УДК 621.396
К
ВОПРОСУ О ВОЗМОЖНОСТИ ПРИМЕНЕНИИ СВЕРХШИРОКОПОЛОСНЫХ ЗОНДИРУЮЩИХ СИГНАЛОВ В
ГИДРОЛОКАТОРЕ БОКОВОГО ОБЗОРА
А. И. Демидов1,
Н. Н. Залогин2, Р. Ш. Комочков1, С. С. Мосолов1,
А. В. Скнаря2,
С. А. Тощов1, Е. В. Тутынин1
1ОАО «НИИП им. В.В.Тихомирова»
2Институт радиотехники и электроники им. В.А. Котельникова РАН
Получена 8 августа 2012 г.
Аннотация. Рассмотрены некоторые вопросы практического применения сверхширокополосных зондирующих сигналов в отечественной гидролокации на примере работ, совместно проводимых в ИРЭ им. В.А.Котельникова РАН и в ОАО «НИИП им. В.В.Тихомирова».
Ключевые слова: сверхширокополосные зондирующие сигналы, гидролокатор бокового обзора.
Аbstract: Some questions of the practical application of the super wide-band sounding signals in the domestic sonar based on the example of the works, together conducted by Kotel'nikov Institute of Radio-engineering and Electronics of RAS and the Joint Stock Company NIIP are examined.
Key words: super wide-band sounding signals, side-looking sonar.
ВВЕДЕНИЕ
Процесс активного вовлечения водной акватории Земли в экономическую деятельность человечества, наблюдаемый в настоящее время и относящийся в первую очередь к шельфовой зоне морей, богатой природными ресурсами такими как, например, углеводороды, сопровождается увеличением сложности и масштабности решаемых при этом задач, связанных с мониторингом акваторий, поверхности дна, а также его толщи. Это в свою очередь требует улучшения ряда технических характеристик используемых для этого различных типов гидролокаторов, к которым относится и гидролокатор бокового обзора (ГБО). Следует отметить, что на сегодня ГБО является одним из самых распространенных в мире типов гидролокатора, что обусловлено широким спектром и важностью решаемых с их помощью задач, к которым относятся поиск объектов на поверхности дна, проведение экологического мониторинга и т.д.
К важнейшим техническим характеристикам ГБО относятся разрешающая способность и дальность действия. При этом под разрешающей способностью, как правило, понимается разрешение вдоль линии распространения сигнала, которое определяется шириной спектра зондирующего сигнала [1]. Разработчики данного типа гидролокатора до настоящего времени из-за применения в качестве зондирующих сигналов узкополосных сигналов основным способом улучшения разрешения по дальности выбирают повышение рабочей частоты зондирующего сигнала. Однако в этом случае существенно уменьшается дальности действия гидролокатора, и как следствие- увеличение времени обзора заданной площади поверхности дна [2].
Что касается дальности действия ГБО, то применение качестве зондирующих сигналов сложных зондирующих сигналов, таких как, например, сигналы с линейной частотной модуляцией (ЛЧМ), не в полной мере решают эту проблему, хотя и увеличивают дальность действия гидролокатора в 2-3 раза по сравнению с применением в нем в качестве зондирующего сигнала короткой тональной посылки [3].
В этой связи альтернативным решением улучшения указанных выше технических характеристик ГБО может являться использование в них сверхширокополосных зондирующих сигналов (СШПС), работы по использованию которых в гидролокации проводятся в течение последних лет в ИРЭ им. В.А.Котельникова РАН [4]. Отметим, что под термином СШПС здесь понимается сигнал, определение которого дано в работе [5].
ИССЛЕДОВАНИЕ ЭКСПЕРИМЕНТАЛЬНОГО ОБРАЗЦА ГБО В ОТКРЫТОМ ВОДОЕМЕ
В рамках реализации полученных в процессе данных исследований результатов в 2011-2012 годах при непосредственном участии сотрудников ИРЭ им. В.А. Котельникова РАН в ОАО «НИИП им. В.В.Тихомирова» был разработан и создан макет гидролокатора. Зондирующий сигнал в гидролокаторе формируется универсальным цифровым формирователем, что позволяет генерировать в принципе любой сверхширокополосный сигнал. Приемный тракт гидролокатора является широкополосным адаптивным приемным трактом, полоса которого может быть перестроена в процессе работы в широких пределах.
В данном гидролокаторе в качестве приемо-передающей антенны используется антенна со следующими основными параметрами: раскрыв диаграммы направленности в горизонтальной и вертикальной плоскостях составлял, соответственно, 1,5 градуса и 40 градусов, а полоса пропускания по уровню 3 дБ - 78 кГц.
Летом 2012 года на полигоне ОАО «НИИП» на Москве-реке были проведены натурные испытания данного макета гидролокатора
В ходе проведения натурных испытаний для обзора поверхности дна в качестве зондирующего сигнала использовался ЛЧМ сигнал со следующими параметрами:
-нижняя частота -77.5 кГц,
-девиация частоты -78 кГц.
Что касается длительности сигнала, то она, в зависимости от задачи, варьировалась от 7 мс до 100 мс.
В процессе обзора поверхности дна макет гидролокатора был установлен лодке типа «Зодиак», к борту которой с помощью штанг крепилась антенная система гидролокатора. Ниже приводятся некоторые результаты, полученные в ходе данных натурных испытаний.
На рис.1, в качестве примера, показано одно из полученных в ходе проведения испытаний акустическое изображение поверхности дна вблизи берега, при этом лодка с гидролокатором двигалась слева направо, а по оси ординат отложена наклонная дальность в метрах.
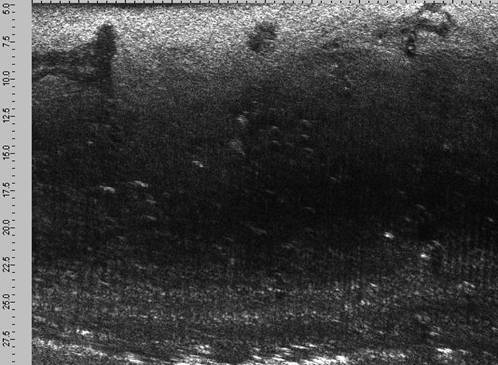
Рис. 1. Акустическое изображение поверхности дна, полученное ГБО с сверхширокополосным ЛЧМ зондирующим сигналом.
На рис.1 показано акустическое изображение поверхности дна при использовании в ГБО сверхширокополосных сигналов. В данном эксперименте длительность ЛЧМ сигнала составляла 7 мс. Как следует из приведенного на рис.1 акустического изображения глубина в подлокаторной точке составляла порядка 5 м.
В рамках данных натурных исследований был проведен эксперимент по оценке дальности действия ГБО со сверхширокополосным ЛЧМ зондирующим сигналом. При этом макет ГБО располагался на пирсе, а приемо-передающая антенна гидролокатора крепилась к металлической штанге длиной 4 м, которая в свою очередь крепилась вертикально к пирсу таким образом, чтобы антенна находилась в толще воды на глубине не менее 1.5 м.
В процессе эксперимента ось диаграммы направленности (ДН) антенны медленно поворачивалась в горизонтальной плоскости в секторе 180 градусов. При этом производилась обработка эхосигнала в реальном времени с выводом результатов обработки на экран монитора в виде акустического изображения и осциллограмм строк зондирования. В процессе сканирования наблюдались отметки от различных целей.
Ниже на рис.2 приведена одна из осциллограмм, показывающих зависимость амплитуды эхосигнала от дальности, полученная в ходе данного исследования, где по оси абсцисс отложена дальность (в метрах), а по оси ординат - амплитуда эхосигнала.
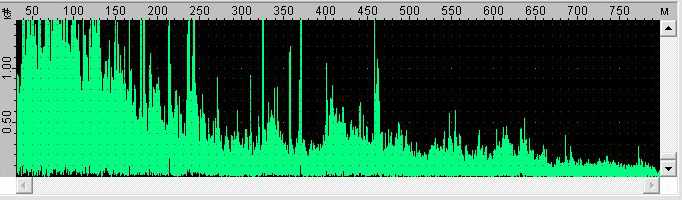
Рис.2. Осциллограмма зависимости амплитуды эхосигнала от дальности в строке зондирования.
Как следует из рис.2, максимальная дальность соответствует дальности порядка 775 метров.
ЗАКЛЮЧЕНИЕ
Результаты проведенных испытаний макета гидролокатора бокового обзора, использующего в качестве зондирующего сигнала сверхширокополосный ЛЧМ сигнал, показывают перспективность применения широкополосных технологий в гидролокации и позволяют говорить о наличии всех компонент, необходимых для разработки различных типов отечественных гидролокаторов со сверхширокополосными зондирующими сигналами.
Работа выполнена при финансовой поддержке Минобрнауки ГК № 07.514.11.4080.
Литература
1. Кук Ч., Бернфельд М. Радиолокационные сигналы. – М.: Советское радио. 1971.
2. А. П. Евтютов и др. Справочник по гидроакустике. - Л.: Судостроение. 1988.
3. А. И. Демидов, Р.Ш. Комочков, С.С. Мосолов, А.В. Скнаря, Е.В.Тутынин Отечественные гидролокаторы со сложными сигналами производства НИИ Приборостроения им. В.В.Тихомирова. – Труды Х Всероссийской конференции «Прикладные технологии гидроакустики и гидрофизики», Санкт-Петербург, 2010 г. С.152-154.
4. Залогин Н.Н., Скнаря А.В. Выбор зондирующего сигнала для гидролокатора». Х111 Международная конференция «Радиолокация, навигация, связь». Воронеж, 2002-2007 г.г., стр.2722-2730.
5. Астанин Л.Ю., Костылев А.А. Сверхширокополосные радиолокационные измерители. Изд. МО СССР, 1983. – с.222.