ОЦЕНКА ЭФФЕКТИВНОСТИ АЛГОРИТМОВ ПОЛЯРИЗАЦИОННОЙ
СЕЛЕКЦИИ НЕПОДВИЖНЫХ
НАЗЕМНЫХ ОБЪЕКТОВ
Р. Н. Акиншин 1, А. В. Хомяков 2, В. Л. Румянцев 2, С. А. Курбатский 2
1 Секции прикладных проблем при Президиуме РАН
2 ОАО Центральное конструкторское бюро аппаратостроения
Получена 21 апреля 2013 г.
Аннотация. В работе предложено решающее правило обнаружения радиолокационных целей на фоне подстилающей поверхности по поляризационным параметрам. Проведена сравнительная оценка эффективности обнаружения с помощью макета поляриметрической РЛС 8 мм диапазона длин волн.
Ключевые слова: радиолокационное обнаружение целей, радиолокационные комплексы, поляризационная матрица рассеяния, алгоритмы поляризационной селекции
Abstract. A decision rule of detecting a radar target against underlying terrain by polarization parameters was offered in the article. Comparative estimation of detection efficiency with the help of an 8- mm wave band polarimetric radar model was conducted.
Keywords: target radar detection, radar systems, dissipation polarimetric matrix, algorithms of polarization discrimination.
Вопросам радиолокационного обнаружения различных целей на фоне подстилающей поверхности посвящено значительное число работ [1-3]. Движение указанных целей приводит к преобразованию спектра зондирующего сигнала вследствие эффекта Доплера. Помимо эффекта Доплера к изменению спектра приводит и наличие вращающихся и вибрирующих элементов целей, а также наличие элементов с нелинейными характеристиками на их поверхности.
Технически задача выделения движущихся целей решается достаточно просто с помощью доплеровской фильтрации. Отсутствие доплеровских составляющих в спектре радиолокационного сигнала, отраженного от цели, приводит к необходимости использования для обнаружения поляризационных различий сигналов.
Современные радиолокационные комплексы в большинстве своем не учитывают тонкую структуру отраженного радиолокационного сигнала при обработке. Как показано в [1], математическое моделирование алгоритмов поляризационной селекции дает приблизительную оценку выигрыша от применения поляризационной обработки в ортогональном базисе. Представляет определенный интерес оценка эффективности обнаружения наземных целей с флуктуирующими поляризационными характеристиками (ПХ) на фоне подстилающей поверхности.
Предположим, что амплитуды и фазы элементов поляризационной матрицы рассеяния являются стационарными, стационарно-связанными процессами, причем фазу можно считать равномерно распределенной в интервале [0; 2p], а амплитуду - нормально распределенной случайной величиной с нулевым математическим ожиданием (МО).
В случае излучения сигнала с фиксированной поляризацией, сигнал на входе двухканального приемника может быть представлен матрицей
 , (1)
, (1)
или, в случае цифровой обработки сигналов, для i-го элемента выборки, i = 1, 2, …, N + 1
 . (2)
. (2)
Опыты показывают, что ПХ подстилающей поверхности остаются практически стационарными для ограниченного числа соседних элементов разрешения. Следовательно, если произвести усреднение шумов по 2N соседних элементов по дальности, а затем сдвигать волновое окно на один элемент разрешения, то по изменению ПХ можно будет выделить сигнал от цели, находящейся в некотором N-ом окне.
В качестве параметра для обнаружения выберем матрицу когерентности J
 (3)
(3)
где ![]() – ожидаемый сигнал в i элементе разрешения, i = N + 1 – элемент разрешения, соседний с N (анализируемым)
элементом; * – знак комплексного сопряжения; Т – знак
транспонирования; S(i)·S*(i)
– скалярное произведение векторов. Справедливо соотношение [2]:
– ожидаемый сигнал в i элементе разрешения, i = N + 1 – элемент разрешения, соседний с N (анализируемым)
элементом; * – знак комплексного сопряжения; Т – знак
транспонирования; S(i)·S*(i)
– скалярное произведение векторов. Справедливо соотношение [2]:
 (4)
(4)
Для помехи можно считать матрицу J стационарной, тогда n2det(J) = const и в случае нормального распределения ПХ МО может быть представлено как
![]() (5)
(5)
Из (4) и (5) с учетом введенных выше допущений получим
 (6)
(6)
Таким образом, параметр W зависит от мощности и ПХ принимаемого сигнала и матрицы когерентности J, причем для отражений от местности его можно считать постоянным. Выясним, как использовать W для решения задачи поляризационного обнаружения МНЦ на фоне подстилающей поверхности.
Введем порог Wпор, при превышении которого (W > Wпор) принимается решение о наличии цели в N элементе волнового окна. Зададим вероятность ложной тревоги РF, а вероятность обнаружения PD и определим значение Wпор, обеспечивающее требуемые вероятности.
Матрица когерентности i элемента разрешения вычисляется через параметры Стокса и матрицы Паули. После несложных преобразований получим следующее выражение параметра [1]
 (7)
(7)
где g – отношение сигнал шум; pЦ и pП – степень поляризации полезного сигнала и помехи [1].
Для
постоянных pЦ и pП
выражение  , тогда (7) можно записать как
, тогда (7) можно записать как
![]() (8)
(8)
Параметры a и W можно выразить через сферический угол между точками, соответствующими центрам областей ПХ полезного сигнала и помехи
 ,
,  . (9)
. (9)
Анализ (9) показывает, что чем больше поляризационные различия (cos(q) ® 0), тем при меньшем g может быть достигнуто значение параметра W, обеспечивающее эффективное обнаружение цели на фоне местности. Запишем усредненную матрицу когерентности
 . (10)
. (10)
Из (10) видно, что матрица J для N + 1 элемента разрешения волнового окна вычисляется как сумма предыдущего значения JN и усредненной матрицы когерентности по волновому окну, где значения Si·Si*T = Ji и Sj·Sj*T = Jj
 . (11)
. (11)
Следующим шагом после описания методики расчета всех величин, входящих в (9), нетрудно определить значение Wпор, обеспечивающее требуемые вероятности правильного обнаружения и ложной тревоги. Как показано в [2], в случае, если цель в волновом окне отсутствует, то вероятность ложной тревоги запишется в виде
![]() . (12)
. (12)
В случае
если в рассматриваемом элементе разрешения есть цель, то вероятность правильного
обнаружения запишется как
 . (13)
. (13)
Таким
образом, предложенная методика обеспечивает возможность вычисления порога Wпор, стабилизирующего вероятность правильного обнаружения
цели и ложных тревог в зависимости от поляризационных параметров полезного
сигнала и помехи. Причем координаты точек поляризации на сфере Пуанкаре не
вычисляются, а достаточно определить степень поляризации принимаемых волн, отношение
сигнал/помеха и сферический угол q.
При проведении натурного эксперимента, был использован макет двухканальной по поляризации когерентной РЛС 8 мм диапазона длин волн, реализующей поляризационную обработку отраженных радиолокационных сигналов в ортогональном базисе.
Когерентное накопление осуществлялось в горизонтальном канале и его результаты трансформировались в матрицы размерностью n ´ m по основной и кроссовой компонентам.
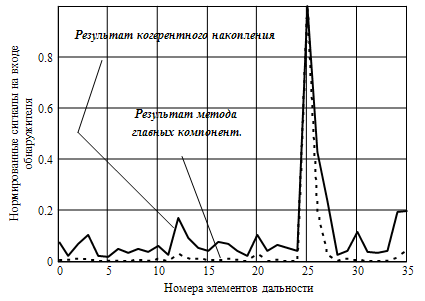
Рис. 1. Соотношение эффективности когерентного накопления
отраженных РЛ сигналов и метода главных компонент для борта
автомобиля
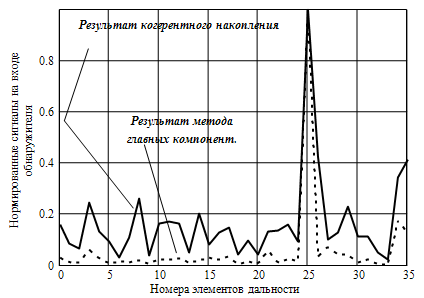
Рис. 2. Соотношение эффективности когерентного накопления
отраженных РЛ сигналов и метода главных компонент для автомобиля,
лоцируемого в лоб
На рис. 1 и 2 приведен сравнительный анализ результатов когерентного накопления и использования метода главных компонент [2, 5] при следующих условиях: анализ отраженного сигнала проведен для 35 элементов дальности; накопление велось по 300 отсчетам; подстилающая поверхность представляла собой сухую траву и мелкий кустарник. Погодные условия: пасмурно, температура 14-160 С. В качестве целей использован неподвижный автомобиль ЗИЛ-131 под разными ракурсами.
Анализ рисунков, отражающих результаты экспериментальной оценки алгоритмов поляризационной селекции неподвижных наземных объектов, показывает, использование предложенного алгоритма расчета порога обнаружения позволяет добиться такой же вероятности ложных тревог, что и для одноканального байесовского обнаружителя при отношении сигнал - шум меньшем на 3 - 6 дБ.
1. Акиншин Н.С., Быстров Р.П., Румянцев В.Л., Соколов А.В. Миллиметровая радиолокация: методы обнаружения негауссовских сигналов / под ред.Р.П. Быстрова. – М: Радиотехника, 2010. – 528 с.
2. Джули Д. Поляризационное разнесение в радиолокации / ТИИЭР. – 1986. – т. 74. – N 2. – С. 6-34.
3. Теория обнаружения сигналов П.С. Акимов, П.А. Бакут, В.А.Богданович/ под ред. П.А. Бакута. – М.: Радио и связь, 1984. – 440 с.
4. Николаев В.А., Румянцев В.Л. Оценка поляризационного состояния сигналов, отраженных от малоразмерных наземных объектов / Оборонная техника. – 1995. – №8. – С.33-34.
5. Репин В.Г., Тартаковский Т.П. Статистический синтез при априорной неопределенности и адаптация информационных систем. – М.: Сов. Радио, 1977. – 432 с.