УДК 629.7.058.53
Проблемы и общесистемные вопросы разработки бортовых РЛС нового поколения
В. С. Верба
АО «Концерн радиостроения «Вега»
Статья получена 23 декабря 2015 г.
Аннотация. Рассмотрены особенности функционирования бортовой РЛС в составе интегрированного авиационного комплекса в рамках бесконтактных сетецентрических войн. Определён перечень теоретических задач, подлежащих первоочередному решению при создании РЛС нового поколения, приведены системные показатели её совершенства. Кроме того, рассмотрены общесистемные подходы к разработке бортовых радиолокационных систем, определяемые их ролью и местом в составе многопозиционных систем наведения и интегрированных авиационных комплексов, и прикладные проблемы, которые необходимо решать при создании перспективных авиационных информационно-управляющих систем, а также технологические проблемы и критические технологии, которые необходимо решать в процессе создания бортовых РЛС нового поколения.
Ключевые слова: бортовая РЛС, интегрированный авиационный комплекс, системные показатели совершенства, многопозиционная система наведения, обзор, обнаружение, сопровождение, распознавание, критические технологии, технологический уклад.
Abstract: Specifics of functioning of on-board radars as a part of integrated airborne systems are studied within the framework of non-contact network-centric warfare. A range of top-priority theoretical challenges of designing new generation radar systems is listed. Efficiency indices of radar systems are given. General design issues of developing on-board radars are studied. The issues are defined by the role and placement of radar systems in multi-static guidance systems and integrated airborne systems. Practical challenges arising during design of future airborne information control systems are discussed. Technological problems and critical technologies that needs for new-generation airborne radar creating are considered.
Key words: on-board radar, integrated airborne systems, efficiency indices, multi-static guidance systems, surveillance, detection, tracking, identification, airborne radar, critical technology, technological mode.
Введение
Содержание статьи условно разделено на три части.
В первой части обращается внимание на особенности и условия, в которых приходится функционировать РЛС в составе бортового интегрированного авиационного комплекса при ведении бесконтактных сетецентрических войн, а также рассматриваются системные показатели совершенства данных систем.
Во второй части рассматриваются общесистемные вопросы разработки БРЛС и подходы к решению проблем прикладного характера.
В третьей части статьи основное внимание сосредоточено на проблемах технологического характера, которые необходимо решать при разработке БРЛС нового поколения.
1. РЛС – составная часть интегрированного авиационного комплекса
Необходимость совершенствования современных бортовых РЛС (БРЛС), являющихся практически единственным всепогодным источником информации, обеспечивающим мониторинг окружающего пространства с управляемой детальностью и входящим в состав бортовых авиационных комплексов, обусловлена, с нашей точки зрения, следующим рядом факторов:
· изменением требований к БРЛС, обусловленных принятием стратегии бесконтактных сетецентрических войн [1];
· появлением новых научных направлений, позволяющих синтезировать более совершенные алгоритмы управления летательными аппаратами и их информационного обеспечения;
· изменением взглядов на роль и место БРЛС в составе комплекса бортового оборудования;
· изменением взглядов на оценку совершенства БРЛС;
· возросшими технологическими возможностями по созданию более совершенной элементной базы и более совершенных бортовых вычислителей.
В связи с этим представляет интерес возможность рассмотрения комплекса теоретических, прикладных и технологических проблем, с которыми приходится сталкиваться в процессе разработки БРЛС нового поколения.
В общем случае БРЛС должна обеспечивать ситуационную осведомлённость экипажа (оператора) при решении всех задач, стоящих перед летательным аппаратом (ЛА) [2]. Для выполнения этой задачи БРЛС должна быть многофункциональной и многорежимной [3].
Многофункциональность подразумевает способность осуществлять зондирование не только воздушно-космического пространства, но и земной (водной) поверхности и подповерхностных объектов. Многорежимность определяется совокупностью режимов, используемых при зондировании этих сред. К ним, прежде всего, относятся: варианты обзора зон ответственности, режимы обнаружения, распознавания, сопровождения одиночных целей и многоцелевое сопровождение с ранжированием целей по степени важности, группирование целей по их тактическому признаку и ряд других [4].
Необходимо, однако, подчеркнуть, что к настоящему времени классическое определение бортовой РЛС уже не соответствует современным реалиям, поскольку фактически она является составной частью интегрированного авиационного комплекса, в состав которого в качестве базовых элементов входят многоспектральная оптико-электронная система (ОЭС), система государственного опознавания (СГО), системы радиотехнической разведки (СРТР) и радиоэлектронной борьбы (РЭБ), бортовой комплекс связи (БКС), навигационный комплекс (НК), бортовая вычислительная система (БВС), автоматизированная система управления (АСУ), система индикации (СИ) и летательный аппарат (ЛА) как объект управления [5].
Принципиально новым является использование ЛА не только в качестве носителя, решающего задачи траекторного управления, но и в качестве составной части, принимающей непосредственное участие в решении информационных задач [6].
Одной из наиболее сложных проблем в современном, а тем более и перспективном ИАК является оптимизация информационно-управляющих потоков. По вариантам управления информационными потоками различают несколько уровней интеграции: внутри самого носителя бортового комплекса, в составе пространственно разнесённых многопозиционных систем наведения (МПСН);в рамках глобальной сетецентрической информационно-управляющей системы (ИУС) [1].
В дальнейшем в целях упрощения изложения для локационной части ИАК в докладе будет сохранена аббревиатура БРЛС.
Необходимо отметить, что функционирование БРЛС в составе ИАК накладывает на неё ряд существенных ограничений, затрудняющих обоснование требований к режимам её работы и показателям совершенства, в частности.
· БРЛС должна рассматриваться как основной, но не единственный источник информации, участвующий в многоэтапной оптимизации коллективного интереса ИАК;
· усложнение проблем электромагнитной совместимости, связанное, прежде всего, с необходимостью разработки циклограмм совместного функционирования во временной, пространственной, частотной и энергетической областях всех информационных элементов ИАК;
· показатели эффективности и режимы работы БРЛС должны обеспечивать логику выбора приоритетных источников информации и её совместной обработки при неодновременном приходе измерений;
· усложнение процедур обоснования тактических показателей, обусловленное необходимостью учёта интересов других составных частей ИАК;
· обеспечение единых алгоритмов управления режимами работы БРЛС и траекторией полёта носителя.
Расширение номенклатуры обслуживаемых целей и потребителей информации требует повышения роли каналов информационного обмена как внутри РЛС, так и с внешними источниками и потребителями.
Важно отметить, что необходимость решения всего комплекса информационно-управленческих задач фактически превращает БРЛС в интеллектуальную систему автоматического управления процедурами обработки сигналов.
Для уточнения перечня первоочередных теоретических, прикладных и технологических задач необходимо провести анализ изменений в условиях применения, которые необходимо учитывать при разработке БРЛС нового поколения .
Основная часть этих изменений, обусловленных стратегией бесконтактных сетецентрических войн, предопределяется [1]:
● возможностью нанесения ударов по любому участку территории противника;
● преобладанием роли групповых действий как средств нападения, так и защиты;
● появлением новых видов боевой техники с качественно новыми свойствами: сверхманёвренные (СМЛА) и гиперзвуковые (ГЗЛА) летательные аппараты, высокоскоростные наземные и надводные объекты;
● переносом центра тяжести ведения боевых действий на беспилотные летательные аппараты (БЛА);
● усилением роли информационного превосходства.
Первая особенность актуальна для России с её огромной территорией и информационной оголённостью северных направлений. Это предопределяет необходимость разработки БРЛС, базирующихся на мобильных носителях, обеспечивая максимально возможное информационно-управляющее территориальное покрытие.
В свою очередь, это предъявляет требования к типажу средств противодействия (авиационные комплексы радиолокационного дозора и наведения, дальние перехватчики, беспилотные летательные аппараты (БЛА) различного назначения и т. д.) с соответствующими требованиями к БРЛС.
Групповые действия средств нападения и защиты предполагают решение целого комплекса задач. К этим задачам, прежде всего, относятся необходимость использования режима многоцелевого сопровождения в качестве основного боевого режима, обеспечивающего решение задач целераспределения, более достоверное и адекватное ранжирование целей по степени важности, выдачу команд целеуказания средствам поражения с требуемой точностью. Кроме того, БРЛС должна будет обеспечивать разрешение целей в плотных группах и устойчивое функционирование в условиях «роя», когда количество целей превышает пропускную способность РЛС.
Появление боевой техники с качественно новыми свойствами (СМЛА, ГЗЛА и т. д.) обусловливает необходимость использования более сложных алгоритмов управления и их информационного обеспечения, основанных на учёте инерционности измерителей и более сложных моделей, положенных в основу синтеза. При этом существенно усложняется задача обеспечения устойчивости сопровождения этих целей.
Перенос центра тяжести ведения боевых действий на беспилотные летательные аппараты, преследующий цель снизить потери личного состава, предопределяет необходимость качественного повышения уровня интеллектуальности БРЛС, направленного как минимум на решение пяти задач: анализ обстановки, прогноз её изменения, принятие решения, его реализацию и контроль результатов выполнения решения.
Усиление роли информационного обеспечения в отношении БРЛС предполагает необходимость не только защиты своей информации, но и нарушения работы информационных систем противоборствующей стороны. Последнее предполагает возможность использования режимов алгоритмических воздействий [7] и электромагнитного оружия [8].
В свою очередь, отмеченные особенности функционирования БРЛС в условиях бесконтактных сетецентрических войн требуют решения целого ряда теоретических, прикладных и технологических задач.
К теоретическим проблемам, прежде всего, относятся:
● пересмотр традиционных базовых соотношений, лежащих в основе оптимизации систем наведения и БРЛС и базирующихся на представлении летательных аппаратов и используемых измерителей как материальных точек (без учёта инерционности), использовании упрощённых моделей движения, основанных на гипотезе прямолинейного движения с постоянной скоростью и линейных представлений о связях относительного и абсолютного движений цели и носителя РЛС;
● разработка теории оптимизации на основе более адекватных к условиям применения показателей совершенства (система-среда), к которым, прежде всего, относятся живучесть, информативность, динамичность и чувствительность [9];
● целесообразность использования многоэтапной оптимизации, учитывающей всю цепочку: цель, РЛС, носитель, средства поражения.
Необходимо отметить, что в приложении к СМЛА и ГЗЛА существующая аксиоматика, основанная на использовании упрощённых моделей и линейных представлений, не позволяет реализовать высокоэффективные системы перехвата этих целей.
Необходимость перехода к более сложным критериям качества по сравнению с традиционным критерием минимума среднеквадратичных ошибок, обусловлена тем, что в системах, оптимизированных по этому критерию, не учитываются реальные ограничения, которые всегда имеют место в процессе функционирования РЛС. В связи с этим, целесообразно использовать хорошо зарекомендовавшие себя более сложные интегральные квадратичные критерии, широко используемые в теории управления, позволяющие ещё на этапе синтеза учесть большинство реальных ограничений [10]. Такой подход тем более желателен в условиях унифицированного, стандартизованного производства используемой элементной базы (узлов, устройств), которое всегда накладывает дополнительные ограничения на процедуры оптимизации.
За последние десятилетия получают всё большее распространение так называемые системные показатели [9], позволяющие оценить степень совершенства РЛС с учётом ограничений в различных условиях применения в рамках подхода «система-среда». К таким показателям, наряду с эффективностью, относят живучесть, информативность, динамичность и чувствительность. В математическом плане эти показатели образуют взаимно пересекающиеся множества, поскольку характеризуя различные стороны качества работы РЛС, зачастую зависят от одних и тех же факторов (условий применения). Взаимосвязи между этими показателями показаны на рис. 1.

Рис. 1. Взаимосвязи между системными показателями.
Несомненным достоинством использования этих системных показателей является возможность оценить совершенство РЛС в рамках всей цепочки: цель (фоноцелевая обстановка), БРЛС, носитель, средства поражения (потребители информации) с выделением наиболее слабых звеньев в этой цепи.
Живучесть характеризует уязвимость РЛС к внешним негативным воздействиям и способность восстанавливать работоспособность после повреждений и спадов. Нет смысла говорить об эффективности БРЛС, если она обладает низкой живучестью, обусловленной, прежде всего, низкой скрытностью при работе на излучение. Основные направления повышения живучести РЛС в составе ИАК проиллюстрированы рис. 2.
Среди наиболее эффективных направлений повышения живучести необходимо выделить использование многопозиционного принципа построения РЛС и необходимость использования электромагнитного оружия (ЭМО) [8]. Последнее предполагает два варианта повышения живучести. Один из них связан с необходимостью разработки эффективных средств защиты от СВЧ оружия функционального поражения, а второе его использование как средства поражения радиоэлектронных систем средств нападения противоборствующей стороны, обеспечивая тем самым повышение живучести носителя, а соответственно и БРЛС.

Рис. 2. Направления повышения живучести бортовых РЛС
Весьма перспективным является использование режима ЭМО на базе мощных сверхкоротких импульсов и для решения чисто информационных задач в своих интересах.
Информативность РЛС характеризует её способность извлекать информацию из электромагнитных полей, осуществлять относительно неискажённую обработку сигналов и передачу информации к потребителю [11,12].
Следует подчеркнуть, что от информативности напрямую зависят и эффективность, и живучесть, и динамичность образующие области как совместных, так и попарных связей.
Основные направления повышения информативности и её связи с другими системными показателями отображаются схемой, показанной на рис. 3.
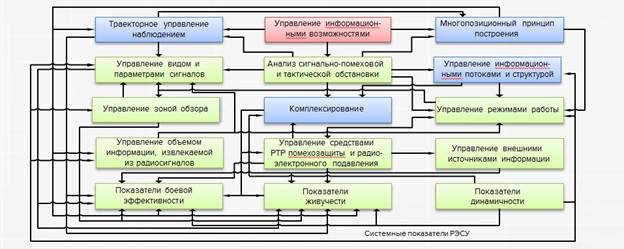
Рис. 3. Основные направления повышения информативности и её связи с другими системными показателями
Среди приёмов повышения информативности необходимо выделить два наиболее обещающих направления [13].
Первое из них связано с использованием так называемого траекторного управления, суть которого состоит в использовании таких траекторий носителя, которые наряду с выполнением его конечных задач обеспечивают наилучшие условия для радиолокационного наблюдения [6].
Второе связано с использованием многопозиционного принципа построения бортовых РЛС [14], в рамках которого траекторное управление наблюдения обеспечивает ещё более высокую информативность за счёт управления пространственной геометрией системы.
Динамичность РЛС характеризует её способность адекватно реагировать на изменение фоноцелевой обстановки, обеспечивая максимально возможные показатели эффективности, информативности и живучести. Связи динамичности РЛС с динамичностью цели, носителя и оружия и их влияние на другие системные показатели иллюстрируются схемой, показанной на рис. 4.
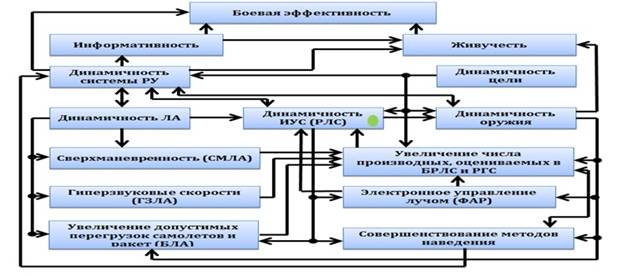
Рис. 4. Связи динамичности РЛС с динамичностью цели, носителя и оружия и их влияние на другие системные показатели
Следует подчеркнуть, что все перечисленные системные показатели, как правило, противоречат друг другу. Особенно это относится к живучести и информативности.
В связи с этим нахождение компромиссного сочетания живучести, информативности и динамичности является нетривиальной задачей.
Необходимо отметить, что к настоящему времени в цепи: цель – РЛС – носитель – оружие самым слабым звеном по динамичности является БРЛС. Нет смысла разрабатывать сверхманёвренные самолёты, если БРЛС будет неспособна бессрывно и с высокой точностью обнаруживать сверхманёвренные цели со сверхманёвренного носителя.
Динамичность цели и носителя в значительной степени влияют на алгоритмы как первичной, так и вторичной обработки БРЛС. Анализ, проведённый в [9] показывает, что, прежде всего, для повышения динамичности БРЛС необходимо в алгоритмах первичной обработки учитывать относительные ускорения системы цель-носитель, а в процедурах сопровождения использовать оценки более высоких производных дальности, скорости и угловых координат.
Проведённый анализ показал, что практически единственным способом одновременного улучшения показателей живучести и информативности является использование многопозиционного принципа построения РЛС.
Однако создание многопозиционной БРЛС, давая качественные преимущества по сравнению с однопозиционными системами, приводит к существенному усложнению алгоритмов совместного функционирования, до недавнего времени препятствовавшему их широкому распространению.
Эти усложнения обусловлены рядом причин, к которым относятся:
· появление более высокого иерархического уровня, на котором осуществляется распределение функции между РЛС-позициями в составе многопозиционных систем наведения;
· необходимость формализации информационных потоков внутри МП РЛС, обоснования критериев и показателей качества совместной работы;
· обеспечение взаимной синхронизации;
· управление способами информационного обмена между позициями (активный, полуактивный, пассивный);
· отождествление измерений;
· управление радиоэлектронной защитой и электромагнитной совместимостью;
· зависимость системных показателей РЛС от геометрии взаимного расположения позиций, что приводит к дополнительному усложнению алгоритмов обработки сигналов, направленному на предотвращение ухудшения этих показателей.
2. Общесистемные вопросы разработки. Прикладные проблемы
В этой связи целесообразно рассмотреть общесистемные подходы к разработке бортовых радиолокационных систем, определяемые их ролью и местом в составе многопозиционных систем наведения и интегрированных авиационных комплексов, а также прикладные проблемы, которые необходимо решать при создании перспективных авиационных информационно-управляющих систем.
Изменение условий применения, обусловленных стратегией бесконтактных сетецентрических войн, статуса бортовой РЛС (БРЛС) в составе интегрированного авиационного комплекса (ИАК) [15] и многопозиционных систем наведения (МПСН) [16] потребовали глубокой модернизации существующих и разработки новых режимов работы и соответствующих алгоритмов обработки сигналов на всех этапах их функционирования. Однако необходимо подчеркнуть, что модернизация существующих и разработка новых алгоритмов поиска целей, обнаружения, распознавания, сопровождения и т. д. должны выполняться с учётом общесистемных подходов к разработке БРЛС как составной части многопозиционных систем наведения и интегрированного авиационного комплекса.
Существенной частью этих подходов является качественное усиление роли управляющих режимов, непосредственно влияющих на БРЛС и показатели её совершенства, и используемых не только для управления режимами её работы, но и для решения непосредственно информационных задач на базе траекторного управления наблюдением [17].
В связи с этим существенно изменился взгляд на процедуры оптимизации БРЛС, которые должны обеспечивать не только её максимальный вклад в решение общих задач в рамках МПСН и ИАК, но и другие требования к системным и частным показателям эффективности, живучести, информативности и динамичности [18].
В первую очередь, среди управленческих режимов следует выделить:
· управление тактическим назначением носителя (ударный, информационный, отвлекающий и т. д.), определяющее роль и режимы работы БРЛС в составе МПСН;
· управление пространственным положением носителя в составе МПСН, непосредственно влияющее на показатели эффективности БРЛС;
· управление режимами информационного взаимодействия позиций (активный, полуактивный, пассивный, комбинированный), непосредственно влияющим на режимы работы БРЛС и используемые в них алгоритмы обработки сигналов;
· управление первичными полями БРЛС с АФАР в составе МПСН.
Совокупность этих режимов управления предопределяет требования к расширению многофункциональности и многорежимности БРЛС.
На уровне однопозиционных ИАК необходимо выделить:
· выбор приоритетных источников информации на борту и их взаимоотношений с другими источниками на различных этапах выполнения полётного задания;
· управление режимами работы и параметрами сигналов всех информационных датчиков на борту, обеспечивающее их адаптацию под условия применения и электромагнитную совместимость во временной, частотной, пространственной и энергетической областях;
· использование единых алгоритмов управления режимами работы БРЛС и траекторией носителя, обеспечивающей траекторное управление наблюдением [19];
· обеспечение всеэтапного согласования работы БРЛС как с другими элементами ИАК и их режимами по информативности и динамичности [18], так и этапов в самой БРЛС.
Упрощённая схема связей БРЛС, летательного аппарата и объекта поражения (цели) в процессе наведения показана на рис. 5.
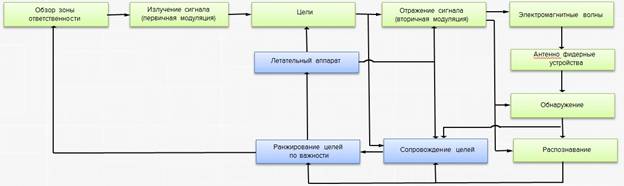
Рис. 5. Упрощённая схема связей цели, БРЛС и летательного аппарата в процессе наведения
Кроме того, существенно усилилась роль режимов и составных частей бортового оборудования, на первый взгляд, не связанных с решением радиолокационных задач, но оказывающая большое влияние на все системные показатели БРЛС. К таким режимам относятся не только процедуры обмена информацией между составными частями БРЛС, но и с внешними источниками, что потребует их согласования по информативности и динамичности.
Принципиально новым при разработке облика БРЛС нового поколения является необходимость использования режимов работы со сверхкороткими импульсами не только для решения информационных задач, но и в качестве электромагнитного оружия, обеспечивающего вывод из строя полупроводниковой элементной базы средств нападения [20,21].
Ещё одним очень важным для разработки БРЛС вариантом комплексного подхода является обязательность предъявления требований к ним не столько из интересов самой БРЛС, сколько из интересов всей системы наведения, исходя из используемых алгоритмов траекторного управления системы наведения, которая и определяет перечень и точность оцениваемых координат.
Прикладной характер проблем разработки предопределяет необходимость адаптации существующих и новых теоретических разработок под решение конкретных задач поиска, обнаружения, распознавания, сопровождения и т.д., обеспечивающих их эффективное выполнение на длительную перспективу в более сложных условиях функционирования.
Ниже будут рассмотрены наиболее важные, на наш взгляд, прикладные проблемы разработки бортовых РЛС нового поколения, требующие первоочередного решения. К этим проблемам, прежде всего, относятся:
· адаптация работы РЛС не только на приём, но и на излучение, включая оптимизацию процедур поиска целей;
· обеспечение обнаружения целей при соотношениях энергии сигнала к спектральной плотности шумов близкой к единице в условиях интенсивного манёвра;
· достоверное распознавание целей вплоть до их типа;
· организация синтезирования апертуры антенны в передней полусфере;
· обеспечение высокой точности и достоверности многоцелевого сопровождения, позволяющее использовать данный режим в качестве основного боевого режима;
· оптимизация полуактивных и пассивных режимов работы БРЛС;
· использование сверхкоротких импульсов не только для решения информационных задач, но и в качестве электромагнитного оружия;
· оптимизация сопровождения в условиях роя с группированием целей по тактическим признакам.
Оптимизация поиска целей является сложной многоэтапной процедурой, включающей выбор способа обзора зоны ответственности, алгоритмы обработки сигналов и правила принятия решения о наличии целей.
Наиболее перспективным является использование адаптивных способов обзора, при которых имеется обратная связь, реализующая управление обзором по результатам обнаружения и сопровождения целей на предыдущем цикле.
Процедура оптимизации просмотра зоны обзора и её конфигурации может быть существенно упрощена, если использовать в качестве целеуказаний результаты ранжирования целей по степени важности, выполняемой в процессе многоцелевого сопровождения [22-29].
Необходимость получения требуемого запаса времени при противодействии ГЗЛА требует качественного увеличения дальности обнаружения и сопровождения, что, в свою очередь, предполагает разработку алгоритмов обнаружения при соотношении энергии сигнала к спектральной плотности шумов, близком к единице. Единственным способом решения этой задачи является использование длительного когерентного накопления. Однако при использовании типовых алгоритмов обнаружения можно увеличить дальность обнаружения только неманеврирующих целей.
При сопровождении интенсивно маневрирующих целей существующие алгоритмы обнаружения необходимо модернизировать.
Это обусловлено тем, что при длительном когерентном накоплении во время манёвра за счёт вторичной модуляции проявляются квадратичные набеги фазы, приводящие к возникновению в отражённом сигнале частотной модуляции, расширению его спектра, уменьшению спектральной плотности и к снижению уровня сигнала на входе порогового устройства системы обнаружения и, соответственно, дальности обнаружения и сопровождения СМЛА [31].
Отсюда необходимо решить проблему учёта в опорном сигнале (согласованном фильтре) ускорений относительного движения цель — носитель РЛС в рамках первичной обработки сигналов.
Сложные пространственные эволюции СМЛА, при которых в отслеживаемых координатах появляются вторые и более высокие производные, приводят к существенному ухудшению точности радиолокационного сопровождения и даже к его срыву.
В то же время перспективные методы наведения на СМЛА требуют учёта в алгоритмах траекторного управления такого же числа производных. В связи с этим алгоритмы автоматического слежения должны формировать оценки по высокоразмерным моделям, что требует принятия специальных мер по предотвращению расходимости процессов фильтрации, особенно при малом числе первичных измерителей.
Особую значимость приобретает совершенствование алгоритмов многоцелевого сопровождения, позволяющее преобразовать его в основной информационный режим без перехода в режим захвата и сопровождения одной цели.
Решение этой задачи возможно при переходе от стробовой (пороговой) идентификации измерений к бесстробовой (экстремальной) и использованию алгоритмов адаптивной аналого-дискретной фильтрации [15, 30].
Специфической задачей многоцелевого сопровождения является разработка алгоритмов автоматического слежения в условиях «роя», когда число целей превышает пропускную способность БРЛС.
Очень важным направлением совершенствования бортовых РЛС является разработка высокодостоверных алгоритмов ранжирования целей по степени их важности, влияющих на все этапы функционирования, начиная от управления очерёдностью зондирования угловых позиций в процессе обзора и заканчивая алгоритмами формирования всех оценок координат состояния системы «цель — носитель РЛС», используемых для траекторного управления носителем и выдачи команд целеуказания средствам поражения [25].
Необходимо отметить, что получение эффективной процедуры ранжирования, пригодной для всех случаев боевого применения, невозможно. Эти процедуры должны быть адаптированы под решение конкретных задач, выполняемых носителем, и обеспечивать выделение не только наиболее опасных целей, но и целей, наиболее благоприятных для поражения [32].
Ещё одним из режимов, влияющих не только на работу РЛС, но и на функционирование систем более высокого уровня иерархии, в том числе и на алгоритмы траекторного управления, используемых в системе наведения носителя, является распознавание целей [33,34].
Одним из основных способов борьбы со средствами радиоэлектронного противодействия и повышения живучести является использование пассивных режимов работы РЛС, дающих ещё и возможность увеличения дальности обнаружения носителей источников радиоизлучения. Основной проблемой использования пассивных режимов является необходимость достаточно точного оценивания дальности и скорости сближения, знание которых необходимо для решения задач наведения. Необходимо отметить, что при использовании многопозиционных систем эта задача имеет удовлетворительное решение.
В заключение необходимо отметить, что проблема оптимизации такой сложной системы как БРЛС является многоэтапной, многоальтернативной и многокритериальной задачей, на пути решения которой необходимо решить целый комплекс теоретических и прикладных проблем, в том числе и не имеющих однозначного решения [29,35,43].
Рассмотренные выше проблемы системного плана разумеется не исчерпывают всю совокупность проблем, возникающих при разработке, но на наш взгляд определяют проблемы прикладного плана, которые необходимо решить в первую очередь.
3. Технологические проблемы разработки
В процессе создания бортовых РЛС нового поколения помимо озвученных существуют и проблемы технологического плана и критических технологий.
Каким бы совершенным не был разработанный облик бортовой РЛС (БРЛС), конечный результат её создания и эксплуатации определяется технологическими возможностями изготовителей. То есть используемые технологии являются естественным ограничителем, характеризующим реальные возможности и показатели совершенства БРЛС [36].
В общем случае технологии определяют все аспекты процессов, охватывающих весь жизненный цикл БРЛС, включая поддержку разработки, саму разработку, эксплуатацию, отработку моделей подсистем и систем в целом, разработку тренажёров, подготовку специалистов и выпуск документации.
В связи с этим уже на первоначальном этапе разработки БРЛС должны учитываться технологические возможности по реализации разрабатываемых систем. Это определяется тем, что любая технология имеет предел своего использования, под которым подразумевают предельные технологические параметры конечного продукта, наиболее важные для потребителя. Если предельные параметры уже не удовлетворяют потребителя, то неизбежно использование других технологий, обладающих большими возможностями.
Следует отметить, что при разработке таких сложных изделий как БРЛС, используются десятки и сотни различных технологий. Однако среди них несколько, имеющих решающее значение для её разработки, которые называют критическими технологиями.
Среди критических технологий долговременного использования, применение которых целесообразно при разработке БРЛС нового поколения [37] на наш взгляд необходимо прежде всего выделить:
1. Изготовление сложных полупроводников и микроэлектронных изделий, направленное на получение сверхчистых полупроводниковых материалов, дающих возможность обеспечить серийное производство надёжных сверхмалых интегральных устройств для использования в перспективных высокоскоростных ЭВМ, сверхчувствительных приёмниках, различных устройствах автоматического управления и т.д.
2. Интегральную оптику и волоконно-оптические линии связи, целью которых является разработка надёжных малогабаритных оптических устройств памяти и обработки сигналов и данных, а также световодов с низкими потерями для систем связи, навигации, радиолокации и т.д. В последнее время всё больше значения приобретают технологии радиофотоники. [38]
3. Разработку средств функционального поражения и средств защиты от них, связанную, прежде всего с созданием микроволновых генераторов большой мощности, применяемых в системах электромагнитного оружия для вывода из строя или разрушения полупроводниковой техники различного назначения. В связи с развитием СВЧ-оружия функционального поражения чрезвычайно важной является технология разработки и эксплуатации средств защиты БРЛС от поражающих СВЧ-импульсов [39].
4. Систему автоматического распознавания целей, основанную на разработке банка данных сигналов различных целей, соответствующих архитектур бортовых ЦВМ, алгоритмов и методов обработки сигналов для обнаружения, классификации и сопровождения целей в реальном масштабе времени. Эти технологии имеют особенно важное значение для самолёта-носителя, предопределяя тактику его действий.
5. Для создания БРЛС нового поколения очень важными являются технологии производства приёмопередающих модулей активных фазированных антенных решёток (АФАР). Использование АФАР, давая возможность формировать электронно-управляемые лучи различной формы, позволяет решить целый комплекс проблем, в том числе:
· Возможность обеспечения программируемого обзора с высокоточным многоцелевым сопровождением [40].
· Одновременная работа РЛС в нескольких режимах по воздушным и наземным целям.
· Управление мощностью излучения, адаптированное под конкретную целевую обстановку, и формирование многолучевых диаграмм направленности и провалов в направлении источников помех для решения задач РЭП и контрРЭП.
Необходимо подчеркнуть, что технология АФАР [41] позволяет создавать эффективные РЛС с высокими показателями живучести и информативности при соблюдении двух условий:
● при одновременной разработке комплекса алгоритмов и программ бортовой РЛС, обеспечивающих реализацию всех преимуществ электронного способа управления лучами антенны;
● при разработке высокоэффективных средств защиты от СВЧ-оружия функционального поражения.
Без учёта последнего условия РЛС с АФАР будет представлять собой дорогостоящее изделие мирного времени.
6. Технологию объединения данных, направленную на разработку многофункциональных систем совместной обработки информации от всех источников, прежде всего, поступающей от РЛС, ОЭС, станций РТР, бортового комплекса радиоэлектронного подавления, спутниковых и бортовых навигационных систем и т.д. Объединение данных от различных источников подразумевает и аппаратно-программную интеграцию всех бортовых информационных систем [42].
7. Технологии искусственного интеллекта. Усложнение условий функционирования БРЛС и использование разветвлённой сети информационных режимов обусловили возрастание информационно-психологических нагрузок на экипаж и усиление ответственности за последствия принятых решений, что предопределяет усиление роли информационных технологий на базе искусственного интеллекта. Системы искусственного интеллекта отличаются от обычных адаптивных систем прежде всего использованием опыта наиболее подготовленных специалистов-профессионалов на базе рекомендаций, полученных в процессе экспертных оценок, способностью решать задачи, в которых отсутствуют чётко формализованные правила переработки информации, и способностью обучаться в процессе функционирования.
Необходимо отметить два аспекта технологий создания искусственного интеллекта. Один из них связан с дозированием входной информации и предоставлении её в наиболее удобном для восприятия виде. Другой связан с разработкой альтернативных вариантов принятия решений, из которых оператор (лётчик) и выбирает одно, наиболее соответствующее обстановке.
За последнее время существенно возрастает интерес к разработке технологий обеспечения электромагнитной совместимости источников радиоизлучения в составе многофункциональных многодиапазонных информационных систем.
Следует подчеркнуть, что конечный результат создания БРЛС и её эксплуатации во многом зависит от квалификации пользователей и обслуживающего персонала. В связи с этим значительно усилилась роль технологий разработки обучающих систем (тренажёров) и подготовки кадров обслуживающего персонала.
Разработка новых технологий является очень дорогостоящей процедурой, поэтому одним из основных направлений создания их является множественность применения. Наиболее простыми примерами являются технологии создания новой элементной базы, АФАР, ЭВМ, искусственного интеллекта и т.д. Кроме того, весьма востребованными являются технологии разработки базовых вариантов многофункциональных информационных систем, допускающих получение их модификаций без серьёзных доработок.
При этом, как правило, используются так называемый эволюционный синтез технологий, базирующийся на максимально возможном использовании прототипов и анализе их узких мест.
Однако обязательным условием использования той или иной технологии является её соответствие современному состоянию, определяемому технологическими укладами, характеризующими совокупность сопряжённых производств, имеющих единый технический уровень. К настоящему времени общий уровень развития технологий должен соответствовать пятому и более высокому — шестому укладам.
Признаки шестого уклада подразумевают:
· резкое снижение энергоёмкости и материалоёмкости производства;
· использование нанотехнологий;
· контролируемое машинное самообучение и сетецентрическое взаимодействия самообучающихся систем;
· способность функционирования в шестимерном пространстве: трех координат, времени, частоты, энергии.
В общем случае, в процессе выбора и реализации конкретных технологий необходимо учитывать следующие факторы:
1. Опережающий программный, а не аппаратный способ развития техники.
2. Используемые технологии должны соответствовать современному и ещё лучше перспективному технологическому укладу и глобальным технологиям: нано, сетецентрические и т.д.
3. Достижение разумного компромисса между противоречащими друг другу технологиями. К таким технологиям прежде всего относят:
· разработку микроминиатюрной элементной базы со всё более тонкими технологическими слоями и технологии защиты от СВЧО функционального поражения;
· постоянное увеличение объёма информации, используемой для решения тактических задач и возможностями её адекватного отображения и использования при принятии решений;
· возможности БВС по реализации теоритических алгоритмов функционирования. С другой стороны, улучшение возможностей бортовых вычислительных систем по быстродействию и памяти дают возможность реализовать всё более сложные многомерные алгоритмы обработки информации и управления.
4. Как правило, бортовые РЛС уже не играют самостоятельной роли и являются составной частью интегрированных информационно-управляющих систем более высокого иерархического уровня, что предопределяет необходимость учёта влияния технологий её разработки на системные показатели всего комплекса бортового оборудования.
5. Необходимость учёта ухудшения реальных показателей совершенства РЛС по сравнению с её потенциальными показателями, заложенными в облике.
Проведённый анализ позволяет определить перечень критических технологий [43,44], которые необходимо использовать при создании перспективных бортовых РЛС.
Без решения технологических проблем невозможно получить современную бортовую РЛС, отвечающую требованиям длительной эксплуатации.
Заключение
Поднятые в работе проблемы на наш взгляд отражают основные тенденции развития радиолокации в целом. Решение данных проблем позволит создать РЛС нового поколения, которые по праву можно будет назвать высокоинтеллектуальными техническими системами или, как часто модно говорить, системами искусственного интеллекта.
Однако, весь объем рассмотренных проблем не под силу решить одной какой-либо разрабатывающей организации. Требуется тесная кооперация разрабатывающих организаций, академических институтов, вузовской науки.
Только в этом случае возможно создание радиолокационных систем и комплексов нового поколения, способных решать задачи, стоящие перед радиолокацией в будущем.
Литература
1 Федосов Е. А. Реализация сетецентрической технологии ведения боевых действий потребует создания БРЛС нового поколения // Фазотрон, 2007, №1,2.
2 Интеллектуальные системы тактического уровня на борту летательных аппаратов: фрагменты их баз знаний / Под ред. акад. РАН Е. А. Федосова. — М. : НКЦ ГосНИИАС, 2013.
3 Канащенков А. И., Меркулов В. И., Герасимов Л. А. и др. Радиолокационные системы многофункциональных самолётов. Т. 1. РЛС — информационная основа боевых действий многофункциональных самолётов. Системы и алгоритмы первичной обработки радиолокационных сигналов / Под ред. А. И. Канащенкова и В. И. Меркулова. — М. : Радиотехника, 2006.
4 Бортовые системы управления боевыми режимами современных и перспективных самолётов. Кн. 1. Аналитический обзор по материалам зарубежных информационных источников / Под ред. акад. РАН Е. А. Федосова. — М. : НКЦ ГосНИИАС, 2009.
5 Ярлыков М. С., Богачев А. С., Меркулов В. И., Дрогалин В. В. Радиоэлектронные комплексы навигации, прицеливания и управления вооружением летательных аппаратов. Т. 1. Теоретические основы / Под ред. М. С. Ярлыкова, — М. : Радиотехника, 2012.
6 Меркулов В. И. Улучшение системных показателей бортовых РЛС за счёт траекторного управления наблюдением // Журнал радиоэлектроники. — 2012. — № 1. — http//re/cp/ire/ru/jre/jan12/index.htm/.
7 Меркулов В. И., Забелин И. В. Траекторное управление наблюдением как способ создания преднамеренных алгоритмических воздействий на радиолокационные системы. // Радиотехника, 2010,№ 7.
8 Добыкин В. Д., Куприянов А. И., Шустов Л. Н. Радиоэлектронная борьба. Силовое поражение радиоэлектронных систем. — М. : Вузовская книга, 2007.
9 Верба В. С. Системные показатели авиационных радиоэлектронных систем управления // Успехи современной радиоэлектроники, 2013, №1.
10 Меркулов В. И., Дрогалин В. В., Лепин и др. Авиационные системы радиоуправления. Т. 1. Принципы построения систем радиоуправления. Основы синтеза и анализа / Под ред. А. И. Канащенкова и В. И. Меркулова — М. : Радиотехника, 2003.
11 Верба В. С., Меркулов В. И. Информативность радиоэлектронных систем управления. Состояние и тенденции развития // Радиотехника, 2013, №4.
12 Быстров Р. П., Потапов А. А., Соколов А. В. Миллиметровая радиолокация с фрактальной обработкой — М. : Радиотехника, 2005.
13 Черняк В. С. Многопозиционная радиолокация — М. : Радио и связь, 1993.
14 Меркулов В. И. Концептуальный подход к управлению информативностью радиолокационных систем //Успехи современной радиоэлектроники, 2011, №10.
15 Ярлыков М. С., Богачев А. С., Меркулов В. И., Дрогалин В. В. Радиоэлектронные комплексы навигации, прицеливания и управления вооружением летательных аппаратов. Т. 1. Теоретические основы. / Под ред. М. С. Ярлыкова. — М. : Радиотехника, 2012. — 504 с.
16 Верба В. С., Меркулов В. И. Многопозиционные радиоэлектронные системы наведения. Возможности и ограничения. // Информационно-измерительные и управляющие системы. — 2010. — Т. 8. — № 1.
17 Меркулов В. И. Траекторное управление наблюдением и показателями эффективности бортовых РЛС. // Радиотехника. — 2010. — № 7.
18 Верба В. С. Системные показатели авиационных радиоэлектронных систем управления. // Успехи современной радиоэлектроники. — 2013. — № 1.
19 Верба В. С. Авиационные комплексы радиолокационного дозора и наведения. Принципы построения, проблемы разработки и особенности функционирования. — М. : Радиотехника. — 2014. — 526 с.
20 Меркулов В. И., Добыкин В. Д., Дрогалин В. В. Функциональное поражение радиоэлектронных систем // Фазотрон. — 2006. — № 3, 4.
21 Добыкин В. Д., Куприянов А. И., Пономарев В. Г., Шустов Л. Н. Радиоэлектронная борьба. Силовое поражение радиоэлектронных систем. — М. : Вузовская книга, 2007.
22 Ким Д. П. Методы поиска и преследования подвижных объектов — М. : Наука, 1989.
23 Теоретические основы радиолокации. / Под ред. Я. Д. Ширмана. — М. : Сов. радио, 1970. — 560 с.
24 Васильев О. В., Меркулов В. И., Карев В. В. Управляемый радиолокационный поиск воздушных целей. // Зарубежная радиоэлектроника. Успехи современной радиоэлектроники. — 2002. — № 1.
25 Меркулов В. И., Дрогалин В. В., Богачев А. С. и др. Авиационные системы радиоуправления. Т. 2. Радиоэлектронные системы самонаведения. / Под ред. А. И. Канащенкова и В. И. Меркулова. — М. : Радиотехника, 2003. — 390 с.
26 Меркулов В. И., Дрогалин В. В., Богачев А. С. и др. Авиационные системы радиоуправления. Т. 1. Принципы построения систем радиоуправления. Основы синтеза и анализа. / Под ред. А. И. Канащенкова и В. И. Меркулова. — М. : Радиотехника, 2003. — 192 с.
27 Wirth W. D. Fast and efficient target search with phased array radars. // Proc. IEEE International Radar Conference, Arlington, VA. — 1975.
28 Danneman H. Optimale Suchverfahren fur Elektronisches Radar. // Nachrichtentechnische. — 1973. — № 26.
29 Меркулов В. И. Концептуальный подход к управлению информативностью радиолокационных систем. // Успехи современной радиоэлектроники. — 2011. — № 10.
30 Ярлыков М. С., Богачев А. С., Меркулов В. И., Дрогалин В. В. Радиоэлектронные комплексы навигации, прицеливания и управления вооружением летательных аппаратов. Т. 2. Применение авиационных радиоэлектронных комплексов при решении боевых и навигационных задач. / Под ред. М. С. Ярлыкова. — М. : Радиотехника, 2012. — 256 с.
31 Ильчук А. Р., Меркулов В. И., Самарин О. А., Юрчик, И. А. Влияние интенсивного маневрирования целей на показатели эффективности системы первичной обработки сигналов в бортовых РЛС. // Радиотехника. — 2003. — № 6.
32 Канащенков А. И., Меркулов В. И., Самарин О. Ф. Облик перспективных бортовых РЛС. Возможности и ограничения. — М. : ИПРЖР, 2002. — 176 с.
33 Фукунага К. Введение в статистическую теорию распознавания образов. — М. : Наука, 1979.
34 Канащенков А. И., Меркулов В. И., Герасимов А. А. и др. Радиолокационные системы многофункциональных самолетов. Т. 1. РЛС — информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А. И. Канащенкова и В. И. Меркулова. — М. : Радиотехника, 2006. — 656 с.
35 Меркулов В. И. Динамичность бортовых радиолокационных систем // Радиотехника. — 2015. — № 1.
36 Форстер Р. Обновление производства: атакующий выигрывает. — М.: Прогресс, 1987.
37 Перспективные военные разработки: Авиастроение-Экспресс-информация. — 1989. — № 43.
38 Шулунов А.Н. Применение радиофотоники в радиолокации. // Материалы 24 Международной Крымской конференции. КРЫМИКО, г. Севастополь, 2014.
39 Добыкин В. Д., Куприянов А. И., Пономарев В. Г., Шустов Л. Н. Радиоэлектронная борьба. Силовое поражение радиоэлектронных систем. — М. : Вузовская книга, 2007.
40 Васильев О. В., Меркулов В. И., Карев В. В. Управляемый радиолокационный поиск воздушных целей. // Зарубежная радиоэлектроника. Успехи современной радиоэлектроники. — 2002. — № 1.
41 Братчиков А. Н., Васин В. И., Василенко О. О. и др. Активные фазированные антенные решётки / Под ред. Д. И. Воскресенского и А. И. Канащенкова. — М. : Радиотехника, 2004.
42 Ярлыков М. С., Богачев А. С., Меркулов В. И., Дрогалин В. В. Радиоэлектронные комплексы навигации, прицеливания и управления вооружением летательных аппаратов. Т. 1. Теоретические основы. / Под ред. М. С. Ярлыкова. — М. : Радиотехника, 2012. — 504 с.
43 Верба В.С., Меркулов В.И., Черепенин В.А. Проблемы разработки бортовых РЛС нового поколения. Ч.1 РЛС в составе интегрированного авиационного комплекса. Условия применения. Системные показатели совершенства. // Наукоёмкие технологии, 2015, №10.
44 Верба В.С., Меркулов В.И., Черепенин В.А. Проблемы разработки бортовых РЛС нового поколения. Ч.2 Общесистемные вопросы разработки. Прикладные проблемы. // Наукоёмкие технологии, 2015, №11.