УДК621.398
Обоснование требований к вычислительному устройству цифрового автокорреляционного приемника сигналов РСА
В. П. Лихачев, И. Ф. Купряшкин, В. В. Семенов, И. М. Сотников
Военный учебно-научный центр Военно-воздушных сил «Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина» (г. Воронеж)
Статья получена 19 января 2014 г.
Аннотация. В статье приведены два варианта функциональной схемы цифрового автокорреляционного приемника (ЦАКП) обработки сигналов РСА и требования к его функциональным устройствам с учетом взаимного перемещения космического аппарата с РСА и летательного аппарата - носителя аппаратуры радиотехнического мониторинга (РТМ). Исследовано влияние движения носителя РСА и летательного аппарата-носителя аппаратуры РТМ на обработку ЛЧМ-сигнала в ЦАКП.
Ключевые слова: автокорреляционный приемник, радиолокационная система с синтезированной апертурой антенны, радиотехнический мониторинг, аналого-цифровой преобразователь, программируемая логическая интегральная схема.
Abstract. The article presents two variants of the functional diagram of the digital autocorrelation receiver (DACR) SAR signal processing and requirements for its functional devices considering relative displacement of the spacecraft engaged with SAR and aerial vehicle with radiotechnical monitoring equipment. The influence of relative displacement of the spacecraft engaged with SAR and aerial vehicle with radiotechnical monitoring equipment at LFM signal processing in DACR is investigated.
Keywords: autocorrelation receiver, synthetic aperture radar, radiotechnical monitoring, analog-to-digital converter, programmable logic integrated circuit.
Радиолокационные системы с синтезированной апертурой антенны (РСА) на современном этапе близки по своим характеристикам к системам оптического диапазона. В то же время РСА присущи принципиальные преимущества [1,2]: большие дальности формирования радиолокационных изображений (РЛИ) объектов, расположенных на земной поверхности независимо от времени суток, уровня освещенности, наличия облачности, являющейся главной помехой для оптической съемки [3,4]. В связи с этим в мирное время возникает необходимость РТМ РСА космического базирования в интересах подготовки к различным мероприятиям, например, к радиоэлектронной борьбе [5,6].
Использование в движущихся с большой скоростью РСА
сложных сигналов, например, с линейной частотной модуляцией, требует применения
специальных алгоритмов их приема и обработки в средствах РТМ. В условиях
априорной неопределенности параметров ЛЧМ-сигналов одним из способов их обработки
является автокорреляционный способ [7]. Схема аналогового автокорреляционного
приемника (АКП), в состав которого входят: полосовой фильтр высоких частот (ПФ
ВЧ) с полосой пропускания ![]() , линия задержки (ЛЗ), умножитель и
полосовые фильтры низких частот (ПФ НЧ) с полосой пропускания
, линия задержки (ЛЗ), умножитель и
полосовые фильтры низких частот (ПФ НЧ) с полосой пропускания ![]() , показана на рисунке 1. В типовых
условиях приемные устройства РТМ расположены на неподвижных объектах. В случае
размещения аппаратуры РТМ на малых летательных аппаратах возникают серьезные
ограничения на масса-габаритные характеристики, которые не позволяют
реализовать аналоговый вариант схемы. Это приводит к необходимости
миниатюризации АКП, реализации цифровой обработки сигналов и учета взаимного
перемещения космического аппарата (КА) с РСА и летательного аппарата - носителя
аппаратуры РТМ в интересах имитации неподвижных (медленно движущихся) наземных
целей.
, показана на рисунке 1. В типовых
условиях приемные устройства РТМ расположены на неподвижных объектах. В случае
размещения аппаратуры РТМ на малых летательных аппаратах возникают серьезные
ограничения на масса-габаритные характеристики, которые не позволяют
реализовать аналоговый вариант схемы. Это приводит к необходимости
миниатюризации АКП, реализации цифровой обработки сигналов и учета взаимного
перемещения космического аппарата (КА) с РСА и летательного аппарата - носителя
аппаратуры РТМ в интересах имитации неподвижных (медленно движущихся) наземных
целей.
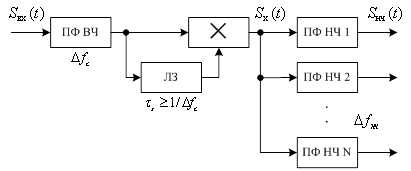
Рис. 1. Схема аналогового автокорреляционного приемника
В связи с этим целью статьи является анализ необходимости учета учетом взаимного перемещения КА с РСА и летательного аппарата - носителя аппаратуры РТМ при обосновании варианта функциональной схемы ЦАКП сигналов РСА.
В интересах определения ограничений и допущений при обосновании схемы ЦАКП примем технические характеристики РСА X, L, C-диапазонов:
- несущая частота зондирующего импульса ![]() – 9.5 ГГц, 36 ГГц;
– 9.5 ГГц, 36 ГГц;
- вид сигнала – импульсный ЛЧМ;
- длительность импульса ![]() – 20, 100
мкс.
– 20, 100
мкс.
Положим, что скорость носителя РСА ![]() =7500 м/с, а максимальная скорость
носителя аппаратуры РТМ
=7500 м/с, а максимальная скорость
носителя аппаратуры РТМ ![]() =300 м/с. Будем
полагать, что коэффициент передачи АКП (рисунок 1) равен единице, а его фильтр
без искажения пропускает низкочастотные составляющие спектра сигнала на выходе
умножителя (рисунок 1).
=300 м/с. Будем
полагать, что коэффициент передачи АКП (рисунок 1) равен единице, а его фильтр
без искажения пропускает низкочастотные составляющие спектра сигнала на выходе
умножителя (рисунок 1).
Время линии задержки должно удовлетворять соотношению:
![]() (1)
(1)
Наибольшее распространение получили линии задержки с временной задержкой от 10 нс до 1000 нс, что удовлетворяет условию (1) [8].
Рассмотрим два варианта реализации ЦАКП. В первом варианте аналого-цифровой преобразователь (АЦП) и программируемая логическая интегральная схема (ПЛИС) установлены после ПФ ВЧ (рисунок 2а).
Прямая оцифровка на несущей частоте входного сигнала (9,5 или 36 ГГц) сопряжена с необходимостью обработки большого объема информации и финансовыми затратами, поэтому целесообразнее изначально понизить частоту с использованием гетеродинного приемника.
При первом подходе наиболее жесткие требования
предъявляются к АЦП – полоса разведки сигнала составляет 1 ГГц, следовательно,
по теореме Котельникова частота дискретизации АЦП ![]() ≥2ГГц.
Среди подходящих образцов стоит отметить АЦП ADC12D1600 производства
TexasIntruments, позволяющий производить оцифровку с частотой 3.2 ГГц [9].
≥2ГГц.
Среди подходящих образцов стоит отметить АЦП ADC12D1600 производства
TexasIntruments, позволяющий производить оцифровку с частотой 3.2 ГГц [9].
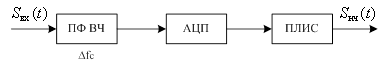
а) оцифровка на fc
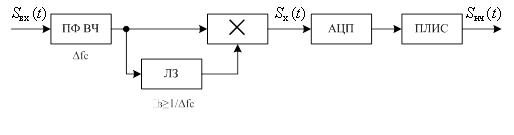
б) оцифровка на fр
Рис. 2. Варианты функциональных схем цифрового автокорреляционного приемника
Оцифрованные данные после АЦП передаются в ПЛИС на регистр сдвига, который осуществляет временную задержку. Например, для выполнения задержки в 100 нс, длина регистра сдвига должна составлять 320 элементов, а количество регистров сдвига должно соответствовать разрядности АЦП.
В умножителе, реализованном в ПЛИС, прямой и задержанный сигналы перемножаются, и происходит сжатие спектра анализируемого сигнала, после чего результат перемножения поступает на вход блока осуществляющего быстрое преобразование Фурье.
Реализация быстрого преобразования Фурье размером в 1024 16-разрядных значений на ПЛИС требует 60 тысяч вентилей. Для обеспечения обработки данных, поступающих с частотой 3.2 ГГц ПЛИС должна производить вычисление преобразования Фурье с частотой не менее 4 МГц. Указанные требования выполняются для большинства современных ПЛИС, в том числе принадлежащих группе моделей начального уровня.
Во втором варианте ЦАКП АЦП установлен после
аналогового умножителя сигналов (рисунок 2б). В данной схеме свертка сигнала
осуществляется в аналоговом виде, после чего происходит его оцифровка на
разностной частоте ![]() и дальнейшая обработка в ПЛИС.
и дальнейшая обработка в ПЛИС.
Для случая неподвижных излучателя и приемника разностная
частота ![]() определяется
как:
определяется
как:
 . (2)
. (2)
При использовании ![]() =100
нс,
=100
нс, ![]() =5 МГц (для случая
=5 МГц (для случая ![]() =1
ГГц,
=1
ГГц, ![]() =20 мкс). Для оцифровки такого сигнала
может быть применен сравнительно простой низкочастотный АЦП с частотой не менее
12 МГц (например, АЦП серии AD9237 компании AnalogDevices) [10].
=20 мкс). Для оцифровки такого сигнала
может быть применен сравнительно простой низкочастотный АЦП с частотой не менее
12 МГц (например, АЦП серии AD9237 компании AnalogDevices) [10].
Требования к вычислительному устройству для данной схемы (рисунок 2б) гораздо ниже, чем для полностью цифровой реализации (рисунок 2а). Для реализации преобразования Фурье требуется 40 тысяч вентилей, а для обработки поступающих данных необходима минимальная частота 100 кГц.
Далее исследуем влияние движения носителя РСА и летательного аппарата-носителя аппаратуры РТМ на обработку ЛЧМ-сигнала в ЦАКП. Аналитическое выражение для n-го входного ЛЧМ сигнала с учетом движения носителя РСА и носителя аппаратуры РТМ в общем виде запишем так:
 (3)
(3)
где ![]() ,
, ![]() - радиальная скорость носителя РСА в момент приема n-го
зондирующего сигнала,
- радиальная скорость носителя РСА в момент приема n-го
зондирующего сигнала, ![]() -
радиальная скорость носителя аппаратуры РТМв момент приема n-го
зондирующего сигнала,
-
радиальная скорость носителя аппаратуры РТМв момент приема n-го
зондирующего сигнала, ![]() - длина волны зондирующего
импульса.
- длина волны зондирующего
импульса.

![]() ;
(5)
;
(5)
где n=1,2..N
– номер излучаемого импульса, ![]() - период следования
зондирующего импульса.
- период следования
зондирующего импульса.
![]() . (6)
. (6)
где ![]() - расстояние, преодолеваемое n-ым
импульсом.
- расстояние, преодолеваемое n-ым
импульсом.
Используя тригонометрические преобразования опишем сигнал на выходе умножителя АКП в виде:
 (7)
(7)
Сигнал на выходе НЧ-фильтра (на рисунке 2 реализован в ПЛИС) определяется низкочастотной составляющей (7):
 (8)
(8)
Сигнал (8) будет иметь дополнительный набег фазы от
импульса к импульсу при условии, что ![]() и
и ![]() изменяются.
изменяются.
Из выражения (8) с учетом (4 – 6) определим разностную
частоту ![]() и фазу принятого зондирующего импульса
и фазу принятого зондирующего импульса ![]() в случае взаимного встречного или
противоположно направленного движения носителя РСА и носителя аппаратуры РТМ:
в случае взаимного встречного или
противоположно направленного движения носителя РСА и носителя аппаратуры РТМ:

 , (10)
, (10)
где
 . (11)
. (11)
При телескопическом обзоре пространства имеются следующие ограничения на период следования зондирующих импульсов РСА КБ:
где ![]() - разрешающая способность РСА КБ по
азимуту.
- разрешающая способность РСА КБ по
азимуту.
При
малом аргументе ![]() получим следующее выражение:
получим следующее выражение:
 .
(13)
.
(13)
Тогда с учетом выражений (9) и (13) получим:

Полоса пропускания цифрового доплеровского фильтра при
условии  и
и ![]() :
:
а разностная частота:
 . (16)
. (16)
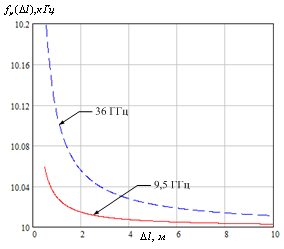
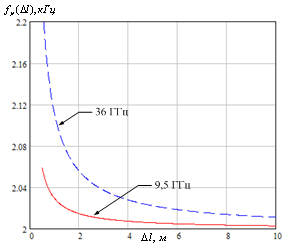
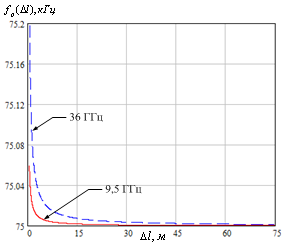
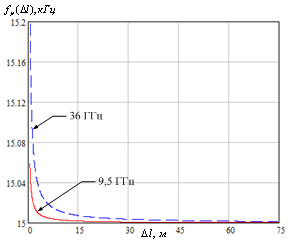
С использованием выражения (14) при условии движения
носителя РСА и носителя аппаратуры РТМ навстречу друг другу (или в
противоположные стороны) рассчитаны зависимости разностной частоты ![]() от разрешающей способности по азимуту
от разрешающей способности по азимуту ![]() для различных диапазонов частот (9,5 ГГц, 36 ГГц) при
для различных диапазонов частот (9,5 ГГц, 36 ГГц) при
![]() =20 мкс (рисунок 3а, 3в) и
=20 мкс (рисунок 3а, 3в) и ![]() =100 мкс (рисунок 3б, 3г), ширине спектра
зондирующего импульса
=100 мкс (рисунок 3б, 3г), ширине спектра
зондирующего импульса ![]() =2
МГц (рисунок 3а, 3б) и
=2
МГц (рисунок 3а, 3б) и ![]() =15 МГц (рисунок 3в, 3г).
=15 МГц (рисунок 3в, 3г).
а) ![]() =20
мкс,
=20
мкс,![]() =2 МГц б)
=2 МГц б) ![]() =100
мкс,
=100
мкс, ![]() =2 МГц
=2 МГц
в) ![]() =20
мкс,
=20
мкс,![]() =15 МГц
г)
=15 МГц
г)![]() =100
мкс,
=100
мкс, ![]() =15 МГц
=15 МГц
Рис. 3. Зависимость разностной частотына выходе
умножителя от
разрешающей способности РСА КБ по азимуту
Из анализа рисунка 3 следует, что при изменении
разрешающей способности по азимуту ![]() от
0,5 м до 10 м (для
от
0,5 м до 10 м (для ![]() =15 МГц до 75 м) разностная частота
=15 МГц до 75 м) разностная частота ![]() изменяется
в пределах 200 Гц. Из выражения (15) следует, что полоса пропускания
доплеровского фильтра
изменяется
в пределах 200 Гц. Из выражения (15) следует, что полоса пропускания
доплеровского фильтра ![]() изменяется от 100 Гц до 750 Гц и, следовательно, изменение разностной частоты
изменяется от 100 Гц до 750 Гц и, следовательно, изменение разностной частоты ![]() в зависимости от разрешающей способности
по азимуту оказывает влияние на точность ее определения только в случае
реализации в РСА режима маршрутной съемки [3,4], т. е. при значениях
в зависимости от разрешающей способности
по азимуту оказывает влияние на точность ее определения только в случае
реализации в РСА режима маршрутной съемки [3,4], т. е. при значениях ![]() меньше чем 4 МГц. Следовательно, в данном
случае необходимо учитывать взаимное перемещение КА с РСА и носителя ЦАКП при
обработке сигналов.
меньше чем 4 МГц. Следовательно, в данном
случае необходимо учитывать взаимное перемещение КА с РСА и носителя ЦАКП при
обработке сигналов.
Если радиальная скорость носителя
аппаратуры РТМ ![]() определяется в инерциальной навигационной системе
(ИНС), то величина радиальной скорости носителя РСА
определяется в инерциальной навигационной системе
(ИНС), то величина радиальной скорости носителя РСА ![]() в
выражении (12) является неизвестной. Предлагается определять радиальную
скорость КА-носителя РСА на основе данных орбитальной модели SGP4, которая
позволяет осуществить предсказание орбитального положения КА и представляет
собой двустрочный набор элементов (ДНЭ). Пример описания содержимого полей ДНЭ
приведен в таблице 1.
в
выражении (12) является неизвестной. Предлагается определять радиальную
скорость КА-носителя РСА на основе данных орбитальной модели SGP4, которая
позволяет осуществить предсказание орбитального положения КА и представляет
собой двустрочный набор элементов (ДНЭ). Пример описания содержимого полей ДНЭ
приведен в таблице 1.
Таблица 1.
|
Поле |
Позиция |
Описание |
|
Строка 2 |
||
|
2.3 |
09-16 |
Наклонение [градусы] |
|
2.4 |
18-25 |
Прямое восхождение восходящего узла [градусы] |
|
2.5 |
27-33 |
Эксцентриситет (десятичная точка опускается) |
|
2.6 |
35-42 |
Аргумент перигея [градусы] |
|
2.7 |
44-51 |
Средняя аномалия [градусы] |
|
2.8 |
53-63 |
Среднее движение [оборотов в день] |
Орбитальная модель SGP4 содержит значения элементов орбиты космического аппарата-носителя РСА, представленные на рисунке 4.
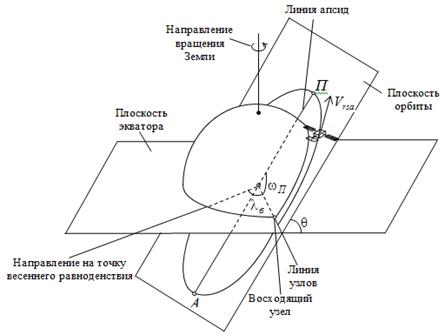
а) Кеплеровские элементы орбиты ![]()
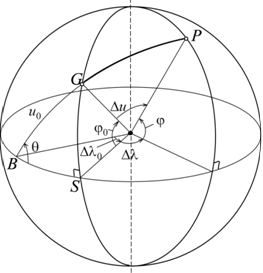
б)
геоцентрические координаты подспутниковой точки: ![]() – наклонение орбиты;
– наклонение орбиты; ![]() –
угловое расстояние перигея;
–
угловое расстояние перигея; ![]() и
и ![]() – долгота и широта подспутниковой точки;
– долгота и широта подспутниковой точки; ![]() – угловое перемещение носителя РСА по орбите.
– угловое перемещение носителя РСА по орбите.
Рис. 4. Элементы орбиты космического аппарата-носителя РСА
Радиальная скорость носителя определяется выражением:
 , (17)
, (17)
где ![]() - радиус вектор
носителя РСА,
- радиус вектор
носителя РСА, ![]() - вектор скорости носителя РСА,
- вектор скорости носителя РСА,
![]() - дистанция между носителем и
ретранслятором.
- дистанция между носителем и
ретранслятором.
 , (18)
, (18)
где ![]() –
гравитационная постоянная,
–
гравитационная постоянная, ![]() –
масса Земли,
–
масса Земли, ![]() – радиус Земли,
– радиус Земли, ![]() – высота полета РСА.
– высота полета РСА.
Учитывая таким образом ![]() следует
вводить поправку при определении
следует
вводить поправку при определении ![]() .
.
Таким образом, рассмотренные варианты реализации ЦАКП
сигналов РСА являются обоснованными и практически реализуемыми с использованием
современной элементной базы. Первый способ реализации с оцифровкой на ![]() является более сложным и дорогостоящим за
счёт использования быстродействующего АЦП и ПЛИС с большим количеством
вентилей. Второй способ реализации с оцифровкой на
является более сложным и дорогостоящим за
счёт использования быстродействующего АЦП и ПЛИС с большим количеством
вентилей. Второй способ реализации с оцифровкой на ![]() является
более предпочтительным с точки зрения меньшей сложности и затрат. Однако в этом
случае требуется дополнительная обработка сигналов РСА, функционирующих в
режиме маршрутной съемки, в ЦАКП.
является
более предпочтительным с точки зрения меньшей сложности и затрат. Однако в этом
случае требуется дополнительная обработка сигналов РСА, функционирующих в
режиме маршрутной съемки, в ЦАКП.
При анализе требований к функциональным устройствам
ЦАКП сигналов РСА с учетом взаимного перемещения КА с РСА и летательного аппарата
-
носителя аппаратуры РТМ получены зависимости значения разностной частоты ![]() от разрешающей способности по азимуту
от разрешающей способности по азимуту ![]() для различных несущих частот (9,5 ГГц, 36 ГГц) и фазы
принятого зондирующего импульса
для различных несущих частот (9,5 ГГц, 36 ГГц) и фазы
принятого зондирующего импульса ![]() от периода его
следования. Выявлено наличие изменений разностной частоты
от периода его
следования. Выявлено наличие изменений разностной частоты ![]() в пределах 200 Гц при условии движения
носителя РСА и носителя аппаратуры РТМ, что оказывает существенное влияние на
точность ее определения, так как полоса пропускания доплеровского фильтра
в пределах 200 Гц при условии движения
носителя РСА и носителя аппаратуры РТМ, что оказывает существенное влияние на
точность ее определения, так как полоса пропускания доплеровского фильтра ![]() изменяется от
100 Гц до 200 Гц при значениях
изменяется от
100 Гц до 200 Гц при значениях ![]() меньше чем 4 МГц. Кроме этого,
когда разрешающая способность по дальности значительно больше разрешающей
способности по азимуту
меньше чем 4 МГц. Кроме этого,
когда разрешающая способность по дальности значительно больше разрешающей
способности по азимуту ![]() возможно
еще большее изменение разностной частоты
возможно
еще большее изменение разностной частоты ![]() в
пределах, превышающих полосу пропускания доплеровского фильтра
в
пределах, превышающих полосу пропускания доплеровского фильтра ![]() , что также приведет к
ошибке определения разностной частоты
, что также приведет к
ошибке определения разностной частоты ![]() .
.
Литература
1. Андронов А., Шевров Р. Системы спутников-ретрансляторов, радиолокационной разведки и дистационной сьемки Земли//Зарубежное военное обозрение.–1995.– №3.
2. Аэрокосмический радиолокационный мониторинг Земли/Под ред. А.И. Канащенкова. – М.: Радиотехника, 2006.– 220 с.
3. Антипов В.Н., Горяинов В.Т., Кулин А.Т. и др. Радиолокационные станции с цифровым синтезированием апертуры антенны/Под ред. В.Т. Горяинова.– М.: Радио и связь, 1988.– 304 с.
4. Верба В.С., Неронский Л.Б., Осипов И.Г., Турук В.Э. Радиолокационные системы землеобзора космического базирования/ Под ред. В.С. Вербы.– М.: Радиотехника, 2010.– 680 с.
5. Купряшкин И. Ф., Лихачев В. П. Маскирование радиолокационных изображений пространственно-протяженных объектов мультипликативными ретранслированными помехами. – М.: Известия высших учебных заведений. Радиоэлектроника, 2004, Т. 47, № 9.
6. Быков В. В., Душкин А. В., Купряшкин И. Ф., Лихачев В. П. Эффективность шумовых изображений при воздействии на корреляционно-экстремальные системы, использующие для картографирования РЛС с синтезированной апертурой – М.: Радиотехника, 2005, № 7.
7. Андронов С.И., Батчев С.А., Коротков В.А., Кульпин В.А., Лукинский В.М., Родионов О.В., Уткин В.В. Военно-технические основы построения средств радиотехнической разведки.– М.: Радиотехника, 2013. – 463 с.
8. Калабеков Б.А. Цифровые устройства и микропроцессорные системы. Изд. 2-е перераб. и доп. – М.: Горячая линия – Телеком, 2002. – 336 с.
9. [Электронный ресурс].URL: http://www.ti.com.
10. [Электронный ресурс].URL: http://www.analog.com.