УДК 621.396.96
Особенности угломерно-дальномерного метода определения местоположения цели
в просветных бистатических радиолокаторах
Ф. Н. Ковалев, В.В. Кондратьев
Нижегородский государственный технический университет им. Р.Е. Алексеева
Получена 28 марта 2014 г.
Аннотация. Рассмотрена задача определения координат объекта в просветной двухкоординатной бистатической радиолокационной системе с измерениями доплеровской частоты и направления прихода рассеянного сигнала. Исследованы случаи равномерного прямолинейного движения цели, маловысотной, а также маневрирующей цели. Даны рекомендации по начальной оценке координат в системе с дополнительными измерениями угла места (в трехкоординатном радиолокаторе). В заключительной части работы для определения дальности цели в просветных бистатических системах предложено использовать фазовый метод, в котором зондирующий сигнал состоит из двух и более гармонических колебаний с близкими частотами.
Ключевые слова: угломерно-дальномерный метод, бистатическая радиолокационная система, просветная радиолокация, приближенные зависимости доплеровской частоты и азимута от времени, маневрирующая цель, трехкоординатный просветный радиолокатор, фазовый двухчастотный метод измерения дальности.
Abstract: Problem of estimating the target coordinates from the Doppler frequency and azimuth in forward-scattering bistatic radar is considered. The cases of uniform rectilinear motion of target, low-flying target and maneuvering target are investigated. Recommendations for estimating the target coordinates in the radar system with additional measurements of elevation angle (in 3D system) are given. In the final part of the article phase dual frequency range measurement method in forward-scattering bistatic radar is considered.
Keywords: estimation the target location, bistatic radar system, forward-scattering radar, approximate dependence of the Doppler frequency and azimuth of the time, maneuvering target, three dimension forward-scattering radar system, phase dual frequency range measurement method.
Введение
В просветных радиолокационных системах (РЛС) используется явление повышения интенсивности рассеянного на цели излучения при ее нахождении между передатчиком и приемником [1, 2]. Просветные РЛС способны успешно обнаруживать воздушные объекты, выполненные с применением технологии Stealth, и маловысотные цели [3, 4].
Просветные радиолокаторы могут быть сформированы из монохроматического передатчика и приемника с амплитудным детектированием суммарного колебания, образуемого в результате интерференции радиоволны, рассеянной на цели, и более мощной прямой радиоволны от передатчика [4, 5, 6]. Координаты цели в радиолокаторах находят по измерениям доплеровской частоты и направления прихода рассеянного сигнала.
В настоящей работе обсуждаются особенности угломерно-дальномерного метода [7, 8] определения местоположения цели в таких бистатических радиолокаторах. Применительно к совмещенным радиолокаторам этот метод также называют дальномерно-пеленгационным [9].
1. Схема просветной бистатической РЛС
На рис. 1 представлена
схема двухкоординатной бистатической РЛС. Элементы системы размещены в
плоскости xOy: приемник (Receiver) R расположен в начале системы координат (в точке О),
передатчик (Transmitter) T удален от него в направлении оси Ox на расстояние a, называемое базой. Цель движется в
плоскости xOy со скоростью ![]() ,
пересекая линию базы под углом ψ в точке
,
пересекая линию базы под углом ψ в точке ![]() ,
, ![]() , в момент времени τ;
, в момент времени τ; ![]() –
расстояние от передатчика до цели,
–
расстояние от передатчика до цели, ![]() – расстояние от цели до приемника. Угол φ
характеризует направление прихода рассеянного сигнала:
– расстояние от цели до приемника. Угол φ
характеризует направление прихода рассеянного сигнала:
x, y – координаты цели. Доплеровская частота рассеянного сигнала выражается в виде [7, 10]
λ – длина волны излучения
передатчика; t – время; ![]() – суммарная дальность цели.
– суммарная дальность цели.
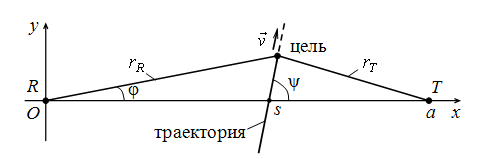
Рис. 1. Схема просветной бистатической РЛС на плоскости
Зона действия системы представляет собой узкую, вытянутую вдоль оси Ox область [4, 5], внутри которой можно принять
2. Угломерно-дальномерный метод
В бистатических РЛС местоположение цели находят угломерно-дальномерным методом по пересечению луча, исходящего из точки (0, 0) под углом φ, и эллипса с фокусами в пунктах (0, 0) и (a, 0) размещения приемника и передатчика и характеризуемого суммарной дальностью l [7, 8]. Координаты точки пересечения рассчитываются по формулам:
Поскольку в просветной РЛС определение
координат производится в непосредственной близости от линии базы (3), то для
расстояний ![]() ,
, ![]() , l и угла φ удобно иметь
приближенные представления:
, l и угла φ удобно иметь
приближенные представления:


Из (6), (7) следуют приближенные формулы расчета координат по значениям дальности l и угла φ:
В просветной системе с монохроматическим излучением суммарную дальность l можно найти из (2) интегрированием измеренной зависимости f(t):
 ,
(9)
,
(9)
где ![]() –
значение дальности в момент
–
значение дальности в момент ![]() начала интегрирования.
Аналогичный подход – с оценкой дальности по интегрированию доплеровской частоты
– в спутниковых системах радионавигации получил название интегрального доплеровского
метода [11].
начала интегрирования.
Аналогичный подход – с оценкой дальности по интегрированию доплеровской частоты
– в спутниковых системах радионавигации получил название интегрального доплеровского
метода [11].
В момент ![]() пересечения целью линии базы суммарная
дальность принимает минимальное значение
пересечения целью линии базы суммарная
дальность принимает минимальное значение ![]() ,
соответственно доплеровская частота переходит нулевой уровень
,
соответственно доплеровская частота переходит нулевой уровень
С учетом этого (9) принимает вид [12]:
Момент τ в (11) определяется по измерениям доплеровской частоты из условия (10) или по измерениям угла φ из условия
вытекающего непосредственно из определения угла φ (1) и рис. 1.
Из (11) видно, что предложенный в [12] подход к оценке суммарной дальности формально не позволяет отслеживать траекторию до пересечения целью линии базы. В связи с этим актуальным является поиск приближенных методов оценки местоположения цели для характерных случаев ее движения.
3. Формулы расчета координат неманеврирующей цели
Узость зоны действия и
непродолжительное время пребывания цели в ней приводят к широкому использованию
в просветных бистатических системах модели движения цели с постоянной скоростью
![]() и углами ψ близкими к 90° [4,
5, 13 и др.]:
и углами ψ близкими к 90° [4,
5, 13 и др.]:
![]() ,
, ![]() ,
, ![]() –
величина скорости,
–
величина скорости, ![]() .
.
В этом случае зависимости (1), (2) угла и доплеровской частоты от времени с учетом (6), (7) принимают вид:
Из (15), (16) следует, что на небольших удалениях цели от линии базы доплеровская частота и угол являются квазилинейными функциями времени со скоростями изменения:
Решая систему уравнений (15), (16) относительно координат цели, нетрудно получить для них выражения через измерения доплеровской частоты и угла:

или
В (20) скорости изменения доплеровской частоты и угла определены в соответствии с (15), (17) и (16), (18) через измерения f(t) и φ(t):
Формулы (20) получаются и из (13), (14) на основе совместного решения уравнений (17), (18). Кроме того, выражения (19), (20) следуют непосредственно из (8), где l(t) вычисляется по (11) с использованием линейной зависимости f(t) (15), (17):
 или
или ![]() .
.
Момент τ в уравнениях (19) ÷ (22) можно определить из условий (10), (12). Очевидно, что при квазилинейном характере зависимостей f(t) и φ(t) для этого достаточно двух измерений доплеровской частоты или угла, выполненных в разные моменты времени.
На практике, для уменьшения влияния случайных ошибок измерений, целесообразно проводить аппроксимацию измеренных функций f(t) и φ(t) полиномами первой степени [13, 14]:
коэффициенты которых ![]() ,
, ![]() и
и ![]() ,
, ![]() определяются
методом наименьших квадратов по нескольким оценкам доплеровской частоты f и угла φ. Тогда согласно (10),
(12) момент τ пересечения целью линии базы можно найти следующим образом:
определяются
методом наименьших квадратов по нескольким оценкам доплеровской частоты f и угла φ. Тогда согласно (10),
(12) момент τ пересечения целью линии базы можно найти следующим образом:
или
Подстановка в (19) или в (20) значения τ, найденного по (25) или (26), дает возможность определять координаты цели на протяжении всего времени наблюдения, включая начальные моменты.
Следует отметить, что
коэффициенты ![]() и
и ![]() полиномов
(23), (24) имеют размерность скоростей изменения доплеровской частоты и угла и
могут непосредственно использоваться в (20) в качестве их оценок. Так, если
значение f(t) определено по (23), и по тем же коэффициентам
полиномов
(23), (24) имеют размерность скоростей изменения доплеровской частоты и угла и
могут непосредственно использоваться в (20) в качестве их оценок. Так, если
значение f(t) определено по (23), и по тем же коэффициентам ![]() и
и ![]() рассчитан
момент τ (25), то из (21) следует
рассчитан
момент τ (25), то из (21) следует
 .
.
В качестве примера на
рис. 2 показаны рассчитанные по результатам 1000 независимых численных
экспериментов графики математического ожидания ![]() (штриховая линия) и
среднеквадратичного отклонения
(штриховая линия) и
среднеквадратичного отклонения ![]() (пунктирная линия) ошибки определения координаты x цели по формуле (19) в зависимости от
времени наблюдения t.
Сплошной линией показан график полной ошибки
(пунктирная линия) ошибки определения координаты x цели по формуле (19) в зависимости от
времени наблюдения t.
Сплошной линией показан график полной ошибки ![]() . Рассмотрена система с
. Рассмотрена система с ![]() ,
, ![]() . Цель
двигалась со скоростью
. Цель
двигалась со скоростью ![]() по траектории с
по траектории с ![]() ,
, ![]() .
.
Рис. 2. Точность определения координаты x неманеврирующей цели
Зона действия системы
условно ограничивалась значениями ![]() ; соответственно значение
ординаты в начале наблюдения (в момент
; соответственно значение
ординаты в начале наблюдения (в момент ![]() ) было
) было ![]() Полагалось, что измерения доплеровской
частоты f и угла φ выполняются независимо
и одновременно с интервалом
Полагалось, что измерения доплеровской
частоты f и угла φ выполняются независимо
и одновременно с интервалом ![]() ; соответственно наблюдение
начиналось (
; соответственно наблюдение
начиналось (![]() ), когда было сделано по одному измерению f и φ. Текущее время t и число n пар одновременно произведенных измерений частоты и угла связаны
равенством
), когда было сделано по одному измерению f и φ. Текущее время t и число n пар одновременно произведенных измерений частоты и угла связаны
равенством ![]() или
или ![]() . Цель пересекала линию базы
спустя 20 с после начала наблюдения (
. Цель пересекала линию базы
спустя 20 с после начала наблюдения (![]() ).
).
Ошибки измерений f и φ распределены по нормальному закону со среднеквадратичными
отклонениями ![]() частоты и
частоты и ![]() угла и
нулевыми математическими ожиданиями.
угла и
нулевыми математическими ожиданиями.
Коэффициенты
аппроксимирующих полиномов (23), (24) находились по ![]() последним
на текущий момент t
измерениям доплеровской частоты и
последним
на текущий момент t
измерениям доплеровской частоты и ![]() последним измерениям
угла соответственно. До момента
последним измерениям
угла соответственно. До момента ![]() использовались все
имеющиеся измерения. Аппроксимированные значения частоты и угла в центре
интервала аппроксимации
использовались все
имеющиеся измерения. Аппроксимированные значения частоты и угла в центре
интервала аппроксимации ![]() обеспечивали лучшую точность
по сравнению с его концами. Поэтому в (19) подставлялись значения
обеспечивали лучшую точность
по сравнению с его концами. Поэтому в (19) подставлялись значения ![]() и
и ![]() из
центра интервала, соответствующие моменту времени (
из
центра интервала, соответствующие моменту времени (![]() ).
).
Увеличение числа N оценок доплеровской частоты и угла
для аппроксимации приводило к снижению ![]() в рассматриваемом случае. Однако использование
больших N вряд ли оправдано, поскольку при
отклонении курса ψ от 90°
может приводить и к заметному росту
в рассматриваемом случае. Однако использование
больших N вряд ли оправдано, поскольку при
отклонении курса ψ от 90°
может приводить и к заметному росту ![]() и
и ![]() .
.
В рассмотренном примере относительные ошибки измерений угла φ существенно превосходили относительные ошибки измерений доплеровской частоты:
Поэтому момент τ определялся по (25). Поскольку точность оценки τ была максимальной в момент пресечения целью оси Ox [15], то после пересечения оси Ox значение τ фиксировалось.
Точность определения координаты y цели была заметно лучше, чем координаты x, и графики ошибок y здесь не приводятся.
Проведенные исследования
показали возможность получения высокой точности определения координат по
приближенным формулам (19), (20) уже в самом начале наблюдения за целью. Для
сравнения на рис. 2 штрихпунктирной линией показан график потенциальной
точности определения координаты x, рассчитанный по матрице Фишера для случая движения цели ортогонально
оси Ox [16] (определению подлежали
координаты x, y и скорость ![]() ; скорость
; скорость ![]() полагалась известной,
полагалась известной, ![]() ).
).
Рост ошибки ![]() в середине интервала наблюдения
объясняется повышенной чувствительностью бистатической системы к погрешностям измерений
f и φ в окрестности линии базы [8]. Оценки координат здесь
можно получать экстраполированием оценок, выполненных до пересечения линии базы.
в середине интервала наблюдения
объясняется повышенной чувствительностью бистатической системы к погрешностям измерений
f и φ в окрестности линии базы [8]. Оценки координат здесь
можно получать экстраполированием оценок, выполненных до пересечения линии базы.
На участке после
пересечения целью линии базы дискретное интегрирование доплеровской частоты согласно
(11) и последующая оценка координат по (4) приводили практически к тем же
результатам, что показаны на рис. 2. Отличие состояло в отсутствии смещений
оценок координат. При этом, как и ранее, измерения угла φ предварительно
аппроксимировались линейным полиномом (24) на временном интервале длительности
![]() , а последующий расчет координат выполнялся
в центре интервала – в момент (
, а последующий расчет координат выполнялся
в центре интервала – в момент (![]() ).
).
При небольших отклонениях
ψ от 90° точность определения координат по приближенным формулам (19) на
начальных участках также оставалась высокой. Более того возможность оценки
координат сохранялась при курсах ![]() .
.
Уточнить полученные
оценки параметров траектории неманеврирующего объекта (s, τ, ![]() ,
, ![]() или s, τ, v, ψ) или текущие координаты x(t), y(t) можно на следующем этапе обработки более
сложными алгоритмами, например, по методу максимального правдоподобия [6,
16,
17].
или s, τ, v, ψ) или текущие координаты x(t), y(t) можно на следующем этапе обработки более
сложными алгоритмами, например, по методу максимального правдоподобия [6,
16,
17].
Следует отметить, что формулы (20) представляют интерес не только для просветных бистатических, но и для многопозиционных РЛС с измерениями доплеровских частот рассеянного сигнала в пространственно разнесенных приемниках. В них величина ω может находиться по разности частот в приемниках [17, 18].
4. Расчет координат маневрирующей цели
Приближенные формулы оставались пригодными только при небольшом отличии законов изменения координат от линейного (13), (14). Поэтому определение координат маневрирующей цели в бистатических просветных системах имеет свои особенности и требует отдельного рассмотрения.
Простейшей моделью
движения маневрирующей цели в просветной системе является движение с постоянным
ускорением ортогонально линии базы (![]() ) [19]:
) [19]:
![]() ,
, ![]() ,
,
где![]() – координата y в момент начала наблюдения, а
мгновенная скорость v
и ускорение w определяются
через коэффициенты
– координата y в момент начала наблюдения, а
мгновенная скорость v
и ускорение w определяются
через коэффициенты ![]() и
и ![]() как
первая и вторая производная от y(t), т.е.
как
первая и вторая производная от y(t), т.е.
![]() ,
, ![]() .
.
На рис. 3 показаны
графики точности определения координаты x цели по формуле (19), построенные по результатам 1000
численных экспериментов для условий приведенного выше примера (рис. 2). Отличие
состояло в ускорении объекта: ![]() вместо
вместо ![]() принятого ранее для рис. 2. В этом случае
момент τ пересечения целью линии базы имел значение 18,3 с.
принятого ранее для рис. 2. В этом случае
момент τ пересечения целью линии базы имел значение 18,3 с.
Рис. 3. Точность определения координаты x маневрирующей цели
Из рис. 3 видно, что движение цели с ускорением приводило к увеличению систематических ошибок определения координат как до, так и после пересечения целью линии базы. Основной причиной этого является отличие законов изменения доплеровской частоты f и угла φ от линейных (15), (16).
Уменьшения
систематических ошибок определения координат после пересечения целью линии базы
можно, как и в случае неманеврирующей цели, путем дискретного интегрирования
оценок доплеровской частоты по (11) и оценке координат по (4). Так, для примера
на рис. 3 интегральный подход (4), (11) обеспечивал ![]() . При этом подход на основе
приближений (19) и подход (4), (11) приводили к совпадению графиков среднеквадратичного
отклонения на рис. 3 в области
. При этом подход на основе
приближений (19) и подход (4), (11) приводили к совпадению графиков среднеквадратичного
отклонения на рис. 3 в области ![]() .
Как и ранее, нахождение координат в экспериментах для рис. 3 производилось в
центре интервала аппроксимации – в момент (
.
Как и ранее, нахождение координат в экспериментах для рис. 3 производилось в
центре интервала аппроксимации – в момент (![]() ).
).
До пересечения целью линии базы определение координат цели с уменьшением систематических ошибок возможно по (4), (11) при помощи экстраполяции измерений доплеровской частоты полиномами более высоких, чем первая, степеней [14]. (Экстраполяция линейным полиномом приводит к ранее полученной формуле (19) и результатам, показанным на рис. 3.) Однако использование полиномов второй и более высоких степеней резко повышает дисперсию ошибок определения координат, что делает такие оценки малоэффективными [14, 19].
Восстановить траекторию цели до линии базы можно ретроспективно (с обратным отсчетом времени), также угломерно-дальномерным методом с непосредственным интегрированием доплеровской частоты (11).
Получаемые с ретроспективой оценки целесообразно использовать на следующем этапе обработки для уточнения координат после момента τ, в частности – на небольшом удалении от оси Ox, где точность их определения наиболее низкая [8]. При этом возможно применение метода максимального правдоподобия [11, 20] с начальным приближением, найденным по ретроспективным оценкам.
5. Влияние высоты полета цели
В просветных РЛС влияние
высоты полета цели на точность определения плоскостных координат x, y будет слабым при движении цели с курсами ψ близкими
к 90°. Основная причина этого – слабая зависимость доплеровской частоты от высоты
полета h. Действительно, для малых y (3) и малых высот ![]() по аналогии с (5), (6) можно записать:
по аналогии с (5), (6) можно записать:
 ,
, ![]() ,
,
 . (28)
. (28)
И если ![]() (
(![]() ), то последнее слагаемое в (28)
почти неизменно во времени, и производная от l(t)
дает такое же выражение для доплеровской частоты, как и в случае цели
двигающейся в плоскости xOy:
), то последнее слагаемое в (28)
почти неизменно во времени, и производная от l(t)
дает такое же выражение для доплеровской частоты, как и в случае цели
двигающейся в плоскости xOy:
 . (29)
. (29)
В частности, при ![]() из (29) получается (15).
из (29) получается (15).
Так, для рассмотренного
на рис. 2 примера, изменение высоты h в пределах 0 ÷ 2 км
практически не влияло на полученные оценки точности определения координат x, y. И графики, выполненные для ![]() (рис.
2) и
(рис.
2) и ![]() практически совпадали.
практически совпадали.
Отклонение курса ψ
до ![]() на высоте
на высоте ![]() при
прочих равных условиях могло увеличить значение полной ошибки
при
прочих равных условиях могло увеличить значение полной ошибки ![]() , приведенное на рис. 2, примерно на
30 %.
, приведенное на рис. 2, примерно на
30 %.
Следует отметить, что в
случае движения цели на высоте (![]() ) с курсом ψ
существенно отличным от 90° момент перехода доплеровской частоты через нуль
может отличаться от фактического момента пролета цели над осью Ox. Поэтому оценки τ по (10) могут быть менее точными,
чем по (12), даже при относительно малых ошибках измерения доплеровской частоты
(27).
) с курсом ψ
существенно отличным от 90° момент перехода доплеровской частоты через нуль
может отличаться от фактического момента пролета цели над осью Ox. Поэтому оценки τ по (10) могут быть менее точными,
чем по (12), даже при относительно малых ошибках измерения доплеровской частоты
(27).
Если в дополнение к углу
(азимуту) φ в просветной системе производить измерения угла места β, ![]() , то начальную оценку высоты
несложно пересчитать по формуле:
, то начальную оценку высоты
несложно пересчитать по формуле:
Уточнить полученные оценки плоскостных координат x, y и высоты h полета цели можно на следующем этапе обработки методом максимального правдоподобия.
6. Двухчастотный фазовый метод измерения суммарной дальности
Наряду с интегральным
доплеровским методом измерения суммарной дальности l в просветных бистатических и многопозиционных РЛС
может найти применение фазовый метод [7, 10], основанный на излучении двух
монохроматических колебаний с близкими частотами и сравнении фаз продетектированных
сигналов. Суть метода удобно пояснить с помощью упрощенных выражений для
излученных ![]() ,
, ![]() , принимаемых прямых
, принимаемых прямых ![]() ,
, ![]() и рассеянных (Scattered) на цели
и рассеянных (Scattered) на цели ![]() ,
, ![]() колебаний:
колебаний:
![]() ,
,
![]() ,
,


где ![]() ,
, ![]() – амплитуды излученных колебаний;
– амплитуды излученных колебаний; ![]() ,
, ![]() ,
, ![]() ,
, ![]() –
амплитуды принимаемых колебаний;
–
амплитуды принимаемых колебаний; ![]() ,
, ![]() и
и ![]() ,
, ![]() – частоты и начальные фазы излученных
колебаний;
– частоты и начальные фазы излученных
колебаний; ![]() ,
, ![]() –
сдвиги фаз при рассеянии (с учетом близости
–
сдвиги фаз при рассеянии (с учетом близости ![]() ,
, ![]() можно принять
можно принять ![]() );
); ![]() ,
, ![]() –
длина волны,
–
длина волны, ![]() – скорость распространения радиоволн,
– скорость распространения радиоволн,
![]() ,
, ![]() – доплеровские частоты, определяемые
согласно (2) как
– доплеровские частоты, определяемые
согласно (2) как
 .
.
В приемнике сигналы (31), (33) отфильтровываются от сигналов (32), (34). После этого выделение сигнала доплеровской частоты производится амплитудным детектированием суммарного колебания, образованного в результате интерференции рассеянной на цели радиоволны (33) (или (34)), и более мощной прямой радиоволны (31) (или (32)) от передатчика.
Фазы продетектированных после фильтрации колебаний являются разностями фаз прямых и рассеянных колебаний:
Соответственно разность фаз
продетектированных колебаний c учетом (35) и ![]() будет равна:
будет равна:
Откуда следует, что разность ![]() пропорциональна разности фаз продетектированных
колебаний:
пропорциональна разности фаз продетектированных
колебаний:
 ,
,
или
 .
.
Для устранения неоднозначности фазовых измерений дальности в пределах всей зоны действия просветной РЛС, как и ранее, по измерениям частот продетектированных колебаний и условию (10), или по измерению угла φ и условию (12) можно определять момент пересечения целью линии базы. После чего однозначность измерений обеспечивается непрерывным наблюдением за изменением разности фаз (36) и подсчетом целого числа циклов изменения разности фаз.
До пресечения целью линии
базы однозначная оценка дальности фазовым методом возможна в случае
равномерного и прямолинейного движения цели и предварительной оценки l по (11) с экстраполяцией измеренной
зависимости доплеровской частоты ![]() или
или ![]() .
.
Выводы
Проведенные исследования и, в частности, результаты числовых экспериментов выявили ряд важных особенностей применения угломерно-дальномерного метода в просветных бистатических радиолокаторах:
– В случае равномерного прямолинейного движения цели начальную оценку координат удобно производить по приближенным формулам (19) с предварительной аппроксимацией измерений доплеровской частоты f и угла φ. Точность оценки координат в начале наблюдения близка потенциальной, определяемой по матрице Фишера. Разновидность (19) – формулы (20) – может быть использована в просветных системах с разнесенным приемом, где определение угловой скорости осуществляется по разности частот принимаемого в разнесенных пунктах рассеянного сигнала.
– При движении цели со значительным ускорением (маневрирующая цель) определение ее местоположения возможно по формулам (4), (11) в реальном времени на участках траектории после линии базы и ретроспективно (с обратным отсчетом времени) – до линии базы. Ретроспективные оценки имеют значение для проверки гипотез о характере движения цели и для повышения точности определения ее координат после пересечения линии базы.
– Постоянная высота полета цели не является препятствием к использованию методов местоопределения, разработанных для двухкоординатной системы, если цель движется с курсами ψ не сильно отличными от 90°. Причина этого – слабое изменение доплеровской частоты с увеличением высоты полета. Дополнительные измерения угла места в бистатической системе позволяют найти начальную оценку высоты по (30).
Уточнить координаты цели, включая высоту, можно на следующем этапе обработки, например, методом максимального правдоподобия.
В статье затронут вопрос организации просветных систем с излучением нескольких гармоник и измерением суммарной дальности по соотношению фаз продетектированных колебаний. Фазовый метод измерения дальности, наряду с фазовым методом измерения угловых координат [21, 22], расширяет возможности по построению просветных систем и открывает перспективные направления их дальнейшего развития.
Литература
1. Ваганов, Р.Б. Основы теории дифракции / Р.Б. Ваганов, Б.З. Каценеленбаум. – М.: Наука, 1982. – 272 с.
2. Glaser, J.I. Bistatic RCS of complex objects near forward scatter // IEEE Trans. – 1985. – Vol. AES-21, №1. – P. 70 – 78.
3. Уфимцев, П.Я. Основы физической теории дифракции. – М.: БИНОМ, 2011. – 351 c.
4. Чапурский, В.В. Синтезированная теневая радиоголография в бистатической радиолокации // Радиотехника. – 2009. – № 3. – С. 52 – 69.
5. Бляхман, А.Б. Бистатическая эффективная площадь рассеяния и обнаружение объектов при радиолокации "на просвет" / А.Б. Бляхман, И.А. Рунова // Радиотехника и электроника. – 2001. – Т. 46, № 4. – С. 424 – 432.
6. Рындык, А.Г. Точность определения координат методом максимального правдоподобия при локации "на просвет" / А.Г. Рындык, С.Б. Сидоров, А.Б. Бляхман, Ф.Н. Ковалев // Радиотехника и электроника. – 1999. – Т. 44, № 12. – С. 1436 – 1440.
7. Теоретические основы радиолокации: учебное пособие для вузов / под ред. Я.Д. Ширмана. – М.: Сов. Радио, 1970. – 560 с.
8. Ковалев, Ф.Н. Точность местоопределения цели в бистатической радиолокационной системе // Радиотехника. – 2013. – № 8 – С. 56 – 59.
9. Сайбель, А.Г. Основы теории точности радиотехнических методов местоопределения. – М.: Оборонгиз, 1958. – 56 с.
10. Финкельштейн, М.И. Основы радиолокации. – М.: Сов. радио, 1973 – 496 с.
11. Информационные технологии в радиотехнических системах: учебное пособие для вузов / В.А. Васин, И.Б. Власов, Ю.М. Егоров [и др.]; под ред. И.Б. Федорова. – М.: МГТУ им. Баумана, 2003. – 672 с.
12. Радиолокационный способ определения параметров движения объекта: пат. 2133480 Рос. Федерация: МПК6 G01S3/72, G01S7/42 / Бляхман А.Б., Самарин А.В.; заявитель и патентообладатель Нижегород. науч.-исслед. ин-т радиотехники. – № 98101955/09; заявл. 02.02.98; опубл. 20.07.99.
13. Ковалев, Ф.Н. Определение параметров траектории цели в просветных бистатических радиолокационных системах // Системы управления и информационные технологии. – 2013. – № 4 (54) – С. 86 – 90.
14. Бляхман, А.Б. Метод определения координат движущихся целей при радиолокации "на просвет" / А.Б. Бляхман, Ф.Н. Ковалев, А.Г. Рындык // Радиотехника. – 2001. – № 1. – С. 4 – 9.
15. Ковалев, А.Н. Определение момента пересечения объектом отрезка между приемником и передатчиком в системах радиолокации на просвет / А.Н. Ковалев, Ф.Н. Ковалев // Радиотехнические и телекоммуникационные системы. – 2013. – № 4(12). – С. 30 – 36.
16. Ковалев, А.Н. Точность определения параметров траектории цели в просветной бистатической радиолокационной системе / А.Н. Ковалев, Ф.Н. Ковалев // Вестник Рязанского государственного радиотехнического университета. – 2014. – № 47. – С. 58 – 62.
17. Ковалев, Ф.Н. Определение координат цели методом максимального правдоподобия в просветной многопозиционной радиолокационной системе // Системы управления и информационные технологии. – 2013. – № 2.1 (52) – С. 128 – 132.
18. Ковалев, А.Н. Определение координат движущейся цели в просветной многопозиционной радиолокационной системе / А.Н. Ковалев, Ф.Н. Ковалев // Вестник Рязанского государственного радиотехнического университета. – 2013. – № 4-1 (46). – С. 46 – 49.
19. Ковалев, Ф.Н. Определение координат маневрирующей цели в просветной бистатической радиолокационной системе // Системы управления и информационные технологии. – 2014. – № 1 (55). – С. 27 – 30.
20. Ковалев, Ф.Н. Потенциальная точность определения координат цели при локации “на просвет” с учетом нелинейного характера движения цели, Труды НГТУ. – 2007. – Т. 65, Вып. 14, – С. 75 – 79.
21. Ковалев, Ф.Н. Интегральный доплеровский метод измерения угловых координат объекта в системах радиолокации на просвет // Журнал Радиоэлектроники: электронный журнал. – 2013. – № 12. – URL: http://jre.cplire.ru/jre/dec13/13/text.pdf .
22. Ковалев, Ф.Н. Фазовая пеленгация в системах радиолокации на просвет / Ф.Н. Ковалев, В.В. Кондратьев // Доклады Академии наук. – 2014. – Т. 455, № 4. – С. 401 – 403.