ОЦЕНКА ПОТЕНЦИАЛЬНЫХ ВОЗМОЖНОСТЕЙ И ПОМЕХОЗАЩИЩЕННОСТИ РАДИОЛОКАЦИОННЫХ СИСТЕМ
В УСЛОВИЯХ РАДИОЭЛЕКТРОННОГО ПРОТИВОДЕЙСТВИЯ
Р. П. Быстров 1, В. А. Вдовин 1, В. Г. Дмитриев 2, В. Л. Меньшиков 3,
В. Н. Пожидаев 1, Ю. М. Перунов 2, В. А. Черепенин 1
1 Институт радиотехники и электроники им. В.А. Котельникова РАН
2 Институт динамики геосфер РАН
3 Министерство обороны РФ
Статья получена 2 августа 2015 г.
Аннотация. Рассматриваются результаты исследований потенциальных возможностей радиолокационных систем в дециметровом, сантиметровом и миллиметровом диапазонах радиоволн. Предложены методики оценки основных параметров радиолокационных систем. Проводится оценка эффективности помехозащищенности радиолокационных систем в условиях радиоэлектронного противодействия. Оцениваются активные и пассивные методы противодействия обнаружению и распознаванию объектов.
Ключевые слова. Радиолокационная система, диапазон радиоволн, помехозащищенность, параметры системы, радиоэлектронное противодействие.
Abstract. In the paper the results of research of potential capabilities of radar systems in the decimeter, centimeter and millimeter wave band are analyzed. A method is proposed for evaluation of basic parameters of radar systems. An assess is made for the effectiveness of radar jamming protection systems under electronic countermeasures. Active and passive methods for counteracting the detection and recognition of objects are evaluated.
Keywords: radar system, range of radio waves, noise immunity, parameters of the system, electronic countermeasures.
Анализ зарубежной и отечественной научно-технической литературы последних лет показывает, что в настоящее время намечается тенденция возрастающего внимания к разработке средств радиоэлектронной борьбы (РЭБ), что вызвано острой необходимостью повышения эффективности функционирования радиоэлектронного оборудования, средств радиолокации и систем обработки и передачи информации в условиях естественных и преднамеренных помех. В финансовых кругах ведущих зарубежных стран практически ежемесячно заключаются контракты на производство систем, приборов, блоков и узлов для системы РЭБ. Так, суммарные расходы в США за последние 20 лет возрастают с 1716,9 млн. дол. в 1980 г. до 3628,2 млн. дол. в 1989 г., а к началу XXI века общий рынок сбыта средств РЭБ увеличился не менее чем на 200 % [1].
Средства РЭБ в зависимости от назначения комплектуются из тех или иных блоков (приемные устройства, передатчики активных помех, антенные устройства и др.) и представляют собой самые разнообразные радиоэлектронные системы (РЭС), которые постоянно совершенствуются.
В ходе ее выполнения наряду с исследованиями в сантиметровом диапазоне волн проведен конкретный анализ и построение моделей для оценки условий функционирования и параметров радиолокационных систем миллиметрового диапазона, а также оценки их эффективности в условиях радиоэлектронного противодействия, что также представляет несомненный интерес.
В данной статье рассматривается ряд интересных и важных вопросов функционирования радиолокационных систем, работающих в широком диапазоне СВЧ радиоволн в условиях помех. Это, прежде всего, выполняется на основе разработанных методик оценка потенциальных возможностей радиолокационных систем в дециметровом, сантиметровом и миллиметровом диапазонах радиоволн и оценка эффективности помехозащищенности радиолокационных систем в условиях радиоэлектронного противодействия.
1. Оценки потенциальных возможностей радиолокационных систем в дециметровом, сантиметровом и миллиметровом диапазонах радиоволн
Рассмотрим параметры РЛС миллиметрового и сантиметрового диапазонов волн, которые часто применяются при обеспечении задач обнаружения и наведения в наземных условиях. Метровые волны находят большое применение для обнаружения объектов в растительности и в основном с воздушных и космических носителей [2-4].
1.1. Дальность действия РЛС в сложных метеоусловиях
В настоящее время накоплены данные о распространении дециметровых, сантиметровых и миллиметровых радиоволн. С помощью этих данных возникает возможность качественной и количественной оценки предельной дальности обнаружения объектов, а также определения деградации РЛС обнаружения объектов в тяжелых метеорологических условиях.
В этом случае необходимо пользоваться известным законом Бугера, согласно которому мощность излучения в поглощающей среде в приближении однократного рассеяния изменяется с расстоянием по экспоненциальному закону. Увеличение числа рассеивателей в среде приводит к возникновению многократного рассеяния, что вызывает нарушение закона Бугера, и ослабление в среде убывает медленнее, чем при однократном рассеянии. Известно, что для определения дальности действия РЛС в тропосфере на дециметровых, сантиметровых и миллиметровых волнах применяются трансцендентные уравнения, решение которых следует искать численными методами или методом подгонки. При этом следует иметь в виду, что результаты вычислений из-за осредненного ослабления в поглощающих средах позволяют приблизиться к реальным оценкам изменения дальности действия РЛС. Однако, более строгий учет неоднородностей ослабления в пространстве и во времени является практически неразрешимой задачей из-за отсутствия текущих мгновенных данных вдоль трассы распространения.
Для решения задачи о влиянии поглощения на дальность действия представим уравнение дальности действия РЛС в однородной среде в несколько иной, чем обычной форме:
где П - потенциал РЛС, равный
отношению мощности, излучаемой в антенну, к чувствительности приемника; d - диаметр апертуры параболоида в м; ![]() -длина волны в мм; R -расстояние в км; σ-эффективная
поверхность рассеяния объекта в кв.м.
-длина волны в мм; R -расстояние в км; σ-эффективная
поверхность рассеяния объекта в кв.м.
Для проведения численных оценок дальности действия РЛС необходимо задаться следующими параметрами РЛС: мощностью передатчика RS, чувствительностью приемника Rпр, длиной волны l, диаметром параболоида d, эффективной поверхностью цели s, подлежащей обнаружению.
Согласно уравнению (1.1) сначала вычисляется предельная дальность действия РЛС при отсутствии ослабления, а затем дальность РЛС из-за воздействия только молекулярного поглощения, после чего находится уменьшение дальности действия при одновременном воздействии молекулярного поглощения и ослабления в дожде или в тумане с малой оптической видимостью. Точное решение трансцендентного уравнения (1.1) может быть найдено методом подгонки, путем определения необходимой дальности для значения α, которое должно быть равно теоретическому значению суммарного молекулярного поглощения или совместному воздействию молекулярного поглощения и ослабления в дожде. Далее влияние молекулярного поглощения и ослабления в гидрометеорах на дальность действия дециметровых, сантиметровых и миллиметровых РЛС могут иллюстрироваться некоторыми типичными примерами в предположении отсутствия неоднородностей среды распространения.
На основании трансцендентного уравнения (1.1) оценим влияние поглощающей среды распространяя на дальность действия дециметровых, сантиметровых и миллиметровых РЛС систем. В целях сравнения различных диапазонов зададим для всех диапазонов одинаковые параметры РЛС. Положим, что потенциал всех РЛС систем П = 3·1015, длительность импульса tи = 2·10-6с., диаметр круглого параболоида 8 м, эффективная поверхность рассеяния цели – 50 м2, длины волн, на которых проведем расчеты по этому уравнению: 100 см; 30см; 10 см; 3 см; 8 мм. Предполагается также, что атмосфера, как среда распространения, является однородной средой вдоль трассы распространения.
Для разных дальностей распространения сигналов на разных длинах волн распределение паров воды, кислорода, тумана, дождей данной интенсивности вдоль трассы предполагается однородным. Предположение об однородности распределения метеоэлементов может иметь место лишь для коротких трасс распространения. Оценки проведены без учета неоднородностей распределения дождей вдоль трассы распространения и неоднородностей ослабления в дождях. Однако, изменчивость интенсивности дождя вдоль трассы оказывает существенное влияние на дальность локации объектов. О степени этого влияния свидетельствуют результаты экспериментов по измерению ослабления в дождях различной протяженности и разной интенсивности на волне 3 см, показанные на рис.1.1.
Видно, что дожди в пространстве неоднородны, при этом ширина полосы дождя данной интенсивности зависит от ее величины. При ливневых дождях полоса, в которой интенсивность дождя имеет постоянное значение, составляют сотни метров и сильно меняется с расстоянием. По трансцендентному уравнению (1.1) было исследовано влияния на дальности действия РЛС полного молекулярного поглощения, тумана, дождевых облаков и дождей с интенсивностью 5 и 100 мм/ч.
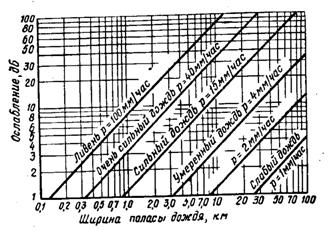
Рис. 1.1. Зависимость ослабления радиоволн от интенсивности и ширины полосы дождя при 16о С
Отдельно рассмотрено влияние молекулярного поглощения и гидрометеорного ослабления в диапазоне миллиметровых волн, где оно проявляется наиболее заметно. При принятых параметрах дециметровых и сантиметровых РЛС предельные дальности действия составили для волн 30, 10 и 3 см соответственно 95, 165, и 302 км. Влияние молекулярного и гидрометеорного ослабления на этих волнах представлено в табл. 1.1, где приведены величины уменьшения дальности действия РЛС из-за поглощения в газах атмосферы и появления туманов и выпадения дождей в % по отношению к дальности действия в 100 км.
Таблица 1.1. Влияние ослабления на дальность действия дециметровых и сантиметровых РЛС
|
Поглощение, ослабление |
Длина волны 30 см |
Длина волны 10см |
Длина волны 3см |
|
Пары воды и кислород |
9,5% |
14,6% |
25,5% |
|
Туман с видимостью 50 м. |
0%
|
0% |
7,3% |
|
Дождь с интенсивностью 5 мм/ч |
0% |
15,2% |
84.8% |
|
Дождь с интенсивностью 100 мм/ч + ослабление в дождевом облаке. |
4,8% |
38% |
95,7% |
На волнах длиннее 1 м данные о распространении отсутствуют по причине крайне малых значений коэффициента ослабления a, которые можно не принимать во внимание.
Из табл. 1.1 следует, что полное молекулярное и в особенности нерезонансное поглощение в кислороде способно уменьшать дальность действия РЛС на расстояниях 100 и более километров.
Однородные по пространству дожди с интенсивностью 5 мм/ч уменьшают дальность действия РЛС в особенности сильно на расстояниях свыше 100 км. Наибольшее изменение дальности действия имеет место при ливневых дождях с интенсивностью 100 мм/ч.
Наиболее сильные туманы с видимостью 50 м. практически не оказывают заметного уменьшения дальности РЛС на дециметровых и сантиметровых волнах.
Однако приведенные данные об уменьшении дальности действия являются завышенными, поскольку расчеты были проведены для случая однородного в пространстве дождя, чего в природе при таких интенсивностях его практически не наблюдается. При больших интенсивностях дождя основная масса выпадающего дождя сосредоточена в ячейке, с диаметром порядка 10-15 км, вследствие чего ослабление радиолокационных сигналов следовало определять по методике Мизма или В.Н. Пожидаева, в работах которых на основе экспериментов произведен приближенный учет пространственной неоднородности дождей высокой интенсивности в Европейской части России [2-4].
На рис. 1.2 показаны некоторые данные о зависимостях интенсивностей дождей от времени их выпадения в течение года в разных районах земного шара.
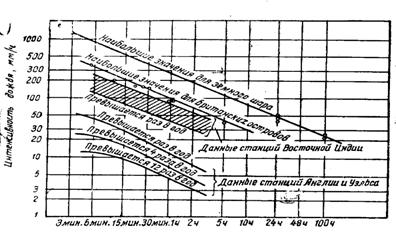
Рис. 1.2. Зависимость интенсивности и продолжительности дождей в различных районах земного шара
1.2. Выбор основных характеристик радиолокационных станций
К числу основных характеристик радиолокационных станций относятся: дальность действия, мощность и длина волны излучения, длительность импульса, чувствительность приемника, диаграмма направленности антенны, разрешение по дальности и угловое разрешение. Характеристики радиолокационных станций тесно связаны с их прямым назначением, а также методом определения координат объектов (импульсный, фазовый и непрерывный методы излучения сигналов).
В общем случае дальность действия РЛС является сложной функцией многих переменных:
R = (R рг , l, D, n, tи ,Pср, А эф.пр, Рпр.мин ,s, ,a, Lт ), ( 1.2)
где Rрг - расстояние до радиогоризонта; Рср - средняя мощность излучения передатчика; l- длина волны; D - коэффициент направленности передающей антенны; n-частота повторения импульсов; tи- длительность импульса; А эф.пр, эффективная поверхность приемной антенны; Р пр.мин.- пороговая чувствительность приемного устройства; s - эффективная поверхность рассеяния цели; a- суммарное ослабление при распространении радиоволн в тропосфере; Lт-потери энергии в трактах.
Необходимо заметить, что выбор параметров РЛС является сложной проблемой, которая может быть решена лишь методом последовательных приближений, поскольку эти параметры зависимы друг от друга, вследствие чего изменение одних значений требует согласованного выбора других.
Зона действия РЛС. Зона действия РЛС над гладкой сферической Землей с учетом искривления траектории луча вследствие регулярной рефракции может быть определена по формуле дальности до радиогоризонта:
Rрг км= 4,1(![]() ( 1.3)
( 1.3)
где Н1 и Н2- высоты приемопередающей антенны РЛС и цели над земной поверхностью в м. После определения типа РЛС и дальности обнаружения объектов в первом приближении, согласованной с (1.3), можно производить выбор других параметров.
Выбор длины волны излучения. Длина волны определяется типом и основными параметрами станции: мощностью излучения, чувствительностью и массогабаритными характеристиками РЛС, размерами антенной системы. Важно отметить, что размеры антенной системы жестко связаны с длинной волны излучения. При этом необходимо отметить, что длина волны выбирается для наземных и самолетных станций различными методами. В последнем случае имеют место существенные ограничения по весам, размерам и аэродинамическим характеристикам.
При определении типа станции наземных РЛС необходимо рассматривать вопрос об их стационарности или подвижности.
Существуют следующие типы радиолокационных станций: РЛС дальнего обнаружения, наземная РЛС обнаружения, самолетная панорамная РЛС, РЛС орудийной наводки, РЛС ближней радиолокации и др.
Известно, что размеры антенны резко возрастают с увеличением длины волны излучения. Антенны для самолетных РЛС имеют жесткие ограничения по типам излучения и размерам. Для наземных РЛС эти ограничения не такие жесткие. Поэтому выбор длины волны производится для каждого типа станции, ее назначения, дальности действия, чувствительности приемного устройства, а также соображениями минимизации массы и габаритов антенны, включая состояние и развитие электронной элементной базы. В частности не последнюю роль играют требования надежности работы системы, а также условия ее работы. Наконец, при выборе длины волны следует принимать во внимание особенности распространения радиоволн в атмосфере, а также влияние молекулярного и гидрометеорного ослаблений на дальность действия РЛС.
Важно отметить, что для систем дальней локации предпочтительнее диапазоны дециметровых волн, на которых метеорологические условия практически не оказывают никакого влияния. На длинных сантиметровых волнах будет иметь место деградация дальности во время выпадения дождей большой интенсивности. На коротких сантиметровых и миллиметровых волнах могут обеспечиваться небольшие дальности действия, высокое угловое разрешение. Однако эффективность действия таких РЛС оказывается высокой на больших дальностях при благоприятных метеорологических условиях и на малых - при неблагоприятных условиях погоды.
Выбор диаграммы направленности антенны. Выбор типа антенны и формы ее диаграммы направленности связан с типом и назначением станции, а также с необходимостью получения высокого разрешения по угловым координатам. Другим соображением при выборе антенной системы является стремление уменьшать помехи приему сигналов путем создания узких пучков излучения.
Кроме того, форма диаграммы направленности должна увязываться со скоростью обзора пространства при заданном времени обзора. Ширина луча должна быть пригодна для надежного сопровождения целей. Ограничения на диаграмму направленности антенны накладываются требованием отсутствия пропуска цели при заданной скорости ее вращения. Поэтому при достаточно узкой диаграмме и высокой скорости вращения возникает возможность пропуска приема отраженного сигнала. В когерентных РЛС уширение диаграммы направленности может уменьшать флуктуации при приеме отраженного сигнала. Поэтому в зависимости от типа станции выбирают величины D и Аэф пр. антенны. Условием, не допускающим пропуск приема сигнала, является соотношение:
![]() ·
·![]() >Dj, (1.4)
>Dj, (1.4)
где Rмакс - максимальная дальность действия РЛС; tоб - время одного оборота антенны; Dj- ширина диаграммы направленности антенны по азимуту.
Частота повторения импульсов. При выборе частоты повторения импульсов следует иметь в виду, что период повторения импульсов РЛС должен быть больше времени распространения сигнала от наиболее удаленной цели. При этом должно выполняться соотношение:
Ти=1,2
![]() ·tи, (1.5)
·tи, (1.5)
где Ти- период повторения импульсов; Rмакс - дальность РЛС.
Увеличение длительности периода повторения импульсов необходимо для надежного приема отраженного сигнала, а также для обеспечения обратного хода луча развертки индикатора кругового обзора. Таким образом, на станции обнаружения объектов с дальностью действия в 200 км минимальный период повторения импульсов может составлять около 2,5 мс, что определяет частоту повторения импульсов порядка n = 1/Т = 400 Гц.
Выбор длительности импульса. При выборе длительности импульса, с одной стороны, следует стремиться к максимизации произведения PStи, определяющего максимальную дальность действия РЛС. С другой стороны, при определении длительности импульса необходимо стремиться к минимизации ее значения по следующим соображениям. Во - первых, малые значения tи обеспечивают минимальную величину мертвой зоны РЛС, определяемую, как:
Rмин = с · tи/2. (1.6)
Значения tи определяют также разрешающую способность по дальности:
DR = с · tи/2. (1.7)
В станциях дальнего обнаружения такая разрешающая способность не реализуется, так как имеет место весьма медленная развертка луча РЛС кругового обзора. В станциях точного измерения координат применяются более короткие импульсы порядка 1 мкс и короче, что приводит к улучшению крутизны фронтов отраженных импульсов и к увеличению разрешающей способности порядка сотен м. Разрешение по угловым координатам составляет по азимуту и углу места порядка нескольких градусов. Однако РЛС орудийной наводки обладают разрешением порядка десятков м. и угловым разрешением в 0,01- 0,03 °.
Точность определения дальности dR зависит от крутизны фронта отраженного импульса:
dR = 150 · (0,1-0,4) tимкс . (1.8)
Наконец, для максимального разрешения двух целей необходимо, чтобы время задержки между двумя целями tз было бы больше половины отраженного импульса:
tз > tи /2. (1.9)
При выборе длительности импульса и ширины полосы частот приемника следует иметь в виду, что длительность импульса не может быть большой, так как при этом теряется выигрыш из-за существующей импульсной эмиссии магнетрона. Экспериментальным путем установлено, что снижение импульсной эмиссии наступает при длительности импульса в 3 - 4 мкс, что уменьшает дальность действия РЛС. Исходя из выше сказанного, длительность импульса tи обычно выбирают в станциях обнаружения порядка 2 мкс.
2. Обоснование параметров РЛС и оценка эффективности помехозащищенности в условиях радиоэлектронного противодействия
Оценка влияния преднамеренных помех в радиолокационном канале при обнаружении (распознавании) радиолокационной системой объектов в процессе распространения электромагнитного сигнала к объекту и обратно, сводится к определению помехозащищенности РЛС во время её функционирования.
Помехозащищенность РЛС в общем случае определяется факторами, основными из которых являются скрытность работы, помехоустойчивость к возможности постановки помех с противоборствующей стороны.
Скрытность функционирования РЛС практически связана с её радиолокационной заметностью и эта позиция уже рассматривалась в предыдущей главе.
Наиболее существенным показателем эффективной работы приемной системы исследуемой РЛС является её помехоустойчивость, как способность системы передачи - приема противостоять вредному действию помех. Такая общая формулировка может быть уточнена применительно к различным условиям функционирования РЛС требованием установки количественной меры помехоустойчивости. При некоторых условиях имеет смысл говорить о помехоустойчивости отдельных звеньев системы, например, о помехоустойчивости кодов, о помехоустойчивости видов модуляции, о помехоустойчивости приемников и т.д. При этом часто достаточно оперировать сравнительной или относительной помехоустойчивостью, что позволяет сравнить между собою различные варианты технических решений.
2.1. Меры помехоустойчивости приемной системы РЛС
Предельно достижимая помехоустойчивость называется, по В. А. Котельникову, потенциальной помехоустойчивостью. Сравнение фактической помехоустойчивости каждого конкретного устройства с его потенциальной помехоустойчивостью дает оценку качества устройства и показывает наличие еще неиспользованных резервов.
Действие помехи проявляется в том, что принятый сигнал (а следовательно, и сообщение) отличается от переданного. Поэтому помехоустойчивость можно характеризовать как степень соответствия принятого сигнала (или сообщения) переданному при заданной помехе.
Таким образом, при сравнении нескольких систем та из них будет более помехоустойчивой, в которой при одинаковой помехе различие между принятым и переданным сигналами (или сообщениями) будет меньше.
Ввести единое количественное определение помехоустойчивости затруднительно, так как и критерий соответствия принятого сигнала переданному и характеристики действующей в системе помехи могут в зависимости от условий передачи существенно различаться.
Вместе с тем оказывается полезным ввести определение для меры соответствия принятого сигнала переданному. С одной стороны, эта мера зависит, очевидно, от помехи, и характеризует, таким образом, помехоустойчивость с необходимой полнотой. С другой стороны, эта мера, взятая не как функция помехи, а как численный показатель системы, работающей в заданных условиях, представляет собой показатель, вполне характеризующий систему с точки зрения потребителя. В самом деле, эта мера характеризует качество системы как совокупности средств для передачи информации. Потребителя интересует лишь получение сообщения, соответствующего переданному, его не интересуют ни условия, в которых работает система, ни меры, принятые для обеспечения гарантированной потребителю степени соответствия.
Количественную меру соответствия приходится выбирать по-разному в зависимости от характера сообщения. Выбор меры зависит от того, передаются ли дискретные символы, или непрерывная функция непрерывного аргумента, которую нужно восстановить при приеме.
В качестве меры помехоустойчивости приемной системы РЛС чаще всего выбирается надежность её функционирования при заданной помехе [5].
Каковы же общие возможности повышения помехоустойчивости? Прежде всего, необходимо отметить, что при данной интенсивности помех вероятность правильного приема тем больше, чем сильнее различаются между собой сигналы, соответствующие различным сообщениям. На языке современной теории различие между сигналами называется расстоянием.
Таким образом, один из путей к повышению помехоустойчивости состоит в выборе системы сигналов, в которой любая пара возможных сигналов как можно далее отстоит друг от друга.
Затем нужно выбрать такой метод приема, который наилучшим образом реализует различие, существующее между сигналами. Приемник, дающий наибольшую возможную при данных условиях вероятность правильного приема, называется идеальным.
Вероятность правильного приема зависит от интенсивности помехи по сравнению с интенсивностью сигнала. Интенсивности сигнала и помехи принято выражать их средними мощностями.
Таким образом, помехоустойчивость характеризуется отношением средней мощности сигнала к средней мощности помехи, для краткости эта величина называется отношением сигнал/помеха.
2.2. Методика и оценка помехоустойчивости РЛС обнаружения наземных объектов
Для оценки помехоустойчивости РЛС обнаружения требуется сравнить уровни помех, которые могут быть созданы на различных участках СВЧ диапазона, при фиксированных внешних условиях и соблюдении необходимых для постановки помех требований. Наибольший уровень прицельных по направлению и частоте помех для РЛС могут создавать станции помех. Конкретных данных о наличии станции помех для РЛС ММ диапазона не имеется. Поэтому оценка помехоустойчивости проводится по аналогии с диапазонами, в которых такие станции существуют.
Мощность помехи Рп на входе приемника РЛС определяется по известной формуле:

где ![]() – мощность передатчика помех;
– мощность передатчика помех; ![]() – коэффициенты усиления антенн станции
помех и РЛС соответственно;
– коэффициенты усиления антенн станции
помех и РЛС соответственно; ![]() – потери в трактах станции
помех и РЛС;
– потери в трактах станции
помех и РЛС; ![]() – множитель потерь на расширение полосы,
необходимой для определения частоты подавляемого сигнала.
– множитель потерь на расширение полосы,
необходимой для определения частоты подавляемого сигнала.
Для оценки принято наиболее вероятное удаление
передатчика помех от РЛС ![]() = 5000 м, подавление осуществляется по боковым лепесткам прицельной по частоте и направлению помехой.
Так как направление на РЛС определяется с ошибкой, то эта ошибка должна
перекрываться ДНА передатчика помех. При достигнутой в настоящее время точности
пеленгования и прицеливания считается, что коэффициент усиления антенны
передатчика помех не должен превышать
= 5000 м, подавление осуществляется по боковым лепесткам прицельной по частоте и направлению помехой.
Так как направление на РЛС определяется с ошибкой, то эта ошибка должна
перекрываться ДНА передатчика помех. При достигнутой в настоящее время точности
пеленгования и прицеливания считается, что коэффициент усиления антенны
передатчика помех не должен превышать ![]() =
2000 [6]. Эта величина принимается одинаковой и постоянной для всех длин волн.
Считается также, что средняя величина коэффициента усиления антенны по боковым
лепесткам составляет 10 дБ по отношению к уровню излучения изотропной антенны.
Примем запас на несовершенство антенны РЛС равным 3 дБ, тогда коэффициент
усиления антенны РЛС в направлении боковых лепестков будет Gбок = 0,2, что соответствует 7 дБ.
=
2000 [6]. Эта величина принимается одинаковой и постоянной для всех длин волн.
Считается также, что средняя величина коэффициента усиления антенны по боковым
лепесткам составляет 10 дБ по отношению к уровню излучения изотропной антенны.
Примем запас на несовершенство антенны РЛС равным 3 дБ, тогда коэффициент
усиления антенны РЛС в направлении боковых лепестков будет Gбок = 0,2, что соответствует 7 дБ.
Необходимая полоса частот прицельной помехи Δƒп должна составлять ± 0,05 % относительно несущей частоты подавляемой РЛС [6]. Полоса частот сигнала РЛС Δƒс определяется длительностью импульса τи по известному соотношению Δƒс = 1/ τи и составляет около 0,02% несущей частоты. Таким образом, потери на расширение необходимой полосы частот передатчика могут быть приняты одинаковыми для всех волн и равными
 (2.2)
(2.2)
Принятые для
расчетов значения мощностей передатчиков помех ![]() ,
коэффициентов ослабления радиоволн в атмосфере γа и
потерь в трактах
,
коэффициентов ослабления радиоволн в атмосфере γа и
потерь в трактах ![]() сведены в табл. 2.1.
сведены в табл. 2.1.
Мощности
передатчиков помех, принятые для расчетов, соответствуют имеющимся в настоящее
время в основных диапазонах. Ожидаемая мощность помехи Рп в зависимости
от длины волны, рассчитанная при перечисленных исходных данных по формуле
(2.1), приведена на графике (см. рис. 2.1), где для сравнения приведены и
уровни шума Рш.пр приемников РЛС. На этом же графике приведены значения
мощностей передатчиков помех ![]() в рассматриваемом
диапазоне волн, принятые для расчета зависимости Рп =
f(λ)
и требуемые мощности передатчиков Ртр, которые необходимы для создания
на входе приемника такого же уровня помехи, как на волне 32 мм.
в рассматриваемом
диапазоне волн, принятые для расчета зависимости Рп =
f(λ)
и требуемые мощности передатчиков Ртр, которые необходимы для создания
на входе приемника такого же уровня помехи, как на волне 32 мм.
Таблица 2.1 Данные для расчетов значения мощностей передатчиков помех
|
Параметры |
Длина волны, мм |
|||||
|
2 |
3 |
4 |
8 |
20 |
30 |
|
|
γа , дБ/км
|
20 1 10 |
40 0,3 9 |
50 0,3 9 |
90 0,06 7 |
200 0,04 5 |
300 0,018 3 |
Из графика видно, что ожидаемые уровни помех на входе приемников РЛС в короткой части ММ диапазона радиоволн существенно ниже мощности собственных шумов приемников.
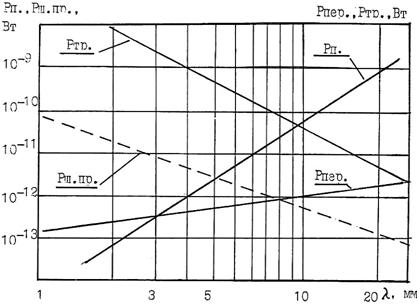
Рис. 2.1. Графики энергетических показателей РЛС
При работе РЛС в режиме секторного поиска коэффициент усиления ее антенны в направлении на передатчик помех будет изменяться в соответствии со структурой ДНА, характеризующейся областями основного и не основного направлений приема.
Область основного направления приема, соответствующая ширине главного лепестка ДНА на уровне 10 дБ, для РЛС составит не более 1–3% ширины сектора сканирования ДНА, что позволяет с погрешностью 3–7% исключить значение составляющей ширины ДНА из величины общего сектора сканирования.
В табл. 2.2 приведены значения мощности
помех на входе приемника, рассчитанные при указанных выше исходных данных и Gпр = ![]() = 0,2. Там же
приведены реальные значения уровня шума Рш.пр приемника РЛС. Из анализа
данных в табл. 2.2 видно, что с ускорением длины волны снижается абсолютное
значение мощности помех в приемнике РЛС.
= 0,2. Там же
приведены реальные значения уровня шума Рш.пр приемника РЛС. Из анализа
данных в табл. 2.2 видно, что с ускорением длины волны снижается абсолютное
значение мощности помех в приемнике РЛС.
При известном законе распределения уровня боковых лепестков можно оценить часть сектора поиска РЛС, подверженную эффективному воздействию помех, в зависимости от дальности обнаружения.
На рис. 2.2 представлены графики зависимости
относительных потерь сектора поиска (здесь: αо –
угол основного сектора поиска; αп – сектор эффективного
воздействия помех) от отношения дальности от объекта к максимальной дальности
действия РЛС, где сплошные линии соответствует станции помех с ![]() = 2000, штриховые Аэф = 0,2 м², а нумерация кривых: 1 – для волны 2 мм; 2 – для длины волны – 3 мм и 3 – для волны 8 мм.
= 2000, штриховые Аэф = 0,2 м², а нумерация кривых: 1 – для волны 2 мм; 2 – для длины волны – 3 мм и 3 – для волны 8 мм.
Из графиков видно, что имеется явное преимущество в помехоустойчивости РЛС коротковолновой части ММ диапазона по сравнению с РЛС, работающими в диапазоне длин волн 8 мм.
Таблица 2.2. Значения мощности помех на входе приемника
|
Характеристики антенны |
Параметры, Вт |
Длина волны, мм |
|||
|
2 |
3 |
4 |
8 |
||
|
|
Рп |
5 10–14 |
7 10–13 |
1,5 10–12 |
4 10–11 |
|
Эффективная поверхность антенны (типа СНАР),
|
Рп Рш.пр |
2,510–11
|
1,1 10–10
|
1,4 10–10 |
8 10–10
|
|
Аэф = 0,2 м² |
- |
3 10–11 |
1,8 10–11 |
1,4 10–10 |
5 10–12 |
Повышение скрытности РЛС достигается такими известными способами, как: снижением спектральной плотности потока мощности зондирующего сигнала, перестройкой частоты передатчика, запрограммированной работой передатчика с определенными паузами («замирания») и др. [7,8]. Последние два способа адекватны для РЛС на любой рабочей волне, поэтому здесь остановимся только на способе снижения спектральной плотности потока мощности.
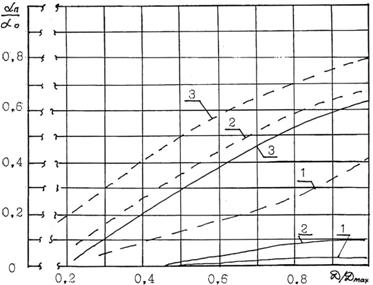
Рис. 2.2. Графики зависимости отдельных потерь сектора поиска от отношения D/Dмах
Снижение спектральной плотности при заданной мощности передающего устройства достигается расширением спектра зондирующего сигнала, что также повышает разрешающую способность РЛС по дальности. За количественную меру скрытности в данном случае, согласно [8], можно взять среднюю радиояркость источника зондирующего сигнала, Вср :
 ,
(2.3)
,
(2.3)
где Рпер.ср. – средняя мощность передающего устройства.
Исходные данные и результаты расчета средней радиояркости по формуле (2.3) приведены в табл. 2.3.
Из приведенных данных следует, что увеличение ширины спектра снижает среднее значение радиояркости зондирующего источника.
В заключении следует отметить, что помехозащищенность РЛС обнаружения наземных объектов в ММ диапазоне (особенно в короткой части), несомненно, лучше по сравнению с РЛС сантиметрового диапазона. Целесообразно привести и другие основные технические способы, позволяющие повысить помехозащищенность РЛС ММ диапазона:
- использование когерентно-импульсного метода радиолокации для обеспечения помехоустойчивости РЛС в условиях воздействия интенсивных помех от подстилающей поверхности;
- использование широкополосных сигналов для снижения радиояркости источника зондирующего сигнала (при одновременном уменьшении мощности передающего устройства до единиц ватт за счет применения методов когерентной обработки принимаемых сигналов скрытность РЛС может быть повышена не менее чем на два порядка);
- использование моноимпульсного метода пеленгации для повышения помехозащищенности пеленгационных каналов РЛС обнаружения.
Таблица 2.3. Исходные данные и результаты расчета среднего значения радиояркости
|
Параметр РЛС |
РЛС с λ = 8 мм |
РЛС с λ = 3 мм |
РЛС «Startle», с λ=3 мм |
|
Рпер.ср., Вт
Аэф , м² Δƒс , МГц |
3
0,126 3 |
8,6
0,28 10 |
0,05 (для τи =100 нс) 0,25 (для τи =500 нс) 0,126 300 |
|
Вср, Вт/м². Гц. стерад
|
8 10–6
|
3 10–6 |
0,67· 10–8 (для τи =500 нс) 0,13· 10–8 (для τи =100 нс) |
3. Анализ работ по современным методам и способам противодействия обнаружению и распознаванию объектов
Возрастание внимания к разработке средств РЭБ в настоящее время вызвано, прежде всего, острой необходимостью повышения эффективности радиоэлектронного оборудования, средств радиолокации, систем обработки и передачи информации. В то же время, система радиоэлектронного противодействия (РЭП) представляет собой комплекс мероприятий и действий по нарушению работы или снижению эффективности применения радиотехнических систем (РТС) [9].
Методы противодействия радиолокационному распознаванию могут быть активные и пассивные.
Активные методы – это методы уменьшения ЭПР объектов. Их можно реализовать формированием СВЧ излучения на борту летательного аппарата (ЛА), амплитуда и фаза которого подстраиваются так, чтобы максимально скомпенсировать отраженный в сторону РЛС сигнал. Они включают: постановку маскирующих шумовых помех, имитацию большой ЭПР малоразмерными целями, имитацию спектральных характеристик реальных целей, имитацию временной структуры радиолокационных портретов реальных целей и комплексную имитацию излучений (ИК, оптического, радиолокационного). Имитация спектральных характеристик реальных целей может включать имитацию различных летательных аппаратов или имитацию гидрометеообразований и турбулентных неоднородностей атмосферы.
Пассивные методы включают: постановку маскирующих помех (дипольные отражатели), уменьшение ЭПР целей и искажение диаграммы обратного вторичного излучения целей. Уменьшение ЭПР целей производится путем выбора соответствующей формы цели, путем применения слабо отражающих композиционных материалов и поглощающих покрытий.
3.1. Активные методы и техника противодействия
А. Имитация большой ЭПР малоразмерными ложными объектами. Необходимо отметить, что при имитации реальных целей радиолокаторами, использующими частоты ниже 1 ГГц, пассивные средства, например уголковые отражатели, должны иметь очень большие размеры, и их использование на малоразмерных ложных объектов (ЛО) невозможно. Поэтому для имитации крупноразмерных объектов в области частот 50–1000 МГц предполагается применение активных средств имитации, т.е. передатчиков ответных помех с сигналами, отраженными от реальных объектов [10-12].
Известны многие и другие конструкции, например, надувные резиновые армированные стеклотканью ЛО в форме головной части баллистической ракеты, на которых для увеличения ЭПР установлены коронообразные отражатели из медной проволоки и др. [12,13].
Б. Имитация спектральных характеристик реальных объектов. В качестве цели, имитирующей большую ЭПР, которая изменяется в полете по закону, близкому к реальному, предлагается использовать специальную ЛО [14]. Для ее запуска применяется дистанционно пилотируемый летательный аппарат-носитель (ДПЛАН) несколько ложных радиолокационных целей. Ложные цели в исходном состоянии на ДРЛАН укрыты съемными радиопоглощающими кожухами, которые удаляются перед пуском. Это исключает их преждевременное обнаружение. На хвосте ЛО устанавливаются направляющие стабилизаторы со скошенными плоскостями, которые обеспечивают ее продольное вращение вокруг оси для изменения ЭПР в полете. Внутри ЛО расположены крестообразные уголковые отражатели из алюминия, которые ограничены в продольном направлении поперечными круглыми дисками. Вращение таких отражателей обеспечивает изменение величины ЭПР во время полета ЛО.
В [15] предложена пассивная ЛО в виде ракеты для имитации бомбардировщика, которая движется со скоростью бомбардировщика. Она имитирует: рысканья, вращения, линейные продольные размеры имитируемого бомбардировщика.
В [16] дано описание ЛО с рулевыми и несущими винтами, буксируемой вертолетом с помощью троса. Цилиндрический корпус обычно выполняется из армированного пенопласта, покрытого стекловолокном. В результате отражения от корпуса очень малы по сравнению с отражениями от винтов.
Применение беспилотных дистанционно-пилотируемых ЛА (ДПЛА) в качестве ЛО, имитирующих средства постановки помех, противорадиолокационные ракеты и другие реальные воздушные цели, позволит, по мнению зарубежных специалистов, противодействовать радиолокационному распознаванию и отвлечь и значительную часть активных средств ПВО для борьбы с ЛО. Это подтвердил опыт войн на Ближнем Востоке, Южной Атлантике и на Балканах [17].
Для имитации таких объектов, как бомбардировщики, могут использоваться специальные беспилотные ЛО дальнего и ближнего радиуса действия. По мнению зарубежных специалистов, требуется 3–5 ЛО – ловушек, имитирующих бомбардировщик. Такое количество ЛО вынуждает рассредоточивать истребители–перехватчики вдоль рубежа перехвата.
Из анализа данных [18,19] следует, что эти ЛО, могут иметь различные модификации и большинство из них являются мало скоростными (примерно скорость вертолета).
Известны устройства, имитирующие сигналы, отраженные от гидрометеообразований и турбулентных неоднородностей атмосферы [20].
Имитация ложных целей естественного происхождения
По мнению иностранных специалистов, спектр сигналов ЛО естественного происхождения [20] (отражения от земли, гидрометеообразований, «ангелов», птиц) находится в диапазоне частот DF=0-500 Гц.
В [21] дана структурная схема генератора радиолокационных целей естественного происхождения (рис. 3.1). Генератор шума – 1, который формирует шум в диапазоне от «нулевой» частоты до нескольких мегагерц.
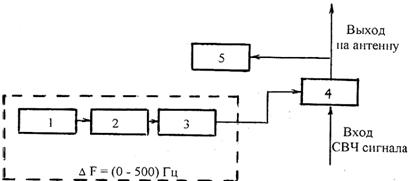
Рис. 3.1. Структурная схема генератора радиолокационных объектов естественного происхождения
С выхода фильтра низких частот – 2 с полосой пропускания DF сигнал поступает на усилитель низкой частоты УНЧ) – 3 с регулируемым коэффициентом усиления. При этом коэффициент усиления УНЧ подбирается в соответствии с результатами визуального контроля спектра шума по анализатору спектра – 5, подключенного с выхода усилителя мощности на ЛБВ - 4. На второй вход ЛБВ поступает СВЧ сигнал, который модулируется по частоте так, чтобы на выходе ЛБВ имитировались сигналы ЛЦ естественного происхождения. Предполагается использовать данное устройство для срыва наведения ракет. Известно аналогичное устройство, отличающееся тем, что через ФНЧ-2 пропускаются только частоты в диапазоне DF= 0–5 кГц, создавая спектр, плотность распределения спектральных составляющих которого изменяется по случайному закону [13].
В [13,22] описаны устройства, имитирующие реальные отражательные сигналы от атмосферных осадков.
Комбинированный ложный объект (оптический и пассивный радиолокационный).
Известны комбинированные ЛО, содержащие, в частности, источник видимого света для противодействия оптическим системам обнаружения и распознавания и металлический светопрозрачный отражатель для радиолокационной имитации объекта – противодействия радиолокационным системам [23]. Радиолокационный отражатель выполнен из проволочной сетки с плотностью восемь ячеек на 2,54 см², т.е. с размерами ячеек d » 0,1 l. Величина ЭПР отражателя
s = 4p (а²)² / 3 l²,
где а – размер ребра тетраэдра радиолокационного отражателя; l.- длина волны РЛС.
Ширина главного лепестка диаграммы обратного вторичного излучения отражателя как в вертикальной, так и в горизонтальной плоскостях составляет ± 20°. Вместо пассивного излучателя в подобном ЛО может использоваться активный переизлучатель в виде ретранслятора на ЛБВ.
При имитации ИК излучения для более достоверной имитации бомбардировщика предлагается использовать сжигание топлива для реактивных двигателей. Пламя может быть и невидимым, так как оно может нагревать поверхность с высокой эмиссионной способностью, например, нержавеющую сталь.
В. Имитация временной структуры радиолокационных портретов реальных объектов. Один из способов имитации временной структуры радиолокационных портретов реальных объектов предлагается в [24]. Он позволяет имитировать дальностные радиолокационные портреты объектов для РЛС с широкополосными сигналами, в которых осуществляется сжатие сигналов по длительности. На рис. 3.2 а показана структурная схема устройства, реализующего этот способ, на рис. 3.2 б вариант размещения нескольких антенн в точках (А, В, С, D, E) для имитации заданного контура объекта (самолета).
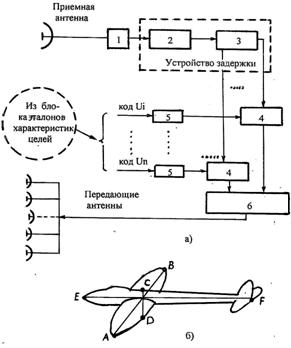
Рис. 3.2. Устройство для имитации радиолокационных портретов реальных объектов (а), контур имитируемого объекта с антеннами А, В, С, Е (б)
Зондирующий импульс от РЛС, для которой создается имитируемый радиолокационный портрет, поступает через приемную антенну, усилитель – 1, устройство грубой задержки – 2 на устройство точной задержки – 3. Устройство грубой задержки обеспечивает задержку по времени t соответствующую расстоянию R до ближайшей блестящей точки имитируемого объекта: t = 2 R / c, где с – скорость распространения электромагнитных волн. Линия задержки с отводами обеспечивает имитацию остальных блестящих точек объекта. Амплитудная и фазовая модуляции обеспечиваются с помощью модулятора – 4, на вторые входы которых через цифроамплитудные преобразователи – 5 поступают соответствующие управляющие напряжения из блока эталонов характеристик объектов – 6. В блоке эталонов записаны коды радиолокационных дальностных портретов имитируемых объектов на всех ракурсах от 0 до 360°. С выхода модуляторов сигналы, имитирующие соответствующие блестящие точки, поступают на сумматор – 6 и затем с помощью передающих антенн излучаются в направлении на РЛС.
Автор [24] считает, что данное устройство позволяет имитировать не только одномерные, но и двумерные, а также трехмерные радиолокационные портреты объектов. Для этого необходимо иметь на платформе несколько разнесенных в пространстве антенн, (например, в точках A,B,C,D,E, рис. 3.2 б).
3.2. Пассивные методы и техника противодействия
Уменьшение величины ЭПР реальных объектов. Этот метод реализуется по программе Stealts двумя способами: выбором формы ЛА, исключающей наличие «блестящих точек», которые образуются стыками, острыми кромками, уголковыми отражателями, большими участками малой кривизны; применением композиционных и поглощающих материалов.
В [25] высказывается предположение, что внутренняя структура корпуса и крыльев ЛА, разрабатываемых по программе Stealts, спроектирована по принципу, аналогичному «безэховым камерам». При этом покрытия элементов крыла и фюзеляжа изготовляются из композиционных материалов.
Для уменьшения ЭПР наземных объектов в широком диапазоне излучения электромагнитных волн в качестве поглощающих покрытий используются специальные маскировочные покрытия, предназначенные для маскировки объектов в диапазоне волн от ультрафиолетовых до СВЧ, включая ИК диапазон. При этом затухание в покрытии достигает до 20 дБ [20,26].
Такие покрытия представляют многослойные структуры с металлизированными поверхностями, причем каждый слой обеспечивает маскировочный эффект для своего диапазона. Уменьшение ИК излучения достигается не только с помощью соответствующих покрытий, но и продуванием горячих газов по специальным каналам, окруженным ламинарными потоками холодного воздуха.
Однако применение таких композиционных материалов, как кевлар, стекловолокно, графито-кевларовое волокно и др. имеет ряд недостатков. В частности, ухудшается экранировка бортового электро- и радиооборудования от внешнего электромагнитного поля и атмосферного электричества, а также электромагнитного импульса, образующегося при ядерных взрывах. Это важно, так как на борту ЛА имеется большое количество устройств цифровой обработки сигналов. К недостаткам композитов также относятся: высокая стоимость изготовления и обработки, недостаточная усталостная прочность, малая термостойкость, в результате чего происходит их выгорание на сверхзвуковых скоростях полета; высокий коэффициент трения и большая удельная масса покрытия. Кроме того, в метровом диапазоне волн, сигналы от планеров самолетов будут иметь большую величину, несмотря на применение композитов [26]. Это обусловлено резонансными явлениями.
Необходимая толщина поглощающих покрытий зависит от несущей частоты РЛС. При уменьшении мощности отраженного сигнала до 1% от падающей мощности толщина d определяется по формуле [26]:
D = 1,15 /b = 0,279 / f e,
где e – диэлектрическая постоянная поглощающей среды; f – несущая частота; b – постоянная затухания.
В области высоких частот при f=94 ГГц для 1%-го отражения мощности требуемая толщина поглощающего покрытия должна быть d = 3 мм; f = 35 ГГц толщина d=1 см. Таким образом, использование поглощающих покрытий в области высоких частот эффективно. Для более низких частот: при f = 10 ГГц d = 3 см, а при f = 1 ГГц d = 30 см, что уже сделать практически нереально.
Из рассмотренного следует, что многочастотные или широкополосные сигналы, наряду с низкочастотными узкополосными, могут быть применены в РЛС для повышения качества обнаружения радиолокационных целей с поглощающими покрытиями.
Искажение диаграммы обратного вторичного излучения реальных объектов. Такой метод противодействия распознаванию может осуществляться с помощью нанесения на ЛА проводящих и поглощающих покрытий, образующих распределенный колебательный контур с управляемыми параметрами [27]. Эти покрытия располагаются так, чтобы параметры полученного колебательного контура не зависели от поляризации зондирующих сигналов РЛС. Подключая дополнительно регулируемые элементы в такой колебательный контур, осуществляют регулировку затухания контура по определенному закону. При этом изменяются величина и закон флуктуаций ЭПР реальной цели, что противодействуют ее распознаванию.
Имеющиеся на борту ЛА устройства также искажают диаграмму обратного вторичного излучения (ДОВИ) по определенному закону. В [28] изложена следующая конструкция. На несущей оси укреплены радиопрозрачные газонаполненные контейнеры с боковыми стенками, образующими уголковые отражатели 1–4 (рис. 3.3).
Число таких контейнеров может быть больше четырех. Эти контейнеры с помощью проводников соединены с выходами соответствующих модуляторов -7, каждый из которых предназначен для модуляции с определенной частотой коэффициента отражения поверхности раздела между уголковыми отражателями и ионизируемым газом. Частоты модуляторов отличаются друг от друга. Информацию, которая определяет закон изменения коэффициентов отражения, снимают с задающих устройств системы управления самолетом – 10 и через мультиплексор – 9 и шифратор – 8 передают на соответствующие модуляторы. Зондирующие колебания, излученные наземной РЛС-5, поступают на один или несколько уголковых отражателей. В результате отражений импульс будет дополнительно промодулирован изменением коэффициента отражения поверхности раздела.
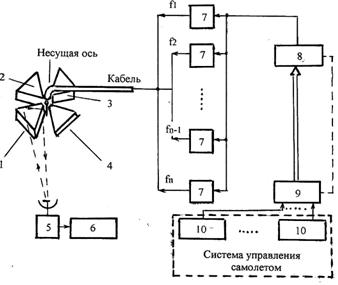
Рис. 3.3. Устройство искажения диаграммы обратного вторичного излучения (ДОВИ) самолета
На рис. 3.3 6- устройство обработки информации. Считается, что можно осуществлять фазовую модуляцию, и тогда ионизированный газ должен находиться в контакте с отражающей поверхностью уголкового отражателя или амплитудную модуляцию, и тогда ионизированный газ должен находиться от отражающей поверхности на расстоянии не более чем на 0,175 l.
В качестве заключения к данному подразделу можно отметить следующее.
Имеющиеся в настоящее время активные (имитация большой ЭПР ложным целям, имитация спектральных характеристик реальных целей, имитация временной структуры радиолокационных портретов целей и др.) и пассивные (уменьшение величины ЭПР целей, искажение диаграммы обратного вторичного излучения целей и др.) методы и техника противодействия радиолокационному распознаванию нашли широкое применение при защите военной техники. Однако, все эти методы и технологии пока являются дорогостоящими и не в полной мере эффективны, поэтому требуют дальнейшего изучения.
Практика применения современных методов и техники противодействия радиолокационному обнаружению воздушных целей показывает, что можно снизить ЭПР таких целей практически на порядок. Так, например, самолеты, не имеющие такой защиты, имеют ЭПР: отечественный самолет Миг-21 – s = 2 м², американский самолет F-16 – s = 2,5 м² и американский самолет “невидимка” F –117 -s = 0,2 м².
Таким образом, приведенные в статье материалы позволяют сделать следующие заключения:
1. В качестве основных характеристик радиолокационных станций относятся: дальность действия, мощность и длина волны излучения, длительность импульса, чувствительность приемника, диаграмма направленности антенны, разрешение по дальности и угловое разрешение. Проведен анализ возможностей радиолокационных станций в зависимости от условий естественных атмосферных помех.
2. Оценка эффективности действия РЛС в условиях организованных активных помех характеризуется интегральным показателем скрытности (дальностью радиотехнической разведки системы РЭП и пассивных помех), требующим снижения снижением импульсной мощности, снижения коэффициента усиления антенны на передачу, снижения уровня боковых лепестков ДНА на передачу и увеличением ширины спектра.
3. Установлено, что пассивные методы, направленные на оптимизацию параметров зондирующего сигнала, реально обеспечивают скрытность работы РЛС только по боковым лепесткам ДНА и могут быть использованы для исключения наведения противорадиолокационных ракет по боковым лепесткам ДНА РЛС. Для обеспечения скрытности работы по главному лепестку ДНА РЛС необходимо использовать активные методы.
4. При обосновании параметров РЛС и оценке эффективности помехозащищенности в условиях радиоэлектронного противодействия необходимо учитывать, что помехоустойчивость РЛС обнаружения наземных объектов в миллиметровом диапазона волн (особенно в короткой части), несомненно, лучше в сравнении с помехоустойчивостью РЛС сантиметрового диапазона.
5. Помехозащищенность РЛС обнаружения наземных объектов в короткой части ММ диапазона радиоволн, несомненно, лучше по сравнению с РЛС более длинноволновых диапазонов.
6. Для обеспечения лучшей помехоустойчивости РЛС в условиях воздействия интенсивных помех от подстилающей поверхности предпочтительнее использование когерентно-импульсного метода радиолокации.
7. Для снижения радиояркости источника зондирующего сигнала необходимо использование широкополосных и сверхширокополосных сигналов. При этом с одновременным уменьшением мощности передающего устройства до единиц ватт - скрытность РЛС за счет применения метода когерентной обработки принимаемых сигналов может быть повышена не менее чем на 2 порядка.
Литература
1. Ин. печать об экон., науч.-техн. и воен. потенциалах гос.- участн. СНГ и техн.средставх его выявления. Сер. «Технические средства разведслужб капиталистических государств», Информационный бюллетень ВИНИТИ, РАН - 2009-2015 г.г.
2. Вопросы перспективной радиолокации. Коллективная монография. /Под ред. А.В. Соколова. – М.: Радиотехника, 2003. – 512 с.
3. Радиоэлектронные системы. Основы построения и теория. Справочник. Изд. 2-е, перераб. и доп./ Под ред. Я.Д. Ширмана. – М.: Радиотехника, 2007. -2007. -512 с.
4. Акиншин Н.С., Быстров Р.П., Румянцев В.Л., Соколов А.В. Миллиметровая радиолокация: методы обнаружения негауссовских сигналов. / Под ред.Р.П. Быстрова. –М.: Радиотехника, 2010. – 528 с.
5. Харкевич А.А. Основы радиотехники. – 3-е изд., стер. – М.: ФИЗМАТЛИТ, 2007. – 512 с.
6. Быстров Р.П., Меркин А.А., Садыков Р.Р., Серебряков О.П. Помехозащищенность радиолокационных систем обнаружения движущихся и неподвижных объектов в миллиметровом диапазоне радиоволн. – Электромагнитные волны и электронные системы, № 3, т.2,1997, с.63-65.
7. Skolnik. Proc. Symph. on Submillimeter wawes, v, March 31 apr. 1,2,1970. NY,pp.9-25.
8. Зубков А.Н. Радиолокационная система обнаружения наземных целей в коротковолновой части ММ диапазона. – Докл. на НТК по миллиметровой технике, Львов, ЛНИРТИ, 1986.
9. Иностранная печать об экономическом, научно-техническом и военном потенциале государств – участников СНГ и технических средствах его выявления. Серю Технические средства разведывательных служб капиталистических государств. –ВИНИТИ, 1998, №№ 9-11.
10. Небабин В.Г., Белоус О.И. Методы и техника противодействия радиолокационному распознаванию. Зарубежная радиоэлектроника, № 2, 1987, с.38- 47.
11. Пат. 3938151 /США/. НКИ 343/18.
12. Пат. 4115775 /США/. НКИ 343/18.
13. Пат. 3852747 /США/. НКИ 343/18.
14. Пат. 3866226 /США/. НКИ 343/18.
15. Пат. 4199166 /США/. НКИ 343/18.
16. Пат. 3010103 /США/. НКИ 343/18.
17. Пат. 4005424 /США/. НКИ 343/18.
18. Wanstal B. – Interavia,1984,v.33,No 7.
19. Grahnam W. – Flight Intern, 1982, v. 122, № 3830.
20. Хайкин С., Кеслер С., Карри С. – ТИИЭР, 1979,т.67, № 2.
21. Пат. 3774208 /США/. НКИ 343/18.
22. Пат. 3832712 /США/. НКИ 343/18.
23. Пат. 4037228 /США/. НКИ 343/18.
24. Пат. 2134740 /Великобритания/. НКИ Н4Д.
25. Brosselin S. – Science & Vie,1985, v.8, № 815.
26. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. – М.: Радио и связь,1985,с.82.