УДК 539.371, 538.911
ИССЛЕДОВАНИЕ СИЛОВЫХ ХАРАКТЕРИСТИК МИКРОАКТЮАТОРА С ЭФФЕКТОМ ПАМЯТИ ФОРМЫ ПРИ ПОМОЩИ СКАНИРУЮЩЕЙ ЗОНДОВОЙ МИКРОСКОПИИ
П. В. Мазаев1, А. В. Маширов1, В. В. Коледов1, Д. В. Колесов2, И. В. Яминский2, А. В. Иржак3,4, Д. И. Захаров3, В. А. Дикан3, А. П. Каманцев1
1 - Институт радиотехники и электроники имени В.А. Котельникова РАН
2 - Московский государственный университет имени М.В. Ломоносова
3 - Национальный исследовательский технологический университет «МИСиС»
4 - Институт проблем технологии микроэлектроники и особочистых материалов РАН
Статья получена 10 декабря 2014 г.
Аннотация. Недавно методом селективного ионного травления были созданы микро- и наноразмерные инструменты на основе композитов с эффектом памяти формы (ЭПФ). Перспектива их широкого применения для решения различных задач наноманипулирования, нанообработки, наноизмерений продемонстрирована в результате экспериментов по переносу при помощи композитного нанопинцета углеродных нанотрубок и наночастиц различной природы. В настоящей работе изучаются силовые характеристики композитных микроактюаторов с ЭПФ. Создана методика определения термоупругих свойств микроразмерных композитных актюаторов с ЭПФ на основе методики калибровки жесткости кантилеверов в сканирующей зондовой микроскопии. Экспериментально определена жесткость образцов микроактюаторов на основе композита Ti2NiCu/Pt с длиной 45…51 мкм, шириной 1,9…2,5 мкм, толщиной 1 мкм в температурном диапазоне 20…100°С. Проведены количественные оценки силы воздействия микроактюатора на микрообъект на основе экспериментальных данных. Экспериментальные данные хорошо согласуются с теоретическим расчетом.
Ключевые слова: эффект памяти формы, микроманипулятор, наноманипулятор, нанопинцет, Ti2NiCu, композит, микроактюатор, кантилевер, сканирующая зондовая микроскопия, жесткость.
Abstract. Recently the micro- and nanoscale manipulation instruments based on shape memory effect (SME) have been created by the method of selective ion etching. Possibilities of the extensive use for various tasks of nanomanipulation, nanoprocessing, nanomeasuring have been demonstrated through experiments of the transfer of the carbon nanotubes and nanoparticles of different nature by the composite nanotweezers. In this paper the force characteristics of the composite microactuators with SME are studied. The thermoelastic properties measurement technique for microscale composite actuators with SME based on stiffness calibration of scanning probe microscopy cantilevers technology has been developed. The stiffness of the microactuator’s samples based on Ti2NiCu / Pt composite with a length of 45...51 μm, a width of 1,9...2,5 μm, a thickness of 1 μm at a temperature in the range of 20...100°C has been experimentally determined. Quantitative estimates of the interaction force between the actuator and the test object based on experimental data have been calculated. The experimental and theoretical calculations do not disagree.
Keywords: shape memory effect, micromanipulator, nanomanipulator, nanotweezers, Ti2NiCu, composite, actuator, cantilever, atomic force microscopy, scanning probe microscopy, stiffness.
Введение
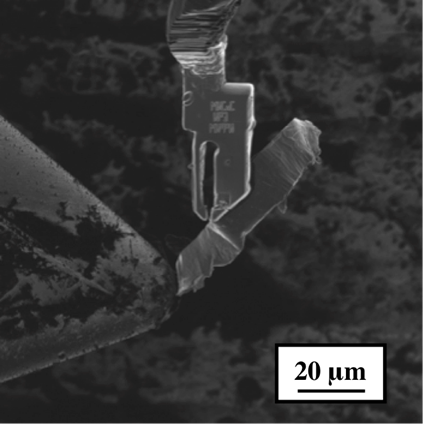
В наши дни направления науки и техники, связанные с нанотехнологиями и нанообъектами, уже не просто считаются перспективными, но и полноценно внедряются в современное производство. Ввиду необходимости манипулирования объектами в нанообласти размеров был создан целый новый класс микромеханических устройств, которые принято называть микро- и нанопинцетами. Одним из представителей этого класса устройств является нанопинцет на основе ЭПФ, изображенный на рис. 1 [1-7].
|
|
|
Рис. 1. Нанопинцет на основе композита с ЭПФ. |
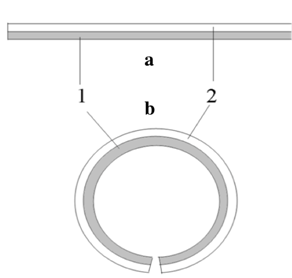
Принцип работы нанопинцета на основе ЭПФ показан на рис. 2. Использование композита, состоящего из предварительно деформированного сплава с односторонним ЭПФ, покрытого слоем упругого материала, позволяет добиться контролируемой деформации даже при отсутствии специальной тренировки сплава на двухсторонний ЭПФ. Среди достоинств данной схемы следует отметить простоту конструкции, рекордно малые размеры и удобный температурный диапазон активации (20…60°С), что позволяет работать даже с биологическими объектами. Однако, при манипулировании с помощью нанопинцета необходимо знать и контролировать силу его воздействия на объект, так как можно либо испортить объект при слишком сильном воздействии, либо потерять его из-за слабого нажатия.
|
|
|
Рис. 2. Принцип работы композита с ЭПФ. а – недеформированный до нагрева; b – изгиб при нагреве; 1 – упругий слой; 2 – слой сплава с ЭПФ. |
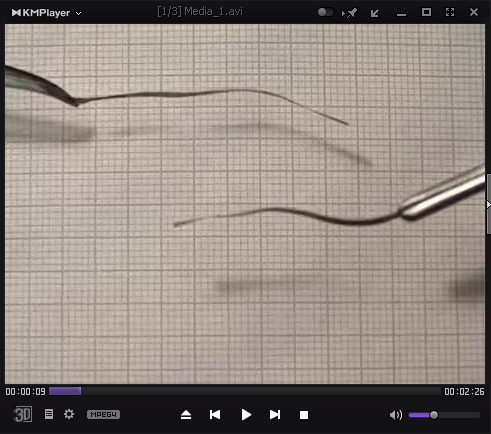
Медиа-файл
1. Композитные ленты, деформирующиеся за счет контакта с нагретой поверхностью.
Для просмотра видео-файла воспользуйтесь ссылкой здесь.
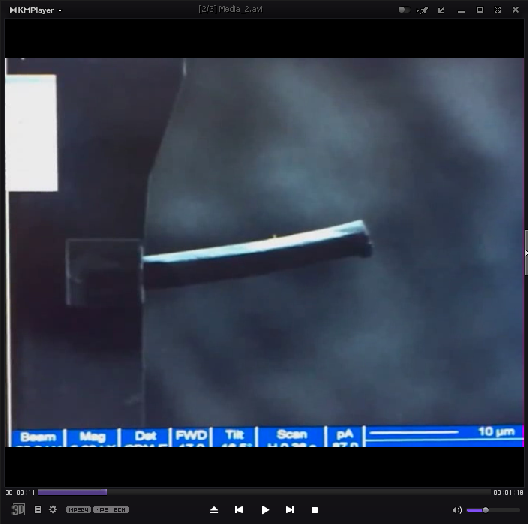
Медиа-файл
2. Композитный микроактюатор на основе сплава NiMnGa с магнитным ЭПФ.
Для просмотра
видео-файла воспользуйтесь ссылкой здесь.
Цель данной работы – получение информации о силе воздействия композитного микроактюатора на исследуемый объект.
1. Методика эксперимента
В практике сканирующей зондовой микроскопии (СЗМ) часто встречается необходимость измерения и калибровки жесткости используемых в микроскопах кантилеверов [8]. Ввиду схожести микроактюаторов по форме и размерам с прямоугольными кантилеверами СЗМ существует возможность применять для них схожие и уже отработанные методы градуировки. В статье [8] подробно описывается способ подобной калибровки под названием «метод образцового кантилевера» (рис. 3).
|
|
|
Рис. 3. Экспериментальная модель измерения образцовым кантилевером. 1 – тестовый кантилевер; 2 – образцовый кантилевер; 3 – кремниевый чип. |
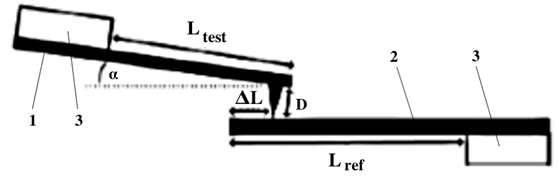
Метод образцового кантилевера градуирует кантилевер с неизвестной константой жесткости путем построения зависимости «нагрузка-перемещение» под воздействием тщательно откалиброванного кантилевера. На рис. 3 верхний кантилевер является измеряемым, в то время как нижний – измеряющий образцовый кантилевер. Следовательно, если в качестве верхнего кантилевера использовать образцовый кантилевер, а вместо нижнего – микроактюатор, то возможно определить коэффициент жесткости микроактюатора методом «перевернутого» образцового кантилевера (рис. 4).
|
|
|
Рис. 4. Схема перевернутого метода образцового кантилевера. 1 – образцовый кантилевер; 2 – микроактюатор; 3 – кремниевый чип. |
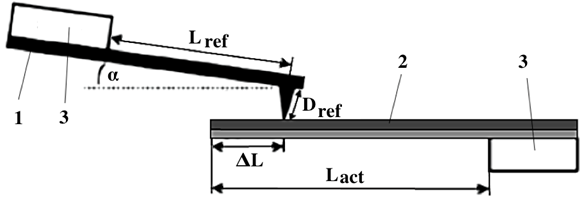
Выражение для жесткости микроактюатора, выведенное на основе [8]:
|
|
(1) |

где ![]() – коэффициент жесткости образцового
кантилевера;
– коэффициент жесткости образцового
кантилевера;
![]() – усредненный обратный угловой
коэффициент линейной зависимости «нагрузка-перемещение» (например, в нм/мВ),
полученной при взаимодействии микроактюатора и образцового кантилевера (рис. 5);
– усредненный обратный угловой
коэффициент линейной зависимости «нагрузка-перемещение» (например, в нм/мВ),
полученной при взаимодействии микроактюатора и образцового кантилевера (рис. 5);
![]() – усредненный обратный угловой
коэффициент линейной зависимости «нагрузка-перемещение», полученной при усилии
образцового кантилевера на твердую поверхность кремниевого чипа;
– усредненный обратный угловой
коэффициент линейной зависимости «нагрузка-перемещение», полученной при усилии
образцового кантилевера на твердую поверхность кремниевого чипа;
![]() – высота наконечника образцового
кантилевера;
– высота наконечника образцового
кантилевера;
![]() – длина образцового кантилевера;
– длина образцового кантилевера;
![]() – длина микроактюатора от его основания;
– длина микроактюатора от его основания;
![]() – расстояние от конца микроактюатора
до места его контакта с образцовым кантилевером.
– расстояние от конца микроактюатора
до места его контакта с образцовым кантилевером.
Множитель ![]() необходим,
так как кантилевер может быть установлен под углом
необходим,
так как кантилевер может быть установлен под углом ![]() к поверхности, что типично для конструкций СЗМ.
к поверхности, что типично для конструкций СЗМ.
Множитель ![]() отвечает
за крутящий момент, создаваемый высотой наконечника.
отвечает
за крутящий момент, создаваемый высотой наконечника.
|
|
|
Рис. 5. Пример зависимости «нагрузка-перемещение», полученный при взаимодействии образцового кантилевера с твердой поверхностью и с микроактюатором [9]. |

Множитель ![]() необходим,
так как жесткость микроактюатора возрастает при уменьшении длины рычага балки:
необходим,
так как жесткость микроактюатора возрастает при уменьшении длины рычага балки:
|
|
(2) |
где ![]() -
жесткость микроактюатора с длиной
-
жесткость микроактюатора с длиной ![]() ,
,
![]() -
жесткость микроактюатора с длиной
-
жесткость микроактюатора с длиной ![]() .
.
2. Экспериментальная установка
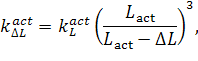
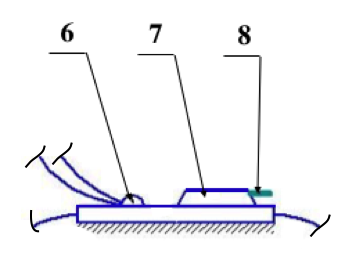
Экспериментальная установка спроектирована на базе СЗМ «ФемтоСкан» [10]. Экспериментальная установка представляет собой нагреватель 1 с термопарой 6, которые устанавливаются на массивное основание СЗМ 2 (рис. 6, 7). Образцовый кантилевер закреплен в держателе 3 головного блока СЗМ, установленного над нагревателем. С помощью лазера 4 подается сигнал, который отражается от образцового кантилевера и попадает на фотоприемник 5. На нагревателе находится кремниевый чип 7 с закрепленным на нем микроактюатором 8. Контакт микроактюатора и СЗМ-кантилевера производится путем грубого и точного подвода столика с образцом к зонду. Грубый подвод осуществляется шаговым двигателем, точный – пьезокерамической трубкой.
|
|
|
Рис.
6.
Схема экспериментальной установки. |
|
|
|
Рис. 7. Схема нагревательного столика. 6 – термопара; 7 – кремниевый чип; 8 – микроактюатор. |
3. Экспериментальные образцы
Биметаллические микроактюаторы были выполнены из слоя сплава Ti2NiCu с ЭПФ, полученного методом спиннингования [3, 4], на который методом ионно-стимулированного осаждения из газовой фазы нанесен упругий слой аморфной платины. Технология изготовления композита Ti2NiCu / Pt подробно описана в работах [2, 5].
Процесс создания экспериментальных образцов микроактюаторов в камере прибора фокусированного ионного пучка (ФИП) можно разделить на следующие этапы:
1. Создание упругого металлического слоя на поверхности предварительно деформированной ленты из сплава Ti2NiCu с ЭПФ с помощью ионно-стимулированного осаждения платины.
2. Формирование биметаллической балки микроактюатора с помощью травления быстрозакаленной ленты Ti2NiCu.
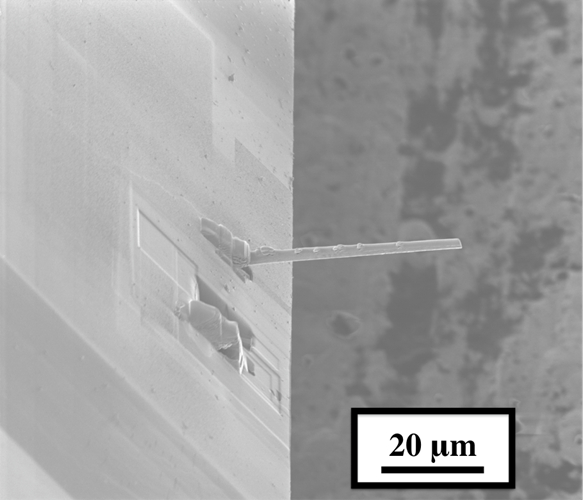
3. Отсоединение и перенос микроактюатора на кремниевый чип с помощью манипулятора «OmniProbe» (рис. 8).
|
|
|
Рис. 8. ФИП-изображение процесса переноса микроактюатора на кремниевую подложку. |
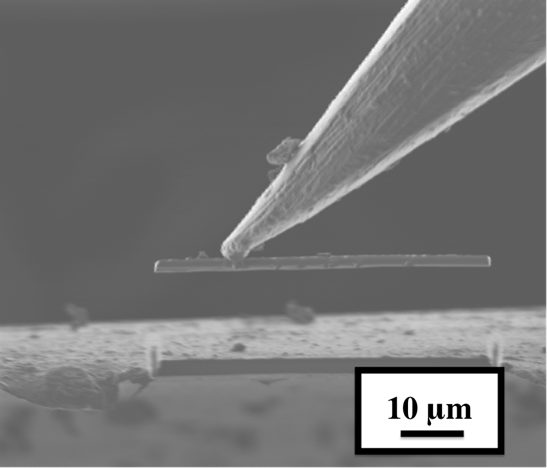
По технологии, описанной выше, было изготовлено три микроактюатора (табл. 1). В качестве примера на рис. 9 представлено изображение микроактюатора №1.
|
Таблица 1. Размеры микроактюаторов |
|
|||
|
№ |
Длина, мкм |
Ширина, мкм |
Толщина, мкм |
Соотношение толщин упругого и ЭПФ-слоев |
|
1 |
45 ± 0,5 |
2,4 ± 0,1 |
≈ 1 |
≈ 1:1 |
|
2 |
51 ± 0,5 |
2,5 ± 0,1 |
||
|
3 |
43 ± 0,5 |
1,9 ± 0,1 |
||
|
|
|
Рис. 9. ФИП-изображение микроактюатора №1. |
4. Описание эксперимента
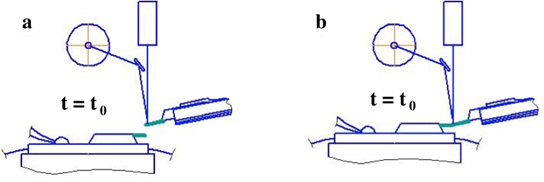
После установки нагревателя с образцом на основании зондового микроскопа происходит грубая подводка микроактюатора к кантилеверу. При расстоянии между микроактюатором и кантилевером порядка 50 мкм грубый подвод сменяется точным. Этот момент можно считать начальным положением (рис. 10.а). Точный подвод идет до момента касания микроактюатора и кантилевера (рис. 10.b). Момент касания регистрируется по показаниям фотодиода, а также контролируется визуально (с помощью светового микроскопа). Момент касания считается отправной точной для измерения. После этого по заданной программе происходит движение столика (рис 10.c) по вертикальной оси на заданную величину (как правило, составляющую несколько мкм). Это приводит к изменению сигнала на фотодиоде и позволяет построить зависимость значения сигнала на фотодиоде от перемещения столика. После построения зависимости столик отводят в начальное положение на расстояние порядка 50 мкм (рис. 10.d) и изменяют температуру нагревателя (рис. 10.e). После этого эксперимент повторяют снова.
|
|
|
Рис. 10. Схема эксперимента. а) Начальное положение; b) момент касания; c) измерение жесткости и построение зависимости; d) отвод в начальное положение; e) изменение температуры. |
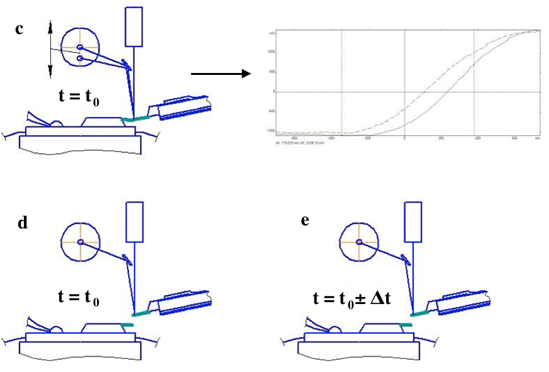

Медиа-файл 3. Иллюстрация схемы эксперимента. Для просмотра видео-файла воспользуйтесь ссылкой здесь.
|
|
|
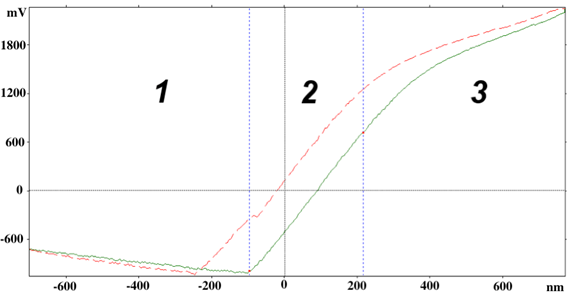
Рис. 11. Типовая зависимость сигнала от перемещения столика. 1 – область подвода микроактюатора к кантилеверу; 2 – линейная зависимость взаимодействия; 3 – область чрезмерного изгиба кантилевера. |
5. Результаты экспериментов
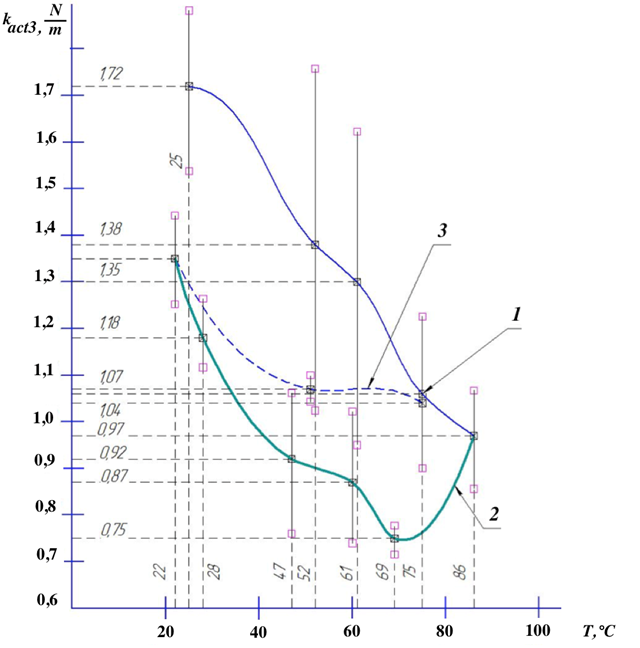
На основе полученных данных производился
расчет коэффициентов жесткости микроактюаторов ![]() (табл. 2). Данные показывают, что при
температуре выше 80°С жесткость микроактюаторов снижается примерно вдвое. Ввиду
погрешностей контакта кантилевера и микроактюатора, а также температурного
дрейфа, зависимости имеют нелинейный вид с локальным максимумами и минимумами.
На рис. 12 представлена наиболее исследованная типовая зависимость для
микроактюатора №3.
(табл. 2). Данные показывают, что при
температуре выше 80°С жесткость микроактюаторов снижается примерно вдвое. Ввиду
погрешностей контакта кантилевера и микроактюатора, а также температурного
дрейфа, зависимости имеют нелинейный вид с локальным максимумами и минимумами.
На рис. 12 представлена наиболее исследованная типовая зависимость для
микроактюатора №3.
|
|
|
Рис.
12. Зависимость коэффициента жесткости |
|
Таблица 2. Зависимость коэффициентов
жесткости |
|
|||||
|
Микроактюатор №1 |
Микроактюатор №2 |
Микроактюатор №3 |
||||
|
|
|
|
|
|
|
|
|
Нагрев |
||||||
|
22 |
6,35 ± 0,450 |
26 |
1,39 ± 0,146 |
25 |
1,72 ± 0,203 |
|
|
39 |
7,65 ± 0,702 |
40 |
1,05 ± 0,281 |
52 |
1,38 ± 0,406 |
|
|
48 |
8,61 ± 0,691 |
56 |
0,72 ± 0,075 |
61 |
1,30 ± 0,356 |
|
|
91 |
3,13 ± 0,472 |
91 |
0,85 ± 0,038 |
75 |
1,06 ± 0,200 |
|
|
|
|
|
|
86 |
0,97 ± 0,163 |
|
|
Охлаждение |
||||||
|
|
|
69 |
0,89 ± 0,107 |
69 |
0,75 ± 0,030 |
|
|
|
|
54 |
0,72 ± 0,048 |
60 |
0,87 ± 0,142 |
|
|
|
|
36 |
0,74 ± 0,093 |
47 |
0,92 ± 0,160 |
|
|
|
|
26 |
0,76 ± 0,166 |
28 |
1,18 ± 0,085 |
|
|
|
|
|
|
22 |
1,35 ± 0,114 |
|
|
Повторный нагрев |
||||||
|
|
|
|
|
51 |
0,75 ± 0,032 |
|
|
|
|
|
|
75 |
0,87 ± 0,398 |
|



Полученные данные показывают, что при повышении температуры жесткость всех микроактюаторов снижается примерно вдвое. Несмотря на большое количество различных помех при проведении эксперимента, а также на сложность осуществления контакта между микроактюаторами и кантилеверами, данная закономерность прослеживается для всех образцов. Это может объясняться либо систематической погрешностью либо возможными структурными механизмами: переориентировка мартенсита, находящегося в структуре ЭПФ-слоя микроактюатора даже при повышенной температуре (под действием внешнего напряжения, температура перехода аустенит – мартенсит сплава повышается), также возможны проявления сверхупругости.
6. Теоретический расчет силы
В статье [6] описывается теория композитного микроактюатора и приводится формула для определения силы, которую он создает если активация происходит при зафиксированном композите:
|
|
(5) |
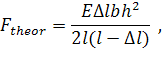
где Е – модуль упругости микроактюатора,
![]() – предварительное
удлинение ленты Ti2NiCu,
b, h, l – соответственно ширина, толщина и длина микроактюатора.
– предварительное
удлинение ленты Ti2NiCu,
b, h, l – соответственно ширина, толщина и длина микроактюатора.
Предварительная деформация ЭПФ-ленты
составляла ![]() Так как микроактюатор состоит из слоя Ti2NiCu и упругого слоя платины,
то в качестве значения модуля упругости следует принять приведенный модуль
упругости
Так как микроактюатор состоит из слоя Ti2NiCu и упругого слоя платины,
то в качестве значения модуля упругости следует принять приведенный модуль
упругости ![]() , учитывающий характеристики обоих
материалов [11]:
, учитывающий характеристики обоих
материалов [11]:
|
|
(6) |
Приближенно принимая ![]() , а
, а ![]() (для аустенита), получаем, что
(для аустенита), получаем, что ![]() .
.
В статье [6] приводится также формула для теоретического расчета прогиба микроактюатора в свободном состоянии:
|
|
(7) |
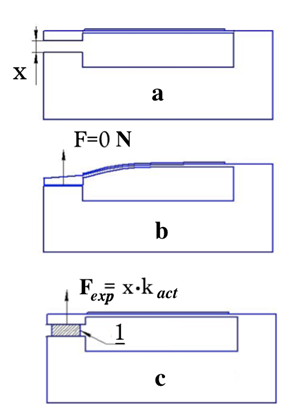
Предположим, что при нагреве и изгибе микроактюатора
сила его воздействия на неподвижную часть пинцета равна нулю (рис. 13). Тогда,
на объект 1 с толщиной ![]() , зажатый между неподвижной
частью пинцета и микроактюатором, действует сила:
, зажатый между неподвижной
частью пинцета и микроактюатором, действует сила:
|
|
(8) |
Полученные данные расчета представлены в таблице 3.
Как видно из таблицы, данные расчета, основанного на экспериментальных данных, лежат в том же порядке величины, что и данные теоретического расчета. Это позволяет сделать вывод, что использованная новая методика исследования микроактюаторов способна верно дать, по крайней мере, оценочное значение их силы и жесткости.
|
|
|
Рис. 13. Простейший расчет силы микроактюатора. а – комнатная температура; b – повышенная температура, сила воздействия нулевая; c – повышенная температура, образец 1 имеет размер х. |
|
Таблица 3. Расчет силы |
|
|||
|
Актюатор |
|
|
|
|
|
1 |
29,2 |
6,9 |
3,13 |
21,7 |
|
2 |
26,6 |
9,0 |
0,85 |
7,7 |
|
3 |
24,2 |
6,3 |
0,97 |
6,1 |
Результаты
1. Разработана методика исследования термоупругих свойств микрообразцов различных материалов на основе СЗМ.
2. Спроектирована экспериментальная установка по определению упругих свойств композитных микроактюаторов на СЗМ «ФемтоСкан» в температурном диапазоне 20…100°С.
3. Методом селективного ионного травления изготовлены образцы композитных микроактюаторов на основе Ti2NiCu+Pt с толщиной слоя с ЭПФ и слоя платины по ~500 нм, длиной – 45…51 мкм и шириной – 1,9…2,5 мкм.
4. Исследована температурная зависимость упругих свойств композитных микроактюаторов в интервале температур 22…91°С. Обнаружен монотонный закон изменения коэффициента жесткости k [Н/м] в зависимости от температуры и показано, что k изменяется:
· от 6,35 до 3,13 Н/м при изменении T от 22 до 91°С для микроактюатора №1;
· от 1,39 до 0,85 Н/м при нагреве с 26 до 91°С; от 0,89 до 0,76 Н/м при охлаждении с 69 до 26°С для микроактюатора №2;
· от 1,72 до 0,97 Н/м при нагреве с 25 до 86°С; от 0,75 до 1,35 Н/м при охлаждении с 69 до 22°С; от 1,07 до 1,04 Н/м при повторном нагреве с 51 до 75°С для микроактюатора №3. Проанализированы различные возможные причины снижения жесткости при нагреве.
5. Проведен расчет силы производимой микроактюатором. Сравнение теории и эксперимента показало, что полученные значения жесткости в пределах погрешности эксперимента совпадают с рассчитанными в предположении, что свойства исходных материалов при субмикронной толщине сохраняются.
6. На основании полученных данных рассчитана сила воздействия микропинцета на манипулируемые микро- и нанообъекты. Для образцов микроактюаторов она составила от 21,7 до 6,1 мкН.
Исследование выполнено в Институте радиотехники и электроники им. В.А. Котельникова РАН за счет гранта Российского научного фонда (проект №14-19-01644).
Литература
1. Irzhak A., Koledov V., Zakharov D., Lebedev G., Mashirov A., Afonina V., Akatyeva K., Kalashnikov V., Sitnikov N., Tabachkova N., Shelyakov A., Shavrov V. Development of laminated nanocomposites on the bases of magnetic and non-magnetic shape memory alloys: Towards new tools for nanotechnology. Journal of Alloys and Compounds, 586 (SUPPL. 1), pp. S464-S468 (2014).
2. Zakharov D., Lebedev G., Irzhak A., Afonina V., Mashirov A., Kalashnikov V., Koledov V., Shelyakov A., Podgorny D., Tabachkova N., Shavrov V. Submicron-sized actuators based on enhanced shape memory composite material fabricated by FIB-CVD. Smart Materials and Structures, 21 (5), art. no. 052001 (2012).
3. Shelyakov A.V., Sitnikov N.N., Koledov V.V., Kuchin D.S., Irzhak A.I., Tabachkova N.Yu. Melt-spun thin ribbons of shape memory TiNiCu alloy for micromechanical applications. International Journal of Smart and Nano Materials, 2 (2), pp. 68-77 (2011).
4. Shelyakov A.V., Sitnikov N.N., Menushenkov A.P., Koledov V.V., Irjak A.I. Nanostructured thin ribbons of a shape memory TiNiCu alloy. Thin Solid Films, 519 (15), pp. 5314-5317 (2011).
5. Zakharov D., Lebedev G., Koledov V., Lega P., Kuchin D., Irzhak A., Afonina V., Perov E., Shelyakov A., Pushin V., Shavrov V. An enhanced composite scheme of shape memory actuator for smart systems. Physics Procedia, 10, pp. 58-64 (2010).
6. Irzhak A.V., Zakharov D.I., Kalashnikov V.S., Koledov V.V., Kuchin D.S., Lebedev G.A., Lega P.V., Perov E.P., Pikhtin N.A., Pushin V.G., Tarasov I.S., Khovailo V.V., Shavrov V.G., Shelyakov A.V. Actuators based on composite material with shape-memory effect. Journal of Communications Technology and Electronics, 55 (7), pp. 818-830 (2010).
7. Irzhak A.V., Kalashnikov V.S., Koledov V.V., Kuchin D.S., Lebedev G.A., Lega P.V., Pikhtin N.A., Tarasov I.S., Shavrov V.G., Shelyakov A.V. Giant reversible deformations in a shape-memory composite material. Technical Physics Letters, 36 (4), pp. 329-332 (2010).
8. Ashley D. Slattery, Adam J. Blanch, Jamie S. Quinton and Christopher T. Gibson Calibration of atomic force microscope cantilevers using standard and inverted static methods assisted by FIB-milled spatial markers. Nanotechnology 24, 13pp (2013).
9. Gates R. S. and Reitsma M. G. Precise atomic force microscope cantilever spring constant calibration using a reference cantilever array. Rev. Sci. Instrum. (2007).
10. ФемтоСкан. Многофункциональный сканирующий зондовый микроскоп с полным управлением через Интернет [Электронный ресурс] // Центр перспективных технологий [Офиц. сайт]. URL: http://www.nanoscopy.ru/equipment/femtoscan/ (дата обращения: 14.12.2014).
11. Пономарев С.Д. Расчет упругих элементов машин и приборов./ Пономарев С.Д., Андреева. Л. Е. - М.: Машиностроение, 1962. - 326с.