УДК 623.681.93
Улучшение системных показателей бортовой РЛС за счет траекторного управления наблюдением
В. И. Меркулов
ОАО «Концерн радиостроения «Вега»
Получена 14 января 2012 г.
Аннотация. Рассмотрена возможность использования траекторного управления наблюдением (ТУН) для одновременного улучшения эффективности функционирования, живучести и информативности бортовых РЛС (БРЛС). Приведены примеры использования ТУН в различных режимах работы БРЛС.
Ключевые слова: траекторное управление наблюдением; боевая эффективность, живучесть, информативность; системные показатели БРЛС; тактические показатели РЛС; статистическая теория оптимального управления; первичная, вторичная обработка сигналов.
Abstract. The ability of trajectory control observations (TCO) application for simultaneous operating benefits, robustness and informativity improvement of on-board radar is considered. Examples of TCO application in various operating mode of on-board radar are represented.
Keywords: trajectory control observations; operational benefits, robustness, informativity, on-board radar system parameter, radar tactical parameter, statistical theory of optimal control, primary signal processing, secondary signal processing.
К настоящему времени бортовые БРЛС по показателям боевой эффективности [1], живучести [2] и информативности [3] подошли к пределу своих возможностей. При этом дальнейшее, даже весьма незначительное улучшение любого из этих системных показателей БРЛС связано с неоправданно большими затратами финансовых и материальных ресурсов и, как правило, приводит к ухудшению других системных показателей.
Одним из немногих направлений, дающих возможность одновременного улучшения всех трех системных показателей, является использование так называемого траекторного управления наблюдением. Суть этого способа состоит в выборе такой траектории полета носителя РЛС, при которой, наряду с решением основной тактической задачи, обеспечиваются наилучшие условия для радиолокационного наблюдения.
В частности, использование алгоритма траекторного управления дает возможность обеспечить поражение малоразмерных целей при использовании режимов активного и полуактивного синтезирования апертуры антенны, выполнить разрешение воздушных целей в плотной группе с определением количественного состава, ликвидировать влияние антипода при сопровождении низколетящих целей, повысить достоверность при обнаружении интенсивно маневрирующих целей и обеспечить срыв сопровождения РЛС противоборствующей стороны.
В математическом плане задача управления наблюдением формулируется следующим образом:
Для системы (процесса)
при наличии наблюдений
где
необходимо найти вектор
сигналов
управления, оптимальных по экстремуму целевой функции ![]() ,
которая кроме требований к состоянию (1) учитывает и требования к наблюдениям
(2). Здесь:
,
которая кроме требований к состоянию (1) учитывает и требования к наблюдениям
(2). Здесь: ![]() и
и ![]() — векторы состояния и
наблюдений;
— векторы состояния и
наблюдений; ![]() и
и ![]() — векторы
центрированных гауссовских шумов состояния и измерений; M — знак математического
ожидания;
— векторы
центрированных гауссовских шумов состояния и измерений; M — знак математического
ожидания;![]()
![]() — вектор переменных влияния состояния на наблюдения.
— вектор переменных влияния состояния на наблюдения.
В приложение к радиолокационным наблюдениям соотношение (3) учитывает влияние состояния на параметры отраженных сигналов, т.е. в общем случае, является нелинейным, что значительно затрудняет вычисление управления (4).
Более простой разновидностью управления наблюдением является так называемое траекторное управление наблюдением, в рамках которого влияние состояния на наблюдение осуществляется за счет целенаправленного изменения пространственного положения РЛС относительно лоцируемого объекта. Следует отметить, что при траекторном управлении наблюдением переменные влияния (3), как правило, можно включать в состав вектора состояния. Такой подход дает возможность получить целый ряд преимуществ.
Во-первых, исходя из смысла решаемых информационных задач, достаточно просто предъявить требования к составу и функциональным связям требуемой части состояния (1).
Во-вторых,
можно представить целевую функцию ![]() в виде квадратичного
функционала качества, в котором вектор влияния учитывается в виде вектора
требуемых значений состояния.
в виде квадратичного
функционала качества, в котором вектор влияния учитывается в виде вектора
требуемых значений состояния.
По совокупности это дает возможность значительно сократить объем вычислений при отыскании управления (4) и использовать для этого хорошо отработанные алгоритмы статистической теории оптимального управления (СТОУ) [4, 5].
Принимая во внимание высокую степень неопределенности помехово-целевой обстановки, РЛС должны по возможности обеспечивать максимально высокую точность оценивания фазовых координат в каждый текущий момент времени. В связи с этим целесообразно использовать нетерминальные варианты алгоритмов СТОУ, обеспечивающие экстремум целевой функции в каждый текущий момент времени. В простейшем варианте такие алгоритмы позволяют для системы [5]
предназначенной для отработки процесса
при наличии наблюдений (2) сформировать сигнал управления
оптимальный по минимуму локального функционала качества

В
соотношениях (5)-(8): xT и xy — n-мерные векторы
требуемых и управляемых координат; FT и Fy — динамические матрицы
состояния процессов (5) и (6); ξT и ξy — векторы центрированных
гауссовских шумов состояния с известными матрицами спектральных плотностей; By — матрица эффективности r-мерного (r≤n) вектора u сигналов управления;![]()
![]() и
и ![]() — векторы оптимальных оценок процессов (5)
и (6); Q и K — матрицы штрафов за
точность и величину сигналов управления.
— векторы оптимальных оценок процессов (5)
и (6); Q и K — матрицы штрафов за
точность и величину сигналов управления.
Использование алгоритма (2), (5) – (8) в бортовых РЛС дает возможность совместить требования к решению задач высокоточного наведения носителя на воздушные и наземные объекты с задачей обеспечения такого требуемого пространственного положения относительно цели, при котором реализуется наивысшая точность радиолокационных наблюдений. Последнее реализуется за счет двух факторов:
· извлечения дополнительной информации из пространственной структуры электромагнитного поля;
· усиления или ослабления эффектов вторичной модуляции, возникающей в процессе отражения радиоволн от лоцируемых объектов и их распространения от цели к приемнику РЛС.
В общем случае целенаправленное изменение взаимного пространственного положения РЛС и лоцируемого объекта, вызываемые алгоритмами траекторного управления, оказывают влияние как на алгоритмы первичной, так и вторичной обработки сигналов. При этом под первичной обработкой понимают комплекс алгоритмов поиска, обнаружения и распознавания целей и формирования первичных измерений дальности, скорости сближения и угловых координат. Под вторичной — алгоритмы формирования оценок всех фазовых координат, используемых для управления носителем и выдачи команд целеуказания средствам поражения. Необходимо подчеркнуть, что влияние траекторного управления наблюдением на различные алгоритмы первичной и вторичной обработки настолько многообразно, что рассмотреть все эти аспекты в рамках одной статьи невозможно. Ниже на качественном уровне рассмотрим наиболее простые проявления влияния траекторного управления наблюдением на тактические показатели РЛС в процессе выполнения алгоритмов первичной и вторичной обработки сигналов.
Увеличение дальности действия является одним из наиболее важных требований, предъявляемых к РЛС. Следует отметить, что практически единственным направлением увеличения дальности действия в настоящее время является увеличение времени когерентного накопления отраженных сигналов. Однако, при длительном когерентном накоплении любой маневр цели или носителя БРЛС, приводит к появлению дополнительной частотной модуляции принимаемых сигналов и расширению их спектра, определяемому величиной относительного ускорения. Если не учитывать этого ускорения в алгоритмах согласованной фильтрации, то это приводит к уменьшению дальности обнаружения, ухудшению разрешающей способности по дальности и скорости с соответствующим ухудшением точности оценивания этих координат.
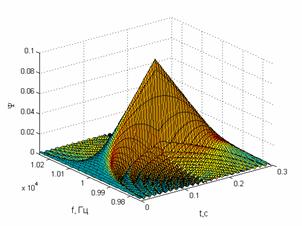
Если же в алгоритмах первичной обработки учитывать ускорение, полученное в результате специально выполненного маневра, то можно улучшить показатели достоверности, определяемые значениями вероятности правильного обнаружения и ложной тревоги, разрешения по дальности, скорости и увеличить дальность обнаружения. Эта особенность иллюстрируется рис. 1 и рис. 2, на которых приведены тело функции
а) б)
|
в) |
 |
| г) |
Рис. 1. Тело функции неопределенности и его сечения при согласованной обработке сигналов, отраженных от неманеврирующей цели.
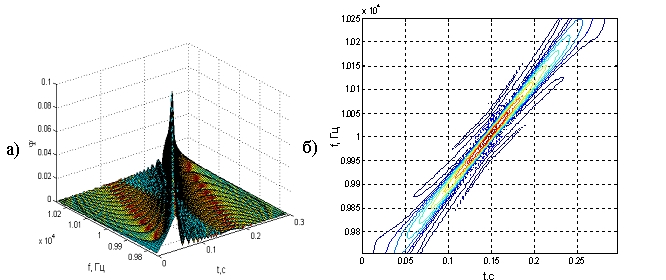
неопределенности (рис. 1,а, 2,а) и его сечения в горизонтальной плоскости (рис. 1,б, 2,б) и в плоскостях частоты (рис. 1,в, 2,в) и временной задержки (рис. 1,г, 2,г) при согласованной фильтрации одиночного радиоимпульса длительностью 100 мс, отраженного от неманеврирующей цели (рис. 1,а,б,в,г) и согласованной фильтрации при учете небольшого целенаправленного маневра цели с продольным ускорением 10 м/с2.
| в) |  |
| г) |
Рис. 2. Тело функции неопределенности и его сечения при
согласованной обработке сигналов, отраженных от маневрирующей цели.
Из рисунков видно, что учет ускорения в алгоритмах первичной обработки позволяет как минимум существенно улучшить разрешающую способность по дальности, причем с увеличением учитываемого ускорения улучшаются показатели достоверности, дальности обнаружения и разрешения.
Целенаправленное изменение динамики взаимного расположения носителя РЛС и цели в существенной мере влияет и на эффективность алгоритмов вторичной обработки сигналов.
С одной стороны, динамика траекторного управления пространственным положением носителя накладывает естественные ограничения на точность функционирования алгоритмов оценивания. С другой стороны динамика изменения пространственного положения может существенно улучшить точность и разрешающую способность РЛС по угловым координатам.
Рассмотрим более подробно ограничительные свойства траекторного управления. Пусть динамика алгоритмов фильтрации определяется моделью (5), а динамика изменения траектории носителя — моделью (6), при условии, что сигнал управления траекторией формируется по закону (7), минимизирующему функционал (8).
Тогда динамические ошибки оценивания определяемые несоответствием миделей (6) и (5) могут быть найдены в процессе решения неоднородного дифференциального уравнения

в котором
Решение (9) будет складываться из общего решения
однородной
части ![]() и частного решения неоднородного уравнения.
и частного решения неоднородного уравнения.
Если динамика траектории носителя соответствует динамическим свойствам измерителей Fy = FT, то ошибки (11) будут убывать от своих первоначальных ошибок захвата (завязки траекторий) до нуля со скоростью определяемой значениями By, K и Q. Если Fy ≠ FT, то появляется вынужденная составляющая ∆x ,величина которой определяется как порядком фильтра оценивания (размерностью вектора xT), так и несоответствием Fy и FT.
Отсюда следует, что если в законе изменения траектории содержатся производные дальности, скорости и бортовых пеленгов, порядок которых превышает размерность (астатизм) фильтров, формирующих оценки этих координат, то неизбежно появляются нарастающие во времени динамические ошибки сопровождения, приводящие в конечном счете к его срыву.
Эта особенность, играющая очень важную роль при многоцелевом сопровождении с малоразмерными моделями состояния, накладывает серьезные ограничения на боевое применение носителей, особенно выполненных на базе сверхманевренных и боевых беспилотных летательных аппаратов.
Известно, что ошибки наведения самолетов и ракет на воздушные и наземные цели определяются в основном ошибками угломерных каналов бортовых радиолокационных систем и головок самонаведения [6]. В связи с этим, весьма актуальным является проблема повышения точности оценивания бортовых пеленгов и угловых скоростей линии визирования. Весьма перспективным направление решения этой задачи является использование траекторного управления наблюдением. В приложении к практике оценивания угловых координат, оно основано на переходе от разрешения по углу, определяемого шириной диаграммы направленности, к доплеровскому обострению луча (ДОЛ) в процессе полета по специально рассчитанной траектории.
Суть такого способа, обеспечивающего улучшение разрешающей способности по углам и точность их оценивания иллюстрируется рис .3. Необходимо подчеркнуть, что законы управления, реализующие такие маневры, достаточно просты и не накладывают принципиальных ограничений на возможность их реализации.
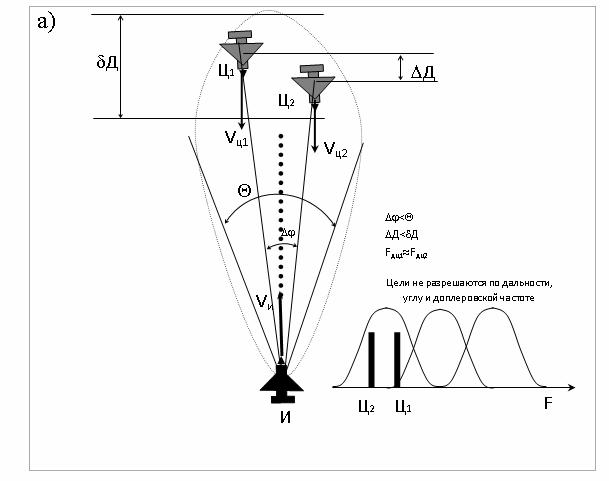
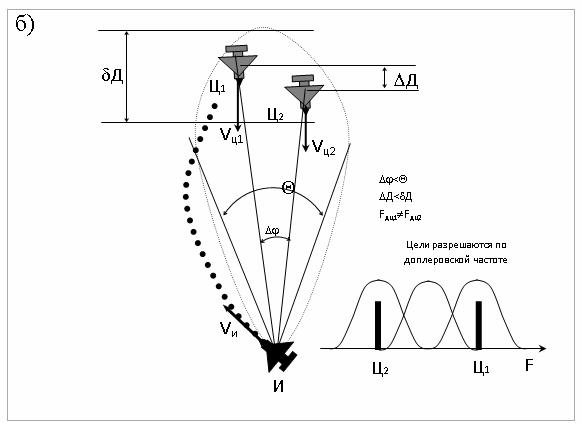
Рис. 3. Пример разрешения целей в плотной группе за счет управления траекторией полета.
Использование активного (однопозиционного) синтезирования, обеспечивающего высокодетальное картографирование земной поверхности для поражения малоразмерных наземных целей, весьма проблематично. Это объясняется тем, что для реализации режима синтезирования необходимо, чтобы носитель двигался под достаточно большим углом к цели, в то время как для ее поражения линия пути должна пройти через цель. Это противоречие может быть устранено за счет использования специфической криволинейной траектории полета, для реализации которой используется алгоритм траекторного управления в горизонтальной плоскости:
Здесь:
требуемый угол
визирования цели; ![]() и
и ![]() —
оценки дальности и скорости сближения с целью;
—
оценки дальности и скорости сближения с целью; ![]() и
и ![]() — оценки текущего бортового пеленга цели
и угловой скорости линии визирования;
— оценки текущего бортового пеленга цели
и угловой скорости линии визирования; ![]() и
и ![]() — оценки собственной скорости носителя и
его поперечного ускорения;
— оценки собственной скорости носителя и
его поперечного ускорения; ![]() и
и ![]() — длина волны зондирующего сигнала и
полоса пропуская доплеровского фильтра РЛС;
— длина волны зондирующего сигнала и
полоса пропуская доплеровского фильтра РЛС; ![]() —
требуемое линейное разрешение по азимуту;
—
требуемое линейное разрешение по азимуту; ![]() ,
, ![]() и
и ![]() —
коэффициенты штрафов за точность управления по углу, угловой скорости и за
величину управляющего ускорения.
—
коэффициенты штрафов за точность управления по углу, угловой скорости и за
величину управляющего ускорения.
Реализуемые
при использовании (12) и (13) траектории, показатели разрешения ![]() , промаха h и текущего поперечного
ускорения
, промаха h и текущего поперечного
ускорения ![]() в относительных координатах показаны на рис. 4,а,б,в,г.
в относительных координатах показаны на рис. 4,а,б,в,г.
Недостатком рассмотренного способа является низкая скрытность наведения, а соответственно, и живучесть, обусловленная необходимостью работы РЛС на излучение.
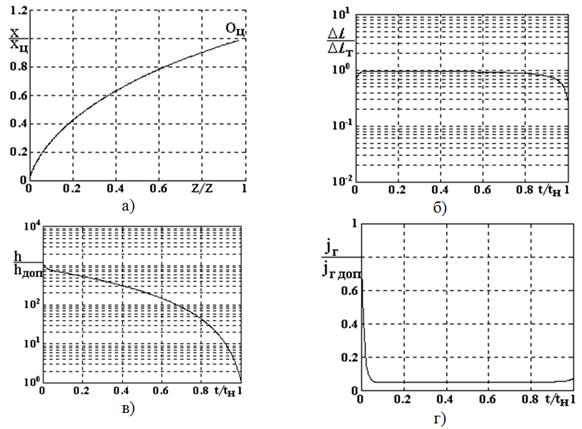
Рис. 4. Параметры
относительного движения в однопозиционной РЛС
с активным синтезированием.
Существенно более высокими показателями живучести обладают двухпозиционные системы с использованием полуактивного синтезирование. При таком способе одна позиция (ударная) наводится на цель в режиме приема сигнала, отраженного от цели, облучаемой РЛС, размещенной на второй (информационной) позиции. При этом траектория информационной позиции обеспечивает на ударной позиции синтезирование апертуры антенны с постоянным линейным разрешением по азимуту при любом существующем законе ее наведения, однако в общем случае для реализации наведения с полуактивным синтезированием необходимо передавать с ударной позиции на информационную оценку угловой скорости линии визирования.
Пример реализации такого подхода при условии, что ударная позиция наводится по методу пропорционального наведения
а информационная позиция — по закону
приведена на
рис. 5. Здесь: ![]() и
и ![]() —
требуемые поперечные ускорения информационной и ударной позиций;
—
требуемые поперечные ускорения информационной и ударной позиций; ![]() и
и ![]() — оценки
их угловых скоростей линий визирования;
— оценки
их угловых скоростей линий визирования; ![]() —
оценка скорости сближения ударной позиции с целью;
—
оценка скорости сближения ударной позиции с целью; ![]() —
навигационная постоянная;
—
навигационная постоянная; ![]() — оценка дальности до цели
от информационной позиции;
— оценка дальности до цели
от информационной позиции; ![]() — длина волны сигнала
подсвета цели;
— длина волны сигнала
подсвета цели; ![]() — полоса пропускания
доплеровского фильтра ударной позиции;
— полоса пропускания
доплеровского фильтра ударной позиции; ![]() и
и ![]() — коэффициенты штрафов за точность
выдерживания траектории информационной позиции и величину управляющего
ускорения
— коэффициенты штрафов за точность
выдерживания траектории информационной позиции и величину управляющего
ускорения ![]() .
.
На рис. 5 кривыми 1 показаны параметры относительного движения информационной позиции, а кривыми 2 — ударной.
|
а)
в) |
б)
г) |
|
д) |
е) |
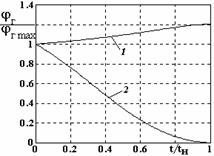
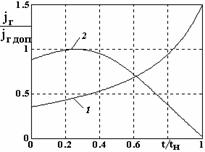
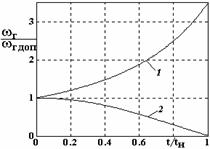
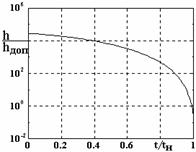
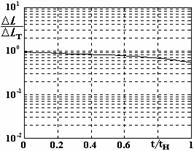
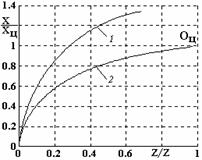
Рис. 5. Параметры
относительного движения в двухпозиционной РЛС
с полуактивным синтезированием.
Аналогичным образом за счет маневра в вертикальной плоскости можно обеспечить селекцию низколетящей цели при наличии антипода.
Живучесть бортовых РЛС может быть улучшена за счет целенаправленного изменения спектра отраженных сигналов противоборствующих РЛС и маневров, приводящих к срыву сопровождения ими наших ЛА, а также скрытного наведения в зонах доплеровской режекции [7].
Информативность бортовых РЛС может быть повышена за счет получения дополнительной информации, извлекаемой из пространственной структуры электромагнитного поля и целенаправленного изменения ширины спектра отраженных целей [3].
Еще бóльший выигрыш по всем показателям эффективности, живучести и информативности можно обеспечивать при использовании траекторного управления в многопозиционных системах воздушного базирования [8].
Кардинальным решением вопроса повышения помехозащищенности является переход к пассивным и полуактивным режимам работы РЛС для которых точность оценивания местонахождения целей напрямую зависит от геометрии взаимного расположения лоцируемого объекта, передающей и приемной позиций. Преимуществом полуактивных режимов является возможность улучшения эффектов вторичной модуляции с соответствующим увеличением точности, разрешающей способности и скрытности наведения приемной позиции за счет соответствующего маневрирования удаленной передающей позиции. Преимуществом пассивных режимов является высокая скрытность, а соответственно и живучесть РЛС.
В заключение необходимо отметить, что траекторное управление наблюдением, обеспечивая улучшение большинства тактических показателей РЛС, позволяет реализовать высокоточные режимы наведения, недоступные для обычных РЛС и расширить область применения носителей при индивидуальном наведении на цель в составе плотной группы и ликвидации антипода при перехвате низколетящих целей. Особенно большие преимущества дает траекторное управление при функционировании РЛС в составе многопозиционных систем наведения.
Работа выполнена при поддержке РФФИ, проект №10-08-00649-а.
Литература
1. Ярлыков М.С., Богачев А.С., Миронов М.А. Боевое применение и эффективность авиационных комплексов. / Под ред. М.С. Ярлыкова. — М.: ВВИА им. проф. Н.Е. Жуковского, 1990.
2. Верба В.С., Гандурин В.А., Меркулов В.И. Живучесть авиционных комплексов авиационного дозора и наведения. // Информационно-измерительные и управляющие системы, №3, т.6, 2008.
3. Концептуальный подход к управлению информативностью радиолокационных систем. // Успехи современной радиоэлектроники, №10, 2011.
4. Ройтенберг Я.Н. Автоматическое управление. — М.: Наука, 1992.
5. Меркулов В.И., Дрогалин В.В., Канащенков А.И. и др. Авиационные системы радиоуправления. Т.1. Принципы построения систем радиоуправления. Основы синтеза и анализа. / Под ред. А.И. Канащенкова и В.И. Меркулова. — М.: Радиотехника, 2003.
6. Меркулов В.И., Дрогалин В.В., Канащенков А.И. и др. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения. / Под ред. А.И. Канащенкова и В.И. Меркулова. — М.: Радиотехника, 2003.
7. Меркулов В.И., Забелин И.В. Траекторное управление наблюдением как способ создания преднамеренных алгоритмических воздействий на радиолокационные системы. // Радиотехника, №7, 2010.
8. Меркулов В.И., Чернов В.С., Юрчик И.А. Авиационные многопозиционные системы радиоуправления. // Успехи современной радиоэлектроники, №12, 2006.