УДК 621.396.43
ОБОСНОВАНИЕ ОСНОВНЫХ ХАРАКТЕРИСТИК АНТЕННОЙ СИСТЕМЫ И ПАРАМЕТРОВ УПРАВЛЕНИЯ МОЩНОСТЬЮ ПЕРЕДАТЧИКА РЕТРАНСЛЯТОРА СВЯЗИ НА БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ
М.
Г. Алешин, С. В. Дьяконов, А. Ю. Сивов
Академия Федеральной службы
охраны Российской Федерации, г. Орёл
Получена 28 октября, после доработки – 24 ноября 2011 г.
Аннотация. Рассмотрены условия функционирования ретранслятора связи на беспилотном летательном аппарате. Определены основные требования к управлению характеристикой направленности антенной системы. Описан подход к управлению мощностью передатчика по навигационным показаниям.
Ключевые слова: антенная система, ретранслятор связи, беспилотный летательный аппарат, наземная станция, пространственная нестабильность, навигационные показания, направленность, прогнозирование.
Abstract. The operating conditions of communication retransmitter on the unmanned aerial vehicle are considered. The basic requirements for the directivity pattern control of antenna system are defined. The approach to transmitter power control by navigation indications is described.
Keywords: antenna system, communication retransmitter, unmanned aerial vehicle, ground station, space instability, navigation indications, directivity, forecasting.
Введение
Положительный опыт применения беспилотных летательных
аппаратов (БПЛА) послужил мощным толчком к развитию данной отрасли авиации [1,
2]. Одной
из сфер применения БПЛА является видеонаблюдение, но также известны решения по
установке на БПЛА ретрансляторов связи (РС).
В комплексах связи на БПЛА применяются, в основном, ненаправленные или слабонаправленные антенные системы (АС), обладающие низкой энергетической эффективностью. Зона электромагнитной доступности ненаправленных АС имеет большую площадь, что увеличивает возможность несанкционированного доступа к сигналам радиосистемы, осложняет электромагнитную обстановку, а также снижает помехозащищенность РС [3-5].
Узконаправленные АС, установленные на подвижных платформах, используются для организации канала спутниковой связи в тяжелых БПЛА с большой продолжительностью и дальностью полета, например, американский «MQ-1 Predator» или российский «Дозор-600».
Для построения двухинтервальной (с длиной интервала 20…60 км) дуплексной радиолинии с РС на легком БПЛА (с взлетной массой 50…100 кг и высотой полета 1…4 км) среднего радиуса действия (с дальностью полета 70…150 км) предлагается использовать узконаправленные АС, позволяющие за счет пространственной селекции сигналов повысить энергетическую эффективность и помехозащищенность РС [6, 7].
Применение узконаправленных АС в легких БПЛА осложняется ограниченными возможностями по массогабаритным характеристикам полезной нагрузки, а также нестабильностью пространственного положения вследствие воздействия воздушных потоков. При этом степень влияния нестабильности тем выше, чем уже диаграмма направленности (ДН) АС РС. Складывается противоречие между необходимостью сужения ДН АС с целью повышения энергетической эффективности и помехозащищенности РС и необходимостью ее расширения, с целью обеспечения требуемого качества связи в условиях пространственной нестабильности БПЛА.
Подходы к разрешению противоречия
Сложившееся противоречие может быть разрешено реализацией механизмов управления характеристикой направленности (ХН) узконаправленных АС РС на БПЛА. При этом алгоритмы управления АС должны с заданной точностью поддерживать максимум ХН в направлении на НС при отклонении БПЛА от заданного положения, то есть компенсировать его пространственную нестабильность.
Существует несколько подходов к разрешению противоречия, заключающиеся в применении: а) гиростабилизированных платформ (ГСП); б) сервоприводов наведения АС; в) АС с электрическим сканированием.
Масса и энергопотребление ГСП напрямую зависят от размеров стабилизируемых объектов, поэтому в комплексах на БПЛА последние используются для стабилизации фото‑, тепло‑ и телевизионных камер, имеющих небольшие размеры. Также необходимо отметить, что гироскопические устройства имеют низкую устойчивость к внешним воздействиям, что требует обтекаемой формы стабилизируемого объекта, или его защиты аэродинамическим кожухом.
В [4, 5] предлагается использовать сервоприводы для управления пространственным положением остронаправленной АС в комплексе связи на БПЛА. Для оптимизации процессов вхождения и поддержания связи в состав БПЛА кроме АС и сервопривода должны входить: система автоматического сопровождения по направлению для устойчивого автосопровождения объекта связи в зоне уверенного захвата пеленгационной характеристики и радиоприемное устройство, формирующее сигнал «Связь», свидетельствующий о приеме информации с заданным качеством.
При реализации подходов по управлению АС с использованием ГСП или сервоприводов в РС на БПЛА необходимо установить два комплекта оборудования, что возможно только в тяжелых БПЛА. По мнению авторов, применение в РС на легком БПЛА АС с электрическим сканированием, таких как фазированные антенные решетки (ФАР), является рациональным решением выявленного противоречия.
Постановка задачи
Знание взаимного расположения АС РС и НС является необходимым условием реализации предложенного решения. Определять пространственную ориентацию БПЛА предлагается по сигналам бортовых навигационных комплексов (БНК), интегрирующих показания спутниковой навигационной системы (СНС) ГЛОНАСС и/или GPS инерциальной навигационной системы (ИНС) и позволяющие определять положение с высокой точностью, даже при пропадании сигналов СНС в течение определенного времени.
С целью разработки предлагаемого РС на БПЛА необходимо предъявить требования к основным характеристикам и параметрам управления АС. Для этого разработана методика, включающая в себя: анализ геометрических параметров радиолинии; модель поведения БПЛА и точки прицеливания в результате воздействия воздушных потоков; модель БНК; модель прогнозирования навигационных показаний; расчет основных параметров АС РС [8].
Анализ геометрических параметров радиолинии с РС на БПЛА позволит вычислить углы установки АС и, как следствие, обосновать тип БПЛА по способу создания подъемной силы (самолетного или вертолетного типа). Изучение поведения БПЛА в полете позволит определить требования к сектору сканирования с помощью модели поведения точки прицеливания АС РС.
Так как БНК обновляют навигационные данные с частотой 50 Гц, то на интервале выдачи показаний накапливается ошибка наведения, для минимизации которой предлагается осуществлять краткосрочное прогнозирование пространственного перемещения БПЛА. Оценка ошибки прогнозирования позволит обосновать требование к ширине луча ФАР.
Определение требований к сектору сканирования и ширине луча позволят обосновать геометрическую форму раскрыва ФАР, а также минимальное количество элементов. Кроме того, рассматривается возможность совместного управления ХН узконаправленной АС и мощностью передатчика РС для дополнительного повышения эффективности использования энергетического ресурса БПЛА.
1. Анализ геометрических параметров радиолинии с РС на БПЛА
Радиолиния с РС на БПЛА состоит из двух НС и РС, поднятого на высоту полета БПЛА (рис. 1). Для обоснования требований к антеннам, а также определения основных параметров канала радиосвязи необходимо определить диапазон изменения параметров наведения антенн НС и РС.
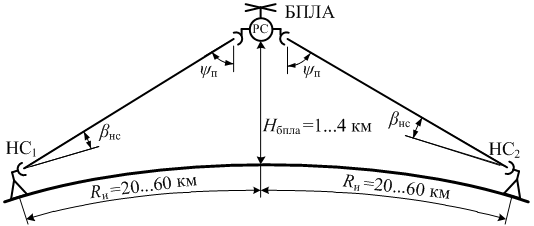
Рис. 1. Геометрическая интерпретация линии с РС на БПЛА.
Выражения, описывающие зависимость
угла подъема АС РС ![]() и угла
места АС НС
и угла
места АС НС ![]() от дальности связи
от дальности связи ![]() и высоты подъема БПЛА
и высоты подъема БПЛА ![]() :
:
 ; (1)
; (1)
 ; (2)
; (2)
где ![]() –
радиус земной сферы.
–
радиус земной сферы.
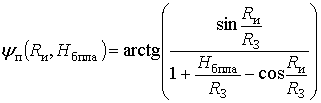
Согласно (1) при указанных на
рис. 1 исходных данных установлено, что ![]() (рис. 2, б),
а значит, требуется практически вертикальная установка АС РС. Учитывая создаваемое
узконаправленной АС аэродинамическое сопротивление, в качестве платформы для РС
целесообразно использовать БПЛА вертолетного типа, способный зависать в одной
точке. В качестве мест размещения узконаправленных АС могут быть выбраны борта
фюзеляжа БПЛА. Применение БПЛА самолетного типа потребует создания аэродинамического
обтекателя, размеры которого должны превышать размеры АС, что потребует
использовать БПЛА больших размеров.
(рис. 2, б),
а значит, требуется практически вертикальная установка АС РС. Учитывая создаваемое
узконаправленной АС аэродинамическое сопротивление, в качестве платформы для РС
целесообразно использовать БПЛА вертолетного типа, способный зависать в одной
точке. В качестве мест размещения узконаправленных АС могут быть выбраны борта
фюзеляжа БПЛА. Применение БПЛА самолетного типа потребует создания аэродинамического
обтекателя, размеры которого должны превышать размеры АС, что потребует
использовать БПЛА больших размеров.
В БПЛА самолетного типа
возможно установка узконаправленных АС под крыльями, но при отклонении луча ФАР
на угол, не превышающий ![]() , длина интервала
должна быть
, длина интервала
должна быть ![]() км (рис. 2, а).
Но на таких дальностях применение узконаправленных АС нецелесообразно.
км (рис. 2, а).
Но на таких дальностях применение узконаправленных АС нецелесообразно.
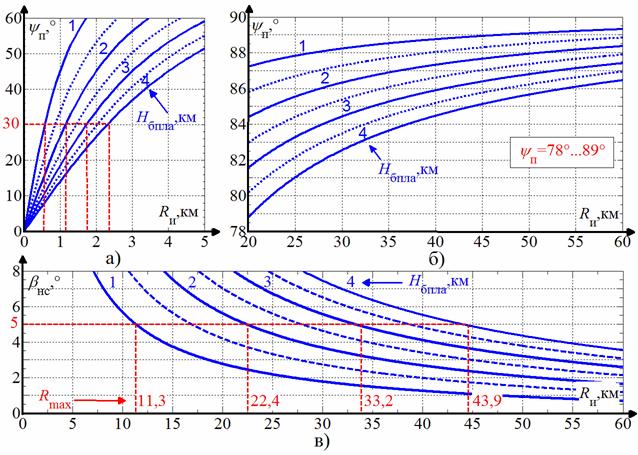
Рис. 2. Зависимости угла подъема антенны РС ![]() (а),
(б) и угла места антенны НС
(а),
(б) и угла места антенны НС ![]() (в) от дальности связи
(в) от дальности связи
![]() и высоты полета БПЛА
и высоты полета БПЛА ![]() .
.
В соответствии с выражением (2)
получены графики изменения угла места АС НС ![]() (рис. 2,
в), анализ которых позволил определить максимальную длину интервала
(рис. 2,
в), анализ которых позволил определить максимальную длину интервала ![]() , при которой
, при которой ![]() .
Полученные результаты позволяют определить границы применения различных моделей
радиоканала.
.
Полученные результаты позволяют определить границы применения различных моделей
радиоканала.
2. Модель поведения БПЛА при воздействии воздушных потоков
В результате исследования динамики полета БПЛА вертолетного типа установлено:
- на режиме висения продольная устойчивость (колебания по тангажу) вертолёта самой распространенной одновинтовой схемы с рулевым винтом в 2 раза выше продольной (колебания по крену) [9];
- движения рыскания (отклонение от заданного курса) могут рассматриваться изолированно [10].
Так как в стационарном полете движения крена и тангажа связаны с боковым и продольным движениями [11], то в общем виде угловое перемещение БПЛА вертолетного типа может быть описано следующими выражениями:
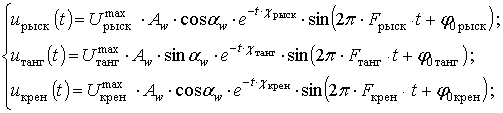 (3)
(3)
где ![]() –
максимальная амплитуда колебаний;
–
максимальная амплитуда колебаний; ![]() – коэффициент силы
воздушного потока;
– коэффициент силы
воздушного потока; ![]() – азимут воздействия воздушного
потока;
– азимут воздействия воздушного
потока; ![]() – частота колебаний;
– частота колебаний; ![]() – начальная фаза колебаний;
– начальная фаза колебаний; ![]() – коэффициент изменения амплитуды
колебаний;
– коэффициент изменения амплитуды
колебаний; ![]() – период уменьшения амплитуды колебаний.
– период уменьшения амплитуды колебаний.
На рис. 3 показано
изменение углов пространственной ориентации БПЛА по тангажу uтанг(t),
крену uкрен(t) и рысканию
uрыск(t) в
результате действия воздушных потоков, пришедших с различных направлений ![]() .
.
На высотах ![]() км не происходит частой смены
направления ветровых потоков, но при этом заранее неизвестно направление
прихода воздушного потока, а также курс БПЛА. С целью анализа перемещения точки
прицеливания АС РС необходимо исследовать реакцию БПЛА в результате воздействия
воздушных потоков, пришедших с различных направлений.
км не происходит частой смены
направления ветровых потоков, но при этом заранее неизвестно направление
прихода воздушного потока, а также курс БПЛА. С целью анализа перемещения точки
прицеливания АС РС необходимо исследовать реакцию БПЛА в результате воздействия
воздушных потоков, пришедших с различных направлений.
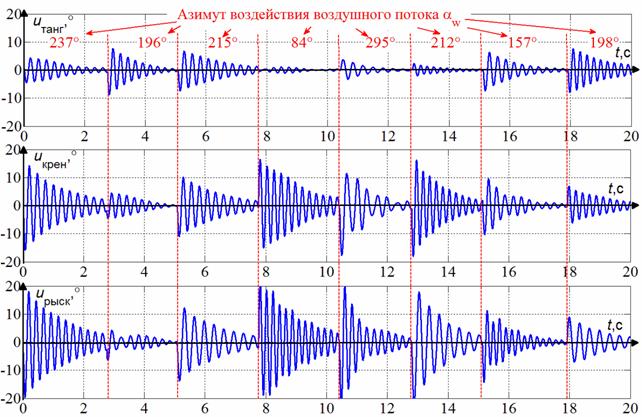
Рис. 3. Колебания БПЛА в результате действия воздушных потоков.
3. Модель поведения точки прицеливания АС РС на БПЛА
Исходя из технических
характеристик БПЛА вертолетного типа, для описания колебаний на режиме висения
были приняты следующие параметры нестабильности: ![]() ,
, ![]() ,
, ![]() ,
, ![]() Гц.
Гц.
В результате преобразований между системами координат Земли, БПЛА и АС определяется перемещение точек прицеливания в системах координат АС.
На рис. 4 показана траектория перемещения точек прицеливания АС РС, установленных по левому (рис. 4, а) и правому (рис. 4, б) борту.
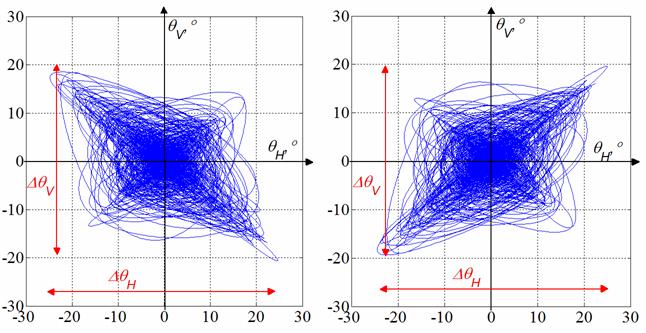
|
а) по левому борту; |
б) по правому борту; |
Рис. 4. Перемещение точки прицеливания в
системе координат АС РС.
Знание диапазона перемещения
точки прицеливания позволяет задать требования к сектору сканирования
АС
РС.
С учетом того, что при изменении ![]() км и
км и ![]() км изменяется
км изменяется ![]() (см. рис. 2 б), в
требованиях к сектору сканирования по вертикали необходимо учесть
(см. рис. 2 б), в
требованиях к сектору сканирования по вертикали необходимо учесть ![]() . Полученный сектор сканирования
. Полученный сектор сканирования ![]() позволяет определить диапазон перемещения
луча узконаправленной АС с управляемой ХН, а при использовании
широконаправленных неуправляемых АС – минимально необходимую ширину ДН. Таким
образом, с учетом запаса сектор сканирования должен составлять
позволяет определить диапазон перемещения
луча узконаправленной АС с управляемой ХН, а при использовании
широконаправленных неуправляемых АС – минимально необходимую ширину ДН. Таким
образом, с учетом запаса сектор сканирования должен составлять ![]() .
.
4. Модель прогнозирования навигационных показаний
В современных БНК интегрированы инерциальная навигационная система и приемник спутниковой навигационной системы ГЛОНАСС и/или GPS, что позволяет определять: линейное и угловое положение БПЛА в пространстве; скорость линейных и угловых перемещений; ускорение линейных перемещений. При управлении ХН АС РС существенное влияние оказывает угловое перемещение. Так как БНК выдают показания дискретно (рис. 5, а), то на интервале выдачи показаний появляется ошибка наведения (рис. 5, б), значение которой тем больше, чем выше нестабильность БПЛА.
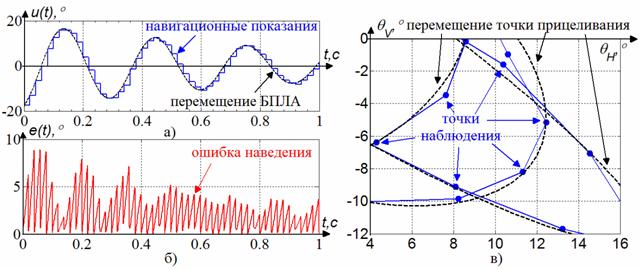
Рис. 5. Влияние дискретности выдачи показаний на ошибку наведения АС РС.
Для поддержания требуемого качества связи при дискретном перемещении луча АС РС (рис. 5, в) необходимо, чтобы луч имел вдвое большую ширину, чем ошибка наведения. Для уменьшения ошибки наведения с целью повышения направленных свойств луча АС РС предлагается управлять движением луча до получения очередных показаний БНК. Реализация предложенного решения требует прогнозирования пространственного перемещения БПЛА по курсу, крену и тангажу.
Прогнозирование пространственного перемещения БПЛА осуществляется в два этапа. На первом этапе осуществляется краткосрочное прогнозирование показаний БНК на один шаг вперед. На втором этапе выполняется расчет траектории изменения параметров пространственного положения.
Исходя из поведения БПЛА на режиме висения, описываемого выражением (3), временной ряд навигационных показаний может быть описан моделью авторегрессии с мультипликативным (экспоненциальным) трендом и мультипликативным сезонным эффектом [12]. Для краткосрочного прогнозирования показаний БНК использован метод экстраполяции регрессионных кривых, для построения которых выбраны интерполяционные полиномы. Возможность БНК выдавать значения скоростей угловых перемещений позволили использовать для прогнозирования интерполяционные полиномы Эрмита 1-й и 3-й степени (H1 и H3) [13]. Получены следующие выражения:
![]() ,
(4)
,
(4)
![]() , (5)
, (5)
где ![]() –
прогнозируемое значение;
–
прогнозируемое значение; ![]() – угловое перемещение;
– угловое перемещение;
![]() – скорость углового перемещения;
– скорость углового перемещения; ![]() – предыдущий, текущий и прогнозируемые
моменты выдачи показаний;
– предыдущий, текущий и прогнозируемые
моменты выдачи показаний; ![]() – период обновления
показаний БНК.
– период обновления
показаний БНК.
В качестве функционала оценки точности
прогнозирования был выбран минимум среднего квадрата ошибки прогнозирования:
ч
 .
(6)
.
(6)
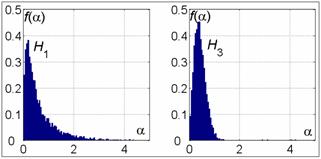
В результате имитационного моделирования в среде MATLAB установлено (рис. 6), что выбор степени полинома зависит от точности БНК. При среднеквадратической ошибке выдачи показаний, сопоставимой с разрешающей способностью БНК (рис. 6, а), максимальной точностью обладают полиномы Эрмита 3-й степени (H3), но при увеличении ошибки до уровня типовых БНК (рис. 6, б) меньшей ошибкой прогнозирования обладают полиномы Эрмита 1‑й степени (H1).
При расчете траекторий изменения параметров пространственного перемещения использован математический аппарат теории интерполяции, в частности, интерполяционные полиномы Ньютона с 1-й по 3-ю степень (N1…N3).
|
а) по крену, тангажу и курсу – 0,05°; |
б) по крену и тангажу – 0,15°; по курсу – 0,40°; |
Рис. 6. Плотность вероятности ошибки прогнозирования АС РС при различной
точности определения положения БПЛА.
Так как максимальный угол ошибки наведения в течение заданного процента времени должен стремиться к минимуму, в качестве оценки точности наведения выбран функционал:
 , (7)
, (7)
где ![]() – ошибка наведения АС;
– ошибка наведения АС; ![]() – угол
между направлением на НС лучом наведения;
– угол
между направлением на НС лучом наведения; ![]() – заданное время (в
процентах).
– заданное время (в
процентах).
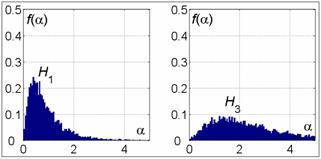
Статистическая обработка результатов имитационного моделирования в среде MATLAB (при точности определения координат: по крену и тангажу – 0,15°; по курсу – 0,40°) позволила получить функции плотности вероятности ошибки наведения АС РС без управления (рис. 7, а) и без прогнозирования (рис. 7, б). Функции плотности вероятности при прогнозировании полиномами Эрмита 1-й и 3-й степени (H1 и H3) и интерполировании полиномами Ньютона с 1-й по 3-ю степень (N1…N3) представлены на рис. 7, в‑з.
На рис. 8 представлены графики функций распределения ошибки наведения для значений F(α)={0,90; 0,95 и 0,99}: без управления (рис. 8, а); без прогнозирования (рис. 8, б); при прогнозировании H1, H3 и интерполировании N1…N3 (рис. 8, в-з).
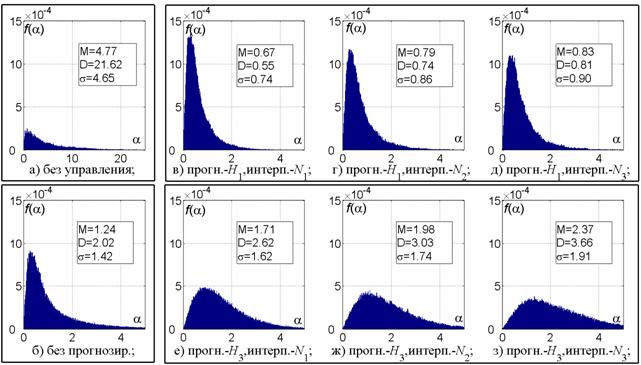
Рис. 7. Плотность вероятности ошибки наведения АС РС.
Рис. 8. Функция распределения ошибки наведения АС РС (фрагменты для определения ошибки при надежности наведения 0,90; 0,95 или 0,99).
С помощью функции распределения ошибки наведения F(α) АС РС определяется максимальная ошибка α при заданной надежности наведения – 0,90; 0,95 или 0,99. Данная ошибка позволяет задать требования к ширине ДН неуправляемой АС РС при заданном качестве связи, а также к ширине луча и сектору сканирования управляемой АС РС.
Установлено, что при ошибке выдачи показаний, соответствующей типовым БНК, прогнозирование полиномами Эрмита 1-й степени и интерполирование полиномами Ньютона 1-й степени позволяют уменьшить требуемую ширину луча примерно в 2 раза, а мощность передатчика в 4 раза. При повышении точности определения БНК пространственного положения по курсу, крену и тангажу до значений 0,05° прогнозирование полиномами Эрмита 3-й степени обладает минимальной ошибкой.
5. Определение основных параметров АС РС
В результате исследования
перемещения точки прицеливания установлено, что сектор сканирования ФАР с
учетом запаса должен составлять ![]() . Также
установлено, при прогнозировании полиномом Эрмита 1-й степени и расчете траектории
полиномом Ньютона 1-й степени ошибка наведения 99% времени не превышает 3°
(рис. 8, в), а значит, ширина луча ФАР должна составлять не менее 6°.
. Также
установлено, при прогнозировании полиномом Эрмита 1-й степени и расчете траектории
полиномом Ньютона 1-й степени ошибка наведения 99% времени не превышает 3°
(рис. 8, в), а значит, ширина луча ФАР должна составлять не менее 6°.
Исходя из размеров фюзеляжа БПЛА вертолетного типа, предполагаемого для применения в качестве платформы для РС (рассматривался БПЛА класса ZALA 421-02) линейные размеры ФАР должны составлять не более 30-40 см. Из характера перемещения точки прицеливания (рис. 4) можно сделать вывод об использовании ФАР с круглым раскрывом.
Полученные выше требования к ширине ДН, сектору сканирования, геометрическим размерам ФАР позволяют определить: количество элементов ФАР, диапазон рабочих частот, поляризационные потери, вызванные колебаниями БПЛА.
Минимально необходимое
количество элементов ФАР с прямоугольным ![]() определяется
из сектора сканирования и ширины ДН в соответствии с выражением [14]:
определяется
из сектора сканирования и ширины ДН в соответствии с выражением [14]:
 , (8)
, (8)
где ![]() -
количество элементов по горизонтали и вертикали;
-
количество элементов по горизонтали и вертикали; ![]() –
сектор сканирования;
–
сектор сканирования; ![]() – ширина луча.
– ширина луча.
Исходя из полученных выше
значений, в состав ФАР с прямоугольным раскрывом должно входить не менее ![]() элементов. При использовании ФАР с
круглым раскрывом требуемое количество элементов приблизительно составит
элементов. При использовании ФАР с
круглым раскрывом требуемое количество элементов приблизительно составит ![]() . Расстояние между элементами ФАР определяется
максимальным отклонением луча [15]. С учетом того, что максимальное отклонение
луча должно составлять
. Расстояние между элементами ФАР определяется
максимальным отклонением луча [15]. С учетом того, что максимальное отклонение
луча должно составлять ![]() , то расстояние между
элементами ФАР не должно превышать 0,67l для
прямоугольной сетки и 0,77l – для
треугольной. Установлено, что при размещении
, то расстояние между
элементами ФАР не должно превышать 0,67l для
прямоугольной сетки и 0,77l – для
треугольной. Установлено, что при размещении ![]() элементов
с шагом 0,5l для
размещения ФАР на БПЛА, в соответствии с приведенными выше ограничениями на
максимальный размер, используемый диапазон частот должен быть не менее
4 ГГц. Применение диапазона частот выше 10 ГГц нецелесообразно, так
как увеличивается затухание сигнала в осадках.
элементов
с шагом 0,5l для
размещения ФАР на БПЛА, в соответствии с приведенными выше ограничениями на
максимальный размер, используемый диапазон частот должен быть не менее
4 ГГц. Применение диапазона частот выше 10 ГГц нецелесообразно, так
как увеличивается затухание сигнала в осадках.
Энергетические потери от нарушения поляризации сигнала обратно пропорциональны квадрату косинуса угла расхождения АС [16]. При размещении АС по бортам потери будут определяться колебаниями БПЛА по тангажу, которые при отклонении на 10° составят 0,13 дБ.
6. Управление мощностью передатчика РС
Для сокращения средней излучаемой мощности и энергии, потребляемой ретранслятором, предлагается адаптивное снижение мощности передатчика.
Наведение узконаправленной ФАР на наземную станцию с учетом прогнозирования положения БПЛА позволяет снизить мощность передатчика до уровня, позволяющего обеспечить требуемое отношение сигнал/шум на входе приёмника наземной станции:
![]() , (9)
, (9)
![]() , (10)
, (10)
где ![]() – мощность сигнала на
входе приёмника наземной станции;
– мощность сигнала на
входе приёмника наземной станции; ![]() – мощность сигнала на
выходе передатчика ретранслятора;
– мощность сигнала на
выходе передатчика ретранслятора; ![]() – коэффициент усиления
антенной системы ретранслятора и наземной станции соответственно;
– коэффициент усиления
антенной системы ретранслятора и наземной станции соответственно; ![]() – ослабление сигнала на интервале
распространения радиоволн;
– ослабление сигнала на интервале
распространения радиоволн; ![]() – требуемое для обеспечения
заданного качества связи отношение сигнал-шум на входе приёмника наземной
станции;
– требуемое для обеспечения
заданного качества связи отношение сигнал-шум на входе приёмника наземной
станции; ![]() – спектральная плотность мощности белого
гауссовского шума.
– спектральная плотность мощности белого
гауссовского шума.
Точность прогнозирования и
дискретный характер переключения лучей, как показано на рис. 9, гарантирует,
что в заданном проценте времени потеря усиления антенны ![]() не
превысит 3 дБ.
не
превысит 3 дБ.
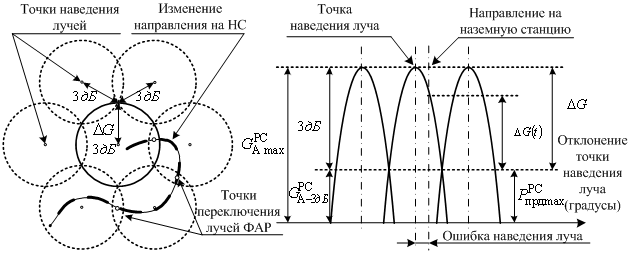
Рис. 9. Переключение лучей АС РС.
Переключение лучей осуществляется при отклонении точки наведения антенной системы от направления на наземную станцию на угол, превышающий половину ширины ДН ФАР.
Требуемая мощность передатчика РС
![]() рассчитывается с учетом ошибки наведения АС
по уровню минус 3 дБ от максимального усиления:
рассчитывается с учетом ошибки наведения АС
по уровню минус 3 дБ от максимального усиления:
![]() . (11)
. (11)
При этом мощность передатчика должна быть в два раза больше, чем при точном наведении антенны.
Дополнительным способом экономии энергии РС является уменьшение мощности передатчика в моменты, когда точка наведения совпадает с максимальным значением усиления антенны:
![]() , (12)
, (12)
![]() , (13)
, (13)
![]() , (14)
, (14)
где ![]() – требуемая мощность
передатчика в текущий момент времени;
– требуемая мощность
передатчика в текущий момент времени; ![]() –
текущее значение дополнительного усиления АС;
–
текущее значение дополнительного усиления АС; ![]() – текущее
значение снижения мощность передатчика.
– текущее
значение снижения мощность передатчика.
Графическая интерпретация
процесса изменения мощности передатчика во временных окнах передачи РС (![]() ) представлена на рис. 10. Использование
дискретных показаний БНК о пространственном положении БПЛА за несколько
временных циклов работы (
) представлена на рис. 10. Использование
дискретных показаний БНК о пространственном положении БПЛА за несколько
временных циклов работы (![]() ) позволяет с допустимой
погрешностью рассчитать непрерывное изменение точки наведения АС. В каждый
момент времени имеется возможность рассчитать угол отклонения точки наведения
луча АС от направления на НС, при этом ХН АС известна. На основании ДН ФАР и
полученного угла прогнозируется дополнительное усиление ФАР на цикл передачи. В
соответствии с прогнозным значением дополнительного усиления осуществляется
изменение мощности передатчика на такте передачи.
) позволяет с допустимой
погрешностью рассчитать непрерывное изменение точки наведения АС. В каждый
момент времени имеется возможность рассчитать угол отклонения точки наведения
луча АС от направления на НС, при этом ХН АС известна. На основании ДН ФАР и
полученного угла прогнозируется дополнительное усиление ФАР на цикл передачи. В
соответствии с прогнозным значением дополнительного усиления осуществляется
изменение мощности передатчика на такте передачи.
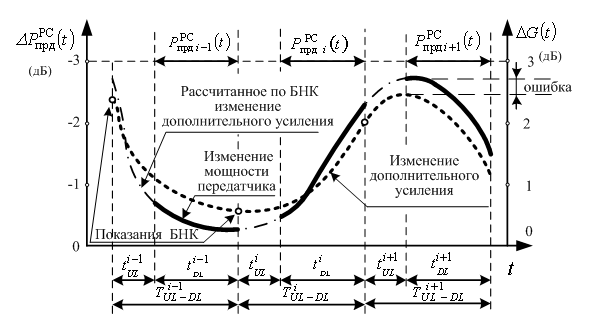
Рис. 10. Изменение мощности передатчика с учетом прогноза дополнительного усиления антенны.
Изменение параметров приводит к
возникновению ошибки прогнозирования. При этом возможно (![]() ), что спрогнозированное сниженной
мощности передатчика окажется больше, чем дополнительное усиление АС.
Требование к
), что спрогнозированное сниженной
мощности передатчика окажется больше, чем дополнительное усиление АС.
Требование к ![]() не будет выполнено, что приведёт к
ухудшению качества связи. С целью избежать критической ошибки прогнозирования,
требуется оценить максимальную разность прогнозного и текущего значения
дополнительного усиления АС и учитывать её при изменении мощности передатчика.
Таким образом, предложенный способ позволит дополнительно уменьшить потребление
энергии и увеличить время работы РС на БПЛА вертолетного типа.
не будет выполнено, что приведёт к
ухудшению качества связи. С целью избежать критической ошибки прогнозирования,
требуется оценить максимальную разность прогнозного и текущего значения
дополнительного усиления АС и учитывать её при изменении мощности передатчика.
Таким образом, предложенный способ позволит дополнительно уменьшить потребление
энергии и увеличить время работы РС на БПЛА вертолетного типа.
Выводы
Обоснована целесообразность применения узконаправленных АС с электрическим сканированием в составе РС на БПЛА вертолетного типа. Предложенное решение отличается от известных тем, что для управления лучом АС используются данные БНК о пространственном положении БПЛА и его перемещении относительно НС. Показано, что ошибка наведения луча накапливается в течение периода обновления показаний БНК, поэтому ширина луча должна иметь удвоенное значение ошибки наведения.
Предлагается управлять перемещением луча на интервале выдачи показаний БНК. С этой целью осуществляется краткосрочное прогнозирование пространственного перемещения БПЛА на основании навигационных показаний с помощью интерполяционных полиномов Эрмита и Ньютона. Результаты анализа влияния точности определения пространственного положения БНК на ошибку прогнозирования позволяют выбрать степень полиномов по критерию минимума среднеквадратической ошибки.
Новизна работы заключается в разработке научно-методического аппарата обоснования основных параметров АС РС с учетом нестабильности пространственного положения БПЛА и возможности ее компенсации в процессе управления ХН за счет прогнозирования параметров наведения луча ФАР в течение периода обновления показаний БНК.
Технический результат по повышению энергетической эффективности РС на БПЛА может быть получен за счет согласованного управления ХН узконаправленной АС и мощностью передатчика РС в зависимости от пространственного положения БПЛА. Адаптивное управление мощностью передатчика РС на основе оценки потери усиления АС из-за неточности ее наведения на НС может обеспечить дополнительный энергетический выигрыш.
Направлением дальнейших исследований является разработка алгоритмов управления движением луча ФАР и мощностью передатчика РС на БПЛА вертолетного типа.
Литература
1. Щербаков В. Беспилотники как средство устрашения. Американцы рассматривают БПЛА в качестве угрозы национальной безопасности. – Материалы сайта «Независимое военное обозрение» (www.nvo.ng.ru), 2009 г.
2. Павлушенко М.И., Евстафьев Г.М., Макаренко И.К. Беспилотные летательные аппараты: история, применение, угроза распространения и перспективы развития – Научные записки ПИР-Центра: Национальная и глобальная безопасность. – Москва, № 2, 2004 г.
3. Попов В., Фетутдинов Д. Тенденции развития систем передачи данных при использовании беспилотных летательных аппаратов // Зарубежное военное обозрение. – № 4, 2006 г., с. 47-51.
4. Сухачев А.Б. Применение остронаправленных антенн в комплексах управления беспилотными летательными аппаратами воздушного базирования // Вопросы оборонной техники. Серия 3. – 2008. вып. 1.
5. Сухачев А. Б. Система управления остронаправленными антеннами в комплексах беспилотных летательных аппаратов// Электросвязь. – 2009. – № 5.
6. Сивов А.Ю., Лазоренко В.С., Алешин М.Г., Дьяконов С.В. Проблемы повышения эффективности функционирования ретранслятора связи на беспилотном летательном аппарате // Научно-технический сборник по материалам Межведомственной конференции на 11-й Международной специализированной выставке «Граница-2009» – М.: ПНИЦ ФСБ России. – 2010., – с. 109-114.
7. Алешин М.Г., Дьяконов С.В., Сивов А.Ю. Повышение энергетической эффективности системы радиосвязи с ретранслятором на беспилотном летательном аппарате // Труды 66-й Научно-технический конференции посвящённой Дню радио - С-Пб.: СПбНТОРЭС. – 2011. – с.174-175.
8. Алешин М.Г., Сивов А.Ю. Обоснование антенной системы ретранслятора связи на беспилотном летательном аппарате // Сборник докладов по результатам Международной научно-технической конференции «Радиотехника, электроника и связь – 2011» – М: «Радиотехника», 2011. – С. 382-391.
9. Bramwell A.R.S., Done G., Balmford D. Bramwell’s helicopter dynamics – 2nd ed. – Oxford: Butterworth-Heinemann, 2001 – 373 p.
10. Джонсон У. Теория вертолета: В 2-х книгах. Пер. с англ. – М.: Мир, 1983 – (Авиационная и ракетно-космическая техника). – 1024 с.
11. Богославский С.В., Дорофеев А.Д. Динамика полета летательных аппаратов: Учебное пособие. – СПб.: СПбГУАП, 2002 – 64 с.: ил.
12. Лукашин Ю.П. Адаптивные методы краткосрочного прогнозирования временных рядов: Учебное пособие – М.: Финансы и статистика, 2003. – 416 с.
13. Половко А.М., Бутусов П.Н. Интерполяция. Методы и компьютерные технологии их реализации – СПб.: БХВ-Петербург, 2004. – 320 с.
14. Вендик О.Г., Парнес М.Д. Антенны с электрическим сканированием (Введение в теорию). – М.: «Советское Радио», 2001. – 252 с.
15. Воскресенский Д.И., Степаненко В.И., Филипов В.С. и др. Устройство СВЧ и антенны. Проектирование фазированных антенных решеток: Учеб. пособие для вузов / Под ред. Д.И. Воскресенского. – 3‑е изд., доп. и перераб. – М.: Радиотехника, 2003. – 632 с.
16. Ерохин Г.А., Чернов О.В., Козырев Н.Д., Кочержевский В.Г. Антенно-фидерные устройства и распространение радиоволн: Учебник для вузов / Под ред. Г.А. Ерохина. – 3-е изд., – М.: Горячая линия – Телеком, 2007. – 491 с.: ил.