УДК 621.37.037,621.375.026
ПРОБЛЕМЫ РАЗРАБОТКИ ПРИЕМНОГО УСТРОЙСТВА РСА ДЛЯ БПЛА. ПРОЕКТИРОВАНИЕ И ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
В. К. Цветков, К. С. Лялин
Национальный
исследовательский университет «МИЭТ»
Статья
получена 16 декабря 2013 г.
Аннотация. Целью работы является приемное устройство радиолокатора с синтезированной апертурой с высокой разрешающей способностью. В ходе исследования устанавливается возможность создания такого устройства для РСА БПЛА. Выявляются проблемы, возникающие на этапах разработки и отладки устройства, проводится поиск решений. Проведен обзор существующих устройств, их характеристик. Разработаны варианты структурных схем устройства. Рассмотрены достоинства и недостатки обеих схем. В соответствии с требованиями выбрана наиболее пригодная. Разработаны макеты основных элементов приемного устройства. Проведены экспериментальные исследования с целью определения характеристик реального устройства. Выявлены основные проблемы. Решены проблемы защиты каскадов устройства от сигналов высокой мощности, разработаны система автоматической регулировки усиления, система контроля входной мощности. Решены проблемы возникновения паразитных обратных связей внутри корпуса блока РСА. Готовое устройство отвечает предъявляемым к нему требованиям, пригодно для использования в составе РСА БПЛА. Материалы статьи докладывались на 1-й микроволновой конференции, проходившей в ИРЭ им. В.А.Котельникова РАН в ноябре 2013 г.
Ключевые слова: радиолокатор, радиолокатор с синтезированной апертурой, беспилотный летательный аппарат, разрешающая способность радиолокатора.
Abstract: The research objective is a high resolution SAR receiver. The ability to create this device for UAV discovers in the process of research. Problems of device designing and debugging are identified, the search for solutions is performed. Review of existing devices has been performed. Variants of structural schematics of the device have been designed. The advantages and disadvantages of both schemes have been considered. According to the requirements the most suitable scheme is selected. Models of receiver elements have been designed. Experiments have been performed to determine the characteristics of a real device. The main problems have been identified. Problems of protection of circuit input of high power signals have been solved. Automatic gain control system and input power control system have been designed. Parasitic feedback inside the case of SAR problems has been solved. Completed device meets its requirements, is suitable for use in UAV SAR.
Key words: radar, synthetic aperture radar, unmanned aerial vehicle, radar resolution.
РСА - радиолокатор с синтезированной апертурой, - позволяет при малых размерах излучающей антенны получить высокую разрешающую способность за счет сбора и обработки сигналов, принятых из различных точек положения радиолокатора.
Область применения РСА широка: геодезические, топографические исследования, создание банков радиолокационных характеристик, разведка границ и исследование свойств лесных массивов, обнаружение существующих и перспективных судоходных каналов в ледниковых образованиях, поисково-спасательные работы, разведка местоположения морских судов.
На сегодняшний день является актуальным вопрос внедрения технических решений в беспилотные летательные аппараты. Установка на борт БПЛА радиолокатора обеспечит сбор информации о земной поверхности в широком спектре погодных условий, на местности, где нет возможности взлета пилотируемых летательных аппаратов, в облачную и туманную погоду, в темное время суток. Однако, технические средства, которыми оснащается БПЛА, должны отвечать ряду специфических требований. В первую очередь – требования к массе и габаритам. Для эффективного выполнения задачи сканирования радиолокатор должен обладать так же высокой разрешающей способностью.
Снижение массогабаритных характеристик приводит к ряду проблем, важнейшей из которых является возникновение паразитных обратных связей внутри корпуса устройства. Поэтому существует задача определения возможности создания приемного устройства для РСА, который в силу массогабаритных характеристик требований по электромагнитной совместимости возможно установить на БПЛА.
Разработка отечественного бортового РСА для БПЛА является актуальной задачей, так как появление РСА БПЛА в среде отечественной техники позволит проводить обзор земной поверхности с использованием непилотируемых средств, что способствует решению задачи по проведению различного рода исследований (геодезических, топографических, биологических), поисково-спасательных работ. РСА может быть использован с целью накопления базы радиолокационных характеристик различных объектов, обнаружения судоходных путей в ледниковых массивах.
В ходе исследования выполнялась задача поиска оптимального решения для приемного устройства РСА БПЛА, экспериментальное определение свойств и характеристик тракта и его отдельных функциональных узлов.
Разрешающая
способность радиолокатора с синтезированной апертурой зависит от ширины полосы
зондирующего сигнала, размеров излучающей антенны, требуемой дальности действия
[1]. Разрешающая способность по дальности ![]() связана с шириной полосы
зондирующего сигнала следующим соотношением:
связана с шириной полосы
зондирующего сигнала следующим соотношением:
![]() (1)
(1)
где
![]() -
скорость света (3·108 м/с),
-
скорость света (3·108 м/с), ![]() -
полоса зондирующего сигнала в Герцах (Гц). Для современных устройств
характерным значением разрешающей способности по дальности является 1 м.
-
полоса зондирующего сигнала в Герцах (Гц). Для современных устройств
характерным значением разрешающей способности по дальности является 1 м.
В соответствии с формулой (1) разрешающая способность по дальности не зависит от удаления зондируемого объекта от радиолокатора.
Разрешающая
способность по азимуту ![]() :
:
![]() (2)
(2)
где
![]() -
ширина двусторонней диаграммы направленности антенны радиолокатора (в
радианах),
-
ширина двусторонней диаграммы направленности антенны радиолокатора (в
радианах), ![]() -
дальность наблюдаемого участка до РСА. Для современных устройств характерным
значением разрешающей способности по дальности является 30 - 50 см.
-
дальность наблюдаемого участка до РСА. Для современных устройств характерным
значением разрешающей способности по дальности является 30 - 50 см.
Ширина двусторонней ДН:
![]() (3)
(3)
где
![]() -
длина волны радиолокатора,
-
длина волны радиолокатора, ![]() - размер антенны в
горизонтальной плоскости [2,3].
- размер антенны в
горизонтальной плоскости [2,3].
Исходя из (1-3), разрешающая способность напрямую зависит от несущей частоты зондирующего сигнала, а также от ширины полосы устройства обработки принятого сигнала (АЦП).
Следует отметить, что массогабаритные характеристики могут напрямую зависеть от электрических характеристик устройства. К примеру, несущая частота и рабочая полоса определяют геометрические размеры микрополосковых линий передач, фильтров, ответвителей и др. Современные малогабаритные РСА обладают массой до 4 кг.
С учетом результатов обзора, возникает необходимость постановки задачи по созданию РСА БПЛА с разрешающей способностью по азимуту: менее 30 см, по дальности менее 1 м. Масса готового устройства не должна превышать 4 кг.
При наличии современной элементной базы, малые расстояния между усилителями могут привести к неустранимому самовозбуждению схемы. Иногда самовозбуждение можно предотвратить, экранируя отдельные узлы блока РСА (если они находятся на достаточном расстоянии друг от друга), а также с использованием радиопоглощающего материала. Но данные меры приводят к увеличению массы устройства. Поэтому важно выбрать такие параметры РСА, при которых сохранится баланс между электрическими и массогабаритными характеристиками системы [4].
Неотъемлемой частью разработки аналогового блока РСА является проектирование приемного тракта. Приемный тракт в общем случае выполняет следующие функции:
1. усиление сигнала с приемной антенны,
2. фильтрация сигнала в рабочей полосе частот,
3. перенос спектра сигнала из области радиочастот в область низких частот,
4. усиление НЧ сигнала.
Помимо указанных задач, может также выполняться задача контроля мощности в некоторой точке тракта. Это обеспечивает возможность своевременно обезопасить каскады приемного устройства от сигналов большой мощности.
При высокой чувствительности устройства в приемном тракте также должна быть предусмотрена регулировка коэффициента передачи. Это необходимо для обеспечения работоспособности блока при работе РСА на различных высотах.
АЧХ приемного тракта должны быть как можно более равномерными в рабочей полосе частот. Это связано с необходимостью последующей корреляционной обработки принятой последовательности.
В некоторых случаях целесообразно разделять НЧ-сигнал (на выходе демодулятора) на два квадратурных канала с целью их последующей раздельной корреляционной обработки. Результаты корреляции обрабатываются уже совместно, за счет чего можно повысить достоверность детектирования и определения координат.
На базе опыта разработки, с учетом требований тенденции развития современных РСА [5,6], а так же знаний основ построения радиотехнических систем можно составить техническое задание (ТЗ) на разработку приемного тракта:
1. Входное сопротивление согласовано на 50 Ом. КСВН входа не более 1,5.
2. fc=9500 ± 500 МГц, fНЧ=0 ÷ 500 МГц.
3. Чувствительность приемного тракта ≤ -80 дБм
4. Кш ≤ 2.2дБ
5. Неравномерность АЧХ (∆S) в рабочей полосе не должна превышать 1,5 дБ.
6. Наличие квадратурных каналов демодулятора для дальнейшей обработки. Разброс между каналами (∆С) не более 0,5 дБ.
7. В СВЧ части приемного тракта должна быть предусмотрена регулировка усиления не менее 25дБ.
8. В СВЧ части приемного тракта должна быть предусмотрена система автоматической регулировки усиления с целью исключения выхода из строя каскадов приемника в случае поступления сигналов большой мощности.
9. Обеспечить минимально возможные массогабаритные характеристики устройства.
Был составлен первый вариант структурной схемы приемного тракта (рисунок 1). На данной схеме указаны основные параметры элементов с учетом выбранной элементной базы и последовательность их размещения в составе устройства. Отличительной особенностью данной схемы является наличие ограничителя мощности, двух петлей обратной связи, предназначенных для работы системы автоматической регулировки усиления (АРУ). Первая система АРУ предназначена для предотвращения выхода из строя входных каскадов приемного устройства (микросхем малошумящих усилителей - МШУ), вторая – для предотвращения выхода из строя демодулятора. Среди преимуществ данной схемы следует отметить её возможности по предотвращению выхода из строя основных каскадов устройства, а так же большой диапазон перестройки коэффициента передачи. Имеется возможность изменения коэффициента передачи в диапазоне от 0 до 60 дБ посредством управления аттенюатором (АТТ), что может осуществляться как автоматически (при работе системы АРУ), так и посредством команд оператора. В качестве промежуточного усилителя используется любая микросхема усилителя мощности (на схеме представлена микросхема HMC608lp4), удовлетворяющая требованиям по рабочему диапазону частот, входной мощности и коэффициенту усиления. Среди недостатков данной схемы следует отметить низкий коэффициент усиления (ввиду наличия большого числа элементов, вносящих потери), сложность проектирования устройства на её основе (ввиду наличия двух систем АРУ, не связанных друг с другом, а так же большого числа других элементов) и сложность настройки готового устройства. Наличие большого числа элементов также приводит к увеличению массогабаритных характеристик устройства. Наличие двух систем АРУ обуславливает увеличение времени срабатывания системы, а также сложность их моделирования и регулировки. Положение НО (направленного ответвителя) на входе устройства приводит к росту коэффициента шума, что является существенным недостатком для разрабатываемого устройства.
С учетом всех имеющихся преимуществ и недостатков схемы по первому варианту, был разработан второй вариант структурной схемы устройства (Рисунок 2). На данной схеме имеется одна ветвь обратной связи для системы АРУ. Это обеспечивает возможность сравнительно простого моделирования и настройки системы. Положение НО позволяет работать системе АРУ таким образом, чтобы предотвратить выход из строя всех основных каскадов устройства. Динамический диапазон устройства равен 90 дБ, что достигается путем использования микросхем МШУ с перестраиваемым коэффициентом передачи в качестве промежуточных усилителей. Регулировка коэффициента передачи также осуществляется путем изменения параметра затухания управляемого аттенюатора. Стоит отметить, что расположение ППФ (полосно-пропускающего фильтра) после первого каскада МШУ обусловлено необходимостью повышения шумовых характеристик устройства. ППФ в свою очередь обладает потерями. Расположение его на входе приемного тракта приведет к росту коэффициента шума. Характеристики НО и ППФ выбраны в соответствии с техническим заданием и структурной схемой тракта. По заданным характеристикам проведен выбор типа и расчет параметров данных элементов.
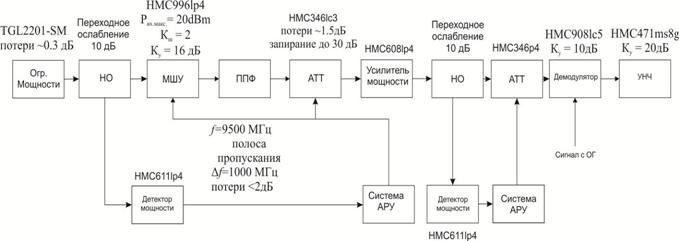
Рис. 1. Структурная схема устройства (Вариант 1)
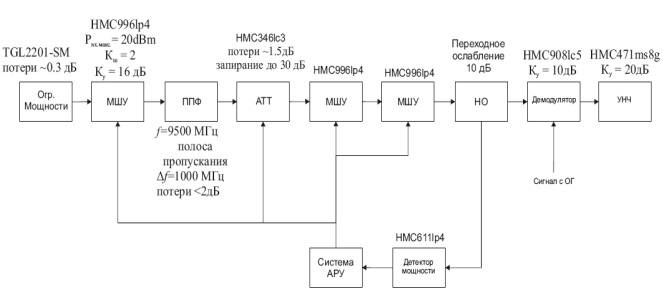
Рис. 2. Структурная схема устройства (Вариант 2)
В результате проработки было принято решение использовать второй вариант структурной схемы в качестве основы для разработки приемного устройства.
На базе структурной схемы приемного тракта были разработаны ячейки устройства. С целью исключения взаимного влияния элементов было принято решение разделить тракт на два функциональных узла (ячейки). В состав первой ячейки (ячейки приемника) вошли: три МШУ, ППФ, ограничитель мощности, аттенюатор, направленный ответвитель, логарифмический детектор мощности. В состав второй ячейки (ячейки демодулятора) входят микросхема демодулятора и двухканального усилителя мощности.
Испытания ячеек проводились как в специально изготовленном алюминиевом корпусе в составе аналогового радиочастотного блока (АРБ), так и вне состава блока.
В соответствии со структурной схемой приемного тракта была разработана принципиальная схема и топология (Рисунок 3) ячейки приемника. На базе разработанной топологии была изготовлена печатная плата устройства, проведен монтаж элементов.
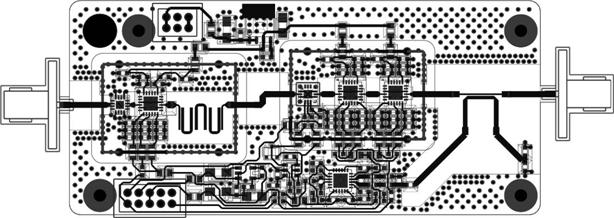
Рис. 3. Топология ячейки приемника.
В ходе разработки ячейки приемника было установлено, что ввиду большого коэффициента усиления (40 дБ) система склонна к самовозбуждению. Кроме того, в диапазоне частот КРРСА необходимо учитывать эффект возникновения паразитных резонансов в металлическом корпусе устройства в случае, когда габариты ячейки будут кратны целому числу полуволн рабочего диапазона частот.
Экспериментально подтвержден факт возникновения паразитных колебаний, что существенно ухудшает характеристики устройства. Для устранения эффекта самовозбуждения схемы было принято решение разместить некоторые её участки внутри металлических экранов, другие части схемы разделить перемычками, выполненными из тонкой жести для облегчения конструкции, как показано на рисунке 4.
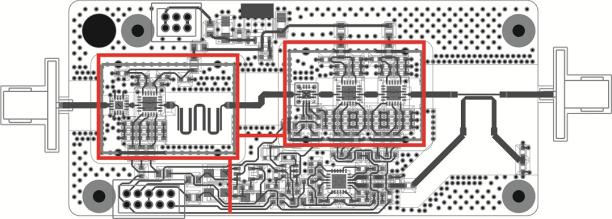
Рис. 4. Экранирование ячейки приемника.
Один из экранов охватывает ограничитель мощности, МШУ, ППФ, другой – аттенюатор и два последующих МШУ. Пространство между экранами было разделено жестяными перемычками. Принятые меры лишь незначительно способствовали улучшению характеристик устройства и не решали проблемы самовозбуждения.
В качестве возможного решения было предложено накрывать экранированные участки схемы радиопоглощающим материалом. Экспериментальным путем была определена наиболее чувствительная зона (область, в которой использование поглотителя приводит к устранению самовозбуждения) – пространство в пределах ограниченных экраном слева (рисунок 4). Однако плотное примыкание поглотителя к ППФ приводит к неработоспособности тракта. Поэтому было принято решение покрывать радиопоглощающим материалом крышки экранов с внутренней стороны. Также в ходе экспериментов было установлено, что наличие перемычек не способствует устранению самовозбуждения приемника, и их было решено убрать.
Помимо указанных мер по борьбе с самовозбуждением внутри корпуса, крышку корпуса блока было решено покрыть радиопоглощающим материалом. Однако это не решило проблемы полностью. В ходе экспериментов установлено, что плата приемника не имеет достаточно плотного контакта с корпусом, вследствие чего возникают паразитные колебания. Использование фольги между платой и корпусом позволило устранить эффект самовозбуждения.
В соответствии со структурной схемой приемного тракта была разработана принципиальная схема и топология ячейки демодулятора (Рисунок 5), проведено изготовление печатной платы, монтаж элементов.
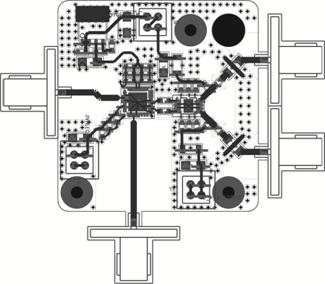
Рис. 5. Топология ячейки демодулятора.
В ходе испытаний приемного тракта (Рисунок 6) в составе аналогового блока РСА было установлено, что в спектре сигнала на выходе приемного тракта (т.е. ячейки демодулятора), присутствуют комбинационные составляющие синтезатора частот. Для их подавления использованы LC-фильтры низких частот. Помимо этого обнаружено, что сигнал гетеродина (9,5 ГГц) попадает на элементы приемного тракта и оказывает влияние на работу системы АРУ (на вход логарифмического детектора приходит больше мощности, чем ожидается). Для устранения данного эффекта использовались металлические перегородки между отсеками демодулятора и синтезатора с отверстиями для линии передач.

Рис. 6. Приемный тракт РСА.
Неравномерность АЧХ приемного тракта без регулировки составляла 3,5 дБ, разброс между каналами превышал 1 дБ.
Для устранения данного эффекта проводился перерасчет емкостей цепей питания усилителя низких частот, а также расчет и экспериментальная проверка резистивного аттенюатора на выходе одного из каналов (для компенсации разброса между каналами).
В ходе стыковочных испытаний с подключением блока цифровой обработки установлено, что в штатном режиме сигнал с выхода приемного тракта, указанный в ТЗ, перегружает АЦП. В результате было принято решение отказаться от использования усилителя промежуточных частот. Данное решение также позволило выровнять АЧХ до 1 дБ неравномерности. Это обусловлено тем, что цепи питания усилителя подсоединялись в СВЧ линию передач и содержали реактивные элементы, влияющие на характеристику тракта.
В результате последующих измерений АЧХ были получены следующие зависимости:
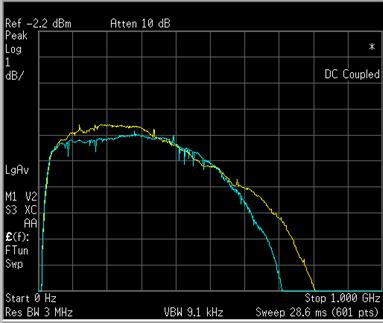
Рис. 7. АЧХ ПРМ I-канала, желтая– 8,5…9,5 ГГц, голубая –9,5…10,5 ГГц.
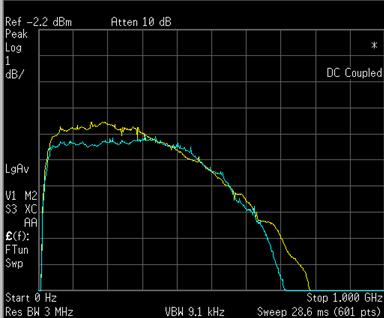
Рис. 8. АЧХ ПРМ Q-канала, жёлтая – 9,5…10,5 ГГц, голубая – 8,5…9,5 ГГц.
В
результате измерения коэффициента шума, получили следующую характеристику
(Рисунок 9):
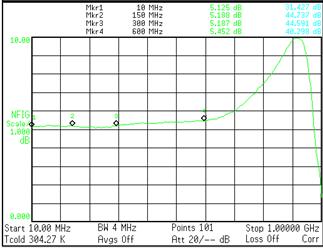
Рис. 9. Результаты измерения коэффициента шума тракта.
При рассмотрении результатов измерения коэффициента шума следует учитывать, что входной сигнал приемника делится на два квадратурных канала. Это обязывает вычитать 3 дБ из коэффициента шума, полученного в результате измерений.
В ходе стыковочных испытаний с применением цифрового блока обработки, были получены характеристики корреляции при подаче на вход приемника модулированной последовательности.
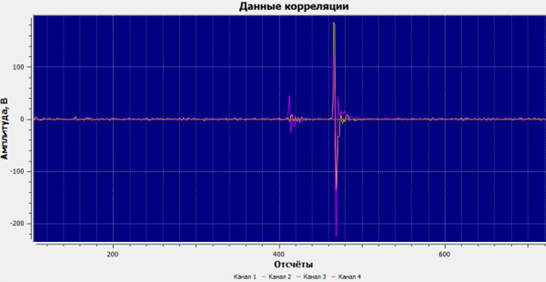
Рис. 10. Данные корреляции при приеме кодовой последовательности.
Из рисунка 10 видно, что при обработке сигнала на корреляционной характеристике появляются выраженные максимумы. Это свидетельствует о корректной работе приемного устройства. Так же проводились испытания с увеличением электрической длины линии задержки между передающим и приемным трактом. В ходе испытаний оценивалась разрешающая способность устройства по дальности. В результате получили, что разрешающая способность устройства составляет 0,25 м.
В ходе проектирования системы АРУ было предложено несколько вариантов реализации. В зависимости от того, какая из этих схем будет обладать большим быстродействием, стабильностью работы, будет наиболее простая на этапе проектирования и менее финансово затратная, определиться вариант реализации пригодный для использования в составе приемного тракта.
Для реализации возможности плавной регулировки коэффициента передачи тракта в зависимости от входной мощности была разработана схема, представленная на рисунке 11. В основе схемы лежит использование пяти операционных усилителей. Первый выполняет функцию согласования выходного сопротивления детектора с сопротивлением схемы АРУ. Второй ОУ предназначен для сдвига уровня управляющего напряжения. Третий ОУ выполняет функцию инвертирования напряжения (перенос в отрицательную область). Четвертый и пятый служат для формирования динамических диапазонов для аттенюатора и МШУ соответственно.
Для макетирования системы АРУ была разработана электрическая принципиальная схема и топология макета, изготовлена печатная плата (Рисунок 12), проведен монтаж элементов.
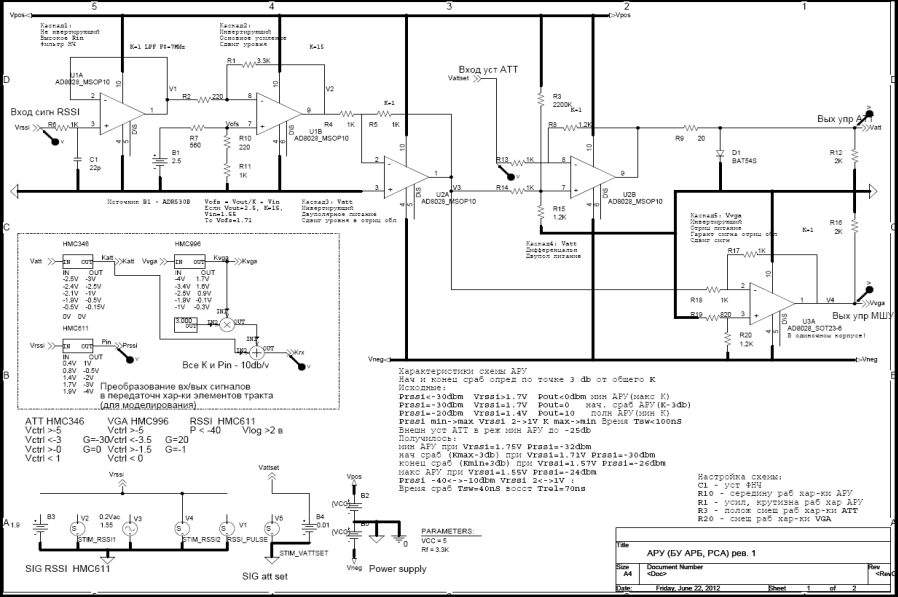
Рис. 11. Схема АРУ.
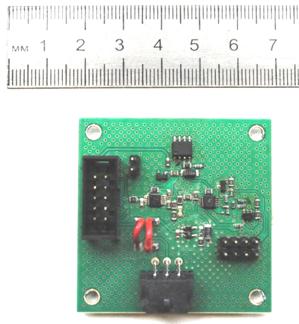
Рис. 12. Макет АРУ.
В результате измерений получили следующие зависимости:
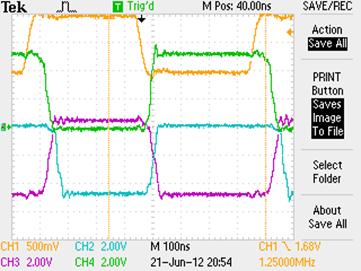
Рис. 13. Осциллограмма напряжений макета системы АРУ
(— - напряжение на входе схемы АРУ (с выхода
детектора мощности), — - неинвертированное
управляющее напряжение аттенюатора, — -
управляющее напряжение МШУ, — - управляющее
напряжение аттенюатора)
Из полученных результатов были сделаны следующие выводы:
Время срабатывания системы АРУ составляет 40 нс. Необходимо провести испытания на определение работоспособности каскадов приемного тракта при полученном времени срабатывания системы автоматической регулировки усиления.
При проверке работоспособности системы АРУ, размещенной на плате управления аналогового блока РСА, получились результаты, приведенные в таблице 1.
Таблица 1
|
Pin, дБмВт |
Pout, дБмВт |
K усил, дБ |
|
-60 |
-10 |
50 |
|
-55 |
-6,5 |
48,5 |
|
-50 |
-5 |
45 |
|
-45 |
-4 |
41 |
|
-40 |
-4 |
36 |
|
-35 |
-3 |
32 |
|
-30 |
-3 |
27 |
|
-20 |
-2 |
18 |
|
-10 |
-2 |
8 |
В ходе испытаний системы АРУ в составе аналогового блока РСА установлено качественное соответствие характеристики работы изготовленной системы АРУ, представленной на рисунке 14.
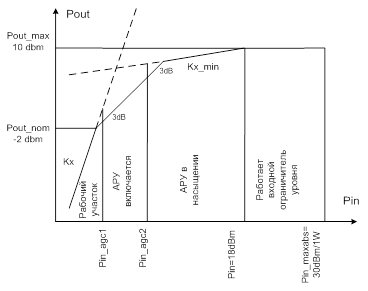
Рис. 14.
Характеристика работы системы АРУ.
В штатном режиме работы основные параметры характеристики принимают следующие значения:
Pin_agc1 = - 60 дБм – мощность на входе приемного тракта, при которой происходит срабатывание АРУ. Определяется как входная мощность, при которой происходит снижения усиления тракта на 3 дБ (усиление тракта определяется как Pout-Pin).
Pin_agc2 = - 10 дБм – мощность на входе приемного тракта, при которой АРУ переходит в режим насыщения. Определяется как входная мощность, при которой усиление тракта выше минимального на 3 дБ.
Pout_max = 10 дБм – максимальная мощность на выходе устройства.
Kx_min = - 8 дБм – минимальный коэффициент передачи тракта.
В ходе испытаний также проводилась проверка работоспособности приемного тракта при подаче импульсного воздействия высокой мощности при включенной системе АРУ. В соответствии с результатами опыта можно утверждать, что приемный тракт сохраняет работоспособность при импульсном воздействии. Быстродействия системы АРУ достаточно, чтобы предотвратить выход из строя основных каскадов устройства.
Совокупность полученных результатов позволяет утверждать, что система АРУ пригодна для использования в составе аналогового блока РСА с целью защиты приемного тракта в случае попадания на вход сигналов высокой мощности при условии, что АЦП блока обработки способен выдерживать входную мощность до 10 дБм.
Проводились испытания радиолокатора с синтезированной апертурой, в состав аналогового блока (рисунок 15) которого входит разработанное приемное устройство. Радиолокационное изображение и снимок местности приведены на рисунке 15. Из данного рисунка видно, что полученное радиолокационное изображение в точности соответствует снимкам местности, сделанным со спутника. На РЛИ детально отображены ключевые элементы местности, отчетливо видны основные объекты.
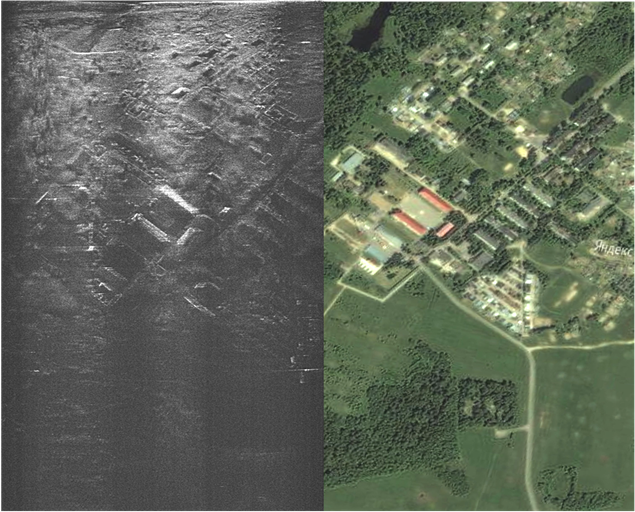
Рис. 15. Радиолокационное изображение (слева) и снимки местности (справа).
Готовое устройство обладает следующими характеристиками:
1. Входное сопротивление согласовано на 50 Ом. КСВН входа 1,4.
2. fc=9500 ± 500 МГц, fНЧ=0 ÷ 500 МГц.
3. Чувствительность приемного тракта -100 дБм
4. Кш 2,1 дБ
5. Неравномерность АЧХ в рабочей полосе 1 дБ.
6. Разброс между квадратурными каналами менее 0,5 дБ.
7. В СВЧ части приемного тракта предусмотрена регулировка усиления в 27 дБ.
8. Время срабатывания системы автоматической регулировки усиления 40 нс.
9. Размеры устройства (плат приемного тракта): ячейка «приемник» 85x38 мм, ячейка “демодулятор» 36х38 мм.
10.Исходя из этого, можно утверждать, что разработанное устройство обладает характеристиками, отвечающими требованиям тенденций развития современных РСА, пригодно для использования в составе радиолокационных систем высокого разрешения.
11.Разрешающая способность РСА БПЛА по дальности 30 см, по азимуту 28см. Масса радиолокатора составляет 3,5 кг.
В результате исследования установлено, что доступная элементная база, методы устранения паразитных колебаний и резонансов, технологические ограничения при изготовлении печатных плат позволяют создать РСА для БПЛА, превосходящее по характеристикам зарубежные аналоги. В ходе работы выявлены основные проблемы проектирования данного типа устройств, предложены методы решения и возможные реализации.
1. Чистюхин В.В. «Антенно-фидерные устройства», М.,1997
2. Незлин Д.В. Радиотехнические системы, М. МИЭТ 2008
3. Нейман П.И. «Особенности характеристик и применения авиационных РСА» Геоматика №3, 2011 г.
4. Нейман П.И., Нейман И.С. «Особенности построения и основные характеристики радиолокаторов с синтезированной апертурой. Часть 1. Космические РСА. Часть 2. Авиационные РСА. Научно-технический отчет ОАО «НИИ ТП», 2010.
5. A.R. Brenner, J.H. G. Ender «Airborne SAR Imagingwith Subdecimeter Resolution. Proceedings of EUSAR», 2006.
6. H. Cantalloube, P. «Dubois-Fernandez Airborne X-band SAR imaging with 10 cm resolution – Technical challenge and preliminary results. Proceedings of EUSAR», 2004.