|
|
"ЖУРНАЛ РАДИОЭЛЕКТРОНИКИ" N 12, 2002 |
|
Цифровые системы аттестации аппаратуры обнаружения протяженных объектов (обзорных РЛС)
Сологуб Н.С., Ксендзук А.В.
Национальный аэрокосмический университет им. Н.Е. Жуковского «ХАИ»
Получена 13 декабря 2004 г.
При построении систем обнаружения протяженных объектов (по результатам наблюдения обзорными РЛС) для определения качества функционирования целесообразно использовать цифровые системы аттестации. Принцип действия таких аттестационных систем должен основываться на формировании сигнала, отраженного от подстилающей поверхности и протяженных объектов. При этом необходимо учесть стохастический и нестационарный характер отраженного электромагнитного поля, [1-2].
В качестве уравнения наблюдения примем простейшую аддитивную смесь сигнала, отраженного от поверхности, и естественной помехи. Такие помехи обычно задаются как аддитивный стационарный или нестационарный случайный процесс. Характер распределения естественных помех можно считать гауссовским при выполнения условий центральной предельной теоремы, [3]. Большинство этих помех имеет достаточно широкий спектр по отношению к спектру полезного сигнала и имеет в полосе частот, занятых сигналом, примерно постоянную спектральную интенсивность. Мешающее действие оказывают только те частотные составляющие помехи, которые попадают в полосу частот, занятую сигналом. Поэтому, выбирая математическую модель помехи, предназначенную для анализа процесса приема, не требуется точное воспроизведение этой моделью частотных составляющих, которые не попадают в полосу частот, занятую сигналом.
Модель
поведения удельной эффективной поверхности рассеяния (УЭПР) ![]() , которая используется
здесь для визуальной интерпретации результатов применения различных цифровых
алгоритмов первичной и вторичной обработки, задается в виде пространственной
функции, представленной на рис. 1.
, которая используется
здесь для визуальной интерпретации результатов применения различных цифровых
алгоритмов первичной и вторичной обработки, задается в виде пространственной
функции, представленной на рис. 1.
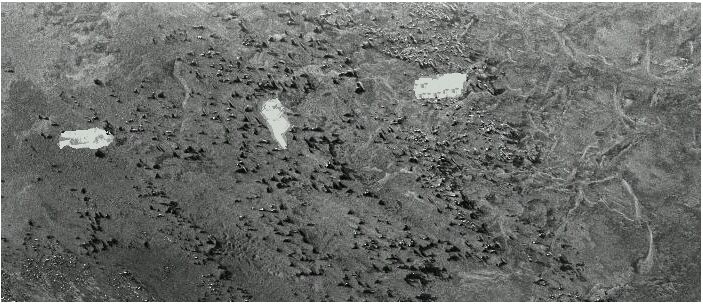
Рис. 1. УЭПР поверхности с протяженными объектами и ее сечение в дальномерной плоскости.
Модель
комплексного коэффициента отражения ![]() в рамках стохастических
моделей поверхности представляет собой пространственный случайный процесс,
изменение второй момента которого определяется изменением УЭПР, [2]:
в рамках стохастических
моделей поверхности представляет собой пространственный случайный процесс,
изменение второй момента которого определяется изменением УЭПР, [2]:
где
 .
.
При
задании ![]() для элементов подстилающей поверхности используется
выражение
для элементов подстилающей поверхности используется
выражение ![]() ,
для модели комплексного коэффициента отражения протяженных объектов -
выражение
,
для модели комплексного коэффициента отражения протяженных объектов -
выражение ![]() , где пространственный размер функции
, где пространственный размер функции ![]() больше элемента разрешения.
Полученное таким образом пространственное распределение реальной части
комплексного коэффициента отражения для модели поведения УЭПР, представленной на
рис. 1, показано на рис. 2.
больше элемента разрешения.
Полученное таким образом пространственное распределение реальной части
комплексного коэффициента отражения для модели поведения УЭПР, представленной на
рис. 1, показано на рис. 2.
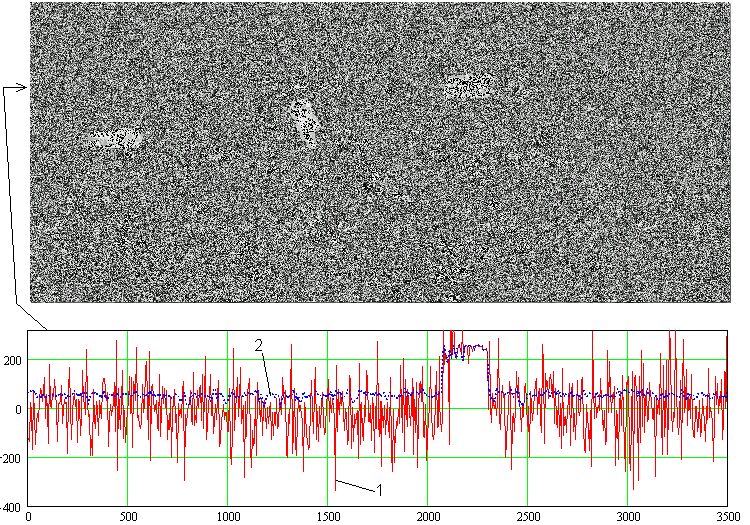
Рис. 2. Распределение реальной части отраженного от поверхности электромагнитного поля:
1- поведение ![]() ; 2 - поведение
; 2 - поведение ![]() .
.
Видно, что отраженное от поверхности электромагнитное поле характеризуется спекл-структурой. Принимаемый антенной сигнал и соответствующее ему изображение зондируемой поверхности можно записать следующим образом:
где
![]() -
принимаемый антенной сигнал в дискретный момент времени
-
принимаемый антенной сигнал в дискретный момент времени ![]() ;
; ![]() - комплексный коэффициент
отражения элемента поверхности;
- комплексный коэффициент
отражения элемента поверхности; ![]() - аддитивный шум;
- аддитивный шум; ![]() - область обзора.;
- область обзора.;
![]() - знак
соответствия (пространственно-временного преобразования);
- знак
соответствия (пространственно-временного преобразования); ![]() - цифровое изображение
зондируемой поверхности, соответствующее принимаемому временному сигналу
- цифровое изображение
зондируемой поверхности, соответствующее принимаемому временному сигналу
![]() ;
; ![]() - сигнальная и
помеховая части РЛИ, соответственно.
- сигнальная и
помеховая части РЛИ, соответственно.
Выражение
(2) задает модель изображения с учетом свертки с пространственным
импульсом и влиянием аддитивного шума, [4]. Результаты цифрового моделирования
![]() (при среднем отношении сигнал/помеха 75 в области обзора)
представлены на рис. 3.
(при среднем отношении сигнал/помеха 75 в области обзора)
представлены на рис. 3.
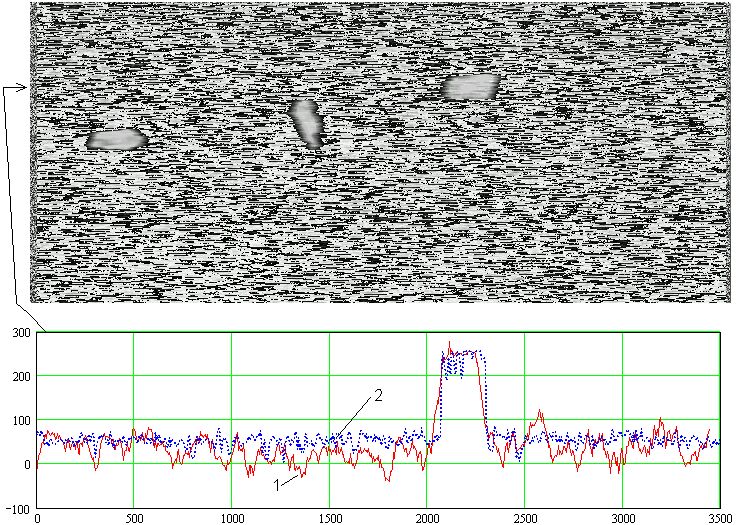
Рис.
3. Пространственная зависимость отсчетов изображения с учетом свертки с
пространственным импульсом и влиянием аддитивного шума: 1- поведение
![]() ; 2 - поведение
удельной эффективной поверхности рассеяния.
; 2 - поведение
удельной эффективной поверхности рассеяния.
В
ряде случаев аттестацию радиолокационных систем и, в частности, систем
обнаружения протяженных объектов целесообразно выполнять с использованием
цифровых имитаторов, генерирующих сигнал, отраженный от поверхности обзора.
Схема такого цифрового имитатора, полученного при учете стохастического
характера поведения отраженного от поверхности электромагнитного поля, приведена
на рис. 4. Он состоит из двух основных блоков - блока формирования сигнала,
отраженного от поверхности, и блока формирования сигнала, отраженного от
протяженных объектов. Соответствующие исходные распределения УЭПР занесены в
ПЗУ1 и ПЗУ2, соответственно. Для учета стохастического характера отраженных
сигналов используются схемы перемножения УЭПР с коррелированными случайными
процессами (соответствующие корреляционные функции определяются значениями
![]() и
и ![]() ). Полученная в
результате суммирования изображений подстилающей поверхности и ПО матрица
отсчетов
). Полученная в
результате суммирования изображений подстилающей поверхности и ПО матрица
отсчетов ![]() хранится в ОЗУ. На соответствующие цепи тестируемого
радиолокатора поступают отсчеты, определяемые состоянием счетчика (характером
пространственно-временного преобразования, осуществляемого радиолокационной
системой).
хранится в ОЗУ. На соответствующие цепи тестируемого
радиолокатора поступают отсчеты, определяемые состоянием счетчика (характером
пространственно-временного преобразования, осуществляемого радиолокационной
системой).
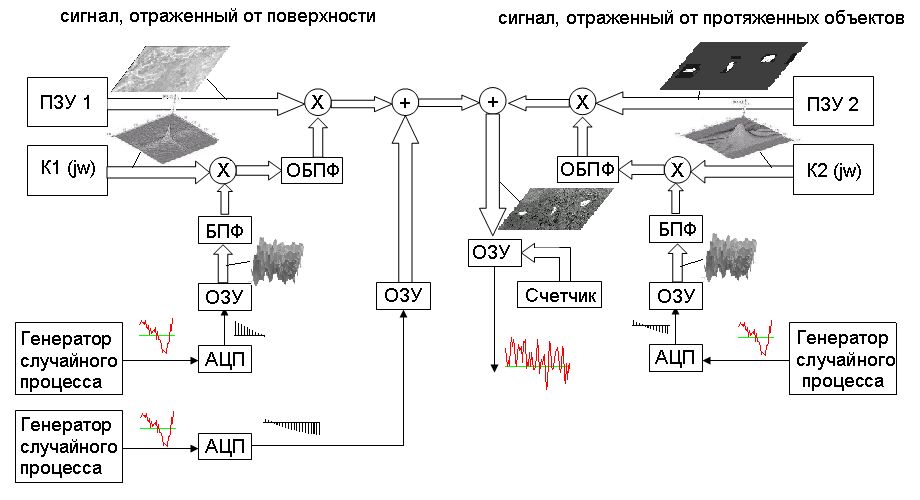
Рис. 4. Цифровой имитатор сигнала, отраженного от поверхности и протяженных объектов.
Принятый процесс поступает на систему обработки, после которой формируется первичное радиолокационное изображение поверхности:
где
![]() - отсчеты
входного процесса,
- отсчеты
входного процесса, ![]() - опорный сигнал для точки пространства
- опорный сигнал для точки пространства ![]() и момента времени
и момента времени ![]() ;
; ![]() - отсчеты изображения (2);
- отсчеты изображения (2);
![]() - отсчеты
пространственной функции неопределенности;
- отсчеты
пространственной функции неопределенности; ![]() - операция свертки;
- операция свертки; ![]() - шум.
- шум.
Результаты моделирования, позволяющие визуально сравнить радиолокационные изображения, полученные при различных алгоритмах первичной обработки для выбранной модели поведения УЭПР (рис. 1), показаны на рис. 5.
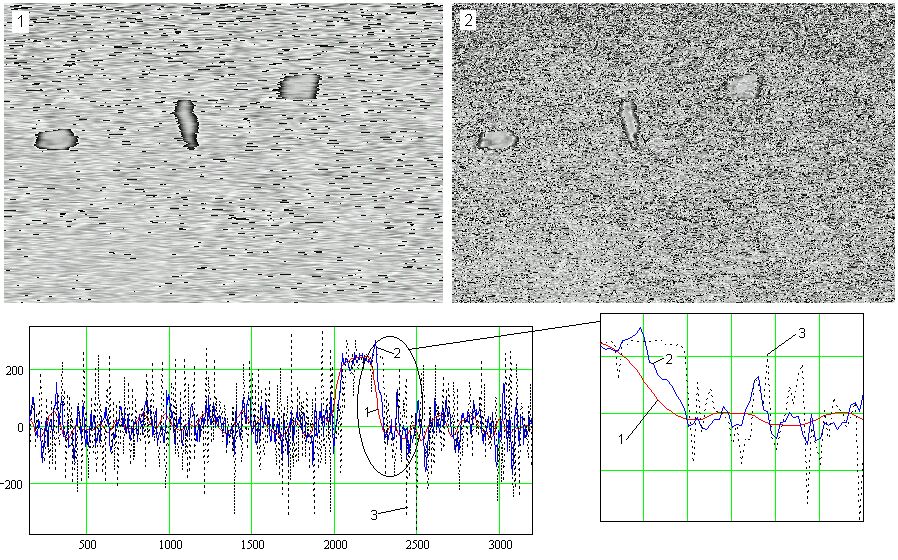
Рис. 5. Изображения после этапа первичной обработки при согласованной фильтрации (1) и декорреляции принимаемого сигнала (2), в сравнении с поведением удельной эффективной поверхности рассеяния (3).
Приведенные выше результаты моделирования визуально должны совпадать с изображениями, полученными на экране обзорного радиолокатора при использовании в качестве генератора сигналов аттестационной системы (рис. 4). Предложенная цифровая схема аттестационной системы (рис. 4) может использоваться и при решении ряда других задач интерпретации изображений (обнаружении точечных объектов, оконтуривании т др.). Более того, предложенная схемная реализация позволяет оценить качество РЛИ при использовании различных алгоритмов первичной и вторичной обработки, [5-6].
Список литературы.
1. А. В. Ксендзук. Статистические характеристики отраженных сигналов для стохастических моделей поверхности и их оценка // Российская академия наук ЖУРНАЛ РАДИОЭЛЕКТРОНИКИ (электронный журнал). - N 7. - июль 2001 г. - http://jre.cplire.ru/jre/jul01/4/text.html.
2. Ксендзук А.В. Использование стохастических моделей поверхности при активном дистанционном зондировании земли // Вестник ХГПУ.-2000.- Вып. 128.- С. 6-12.
3. Фалькович С.Е., Пономарёв В.И., Шкварко Ю.В. оптимальный прием пространственно-временных сигналов в радиоканалах с рассеянием. - М.: Радио и связь, 1989, 295 с.
4. Ksendzuk A.V. Extended quality identifiers for the radar measurements // ICATT 03, 9 -12 sep, 2003.- Sevastopol.- P 757-760.
5. Ксендзук А.В. Волосюк В.К. Применение методов оптимального восстановления статистических характеристик поверхности при картографировании РСА // Картография ХХI века: теория, методы, практика. - Доклады II Всероссийской научной конференции по картографии. – Москва, Россия. - 2001. – C. 306-311.
6. Ксендзук А.В. Качество радиолокационных изображений РСА при использовании алгоритмов декорреляции // Вестник НТУ “ХПИ”.-2001.- №14.- С. 37-42.