в мире для производственных нужд наряду с оптическими и ИК снимками используют коммерческие радиолокационные снимки, полученные в сантиметровых диапазонах волн – с помощью РСА C-диапазона ERS-1, Envisat-1, Radarsat-1, Radarsat-2 с максимальным разрешением, соответственно, 30, 30, 8…11, 3 м и РСА X-диапазона TerraSAR-X, TanDEM-X, Cosmo SkyMed и других с разрешением от долей метра. В связи с прекращением функционирования КА ALOS с РСА PALSAR L-диапазона волн с разрешением от 7 м доступны для распространения только архивные снимки дециметрового диапазона волн. В России в стадии подготовки к запуску находится малый космический аппарат (МКА) «Кондор-Э» с универсальным многорежимным РСА ближнего дециметрового S-диапазона волн для обзора земной и морской поверхности с пространственным разрешением от 1…2 м [2, 7, 8].
Таким образом, у России есть уникальный шанс обеспечить зарубежных и отечественных потребителей полноценной радиолокационной информацией, получаемой на дециметровых волнах с метровым пространственным разрешением. Это позволит России в ближайшей перспективе стать поставщиком конкурентоспособного информационного продукта для практического применения или обмена на зарубежную информацию.
Основными задачами совершенствования аппаратуры космических РСА являются:
– повышение оперативности наблюдения, которое достигается увеличением орбитальной группировки с применением многопозиционного зондирования (технологии MIMO – multi input multi output), включая авиационно-космические системы с подсветом от передатчика на геостационарной орбите [2, 10];
– расширение частотного диапазона космических РСА: частично в высокочастотную область (мониторинг ледников CrioSAR) и преимущественно в дециметровые S-(«Кондор-Э», L-диапазоны (TerraSAR-L) и в P-диапазон для подпочвенного зондирования. Учитывая ограничения полосы сигнала (6…20 МГц), а также деструктивное влияние ионосферы (фазовые флюктуации, эффект Фарадея) канал P-диапазона следует совмещать с более информативным, как это показано в проектах РСА «Алмаз-1В» (S+P) или «Спинар-1ДМ» (L+P);
- развитие технологий АФАР и гибридных зеркальных антенн с АФАР-облучателями (ГАФАР ЗА). Создание сверхширокополосных (СШП) систем с использованием видеорешеток;
– применение расширенных режимов работы (широкозахватные с высоким разрешением, скошенного обзора, многолучевые с селекцией движущихся целей, с применением межвитковой интерферометрии для повышения разрешения поперек трассы полета);
– развитие методов синергетической обработки данных многоспектрального, поляриметрического интерферометрического зондирования, технологии выявления изменений, интеллектуальной (нестандартной) обработки информации, идентификации объектов и др.
Применительно к развитию отечественных средств радиовидения космического базирования представляется целесообразным направить усилия на реализацию РСА X-диапазона волн (взяв за прототип TerraSAR-X и TanDEM-X), S-диапазона (летные испытания и эксплуатация РСА «Кондор-Э» с последующей модернизацией на перспективных комплектующих элементах и возможным развитием до РСА S+P диапазонов волн), L- (L+P)-диапазонов на базе технического задела по БРК «Спинар-1ДМ» для КА «Аркон-2». Ожидаемые параметры перспективных отечественных РСА космического базирования и их сравнение с TerraSAR-X и TerraSAR-L приведены в табл. 2. Для обозначения режимов в ней приняты следующие сокращения: ПР – прожекторный, 2-Пр – двойного приема; МР – маршрутный; ДР – детальный; КР – покадровый; СС – Скансар; Пол – поляриметрический, Э – экспериментальный. При совпадении указано общее значение параметра и отличия для конкретных режимов.
Таблица 2. Сравнительные параметры прорабатываемых перспективных отечественных РСА космического базирования.
|
Диапазон волн |
X |
X |
S |
S (S+P) |
L |
L |
L+P |
|
Космический аппарат, аппаратура РСА |
TerraSAR‑X TanDEM-X |
«Смотр-X» |
«Кондор-Э» |
«Смотр-S» «Смотр-SP» |
TerraSAR-L |
«Смотр-L»
|
«Спинар-1ДМ» |
|
Высота орбиты КА, км |
514 |
600 |
500 |
500 |
500¸630 |
700 |
600 |
|
Наклонение, град |
97,4 |
- |
69 |
60…98 |
97,9 |
- |
98 |
|
Длина волны РСА, см |
3,1 |
3,1 |
9,4 |
«Смотр-S»: 9,4 «Смотр-SP»: 9,4+69 |
23 |
23 |
23+69 |
|
Тип и размер антенны, м |
АФАР 4,8´0,8 |
АФАР 4,87´1,6 |
ГЗА Æ6 м |
АФАР ЗА 10´5 |
АФАР 11´2,6 |
АФАР 12×3,3 |
АФАР 12´3,5 |
|
Направление обзора |
Влево, вправо |
Влево, вправо |
Влево, вправо |
Влево, вправо |
|
Влево, вправо |
Влево, вправо |
|
Режимы работы |
ПР; 2-Пр; МР; СС; Пол; Э |
ПР, МР, КР1-4, СС, Пол, Э |
ПР, ДР, ОР, СС |
ПР, МР, Пол, ММЛР РСА-Р: МР |
МР, СС |
2-Пр, ДР, МР, Пол, СС, |
ДР, МР, СС1/2 |
|
Углы падения, град. |
ПР, МР: 20…55 СС: 20…45 макс 15…60 |
30…51 Пол: 30…45; Э: 15…60 |
20…60 |
20…60 |
15…38 (2 поляриз.) 15…32 (4 поляриз.) |
19,5…43,5 ДР: 26,2…44,8 Пол: 17,3…28 |
19,9…52,2 СС1/2: 16,9…50,5 |
|
Полоса обзора, км |
360 |
450 Пол: 300; Э: 622 |
450 |
500 РСА-Р: 60…120 |
180 / 260 |
390…450 ДР: 390; Пол: 175 |
450 РСА-P: 60…120 |
|
Полоса (кадр) съемки, км |
ПР: (5´15)/(10´15) МР: 30 СС: 100 |
ПР: 10´10 МР, Пол: 45 КР: (50…100)× (40×125) СС: 105×180 Э: 25…45 |
ПР: (8…10)×(8…10) ДР: 10…25 ОР: 20…40 СС: 120 |
ПР: 5×10 МР: 10…40 Пол: 10…60 ММЛР: 500 РСА-Р: 60…120 |
МР: 40 / 60 СС: 180 / 260
|
МР, 2-Пр: 40…100 ДР: 3×(2,5…4,5) Пол: 20…80 СС: 320…360
|
СС1/2: 290 / 450 РСА-P: 60…120 |
|
Поляризация |
ГГВ, ВВГ, ГГ+ВВ |
ВВ; ГГ; ВВГ; ГГВ Пол: ВВГ+ГГВ |
ПР: ВВ; ДР: ВВ, ГГ ОР: ГГ; СС: ГГ |
ВВ, ГГ, ВГ или ГВ Пол и РСА-P: ВВГ+ВГВ |
ВВГ; ГГВ (2 пол) ВВГ+ГГВ (4 пол) |
ВВГ; ГГВ (2 пол) ВВГ+ГГВ (4 пол) |
ГГВ; ВВГ РСА-Р ГГВ; ВВГ; круг. |
|
Разрешение азимут´дальность, м |
ПР: (1…2)´1,2 МР: 3´3; СС: 15´16 Э (300 МГц) от 0,7 м |
ПР: 1´1 МР, МРЭ: 3×3 КР: (5…25)× (5…25) |
ПР: (1…2)´(1…2) ДР: (2,5…3)×(1,5…2,5) ОР: (5…10)×(5…10) СС: 30×30 |
ПР: 1×(1…1,5); МР: 5×5 Пол: (5…10)×(5…10) ММЛР: 10×10 РСА-P: (15…30)×(15…30) |
(9×9) / (15×15) |
2-Пр: 3,5×3,5 ДР: 3×(2,5÷4,5) МР, Пол: 6×6 СС: 30×30 |
ПР: 3×(3…4) МР: 5,4×(2,5…6) СС1: 28×(15…37) СС2: 50× (20…70) |
|
Чувствительность, NESZ, дБ |
–(19…30) |
-(18…21) |
-(15…20) |
ПР, Пол, ММЛР: -22 МР: -17; РСА-P: -24 |
-(30…35) |
-25 ДР: -27 |
ПР: -(28,7…33,7) МР: -(20…32) СС1/2: -(25…39) РСА-Р: -(25…30) |
|
Средняя изл. мощность, Вт |
400 |
450 |
200 |
340 |
400 |
290 |
198 (L), 100 (P) |
|
Энергопотребление, Вт |
|
5166 |
1700 |
1700 (S) +520 (P)=2220 |
- |
2120 |
1545 (L)+685 (P)=2230 |
|
Масса, кг |
400 |
450 |
250 |
|
- |
386 |
460 |
|
Срок службы, лет |
|
7 |
5 |
5 |
- |
5 |
5 |
Общий вид МКА «Кондор-Э» показан на рис. 4. При его разработке был принят ряд технических решений, предусматривающих гибкое цифровое управление положением полосы съёмки, параметрами сигнала для оптимизации электропотребления в зависимости от циклограммы съемки. В РСА использована легкая гибридная зеркальная антенна (ГЗА) с диаметром рефлектора 6 м и эффективной площадью 28 м2. Она установлена на поворотном узле, обеспечивающем выбор направления съемки и перенацеливание по углу места. Поворотный облучатель в виде многорупорной антенной решетки обеспечивает в горизонтальном положении, как на рис. 4 работу с ГГ поляризациями с электронным сканированием луча в пределах ±2° по азимуту для прожекторного режима. При переводе облучателя в вертикальное положение обеспечивается работа с ВВ поляризациями со сканированием по углу места для оперативного перенацеливания полосы съемки, а также в обзорном режиме и режиме Скансар.
Рис. 4. Общий вид малого космического аппарата «Кондор-Э» с раскрытой антенной РСА.
С помощью цифрового формирователя программируется длительность зондирующих импульсов от 5 до 17 мкс при полосе ЛЧМ-сигнала 30, 50 и 200 МГц. Применены современные методы уменьшения помех, вызванных неоднозначностью сигналов по дальности и азимуту. С этой целью предусмотрены наборы зондирующих сигналов с разной начальной фазой и направлением ЛЧМ. Предусмотрены также специальные режимы и сигналы для текущего контроля приемопередающего тракта и калибровки РСА. Для исключения перегрузок приемника при сильных сигналах используются безынерционные ограничители в УПЧ и цифровое АРУ в стробе приема, управляющее аттенюаторами в приемнике. Эти устройства позволяет использовать в приборе преобразования информации 4-разрядный АЦП для уменьшения потока данных, передаваемых на Землю.
Освоение этого отечественного средства радиовидения, изучение возможностей зондирования в S-диапазоне волн в сравнении с архивными зарубежными снимками X-, C- и L-диапазонов, использованными в текущих работах по применению методов ДЗЗ, является важной задачей на ближайшее время. Полезна также организация совместных экспериментов с зарубежными РСА.
3. НАУЧНЫЕ ЭКСПЕРИМЕНТЫ В РАМКАХ ЛЕТНЫХ ИСПЫТАНИЙ
И ЭКСПЛУАТАЦИИ МКА «КОНДОР-Э»
За прошедший период в ОАО «Концерн «Вега» рамках НИОКР был создан теоретический задел по развитию космических систем РЛН, который требует экспериментального подтверждения. В ходе летных испытаний МКА «Кондор-Э» ожидается не только подтверждениие соответствия характеристик РСА техническому заданию, но и проведение научных экспериментов по отработке элементов АФАР и гибридных АФАР-зеркальных антенн, оценить возможности построения сквозной геоинформационной аэрокосмической системы, в том числе и с использованием пассивных приемных РСА датчиков на БЛА, доказать перспективность зондирования в S-диапазоне волн для решения задач двойного применения.
Основные задачи, позволяющие получить экспериментальное данные для совершенствования космических РСА в ходе испытаний и эксплуатации МКА «Кондор-Э»:
1. Исследование методов межвитковой интерферометрии для построения карт рельефа и дифференциальной интерферометрии для измерения просадок почвы со сравнением с архивными материалами съемок в X-, C- и L-диапазонах волн, оценкой точности измерений, в том числе по районам нефтепромыслов (см. Труды конференций ИРЭ РАН и ИКИ РАН).
2. Расширение полосы обзора с приближением к надиру, а также в области больших углов падения (до 80° при максимальном повороте антенны по крену и маневре МКА) с подавлением помех азимут/дальностной неоднозначности сигналов путем изменения направления ЛЧМ, случайной манипуляцией фазы зондирующего сигнала и другими методами.
3. Экспериментальное исследование методов индикации и измерения радиальной и тангенциальной составляющих скорости движущихся целей с применением алгоритмов пространственно-частотной фильтрации, фокусированного синтеза, двухлучевого зондирования.
4. Проверка возможности получения изображения в режиме скошенного переднебокового обзора (в пределах возможного разворота МКА по курсу, тангажу и углов сканирования ДНА).
5. Получение экспериментальных данных для оценки возможностей многопозиционной аэрокосмической информационной системы мониторинга земной поверхности, в том числе с поляриметрической съемкой с помощью приемников, установленных на воздушном шаре-зонде.
6. Набор экспериментальных данных по сигнатурам групповых объектов (подвижной техники, самолетов, судов), в том числе с применением методов многомасштабного синтеза РЛИ.
7. Уточнение характеристик отражения морской поверхности при квазизеркальном зондировании, получение уникальных научных данных по измерению поля уровня морской поверхности для решения задач по предупреждению опасных волновых явлений [3].
8. Оценка предельных характеристик с получением субметрового разрешения по азимуту (в полном угла сканирования антенны ±2°) и поперек линии пути (по неподвижным объектам с применением межвитковой интерферометрии).
9. Проведение поисковых экспериментов по решению важной гуманитарной задачи – обнаружения металлических и пластиковых мин мелкого заглубления методом бистатического поляриметрического зондирования в дециметровом S-диапазоне волн с субметровым пространственным разрешением.
Схема проведения экспериментов по бистатическому зондированию приведена рис. 5. Дополнительное оборудование, включающее две пары (Г- и В-поляризаций) приемных каналов, запоминающие устройства, а также передающий модуль для настройки и контроля, размещают на воздушном шаре-зонде, одну пару приемников помещают в гондоле, а другую пару – внизу на тросе или штанге длиной 4…6 м для интерферометрических измерений. Используют два варианта взаимного расположения космического РСА и приемников (в одной плоскости или с отличием ракурсов облучения и приема): согласное (А) – для большинства экспериментов и оппозитное (B) – для измерения поля уровня морской поверхности по зеркальному отражению (п. 7).
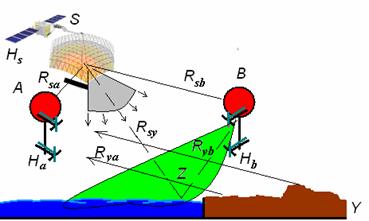
Рис. 5. Варианты геометрии бистатического зондирования.
Расчетные параметры обзора: высота орбиты КА Hs=500 км, высота приемников HA=HB=2,5 км; углы визирования следа шара-зонда gA =45° и gB =50°. Для согласного наблюдения приращение наклонной дальности от момента прихода прямого сигнала от РСА с дальностью RSA равно
![]() ,
,
где RSY и RYA – наклонные дальности от РСА до точки на Земле и от нее до приемников:
Для оппозитного наблюдения имеем замену в формулах A на B. Зависимости параметров бистатического зондирования от удаления точки наблюдения Y от следа шара-зонда для обоих случаев приведены на рис. 6. Из них следует, что для выбранной высоты полета приемников задержка прихода отраженного сигнала относительно прямого сигнала составляет 16,7 мкс для согласного обзора и 10,7 мкс для оппозитного обзора. Это означает, что с учетом времени парализации от сильного сигнала (~2,5 мкс) длительность зондирующего импульса РСА в этих экспериментах не должна превышать 14 или 8 мкс. Длительность строба приема можно ограничить величиной 14 мкс для согласного обзора или 7 мкс для оппозитного обзора с задержкой на 27 или 10 мкс после переднего фронта прямого импульса. Объем информации на один приемный канал при оцифровке с тактовой частотой 250 МГц и 4-разрядном кодировании составит 30 (15) кбит на строку или (при частоте повторения 4 кГц) 112 (56) Мбит/с при длительности сеанса съемки не более 7 с (синхронизация от прямого сигнала).
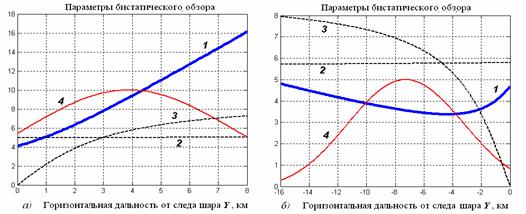
Рис. 6. Параметры бистатического обзора: а) согласный, б) оппозитный. 1 – приращение наклонной дальности от прихода прямого сигнала DR, км; 2 и 3– углы падения и отражения (град/10), 4 – коэффициент передачи по мощности - квадрат КУ антенны РСА (относит. ед).
Требуемое технологическое оборудование для проведения экспериментов может создаваться на базе макетов функциональных узлов (модулей), разрабатываемых для перспективных РСА S-диапазона волн с антеннами типа АФАР и ГАФАР ЗА. В качестве прототипа аппаратуры может рассматриваться модульный мобильный регистрирующий транспондер (ММРТ) с изменяемой конфигурацией, обеспечивающий калибровку РСА, снятие ДНА, измерение пространственного разрешения РСА во всех режимах, включая прожекторные. Для получения надежных результатов имитированная точечная цель должна иметь ЭПР не менее 10…20 м2. Пассивный (уголковый) отражатель с такой ЭПР будет иметь габаритные размеры (55…65 см), соизмеримые с заданным (и особенно – предельным) разрешением РСА, что внесет существенную погрешность в измерения разрешающей способности РСА. Структурная схема ММРТ как технологического экспериментального оборудования должна прорабатывается с учетом использования доступной покупной элементной базы (например, приемник прямого усиления на широкополосных усилителях или супергетеродинный приемник), простых технических решениях (раздельные антенны) и т.д.
Примерный состав ММРТ: приемные модули (ПрМ) – 4 шт., АЦП –2×4 шт., быстродействующее ЗУ с памятью ³500 Мб (для автономной работы) - 2×4 шт., передающий модуль – 1 шт., устройство синхронизации, управления и контроля (УСУК), монитор оператора (ноутбук) и источник вторичного питания – по 1 шт. Первичное питание от аккумулятора 12 (или 27) В. При работе в режиме транспондера в сигнал, подаваемый на ПрМ, вводится фазовая манипуляция от строке к строке по псевдослучайной последовательности. Состав аппаратуры и параметры обзора уточняются в процессе разработки ММРТ. Целесообразна разработка не менее трех комплектов ММРТ, один или более, в уменьшенной комплектации (два ПрМ) – для работы в составе измерительного полигона. Два комплекта используют в экспериментах по бистатическому обзору с КА, синтезу инверсной апертуры по подвижным объектам, работе РСА с базированием на шаре-зонде для получения дополнительной информации о наземных целях при различных ракурсах облучения, а также – в качестве линейки из 8-ми приемных модулей для отработки АФАР и ГАФАР ЗА.
заключение
Опубликованные в печати радиолокационные снимки с высоким разрешением (до 2 м), полученные с помощью самолетных и космических РСА в разных (Ku, X, L) диапазонах волн и при разном числе наблюдений, свидетельствуют о большой изменчивости изображений (сигнатур) групповых объектов (наземной техники, самолетов, судов, инженерных сооружений) при изменении ракурса съемки, угла места, поляризации РСА на передачу и прием. Надежная интерпретация получаемых данных требует набора статистики с использованием разных датчиков и режимов обработки снимков с вариацией когерентного и некогеренного накопления. В связи с этим основным исходным продуктом радиолокационной съемки становится несущие информацию об амплитуде и фазе комплексные изображения в координатах наклонная дальность/азимут, из которых можно получить остальные продукты, используя стандартные программные средства обработки РЛИ.
Ожидаемая информация радиолокационного зондирования в S-диапазоне волн с помощью РСА МКА «Кондор-Э» должна обязательно использоваться для сопоставительного анализа с имеющимися архивными материалами съемки другими датчиками, что позволит существенно продвинуть технологии ДЗЗ с получением важных результатов их практического использования, а также развития научно-технического задела для создания перспективных средств ДЗЗ.
Литература
1. Верба В.С., Неронский Л.Б., Поливанов С.С. Тенденции развития систем радиолокационного наблюдения космического базирования // Наукоемкие технологии. 2009. Т. 10. № 8. С.3‑9.
2. Верба В.С., Неронский Л.Б., Осипов И.Г., Турук В.Э. Радиолокационные системы землеобзора космического базирования. Научная серия «Системы мониторинга воздушного космического пространства и земной поверхности» редактор серии В.С. Верба – М.: Радиотехника, 2010. – 680 с.: илл.
3. А.Н.Жегалов. Актуальность и полнота радиолокационных данных как прагматические характеристики космических систем дистанционного зондирования Земли // Современные проблемы дистанционного зондирования Земли из космоса. ИКИ РАН, сборник научных статей, М.: ООО «Азбука-2000», 2009, вып. 6, том 1, с.151–159.
4. Справочные данные и дополнения по спутникам съемки / Ежегодник «Космическая съемка Земли. 2010–2011. Научно-техническое справочно-аналитическое издание. М: Радиотехника, 2010.
5. Петри Г. Российский спутник «Ресурс-ДК1»: альтернативный источник данных сверхвысокого разрешения. – Геоматика, №4, 2010.
6. Захарова Л.Н., Захаров А.И., Сорочинский М.В., Рябоконь Г.П., Леонов В.М. Совместный анализ данных оптических и радиолокационных сенсоров: возможности, ограничения и перспективы // Радиотехника и электроника, 2011, том 56, №1, с. 5–19.
7. Spaceborne Imaging Radar. JPL. SIRCE03: Educational CD-ROM PC Special Edition With Companion World Wide. Web Site http://southport.jpl.nasa.gov/companion.
8. Верба В.С., Неронский Л.Б., Осипов И.Г., Турук В.Э. Радиолокационное зондирование Земли в дециметровых диапазонах волн // Аэрокосмический курьер. 2009. № 6 (66). С.50‑52.
9. Osipov I.G., Neronskiy L.B., Turuk V.E., Andrianov V.I., Verba V.S., Korolev A.V., Kulikovsky M.G., Pushkov D.V., Janushevsky G.D., Feyzulla N.M., Panteleev V.A. Synthetic Aperture Radar for Earth and Sea Surface Observations // Proc. of EUSAR'2004, Ulm, Germany. May 24–28 2004. V. 1. P. 59‑62.
10. Osipov I.G., Neronskiy L.B., Andrianov V.I., Verba V.S., Kozlov K.V., Kurenkov V.N., Pushkov D.V. Calculated Performance of SAR for High Orbit Spacecraft Using Nuclear Power Supply // Proc. of EUSAR'2006, Dresden, Germany. May 16–18 2006.