УДК 621.396.96, 623.623
БОРТОВАЯ ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РЛС: «ЗОНА ОБЗОРА» ИЛИ «ЗОНА ОБНАРУЖЕНИЯ»?
А. П. Кирсанов 1, Д. Н. Сузанский 2
1 Высшая школа экономики, 2 ОАО «Концерн «ВЕГА»
Получена 20 декабря 2012 г.
Аннотация. Рассматривается зона обнаружения ИД РЛС, размещенной на подвижном носителе. Показываются особенности ее конфигурации. Приведены количественные оценки влияния указанных особенностей на длительность сопровождения воздушных объектов. Показано, что нахождение воздушных объектов в таких зонах позволяет эффективно противодействовать их радиолокационному обнаружению.
Ключевые слова: импульсно-доплеровская РЛС, зона обнаружения, сопровождение воздушных объектов.
Abstract. An area of detection of an impulse Doppler radar based on moving platform is studied. Characteristics of its configuration are shown. Quantitative estimates of influence of the characteristics on duration of tracking of aerial objects. A possibility to effectively resist detection by impulse Doppler radar by staying in such area is demonstrated.
Keywords: impulse Doppler radar, detection area, aerial objects tracking.
В бортовых радиолокационных комплексах самолетов широко применяются импульсно-доплеровские РЛС (ИД РЛС). Указанные РЛС способны с высокой эффективностью обнаруживать низколетящие летательные аппараты на фоне мешающих отражений от подстилающей поверхности [1]. При этом важно отметить, что использование ИД РЛС на подвижном носителе является причиной появления некоторых особенностей в её зоне обзора, а именно появлению зон режекции по радиальным скорости наблюдаемых воздушных объектов (ВО). Размеры и расположение указанных зон зависят от скорости и параметров движения как носителя ИД РЛС, так и воздушных объектов, находящихся в её зоне обзора [2].
При
наблюдении воздушных объектов на фоне подстилающей поверхности в ИД РЛС,
установленных на самолетах, может возникнуть ситуация, когда отраженный сигнал
от ВО попадет в фильтр режекции. В результате этого такой воздушный объект не
обнаруживается, не смотря на то, что он находится в зоне обзора ИД РЛС.
Это происходит из-за того, что радиальная составляющая относительной скорости
такого ВО отличается от радиальной составляющей относительной скорости
подстилающей поверхности не более чем на некоторую величину ![]() , которая определяется режимом работы ИД РЛС.
Указанная зависимость описывается выражением:
, которая определяется режимом работы ИД РЛС.
Указанная зависимость описывается выражением:
где
![]() - радиальная составляющая относительной
скорости ВО,
- радиальная составляющая относительной
скорости ВО, ![]() - радиальная составляющая относительной
скорости подстилающей поверхности.
- радиальная составляющая относительной
скорости подстилающей поверхности.
При
умножении правой и левой частей выражения (1) на ![]() (
(![]() - длина волны), получим условие
«невидимости» воздушного объекта в частотной области. Спектр отражений от
поверхности земли, а также от двух ВО показан на рис.1 [3]. Спектр первого воздушного
объекта попадает в фильтр режекции (для него выполняется условие (1)) и
становится «невидимым» для ИД РЛС.
Спектр второго воздушного объекта, напротив, находится в зоне, свободной от
мешающих отражений от земли, и обнаруживается ИД РЛС.
- длина волны), получим условие
«невидимости» воздушного объекта в частотной области. Спектр отражений от
поверхности земли, а также от двух ВО показан на рис.1 [3]. Спектр первого воздушного
объекта попадает в фильтр режекции (для него выполняется условие (1)) и
становится «невидимым» для ИД РЛС.
Спектр второго воздушного объекта, напротив, находится в зоне, свободной от
мешающих отражений от земли, и обнаруживается ИД РЛС.
Рассмотренная ситуация показывает, что первый воздушный объект обладает очень важным свойством – двигаясь в зоне обзора ИД РЛС он остается для нее «невидимым», другими словами, этот ВО, находясь в зоне обзора, не попадает в зону обнаружения.
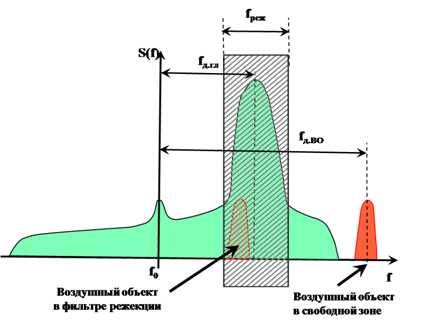
Рис. 1. Спектры отраженных сигналов
Из этого можно сделать два вывода. Первый заключается в том, что для ИД РЛС, установленной на подвижном носителе, зона обнаружения не совпадает с зоной обзора и представляет собой довольно изрезанную область. Причем для каждого наблюдаемого воздушного объекта конфигурация зоны обнаружения своя. Этот факт способствует появлению перерывов в поступлении информации о ВО и сокращению времени их сопровождения.
Второй вывод заключается в том, что для рассматриваемых условий функционирования ИД РЛС, в ее зоне обзора существуют целый класс траекторий полета воздушных объектов, двигаясь по которым, они не обнаруживаются ИД РЛС. Движение по такой траектории представляет собой преднамеренное алгоритмическое воздействии на ИД РЛС со стороны ВО, и это воздействие направлено на противодействие радиолокационному обнаружению.
Для
получения количественных оценок такого воздействия будем использовать две
прямоугольные системы координат: неподвижную Х1ОХ2 и
подвижную Z1OZ2
(см. рис. 2), связанную с носителем ИД РЛС.
Тогда зная, что скорость воздушного объекта ![]() равна
равна ![]() , где
, где ![]() -
относительная скорость воздушного объекта,
-
относительная скорость воздушного объекта, ![]() -
скорость подстилающей поверхности, выражение (1) может быть преобразовано к
следующему виду [3]:
-
скорость подстилающей поверхности, выражение (1) может быть преобразовано к
следующему виду [3]:
где
![]() – вектор, определяющий положение
воздушного объекта в системе координат Z1OZ2,
связанной с ИД РЛС,
– вектор, определяющий положение
воздушного объекта в системе координат Z1OZ2,
связанной с ИД РЛС, ![]() – модуль этого вектора,
– модуль этого вектора, ![]() – скалярное произведение векторов
– скалярное произведение векторов ![]() и
и ![]() .
.
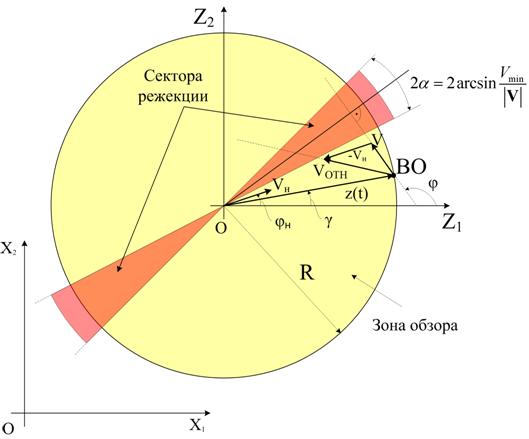
Рис. 2. Расположение секторов режекции
Анализ
(2) показывает, что зона режекции состоит из двух секторов, образованных
пересекающимися прямыми линиями. Точка пересечения указанных линий совпадает с
местоположением носителя ИД РЛС.
Биссектриса указанных секторов перпендикулярна направлению полета. Угловой
размер ![]() каждого сектора равен:
каждого сектора равен:
 . (3)
. (3)
Таким
образом, зная размеры и положение секторов режекции для каждого сопровождаемого
воздушного объекта и при условии, что сектор обзора рассматриваемой ИД РЛС
является кругом радиуса R,
а также принимая, что каждый ВО движется равномерно и прямолинейно, существует
возможность определить значения для времени ![]() влета i‑го
воздушного объекта в сектор режекции и времени
влета i‑го
воздушного объекта в сектор режекции и времени ![]() вылета
из него.
вылета
из него.
Для получения указанных значений рассмотрим единичные векторы, перпендикулярные границам секторов режекции, имеют вид:
 ,
,
 , (4)
, (4)
Используя свойство скалярного произведения векторов, запишем условие пересечения границ сектора режекции:
![]() (5)
(5)
Так как движение воздушного объекта в системе координат Z1OZ2 описывается выражением:
где:
 – вектор, определяющий начальное
положение воздушного объекта (он соответствует положению ВО на границе зоны
обнаружения),
– вектор, определяющий начальное
положение воздушного объекта (он соответствует положению ВО на границе зоны
обнаружения), ![]() – вектор, определяющий
положение воздушного объекта в момент времени t,
– вектор, определяющий
положение воздушного объекта в момент времени t,
![]() – вектор скорости воздушного объекта
относительно скорости носителя РЛС , который определяется как
– вектор скорости воздушного объекта
относительно скорости носителя РЛС , который определяется как ![]() , а в векторном виде
, а в векторном виде
 , (7)
, (7)
то подставляя в (5) уравнение движения (6) и уравнения границ (4) и решая относительно t, находим моменты пересечения границ сектора режекции:
В
этом выражении, если ![]() , то это означает, что вектор
, то это означает, что вектор ![]() скорости ВО параллелен границе зоны и не
пересекает ее.
скорости ВО параллелен границе зоны и не
пересекает ее.
Учитывая
выражения (7) для определения относительной скорости выражения для ![]() и
и ![]() преобразуются
к виду:
преобразуются
к виду:

где
![]() и
и ![]() ‑
компоненты вектора
‑
компоненты вектора ![]() ,
, ![]() ‑
значение скорости ВО,
‑
значение скорости ВО, ![]() ‑ значение скорости
носителя,
‑ значение скорости
носителя, ![]() ‑ угол рыскания ВО, который
отсчитывается от оси ОZ1,
‑ угол рыскания ВО, который
отсчитывается от оси ОZ1,
![]() ‑ угол определяет направление
движения носителя,
‑ угол определяет направление
движения носителя, ![]() ‑ угловой размер сектора
режекции для ВО.
‑ угловой размер сектора
режекции для ВО.
Полученные
выражения позволяют найти моменты времени входа ![]() в
сектор режекции и выхода
в
сектор режекции и выхода ![]() из него относительно
момента
из него относительно
момента ![]() появления ВО на границе зоны обзора ИД РЛС.
Для оценки времени, в течении которого сопровождаемый воздушный объект будет “невидимым”
(находится вне зоны обнаружения, находясь в зоне обзора), необходимо вычислить разность
времен
появления ВО на границе зоны обзора ИД РЛС.
Для оценки времени, в течении которого сопровождаемый воздушный объект будет “невидимым”
(находится вне зоны обнаружения, находясь в зоне обзора), необходимо вычислить разность
времен ![]() и
и ![]() . Важно
отметить, что если либо
. Важно
отметить, что если либо ![]() либо
либо ![]() (либо оба вместе) являются
отрицательными, то это означает, что пересечение сектора режекции произошло в
«прошлом», т.е. до момента влета ВО в зону обзора.
(либо оба вместе) являются
отрицательными, то это означает, что пересечение сектора режекции произошло в
«прошлом», т.е. до момента влета ВО в зону обзора.
Для того, чтобы определить на сколько сокращается длительность сопровождения ВО из-за появления сектора режекции, необходимо также знать время момента выхода из зоны обнаружения.
Для этого на основании выражения (6) и предположения, что зона обнаружения РЛС считается кругом радиуса R, имеем, что длина вектора |z(t)| равна радиусу этой зоны :
![]()
Выполнив умножение и решив полученное уравнение относительно t имеем:
 (9)
(9)
Так как в начальный момент времени t = 0 воздушный объект находится на границе зоны обнаружения, т.е. z(0) = z0 = R , и движется внутрь ее, то выражение (9) принимает более простой вид:
 (10)
(10)
Или,
если выразить ![]() через параметры движения ВО и
носителя РЛС и учитывая, что |z(t)|=R,
получаем зависимость времени выхода из зоны обнаружения от углов φ
и β, определяющих движение
ВО и точку его входа в зону обнаружения РЛС (рис.1)
через параметры движения ВО и
носителя РЛС и учитывая, что |z(t)|=R,
получаем зависимость времени выхода из зоны обнаружения от углов φ
и β, определяющих движение
ВО и точку его входа в зону обнаружения РЛС (рис.1)
 (11)
(11)
Для исследования влияния рассматриваемого сектора на сопровождение воздушных объектов было проведено статистическое моделирование. При моделировании полагалось, что скорость V воздушного объекта постоянна, точки влета ВО в зону обнаружения считались равномерно распределенными на верхней полуокружности радиуса R (радиус зоны обзора РЛС) и центром в месте расположения РЛС. Направление движения φ (угол рыскания воздушного объекта) полагался равномерно распределенной случайной величиной на интервале [0,2π]. При моделировании рассматривалась траектория движения воздушного объекта, приведенная на рис. 3.
При
такой траектории воздушный объект сначала обнаруживается и сопровождается,
затем через некоторое время входит в область режекции (в момент времени ![]() ), а затем выходит из зоны режекции (в
момент времени
), а затем выходит из зоны режекции (в
момент времени ![]() ). Кроме этого принималось
допущение о том, что воздушный объект внутри области режекции не производит
никаких маневров, т.е. движется равномерно и прямолинейно.
). Кроме этого принималось
допущение о том, что воздушный объект внутри области режекции не производит
никаких маневров, т.е. движется равномерно и прямолинейно.
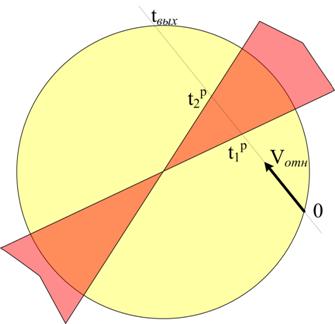
Рис. 3. Вариант траектории
Методика
моделирования заключалась в том, что для каждой случайной реализации траектории
движения ВО (угол φ
и точка входа в зону) с использованием (8) определялись моменты ![]() и
и ![]() пересечения
границ сектора режекции, а также с использованием (11) – момент
пересечения
границ сектора режекции, а также с использованием (11) – момент ![]() выхода ВО из зоны обзора. По вычисленным
значениям
выхода ВО из зоны обзора. По вычисленным
значениям ![]() ,
, ![]() и
и ![]() принималось решение о соответствии
полученной реализации траектории, траектории, изображенной на рис. 3. По
результатам многократного (50000 реализаций) выполнения данной процедуры
подсчитывалась частота появления рассматриваемого варианта траектории.
принималось решение о соответствии
полученной реализации траектории, траектории, изображенной на рис. 3. По
результатам многократного (50000 реализаций) выполнения данной процедуры
подсчитывалась частота появления рассматриваемого варианта траектории.
Зависимость
частоты (вероятности) появления рассматриваемой траектории от отношения ![]() скорости носителя к скорости полета ВО
представлены на рисунке 4.
скорости носителя к скорости полета ВО
представлены на рисунке 4.
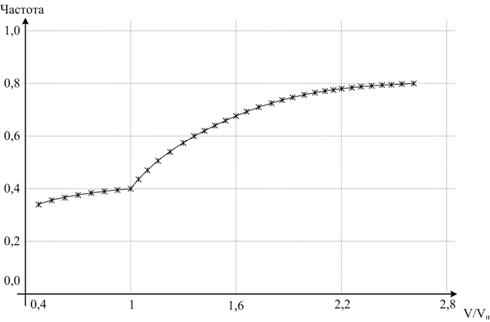
Рис. 4. Частота появления рассматриваемой траектории
Характер
графика показывает, что при  он имеет особенность
(излом), что связано с качественным изменением множества возможных направлений
вектора относительной скорости воздушного объекта. Так если при соотношении
он имеет особенность
(излом), что связано с качественным изменением множества возможных направлений
вектора относительной скорости воздушного объекта. Так если при соотношении  вероятность рассматриваемого класса
траекторий практически не изменялась и составляла 0,35...0,4, то при
возрастании соотношения
вероятность рассматриваемого класса
траекторий практически не изменялась и составляла 0,35...0,4, то при
возрастании соотношения  вероятность появления
таких траекторий резко увеличивается до 0.8 при соотношении скоростей
вероятность появления
таких траекторий резко увеличивается до 0.8 при соотношении скоростей  .
.
Приведенная
формула (2) позволяет также вычислить вероятность нахождения воздушного объекта
в секторе режекции в зависимости от отношения ![]() .
Согласно рисунку 1 положение ВО относительно носителя ИД РЛС определяется двумя
углами:
.
Согласно рисунку 1 положение ВО относительно носителя ИД РЛС определяется двумя
углами: ![]() и
и ![]() ,
которые могут принимать значения из интервала [0, 2π].
Таким образом, пара координат
,
которые могут принимать значения из интервала [0, 2π].
Таким образом, пара координат ![]() определяет, находится
ВО в секторе режекции или нет.
определяет, находится
ВО в секторе режекции или нет.
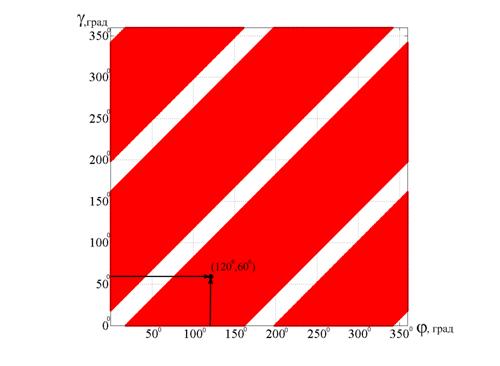
На
рисунке 5а) показано множество точек ![]() , которое соответствует
нахождению воздушного объекта в секторе режекции для отношении
, которое соответствует
нахождению воздушного объекта в секторе режекции для отношении  (красное поле). Горизонтальная ось
соответствует возможным значениям угла
(красное поле). Горизонтальная ось
соответствует возможным значениям угла ![]() ,
вертикальная - возможным значениям угла
,
вертикальная - возможным значениям угла ![]() . Так
например, если положение наблюдаемого ВО соответствует координатам
. Так
например, если положение наблюдаемого ВО соответствует координатам ![]() и
и ![]() , то
это означает, что воздушные объект находится в секторе режекции и является
невидимым для РЛС.
, то
это означает, что воздушные объект находится в секторе режекции и является
невидимым для РЛС.
Изменение
размеров указанного множества в зависимости от отношения ![]() показано на рисунке 5б). Красное поле
соответствует отношению , желтое поле –
отношению
показано на рисунке 5б). Красное поле
соответствует отношению , желтое поле –
отношению  .
.
а)
области невидимости при отношении
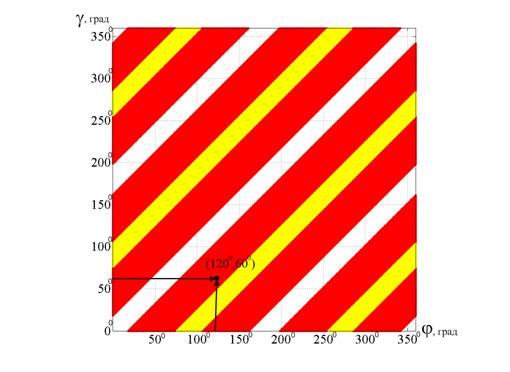
б)
области невидимости (желтый цвет) при отношении
Рис. 5. Области невидимости ИД РЛС
Как
видно из рисунка, при увеличении отношения ![]() размерность
рассматриваемого множества уменьшается, т.е. уменьшается их площадь. Так для
нашего примера (положение ВО соответствует координатам
размерность
рассматриваемого множества уменьшается, т.е. уменьшается их площадь. Так для
нашего примера (положение ВО соответствует координатам ![]() и
и
![]() ) видно, что при отношении скоростей воздушный объект уже не находится в
секторе режекции, т.е. от является видимым для бортовой ИД РЛС. Важно отметить,
что если указанное отношение
) видно, что при отношении скоростей воздушный объект уже не находится в
секторе режекции, т.е. от является видимым для бортовой ИД РЛС. Важно отметить,
что если указанное отношение  , то воздушный объект
находится в зоне режекции для любых значений углов
, то воздушный объект
находится в зоне режекции для любых значений углов ![]() и
и ![]() (см. формулу (2)).
(см. формулу (2)).
Далее,
используя представленные на рисунке 5а) и 5б) области, имеется возможность оценить
вероятность нахождения воздушного объекта в секторе режекции в зависимости от
отношения ![]() . Для этого воспользуемся определением
статистической вероятности [4] и будем определять нашу вероятность как
отношение площади фигуры, соответствующей нахождению ВО в секторе режекции, к
площади прямоугольника, вершины которого находятся в точках (0, 0), (0, 2π),
(2π, 2π)
и (2π, 0). Для
нахождения указанных площадей в работе был использован методом Монте-Карло.
. Для этого воспользуемся определением
статистической вероятности [4] и будем определять нашу вероятность как
отношение площади фигуры, соответствующей нахождению ВО в секторе режекции, к
площади прямоугольника, вершины которого находятся в точках (0, 0), (0, 2π),
(2π, 2π)
и (2π, 0). Для
нахождения указанных площадей в работе был использован методом Монте-Карло.
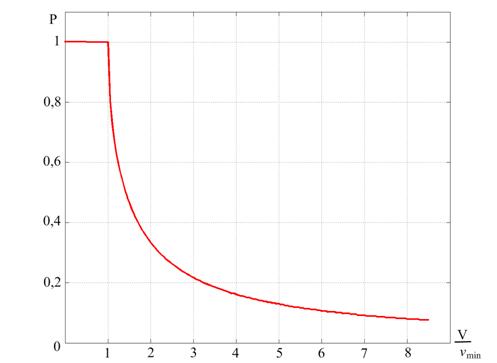
Рис. 6 Вероятность нахождения ВО в секторе режекции
Зависимость
вероятности нахождения воздушного объекта в секторе режекции в зависимости от
отношения ![]() представлена на рисунке 6. При
отношении
представлена на рисунке 6. При
отношении  указанная вероятность равна 1, а при
указанная вероятность равна 1, а при  вероятность стремиться к нулю. Так
например, если для наблюдаемого ВО отношение
вероятность стремиться к нулю. Так
например, если для наблюдаемого ВО отношение  , то
вероятность нахождения его в секторе режекции равна 0,63. Важно отметить, что
найденную вероятность можно использовать как меру, которая показывает, на
сколько процентов зона обнаружения меньше зоны обзора бортовой ИД РЛС для
заданного отношения
, то
вероятность нахождения его в секторе режекции равна 0,63. Важно отметить, что
найденную вероятность можно использовать как меру, которая показывает, на
сколько процентов зона обнаружения меньше зоны обзора бортовой ИД РЛС для
заданного отношения ![]() .
.
Таким образом, результаты моделирования показывают, что в зонах обзора современных бортовых ИД РЛС существуют прямолинейные траектории движения воздушных объектов, перемещаясь по которым такие воздушные объекты могут оставаться «невидимыми». Причиной этому являются сектора режекции, обусловленные наличием в составе оборудования рассматриваемых бортовых РЛС одноименного фильтра. Такие сектора существенно изменяют конфигурацию зоны обнаружения ИД РЛС, установленной на подвижном носителе. Следствием этого является то, что зона обнаружения у таких РЛС не совпадает с зоной обзора. При этом различие таких зон может достигать от 100% до 8%. Этот факт позволяет воздушным объектам оставаться «невидимыми», находясь в зоне обзора ИД РЛС, и тем самым оказывать существенное противодействие их радиолокационному обнаружению.
1. Авиация ПВО России и научно-технический прогресс: Боевые комплексы и системы вчера, сегодня, завтра. / Под ред. Е.А. Федосова. — М.: Дрофа, 2001.
2. Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Состояние и тенденции развития. — М.: Радиотехника, 2008.
3. Авиационные радиолокационные комплексы и системы. / Под ред. П.И. Дудника. — М.: ВВИА им. проф. Н.Е. Жуковского, 2006.
4. Феллер В. Введение в теорию вероятностей и ее приложения. — М.,: Мир, 1984.