УДК. 621.396.67
МЕТОДЫ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ РАДИОЛОКАЦИОННЫХ СИСТЕМ
ТЕРАГЕРЦОВОГО ДИаПАЗОНА РАДИОВОЛН
Р. П. Быстров 1, В. Н. Корниенко1 , В. Е. Кузьмичев 2, В. Н. Пожидаев1, С. А. Соколов 1, В. А. Черепенин1
1 Институт радиотехники и электроники им. В.А. Котельникова РАН
2 3 Центральный научно исследовательский институт МО РФ
Статья получена 13 июля 2015 г.
Аннотация. Анализируются возможности имитационного моделирования работы радиолокационной системы терагерцового (ТГц) диапазона радиоволн с разработкой численных моделей и программно-алгоритмического обеспечения исследований распространения электромагнитного импульса в волноводных трактах с конечной проводимостью стенок и процесса дифракции электромагнитного импульса на объектах с дисперсией диэлектрической проницаемости. Рассматривается математическая модель вариантов построения устройств первичной обработки в РЛС ТГц диапазона радиоволн, подтверждающих обоснованность схемотехнических решений и достижения ими заданных характеристик. Предложены алгоритмы оптимальной обработки сигналов РЛС ТГц диапазона для решения задач обнаружения и распознавания физических объектов.
Ключевые слова: диапазон радиоволн, радиолокационная система, электромагнитный импульс, обнаружение (распознавание) объекта, обработка радиолокационного сигнала, численная модель, программное обеспечение, алгоритмы.
Abstract. The possibilities of a computer simulation of radar systems in terahertz (THz) range as the development of numerical models, software and algorithmic support, are investigated. The propagation of electromagnetic pulses in waveguides with finite wall conductivity and the diffraction of electromagnetic pulses on objects with the dispersion of dielectric permittivity are also analyzed. The mathematical model of the devices design for primary processing in modern THz radars, confirming chosen circuit solutions and achieving their desired characteristics, is considered. The complex algorithms are proposed for optimal processing of radar THz range signals to solve problems of detection and recognition of physical objects.
Keywords: frequency band, radar system, electromagnetic pulse, detection (recognition) of an object radar signal processing, numerical model, software, algorithms.
В последние годы повысился интерес к исследованиям особенностей распространения миллиметровых и субмиллиметровых радиоволн в атмосфере, что связано с рядом новых применений их при изучении космического пространства, природных ресурсов Земли, в локации и связи. При создании, например перспективных радиотехнических систем это, прежде всего, связано с совершенствованием радиолокационной техники с высоким разрешением и систем радиосвязи. Применительно к военной технике это вызвано, прежде всего, с тем, что современные боевые действия, чаще стали проводятся в ночных условиях, при задымлениях и в пыли от движущейся техники и разрывов снарядов, что в значительной степени снижается, а иногда и совсем исключается обнаружение и распознавание наземных объектов с помощью оптико-электронных устройств.
Находящиеся в эксплуатации РЛС обнаружения наземных объектов и наведения управляемого оружия, работающие в сантиметровом (СМ) и длинноволновой части миллиметрового (ММ) диапазонах волн, не всегда являются эффективными в распознавании малоразмерных наземных объектов (НО), особенно малоподвижных. Поэтому в подтверждение к выше сказанному требуется создание радиолокационных систем со сверхвысоким разрешением, которые способны на относительно небольших дальностях ~ 1000 - 4500 м, эффективно распознавать медленно движущиеся и неподвижные НО в условиях плохой оптической видимости. Такие радиолокационные системы могут быть базовыми также для систем наведения высокоточного оружия (ВТО) на небольших дальностях или на конечном участке траектории полета боевого баллистического объекта.
Такими более информационными участками СВЧ диапазона радиоволн, располагающиеся в интервалах: в короткой части миллиметрового (ММ) диапазона (длины волн – короче 3 мм: в «окнах прозрачности»: 2.15мм и 1, 3 мм) и в длинноволновой части субмиллиметрового (СБММ) диапазона (длины волн: «в окнах прозрачности»: 0,96 мм; от 0,88мм, 0,34 мм). Данный диапазон волн в указанных “окнах прозрачности” в современной научно-технической литературе стали называть часто терагерцовым (ТГц) диапазоном радиоволн [1-3]. Поэтому и по тексту в данной статье в качестве интересующего нас диапазона волн будем обращаться к ТГц диапазону радиоволн (интервал частот ~ 0,1 – 1 ТГц). Может быть правильнее в дальнейшем такой участок радиоволн и называть, как гигагерцовый (ГГц) диапазон.
Для систем (датчиков ближнего действия) обнаружения (распознавания) объектов и наведения на дальностях не более сотни метров не исключается также возможность исследований с целью освоения и “окон прозрачности” в СБММ диапазоне с длиной волны в районе 0,34 мм. Но это последующая задача.
Данная статья посвящается одному из современных проблемных вопросов в освоении ТГц высокоточных радиолокационных систем, относящихся к разработке методы математического моделирования радиолокационных систем ТГц радиоволн.
Известно, что математическое моделирование, при ответственном его применении, может быть достаточно эффективным инструментом при исследовании вновь создаваемых высокоточных радиолокационной системы. Такое моделирование может позволить не только оценить основные показатели качества работы РЛС еще до создания его экспериментального образца, но и сделать более обоснованным выбор функциональной схемы проектируемого устройства, а также алгоритмов принимаемых им решений.
Однако создание программы моделирования работы РЛС – достаточно сложная и трудоемкая задача. Она сводится к разработке математических моделей тех основных преобразований, которым подвергается р/л сигнал в ходе его обработки различными устройствами РЛС с целью оценки (измерения) тех его параметров, которые несут полезную информацию о цели. Так как любые радиотехнические измерения всегда проводятся на фоне шумов той или иной природы (например, собственного шума приемника), то задачи радиолокационного обнаружения цели и/или измерения ее координат и параметров движения необходимо рассматривать с привлечением статистических методов. Это означает, что математическое моделирование работы РЛС носит характер статистического моделирования.
В данной статье авторами предлагаются для рассмотрения и при необходимости будущей критики ряд научных вопросов, которые, по мнению авторов, являются на данном этапе освоения ТГц диапазона волн, а именно:
- имитационное моделирование работы радиолокатора:
- математические модели вариантов построения устройств первичной обработки в РЛС ТГц диапазона, подтверждающих обоснованность схемотехнических решений и достижения ими заданных характеристик;
- алгоритмы оптимальной обработки сигналов РЛС ТГц диапазона для решения задач обнаружения и распознавания (селекции) объектов техники.
1. ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ РАБОТЫ РАДИОЛОКАТОРА
Для разработки программы математического моделирования работы РЛС должны быть известны (заданы):
- зондирующий сигнал, который предполагается использовать в системе, т.е. должны быть заданы законы его амплитудной и, возможно, фазовой (частотой) модуляции;
- характеристики рассеивающих (отражающих) свойств возможных целей (например, ЭПР целей);
- те или иные характеристики среды распространения зондирующего и отраженного от цели сигналов;
- те или иные вероятностные характеристики тех помех, которые сопровождают прием полезного сигнала, отраженного от цели;
- структурная схема РЛС, т.е. последовательность тех математических преобразований (линейных и нелинейных), которым подвергается, при обработке, отраженный от цели сигнал, а также сопровождающая его помеха. Конечным результатом таких преобразований должно быть: либо решение о наличии (или отсутствии) отраженного от цели сигнала (в случае задачи обнаружения), либо измеренные значения тех параметров сигнала, которые несут информацию о положении цели в пространстве и/или о ее состоянии (при решении задачи измерения, например, дальности и скорости цели).
В ходе статистического моделирования работы РЛС могут быть получены оценки следующих основных характеристик качества работы РЛС:
- в случае обнаружения цели: вероятности правильного обнаружения и ложной тревоги, которые обеспечиваются данной системой;
- в случае измерения: среднеквадратические отклонения измеренных значений полезных параметров сигнала от их истинных значений, что однозначно характеризует точность измерения положения и скорости цели.
Компьютерное моделирование может быть проведено на основе комплексной модели, которая должна включать в себя отдельные (вообще говоря, автономные) блоки, описывающие следующие физические процессы:
- формирование и излучение электромагнитного сигнала;
- распространение прямого сигнала до цели;
- рассеяние сигнала на цели и окружающих ее объектах
- распространение рассеянного сигнала в направлении приемной антенны;
- особенности поведения сигнала в приемных трактах устройства.
Кроме того, на основе полученных данных о характеристиках принятого сигнала модель должна обеспечивать проведения обработки данных, позволять осуществлять оптимизацию этой обработки и, при необходимости, вырабатывать управляющие сигналы, направленные как на оптимизацию формы излучаемого сигнала для конкретной радиолокационной обстановки, так и на улучшение работы автоматизированной системы принятия решения.
В связи с этим предлагается следующий состав численной модели:
- блок моделирования прохождения широкополосного электромагнитного сигнала по антенно-фидерным устройствам приемного и передающего трактов;
- блок моделирования распространения сигнала в атмосфере, содержащей гидрометеоры и пр.;
- блок вычисления характеристик рассеивателей различной природы.
В данном разделе дано описание численных алгоритмов, которые могут быть использованы при реализации перечисленных выше блоков.
1.1. Численный алгоритм моделирования распространения электромагнитного импульса в волноводных трактах с конечной проводимостью стенок
Рассмотрим задачу определения пространственно-временных распределений электромагнитного поля в вакуумном объеме V, ограниченном проводящими поверхностями сложной формы. Поле в рассматриваемой системе возбуждается заданным набором источников с известными характеристиками.
Предположим, что диэлектрическая и магнитная проницаемости среды равны единице.
Для решения задачи временной динамики электромагнитного поля можно использовать дифференциальные уравнения Максвелла в пространственно-временном представлении, которые в Гауссовой системе единиц имеют вид:
 ,
,  ,
,  ,
,
 ,
,  ,
,  .
.
Рассмотрим три вида граничных условий:
- часть объема V ограничена идеально проводящими поверхностями. При этом тангенциальные составляющие электрического поля на границе области обращаются в ноль. Данное условие может быть использовано в случае, если проводимость ограничивающих объем поверхностей достаточно велика;
- на некоторых границах V выполнено условие излучения плоских волн, т.е. считается справедливым предположение, что структура электромагнитного поля вблизи границы области соответствует структуре плоской волны, волновой вектор которой параллелен нормали к поверхности. Такой вид граничных условий используется при описании открытых концов волноведущих трактов;
- объем содержит тела с конечной проводимостью. В этом случае на границе тел следует учитывать возбуждаемые поверхностные токи, величина которых, согласно закону Ома, пропорциональна действующему значению напряженности электрического поля.
Составим конечно-разностную аппроксимацию системы
уравнений. Для каждой из компонент введем в объеме V
пространственную сетку ![]() , узлы которой удовлетворяют
следующим рекурентным соотношениям:
, узлы которой удовлетворяют
следующим рекурентным соотношениям:
для Bx компоненты
![]()
![]()
![]()
для By компоненты
![]()
![]()
![]()
для Bz компоненты
![]()
![]()
![]()
для Ex компоненты
![]()
![]()
![]()
для Ey компоненты
![]()
![]()
![]()
для Ez компоненты
![]()
![]()
![]()
где ![]() - шаг пространственной сетки,
- шаг пространственной сетки, ![]() ,
,![]() ,
,![]() - количество узлов сетки по координатам x, y, и z
соответственно.
- количество узлов сетки по координатам x, y, и z
соответственно.
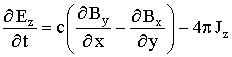
Такое расположение сеток дает возможность использовать центрированную схему аппроксимации пространственных производных. Взаимное расположение пространственных сеток представлено на рис. 1.
Узлы пространственных сеток компонент плотности тока совпадают с узлами соответствующих компонент электрического поля.
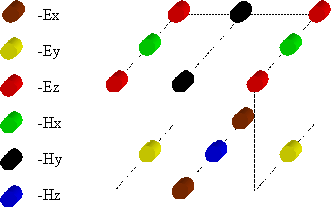
Рис.1. Пространственное расположение узлов сеток компонент электромагнитного поля.
Введем шаг
по времени ![]() ,
величина которого удовлетворяет условию Куранта:
,
величина которого удовлетворяет условию Куранта:
![]()
где ![]() - безразмерный коэффициент, величина которого зависит
от конкретной конфигурации проводников и характерных частот рассматриваемых
процессов. Значения сеточных функций компонент магнитного поля вычисляются в
моменты времени
- безразмерный коэффициент, величина которого зависит
от конкретной конфигурации проводников и характерных частот рассматриваемых
процессов. Значения сеточных функций компонент магнитного поля вычисляются в
моменты времени ![]() , такие, что:
, такие, что:
![]()
Электрическое поле определяется в моменты времени
![]()
Используя описанный сдвиг временных сеток, можно получить следующие конечно-разностные соотношения:





Здесь верхний индекс обозначает момент времени, нижний индекс до открывающейся круглой скобки - компоненту поля, нижние индексы в круглых скобках обозначают номер узла пространственной сетки.
Для решения задачи формирования электромагнитного поля в большинстве случаев используются нулевые начальные условия: значения компонент электромагнитного поля во всех точках рассматриваемого объема равны нулю, и сторонние токи в системе отсутствуют.
1.2. Численная модель процесса дифракции электромагнитного импульса на объектах с дисперсией диэлектрической проницаемости
Рассмотрим прямоугольную область свободного пространства, содержащую набор диэлектрических тел со сложной границей (рис.2).
Рис. 2. Общий вид рассматриваемой системы:
1 - область построения решения, 2 - диэлектрические тела.
Пусть в направлении положительных значений координат оси х распространяется импульс микроволнового излучения с известной частотой заполнения и заданной формой огибающей. Зависимость действительной и мнимой частей диэлектрической проницаемости тел от частоты считается известной. Характерные линейные размеры тел лежат в диапазоне от нескольких десятых долей длины волны до десятков длин волн падающего излучения.
Расстояния же между рассеивателями произвольны. В этих условиях необходимо определить динамику полного (т.е. падающего и рассеянного) электромагнитного поля.
Для описания нестационарной динамики электромагнитного поля воспользуемся системой уравнений Максвелла в пространственно-временном представлении:

где ![]() ,
, ![]() -
напряженность электрического и магнитного поля соответственно,
-
напряженность электрического и магнитного поля соответственно, ![]() - индукция магнитного поля. Для рассматриваемого
класса диэлектриков магнитная проницаемость с хорошей точностью равна единице,
поэтому
- индукция магнитного поля. Для рассматриваемого
класса диэлектриков магнитная проницаемость с хорошей точностью равна единице,
поэтому ![]() .
.
В (1,2)
учтена связь между векторами электрической индукции ![]() ,
напряженности электрического поля и поляризацией среды (дипольным моментом
единицы объема)
,
напряженности электрического поля и поляризацией среды (дипольным моментом
единицы объема) ![]() :
:
|
|
(3) |
Для вычисления дипольного момента единицы объема будем использовать осцилляторную микроскопическую модель среды [4], т.е. дипольный момент будет определяться отклонениями зарядов-осцилляторов от положения равновесия под действием внешней силы, а именно:
|
|
(4) |
где ![]() - количество электронов в единице объема вещества.
- количество электронов в единице объема вещества.
Уравнение движения одного осциллятора с учетом потерь имеет вид
где k -
эффективная жесткость; ![]() -
коэффициент затухания; m, e - масса и заряд электрона.
-
коэффициент затухания; m, e - масса и заряд электрона.
Совместное решение (1, 2, 4, 5) дает возможность определить динамику поля с учетом дисперсии комплексной диэлектрической проницаемости объектов, входящих в рассматриваемую систему.
Решение полученной системы уравнений будем проводить численно. Частные производные в уравнениях электромагнитного поля аппроксимируем конечными разностями. Для удобства моделирования открытых (с точки зрения излучения) границ области удобно дополнить (2) членом, содержащим ток проводимости. Тогда на границах области построения решения можно будет ввести неоднородный поглощающий слой, характеристики которого обеспечат практически полное отсутствие отражений электромагнитных волн от границ.
В
прямоугольной области для каждой из компонент электромагнитного поля введем
пространственную сетку ![]() , координаты узлов которой
удовлетворяют следующим рекуррентным соотношениям:
, координаты узлов которой
удовлетворяют следующим рекуррентным соотношениям:
для Bz компоненты
![]() .
.
![]() ,
,
для Ex компоненты
![]() ,
,
![]() ,
,
для Ey компоненты
![]() ,
,
![]() ,
,
где ![]() - шаг пространственной сетки,
- шаг пространственной сетки, ![]() ,
,![]() - количество узлов сетки по координатам
x, y соответственно. Такое взаимное
расположение сеток дает возможность использовать центрированную схему
конечно-разностной аппроксимации пространственных производных и обеспечивает
устойчивость разностной схемы.
- количество узлов сетки по координатам
x, y соответственно. Такое взаимное
расположение сеток дает возможность использовать центрированную схему
конечно-разностной аппроксимации пространственных производных и обеспечивает
устойчивость разностной схемы.
Введем
шаг по времени ![]() , величина которого
удовлетворяет условию Куранта:
, величина которого
удовлетворяет условию Куранта:
|
|
где
![]() - безразмерный
коэффициент, величина которого зависит от конкретной конфигурации проводников и
характерных частот рассматриваемых процессов.
- безразмерный
коэффициент, величина которого зависит от конкретной конфигурации проводников и
характерных частот рассматриваемых процессов.
Значения
сеточных функций компонент магнитного поля вычисляются в моменты времени ![]() ,
такие, что:
,
такие, что:
|
|
Электрическое поле определяется в моменты времени
|
|
При таком сдвиге по времени между вычислениями магнитных и электрических составляющих поля, конечно-разностная аппроксимация уравнений Максвелла имеет вид:
 ,
,
 ,
,
 .
.
Здесь верхний индекс обозначает момент времени, нижний индекс до открывающейся круглой скобки - компоненту поля, нижние индексы в круглых скобках обозначают номер узла пространственной сетки.
Величина
![]() определяется скоростью осцилляторов в
текущий момент времени
определяется скоростью осцилляторов в
текущий момент времени
|
|

Для численного интегрирования уравнения (5) удобно использовать схему "с перешагиванием".
|
|
|
|

1.3. Программа расчета импульсной переходной характеристики
Алгоритм расчета импульсной характеристики уединенного рассеивателя основан на использовании численной схемы, описанной в п.2. и состоит из следующих шагов.
1. Задание геометрической формы рассеивающего тела. Форма задается с точностью до долей длины волны падающего на тело электромагнитного поля.
2. Задание электромагнитных свойств материала тела. На данном шаге по известным экспериментальным данным о дисперсионных свойствах диэлектрической проницаемости рассматриваемого объекта выбираются параметры осцилляторов, описывающих реакцию среды на внешний электромагнитный импульс.
3. Задание характеристик зондирующего импульса микроволнового излучения, которые выбираются исходя из значений излучаемой длины волны и поляризации падающего поля. А именно, зондирующий импульс должен содержать в себе один период колебаний электромагнитного поля, его длительность должна быть короче на порядок по сравнению с периодом реально излучаемого поля. В этом случае с хорошей степенью точности можно утверждать, что воздействие на рассеиватель выбранного импульса близко к воздействию дельта-образного возмущения. Т.е. полученное в результате рассеянное поле будет близко к искомой импульсной характеристике.
4. Проведение моделирования динамики полного поля с использованием описанной в п.2. модели.
5. Выделение из общего поля рассеянного.
Шаги 4-5 повторяются для различных значений углов падения зондирующего импульса на исследуемый объект.
На рис.3 приведена блок-схема программы, реализующей предложенный выше алгоритм.
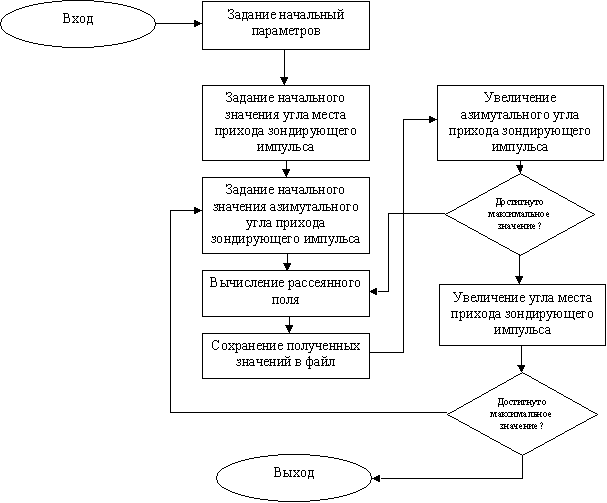
Рис.3. Блок-схема программы.
Для определения рассеянного поля используется набор точек наблюдения, которые располагаются на поверхности воображаемой сферы, центр которой совпадает с геометрическим центром рассеивающего тела. Радиус сферы должен быть много больше характерных линейных размеров рассеивателя и может составлять много длин волн.
В выбранных точках фиксируются значения компонент электромагнитного поля в каждый момент времени. По полученным временным реализациям строится импульсная характеристика, которая является функцией четырех угловых координат (центр системы координат располагается в геометрическом центре рассеивающего тела): азимутального угла и угла места прихода зондирующего импульса, азимутального угла и угла мета направления, в котором распространяется рассеянное волновое поле.
Программа имитационного моделирования рассеивания короткого электромагнитного импульса. Рассмотрим процесс формирования электромагнитного поля, возникающего в результате отражения заданного зондирующего импульса микроволнового излучения на наборе тел произвольной формы. Предположим, что импульсные характеристики рассеяния для каждого тела, включенного в набор, уже известны (например, в результате работы программы, описанной выше).
Если тела, входящие в набор, достаточно удалены друг от друга, то допустимо предположение о слабом влиянии переотражений рассеянного поля на каждом из тел рассматриваемого набора.
В этом случае суммарное волновое поле, образованное за счет однократного рассеяния зондирующего импульса на каждом из тел, и распространяющееся в заданном направлении (например, в направлении приемной антенны), вычисляется при помощи следующего алгоритма.
1. В точке расположения каждого из тел набора определяется значение падающего поля (временные зависимости компонент электромагнитного поля).
2. При помощи алгоритма быстрого преобразования Фурье вычисляется комплексный спектр падающего излучения.
3. Полученный спектр умножается на спектр импульсной характеристики для заданного направления распространения как зондирующего импульса, так и рассеянного волнового поля.
4. Используя обратное преобразование Фурье, получаем временную реализацию рассеянного поля, созданного одним объектом.
Выполнив шаги алгоритма 1-4 для каждого из тел набора, с учетом фазовых сдвигов, определяемых взаимным расположением тел, проводится суммирование временных реализаций рассеянного поля.
Если пренебречь многократными отражениями невозможно, программа имитационного моделирования использует итерационный алгоритм, основанный на процедуре, описанной ранее, а именно, в качестве первого приближения вычисляется поле однократного рассеяния. Далее проводится суммирование рассеянного поля и поля зондирующего импульса в каждой точке, соответствующей положению тел набора. Полученное в результате суммарное волновое поле выступает в качестве поля зондирующего импульса процедуры, описанной ранее. Выход из итерационной процедуры осуществляется при достижении заранее заданной точности вычисления рассеянного поля.
Таким образом, предложенный набор алгоритмов позволяет проводить предварительный анализ волновых полей широкого диапазона частот, образованных в результате рассеяния зондирующего импульса произвольной формы на наборе тел различной природы.
Примерная структура программы для имитационного моделирования на ПК. Необходимо создать программу для расчета на персональном компьютере имитации работы радара для различных погодных условий, параметров цели и моментов времени. Программа на первом этапе моделирует временной ход сигнала, регистрируемого приемником радара. На втором этапе этот сигнал анализируется и по нему делаются выводы о наличии цели и ее характеристиках. По структуре программа разделяется на пять блоков.
Блок ввода входных параметров для расчета, который сам разделяется на три части:
параметры радара: (длина волны l[мкм], длительность импульса t[нс], время между импульсами T[c], расходимость радиолуча j[мрад] или диаграмма направленности антенны G, эффективная площадь приемной антенны SA, мощность в импульсе РТ [Вт], минимальная принимаемая приемником мощность [Вт];
параметры объекта: индекс цели (1-танк, 2-орудие и т.д.), индекс фона (1-лес, 2-поле и т.д.), дальность до цели L[км], вектор скорости цели V0[м/c] и азимут f[град];
параметры атмосферы: давление Р, температура q, влажность воздуха W, модель атмосферы (М=0 – чистая, М=1 – туман, М=3 – дождь, М=4 – снегопад, М=5 – пыль, М=6 – дым), интенсивность метеоявления (в зависимости от величины М вводим: водность тумана qT [г/м3], интенсивность дождя R[мм/час], интенсивность снегопада I[мм/час], запыленность воздуха qП [г/м3], задымленность воздуха qД [г/м3].
Блок промежуточных расчетов, где рассчитываются: ЭПР цели, ЭПР фона, удельная ЭПР метеоявления (при его наличии), коэффициент ослабления радиоволн в чистой атмосфере, коэффициент ослабления радиоволн в замутненной атмосфере.
Здесь используются соответствующие банки данных и инженерные алгоритмы расчетов требуемых величин.
Блок основного расчета, где в цикле по времени находится принимаемая радаром мощность при реализации всех входных параметров, а также рассчитывается отношение сигнал/шум (о.с.ш.). При желании на экран монитора выводится, например, график, показывающий величину (о.с.ш.) в зависимости от времени, прошедшего с момента излучения импульса. Параметры шумового сигнала можно варьировать.
Блок анализа, где делается обработка результатов основного расчета с целью нахождения параметров цели и ее распознавания. Определяется (о.с.ш.), обеспечивающее обнаружение с заданной вероятностью при заданном уровне ложных тревог. Оцениваются вероятностные критерии полученной информации.
Блок вывода результатов расчета.
По окончании расчета выдается запрос на повтор вычислений с изменением входных параметров.
2. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ВАРИАНТОВ ПОСТРОЕНИЯ УСТРОЙСТВ ПЕРВИЧНОЙ ОБРАБОТКИ В РЛС ТЕРАГЕРЦОВОГО ДИАПАЗОНА
Компьютерная модель позволяет рассчитывать величину отношения принимаемой мощности к мощности импульсного передатчика на выбранных длинах волн в исследуемом диапазоне в зависимости от дальности до цели и различных метеорологических условиях, а также путем корреляционного анализа принимаемого и излученного импульсов находить дальность до цели. В первоначальном проекте предполагалось задавать различный вид излучаемого импульса и различные методы первичной обработки информации, а также движение цели. Но из-за приостановки финансирования эти варианты в программе реализованы не были, хотя при задании входных параметров эти возможности упоминаются.
В данной реализации программы математического моделирования расчет проводится по стандартной формуле радиолокации. Параметры атмосферы задаются следующим образом. Пользователь может выбрать один из сезонов года (определяя тем самым поглощение радиоволн в газах атмосферы) с добавлением (при желании) различных осадков или аэрозолей с разной интенсивностью. Данные о молекулярном поглощении приняты для г. Дубна Московской области. Наличие на трассе РЛС, например, дождя создает распределенную ложную цель, параметры которой также рассчитываются. Делается описание самой программы и инструкций для пользователя.
Программа имитационного моделирования (ПИМ) предназначена для проведения расчетов интенсивности (мощности) принятого радиолокационным комплексом сигнала при заданных характеристиках: излучаемого импульса; передающего тракта; излучающей антенны; трассы распространения сигнала, включая метеоявления и сезонность; импульса, отраженного от цели, включая подстилающую поверхность; приемной антенны; приемного тракта; приемника [1]. Также ПИМ выполняет корреляционный анализ огибающей принятого сигнала.
2.1. Общая структура программы
ПИМ состоит из трех основных блоков (рис.4): блок задания параметров; вычислительный блок; интерфейс пользователя.
Первый блок предназначен для формирования полного списка параметров, необходимых для проведения имитационного моделирования. Эти параметры описывают характеристики генератора, передающего тракта, излучающей антенны, открытой трассы, цели, приемной антенны, приемного тракта, собственно приемника.
Вычислительный блок обеспечивает расчет интенсивности электромагнитного поля, формируемого излучающей антенной с учетом ее диаграммы направленности, в окружающем пространстве. Здесь же проводится вычисление поля, отраженного от цели, от осадков и от подстилающей поверхности. Временная зависимость интенсивности принятого сигнала используется для проведения корреляционной обработки.
Третий блок обеспечивает взаимодействие пользователя с ПИМ, обрабатывает задаваемые им команды и пр.
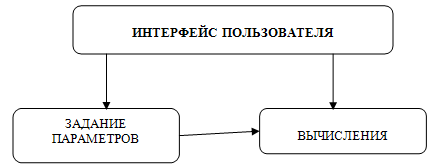
Рис.4. Основные блоки
программы и их взаимодействие
2.2. Программная реализация
При разработке ПИМ был использован объектно-ориентированный подход с учетом требований возможной межплатформенной переносимости исполняемого кода. В связи с этим было принято решение об использовании технологии «.NET».
Приложение написано на языке программирования C# и содержит набор модулей, список и функциональное назначение которых приведены в табл. 1.
Таблица 1. Список основных модулей ПИМ
|
№№ п/п |
Название |
Размер (кБайт) |
Назначение |
|
1 |
Program.cs |
21 |
Содержит основной цикл приложения, класс описания глобальных переменных, общие процедуры обработки параметров и данных |
|
2 |
main_frame.cs |
22 |
Основное окно интерфейса пользователя. Содержит панель задания параметров и панель вычислений |
|
3 |
main_frame.Designer.cs |
63 |
Содержит описание примитивов, использованных в main_frame.cs |
|
4 |
param_emm_form.cs |
7 |
Диалоговое окно задания параметров передатчика |
|
5 |
param_emm_form.Designer.cs |
13 |
Содержит описание примитивов, использованных в param_emm_form.cs |
|
6 |
param_emm_trakt_form.cs |
6 |
Диалоговое окно задания параметров передающего тракта |
|
7 |
param_emm_trakt_form.Designer.cs |
10 |
Содержит описание примитивов, использованных в param_emm_trakt_form.cs |
|
8 |
param_emm_ant_form.cs |
7 |
Диалоговое окно задания параметров передающей антенны |
|
9 |
param_emm_ant_form.Designer.cs |
15 |
Содержит описание примитивов, использованных в param_emm_ant_form.cs |
|
10 |
param_recv_form.cs |
6 |
Диалоговое окно задания параметров приемника |
|
11 |
param_recv_form.Designer.cs |
11 |
Содержит описание примитивов, использованных в param_recv_form.cs |
|
12 |
param_recv_trakt_form.cs |
6 |
Диалоговое окно задания параметров приемного тракта |
|
13 |
param_recv_trakt_form.Designer.cs |
10 |
Содержит описание примитивов, использованных в param_recv_trakt_form.cs |
|
14 |
param_recv_ant_form.cs |
7 |
Диалоговое окно задания параметров приемной антенны |
|
15 |
param_recv_ant_form.Designer.cs |
15 |
Содержит описание примитивов, использованных в param_recv_ant_form.cs |
|
16 |
param_trassa_form.cs |
6 |
Диалоговое окно задания параметров трассы распространения сигнала |
|
17 |
param_trassa_form.Designer.cs |
21 |
Содержит описание примитивов, использованных в param_trassa_form.cs |
|
18 |
param_target_form.cs |
6 |
Диалоговое окно задания параметров цели |
|
19 |
param_target_form.Designer.cs |
18 |
Содержит описание примитивов, использованных в param_target_form.cs |
|
20 |
calc.cs |
9 |
Содержит функции обработки принятого сигнала |
|
21 |
param_procs_form.cs |
2 |
Диалоговое окно задания параметров обработки принятого сигнала |
|
22 |
param_procs_form.Designer.cs |
6 |
Содержит описание примитивов, использованных в param_procs_form.cs |
Описание интерфейса пользователя приведено в [1]. Там же приводится и примерный порядок работы пользователя.
3. АЛГОРИТМЫ ОПТИМАЛЬНОЙ ОБРАБОТКИ СИГНАЛОВ РЛС ТЕРАГЕРЦОВОГО ДИАПАЗОНА ДЛЯ РЕШЕНИЯ ЗАДАЧ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ (СЕЛЕКЦИИ) ОБЪЕКТОВ ТЕХНИКИ
Так как предполагается, что благодаря особенностям ТГц диапазона радиочастот радиолокационной (РЛ) системы она способна строить радиоизображения объектов, находящихся в заданной области пространства, то технически наиболее целесообразно получать их путем сканирования этой области с помощью узкой диаграммы направленности. В результате сканирования вся исследуемая область разбивается на отдельные угловые элементы разрешения. Анализируя колебание, приходящее от каждого такого элемента, приемник РЛ системы должен принять решение о том есть ли в нем сигнал, отраженный от цели, или его нет. В случае обнаружения цели ей приписываются угловые координаты, соответствующие положению того элемента разрешения, для которого было принято это решение, а также измеряются ее дальность и, возможно, скорость. При этом если угловые размеры цели меньше соответствующих размеров элемента разрешения, то цель считается сосредоточенной. Если же обнаруживаемый объект занимает несколько угловых элементов разрешения, то можно говорить о протяженной цели. В последнем случае появляется возможность определения ее формы и размеров. Таким образом, одним из центральных моментов при разработке РЛ системы является нахождение алгоритмов обработки РЛ сигналов, позволяющих обнаруживать и измерять координаты и параметры движения цели.
Так как только небольшая часть энергии зондирующего сигнала, отразившегося от цели, достигает приемного устройства РЛС, то процесс РЛ наблюдения должен рассматриваться с учетом шумов, которые всегда сопровождают сигнал и которые представляют собой реализации тех или иных случайных процессов. Отсюда следует, что теория синтеза систем РЛ наблюдения должна, по необходимости, опираться на известные положения математической статистики, то есть являться статистической теорией. В настоящее время существует достаточно развитая статистическая теория синтеза систем РЛ наблюдений, позволяющая находить алгоритмы обработки радиолокационных сигналов оптимальные с точки зрения выбранных критериев качества их работы [5-12].
Для решения задачи синтеза оптимальных систем обнаружения и измерения должны быть заданы: 1) вид зондирующего сигнала и соответствующее выражение для сигнала, отраженного от цели; 2) вероятностные характеристики помех (шумов), сопровождающих прием полезного сигнала; 3) критерии качества работы РЛ системы в режимах обнаружения и измерения. Кратко рассмотрим каждый из этих пунктов.
Зондирующий сигнал ![]() представляет собой узкополосный сигнал,
модулированный, в общем случае, как по амплитуде, так и по фазе (частоте),
который может быть записан в следующем виде:
представляет собой узкополосный сигнал,
модулированный, в общем случае, как по амплитуде, так и по фазе (частоте),
который может быть записан в следующем виде:
|
(6) |
где  –
несущая частота зондирующего сигнала;
–
несущая частота зондирующего сигнала; ![]() и
и ![]() – известные функции, описывающие
возможные амплитудную и фазовую (частотную) модуляции, соответственно.
– известные функции, описывающие
возможные амплитудную и фазовую (частотную) модуляции, соответственно.
|
(7) |
где ![]() –
комплексная огибающая сигнала.
–
комплексная огибающая сигнала.
Колебание ![]() , поступающее на вход радиоприемного
устройства, в общем случае можно представить в виде аддитивной смеси
отраженного от цели сигнала
, поступающее на вход радиоприемного
устройства, в общем случае можно представить в виде аддитивной смеси
отраженного от цели сигнала ![]() (если он присутствует)
и помехи (шума)
(если он присутствует)
и помехи (шума) ![]() :
: ![]() . Вид
отраженного сигнала
. Вид
отраженного сигнала ![]() зависит как от конкретного вида
зондирующего сигнала (6), так и от отражательных (рассеивающих) свойств цели.
Кроме того, сигнал
зависит как от конкретного вида
зондирующего сигнала (6), так и от отражательных (рассеивающих) свойств цели.
Кроме того, сигнал ![]() содержит полезную информацию о
дальности и скорости движения цели, которая закодирована значениями таких его
параметров, как время задержки
содержит полезную информацию о
дальности и скорости движения цели, которая закодирована значениями таких его
параметров, как время задержки ![]() и доплеровский сдвиг
частоты
и доплеровский сдвиг
частоты ![]() .
.
К аддитивным помехам ![]() в первую очередь относятся всегда
присутствующие внутренние шумы приемника, пересчитанные на его вход. Кроме
того, к аддитивным помехам относятся тепловые и космические шумы, принимаемые
антенной, различные мешающие сигналы, как, например, активные помехи и так
далее.
в первую очередь относятся всегда
присутствующие внутренние шумы приемника, пересчитанные на его вход. Кроме
того, к аддитивным помехам относятся тепловые и космические шумы, принимаемые
антенной, различные мешающие сигналы, как, например, активные помехи и так
далее.
Аддитивные помехи обычно
представляют собой нормальный случайный процесс с нулевым математическим
ожиданием и известной корреляционной функцией ![]() .
Внутренние шумы приемника и некоторые другие виды помех можно аппроксимировать
белым шумом
.
Внутренние шумы приемника и некоторые другие виды помех можно аппроксимировать
белым шумом
|
(8) |
где ![]() –
спектральная интенсивность помехи;
–
спектральная интенсивность помехи; ![]() – импульсная функция
Дирака.
– импульсная функция
Дирака.
В простейшем случае
задача обнаружения р/л сигнала формулируется следующим образом. Пусть на
интервале времени наблюдения ![]() на вход приемника
поступает колебание
на вход приемника
поступает колебание ![]() , которое в одном случае может
представлять собой сумму сигнала, отраженного от цели и помехи:
, которое в одном случае может
представлять собой сумму сигнала, отраженного от цели и помехи: ![]() , а в другом – одну лишь помеху (шум):
, а в другом – одну лишь помеху (шум): ![]() . Проанализировав колебание
. Проанализировав колебание ![]() , приемник должен сформировать на своем
выходе решение о том, какая из вышеописанных ситуаций имела место, то есть
выбрать одну из альтернатив. Так как прием полезного сигнала всегда
сопровождается помехой (шумом), то при любом выбранном нами правиле принятия
решений будут допускаться ошибки. В данном случае такими ошибками будут: 1)
пропуск сигнала, то есть решение о том, что в реализации колебания на входе
приемника сигнала нет, хотя в действительности сигнал присутствовал и 2) ложная
тревога, то есть решение о том, что на вход приемника поступил отраженный от
цели сигнал, хотя в действительности он отсутствовал. Естественное стремление
разработчиков РЛ систем обнаружения – построить обнаружитель с минимально
возможными ошибками пропуска цели и ложной тревоги. Наиболее часто при
проектировании РЛ систем используется т.н. критерий Неймана-Пирсона, который
заключается в том, чтобы обнаружитель обеспечивал максимальную вероятность
правильного обнаружения (минимальную вероятность пропуска цели) при условии,
чтобы вероятность ложной тревоги не превышала бы заданной величины.
, приемник должен сформировать на своем
выходе решение о том, какая из вышеописанных ситуаций имела место, то есть
выбрать одну из альтернатив. Так как прием полезного сигнала всегда
сопровождается помехой (шумом), то при любом выбранном нами правиле принятия
решений будут допускаться ошибки. В данном случае такими ошибками будут: 1)
пропуск сигнала, то есть решение о том, что в реализации колебания на входе
приемника сигнала нет, хотя в действительности сигнал присутствовал и 2) ложная
тревога, то есть решение о том, что на вход приемника поступил отраженный от
цели сигнал, хотя в действительности он отсутствовал. Естественное стремление
разработчиков РЛ систем обнаружения – построить обнаружитель с минимально
возможными ошибками пропуска цели и ложной тревоги. Наиболее часто при
проектировании РЛ систем используется т.н. критерий Неймана-Пирсона, который
заключается в том, чтобы обнаружитель обеспечивал максимальную вероятность
правильного обнаружения (минимальную вероятность пропуска цели) при условии,
чтобы вероятность ложной тревоги не превышала бы заданной величины.
В общем
случае, для решения задачи оптимального обнаружения р/л сигнала и измерения его
полезных параметров (времени задержки и доплеровского сдвига) по данной
реализации ![]() нужны две оптимальные системы. Первая
система должна давать оптимальное решение задачи обнаружения (без измерения
параметров), а вторая – оптимальное измерение параметров (без обнаружения). При
этом данные второй системы учитываются лишь в тех случаях, когда первая система
с достаточной надежностью устанавливает наличие сигнала. (Часть блоков обоих
систем может быть общими, но выходные блоки должны быть раздельными). Однако
при высоких требованиях к надежности обнаружения (а без высокой надежности
обнаружения не может быть и высокой надежности измерения параметров) одновременное
обнаружение и измерение параметров требует для обеспечения той же надежности
обнаружения лишь незначительно большей энергии сигнала, чем обнаружение без
измерения параметров [13]. Поэтому, при высоких требованиях к надежности
обнаружения и измерения полезных параметров сигнала, создавать отдельную
систему для оптимального обнаружения (без измерения) нецелесообразно. Исходя из
вышеизложенного, мы будем в первую очередь рассматривать алгоритмы, реализующие
процедуры совместного обнаружения-измерения, как наиболее адекватные
рассматриваемым системам.
нужны две оптимальные системы. Первая
система должна давать оптимальное решение задачи обнаружения (без измерения
параметров), а вторая – оптимальное измерение параметров (без обнаружения). При
этом данные второй системы учитываются лишь в тех случаях, когда первая система
с достаточной надежностью устанавливает наличие сигнала. (Часть блоков обоих
систем может быть общими, но выходные блоки должны быть раздельными). Однако
при высоких требованиях к надежности обнаружения (а без высокой надежности
обнаружения не может быть и высокой надежности измерения параметров) одновременное
обнаружение и измерение параметров требует для обеспечения той же надежности
обнаружения лишь незначительно большей энергии сигнала, чем обнаружение без
измерения параметров [13]. Поэтому, при высоких требованиях к надежности
обнаружения и измерения полезных параметров сигнала, создавать отдельную
систему для оптимального обнаружения (без измерения) нецелесообразно. Исходя из
вышеизложенного, мы будем в первую очередь рассматривать алгоритмы, реализующие
процедуры совместного обнаружения-измерения, как наиболее адекватные
рассматриваемым системам.
3.1. Оптимальная обработка радиолокационных сигналов, отраженных от медленно флуктуирующих точечных объектов
|
(9) |
где ![]() –
неизвестный амплитудный множитель, учитывающий ослабление зондирующего сигнала
как при его прохождении до цели и обратно, так и рассеивающие свойства цели;
–
неизвестный амплитудный множитель, учитывающий ослабление зондирующего сигнала
как при его прохождении до цели и обратно, так и рассеивающие свойства цели; ![]() – неизвестный дополнительный фазовый
сдвиг, обусловленный отражением сигнала (6) от цели;
– неизвестный дополнительный фазовый
сдвиг, обусловленный отражением сигнала (6) от цели; ![]() –
задержка сигнала, отраженного от цели, находящейся на расстоянии
–
задержка сигнала, отраженного от цели, находящейся на расстоянии ![]() ;
; ![]() –
доплеровский сдвиг частоты, вызванный движением цели с радиальной скоростью
–
доплеровский сдвиг частоты, вызванный движением цели с радиальной скоростью ![]() и
и ![]() . Для
дальнейшего рассмотрения удобно записать выражение для сигнала (9) в следующей,
неявной форме, выделив в нем только неизвестные параметры
. Для
дальнейшего рассмотрения удобно записать выражение для сигнала (9) в следующей,
неявной форме, выделив в нем только неизвестные параметры
|
(10) |
Здесь ![]() известная функция времени, зависящая от
неизвестных параметров
известная функция времени, зависящая от
неизвестных параметров ![]() и
и ![]() , где
, где ![]() – полезные (существенные, измеряемые)
параметры,
– полезные (существенные, измеряемые)
параметры, ![]() – мешающие (несущественные, не
измеряемые) параметры сигнала и
– мешающие (несущественные, не
измеряемые) параметры сигнала и ![]() – комплексная
огибающая принимаемого сигнала. Обычно полагают, что начальная фаза
– комплексная
огибающая принимаемого сигнала. Обычно полагают, что начальная фаза ![]() и амплитудный множитель
и амплитудный множитель ![]() являются независимыми, случайными
величинами, причем
являются независимыми, случайными
величинами, причем ![]() распределено равномерно
распределено равномерно
|
(11) |
а ![]() – по
закону Релея
– по
закону Релея
|
(12) |
где ![]() –
дисперсия.
–
дисперсия.
Рассмотрим вначале
идеальный случай, когда сигнал (10) известен точно, то есть известны значения
всех его параметров, как полезных ![]() так и мешающих
так и мешающих ![]() , но неизвестен лишь факт наличия или
отсутствия полезного сигнала. При этом, в неявном выражении для принимаемого
сигнала (10), оставим лишь явную зависимость от полезных параметров
, но неизвестен лишь факт наличия или
отсутствия полезного сигнала. При этом, в неявном выражении для принимаемого
сигнала (10), оставим лишь явную зависимость от полезных параметров ![]() , опустив в нем соответствующее
обозначение для мешающих параметров
, опустив в нем соответствующее
обозначение для мешающих параметров ![]() . Если теперь
предположить, что прием сигнала
. Если теперь
предположить, что прием сигнала ![]() проводится на фоне
аддитивной помехи
проводится на фоне
аддитивной помехи ![]() с известной корреляционной функцией
с известной корреляционной функцией
![]() , то, как следует из статистической теории
синтеза оптимальных систем р/л наблюдения [10], в качестве выходного эффекта
оптимального приемника можно принять значение так называемого корреляционного
интеграла
, то, как следует из статистической теории
синтеза оптимальных систем р/л наблюдения [10], в качестве выходного эффекта
оптимального приемника можно принять значение так называемого корреляционного
интеграла
|
|
(13) |
Функцию ![]() (а также любую другую функцию,
отличающуюся на постоянный коэффициент) называют оптимальным опорным сигналом
системы обработки. Опорный сигнал
(а также любую другую функцию,
отличающуюся на постоянный коэффициент) называют оптимальным опорным сигналом
системы обработки. Опорный сигнал ![]() находят как решение
следующего интегрального уравнения
находят как решение
следующего интегрального уравнения
|
|
(14) |
|
|
(15) |
|
|
|
Таким образом, при
полностью детерминированном сигнале в качестве оптимального выходного эффекта ![]() можно принять корреляционный интеграл
можно принять корреляционный интеграл
|
(16) |
или любой информационный эквивалент
(16). Принимая во внимание, что функция ![]() вне
интервала
вне
интервала ![]() тождественно равна нулю, интегрирование в
корреляционных интегралах здесь и в дальнейшем распространено на бесконечные
пределы. Корреляционный интеграл определяет те существенные операции, которые
нужно выполнить над функцией
тождественно равна нулю, интегрирование в
корреляционных интегралах здесь и в дальнейшем распространено на бесконечные
пределы. Корреляционный интеграл определяет те существенные операции, которые
нужно выполнить над функцией ![]() , чтобы извлечь из нее
всю доступную информацию о сигнале
, чтобы извлечь из нее
всю доступную информацию о сигнале ![]() . Поэтому говорят еще,
что значение
. Поэтому говорят еще,
что значение ![]() представляет собой достаточную статистику
или выходной эффект достаточного приемника.
представляет собой достаточную статистику
или выходной эффект достаточного приемника.
Если теперь считать, что полезные параметры ![]() неизвестны и подлежат измерению, то
необходимо рассматривать (11), как функцию от этих параметров. Воспроизведение
функции
неизвестны и подлежат измерению, то
необходимо рассматривать (11), как функцию от этих параметров. Воспроизведение
функции ![]() на
всем априорном интервале
на
всем априорном интервале ![]() технически
трудно реализуемо. Исключение составляет время задержки сигнала или величина
линейно связанная с временем задержки. Во всех других случаях воспроизводится
не непрерывная функция
технически
трудно реализуемо. Исключение составляет время задержки сигнала или величина
линейно связанная с временем задержки. Во всех других случаях воспроизводится
не непрерывная функция ![]() , а совокупность ее дискретных значений
, а совокупность ее дискретных значений ![]() на
интервале
на
интервале ![]() .
Система оптимального одновременного обнаружения и измерения полезных параметров
строится при этом по многоканальной схеме, как это показано на рис. 5.
.
Система оптимального одновременного обнаружения и измерения полезных параметров
строится при этом по многоканальной схеме, как это показано на рис. 5.
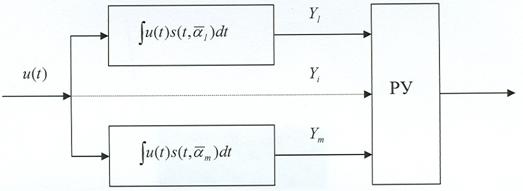
Рис. 5. Многоканальная схема оптимальной обработки.
В
каждом канале над принимаемым колебанием ![]() осуществляется
линейная операция – формирование корреляционного интеграла (16) при
фиксированном значении параметра
осуществляется
линейная операция – формирование корреляционного интеграла (16) при
фиксированном значении параметра ![]() . Выходные эффекты
. Выходные эффекты ![]() всех каналов подводятся к решающему
устройству РУ. Решающее устройство определяет наибольшее значение
всех каналов подводятся к решающему
устройству РУ. Решающее устройство определяет наибольшее значение ![]() и сравнивает его с порогом
и сравнивает его с порогом ![]() , выбираемым в соответствии с допустимой
вероятностью ложной тревоги
, выбираемым в соответствии с допустимой
вероятностью ложной тревоги ![]() . Если оказывается, что
. Если оказывается, что
![]() , то принимается решение об отсутствии
сигнала; если же
, то принимается решение об отсутствии
сигнала; если же ![]() , то принимается решение о том,
что сигнал на входе есть и что
, то принимается решение о том,
что сигнал на входе есть и что ![]() является искомым
значением измеряемого параметра
является искомым
значением измеряемого параметра ![]() .
.
Число
![]() дискретных значений параметра
дискретных значений параметра ![]() или число независимых каналов обработки
определяется, как это будет показано в дальнейшем, конкретным видом сигнала и
длиной априорного интервала
или число независимых каналов обработки
определяется, как это будет показано в дальнейшем, конкретным видом сигнала и
длиной априорного интервала ![]() . Общим соображением
является то, что выборка дискретных значений
. Общим соображением
является то, что выборка дискретных значений ![]() должна
с точностью, достаточной для практически оптимального принятия решения,
воспроизводить функцию
должна
с точностью, достаточной для практически оптимального принятия решения,
воспроизводить функцию ![]() на всем интервале возможных
значений
на всем интервале возможных
значений ![]() .
.
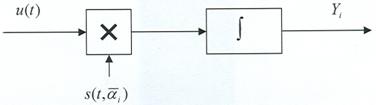
Рис.6. Схема корреляционного канала обработки.
Схема состоит из
устройства, производящего умножение принятого колебания на опорное колебание ![]() , совпадающее по форме с ожидаемым
сигналом, и из устройства, осуществляющего интегрирование произведения. При
втором методе приема (рис. 7) основным элементом является оптимальный линейный
фильтр ОФ с импульсной характеристикой (то есть реакцией на входное воздействие
, совпадающее по форме с ожидаемым
сигналом, и из устройства, осуществляющего интегрирование произведения. При
втором методе приема (рис. 7) основным элементом является оптимальный линейный
фильтр ОФ с импульсной характеристикой (то есть реакцией на входное воздействие
![]() )
)
|
(17) |
которая представляет
собой зеркальное отражение сигнала ![]() относительно оси
относительно оси ![]() , сдвинутое на
, сдвинутое на ![]() .
.
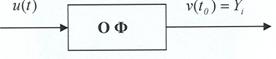
Рис. 7. Схема формирования корреляционного интеграла методом оптимальной фильтрации.
Коэффициент ![]() учитывает
возможность выбора произвольного усиления. Временной сдвиг
учитывает
возможность выбора произвольного усиления. Временной сдвиг ![]() также в значительной мере произволен.
Единственное ограничение, которое накладывается на него – это условие
физической реализуемости фильтра
также в значительной мере произволен.
Единственное ограничение, которое накладывается на него – это условие
физической реализуемости фильтра
|
|
|
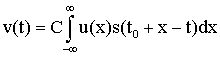
Если на вход оптимального
фильтра поступает колебание ![]() , то выходной эффект
, то выходной эффект
|
|
(18) |

в момент времени ![]() представляет собой значение
корреляционного интеграла
представляет собой значение
корреляционного интеграла ![]() . В тех случаях, когда
полезным параметром является время задержки
. В тех случаях, когда
полезным параметром является время задержки ![]() , выходной
эффект оптимального фильтра
, выходной
эффект оптимального фильтра
|
|
(19) |
на интервале ![]() воспроизводит
корреляционный интеграл
воспроизводит
корреляционный интеграл ![]() для всех значений
временных задержек интервала
для всех значений
временных задержек интервала ![]() . Метод оптимальной
фильтрации, следовательно, в случае, когда измеряемый параметр закодирован во
временной задержке сигнала, обеспечивает формирование непрерывного выходного
эффекта с использованием вместо многоканальной схемы одного канала приема.
. Метод оптимальной
фильтрации, следовательно, в случае, когда измеряемый параметр закодирован во
временной задержке сигнала, обеспечивает формирование непрерывного выходного
эффекта с использованием вместо многоканальной схемы одного канала приема.
Преимуществом
корреляторов является их гибкость, возможность быстрого перехода к различным
формам сигналов. Для этого достаточно изменить функцию ![]() ,
подаваемую на один из входов умножителя. Оптимальный же фильтр согласован
только с сигналом определенной формы и требуется существенно изменить схему
фильтра, чтобы согласовать его с другим сигналом.
,
подаваемую на один из входов умножителя. Оптимальный же фильтр согласован
только с сигналом определенной формы и требуется существенно изменить схему
фильтра, чтобы согласовать его с другим сигналом.
При практической
реализации оптимального приемника, часто бывает более удобным комбинированный
способ вычисления корреляционного интеграла (16), при котором используется как
непосредственное перемножение напряжений, так и фильтрация полученного при этом
колебания. Такая возможность следует из выражения (16), если представить
опорный сигнал ![]() в виде произведения двух
колебаний:
в виде произведения двух
колебаний: ![]() . Тогда операцию вычисления
корреляционного интеграла (11) можно свести к умножению входного колебания
. Тогда операцию вычисления
корреляционного интеграла (11) можно свести к умножению входного колебания ![]() на функцию
на функцию ![]() и
интегрирование полученного произведения с помощью фильтра, согласованного с
сигналом
и
интегрирование полученного произведения с помощью фильтра, согласованного с
сигналом ![]() . Приемник, построенный по такому
принципу, называется корреляционно-фильтровым.
. Приемник, построенный по такому
принципу, называется корреляционно-фильтровым.
До этого рассматривался
случай, когда мешающие параметры сигнала ![]() и
и ![]() известны точно. Однако этот случай
никогда не реализуется при РЛ наблюдении. Поэтому наличие неизвестных мешающих
параметров
известны точно. Однако этот случай
никогда не реализуется при РЛ наблюдении. Поэтому наличие неизвестных мешающих
параметров ![]() делает приведенное выше выражение для оптимальной
обработки (11) принимаемого р/л сигнала непригодным для практической реализации.
Вместе с тем, теория оптимальных методов приема р/л сигналов позволяет синтезировать
алгоритмы обработки РЛ сигналов с учетом наличия в них неизвестных мешающих параметров
делает приведенное выше выражение для оптимальной
обработки (11) принимаемого р/л сигнала непригодным для практической реализации.
Вместе с тем, теория оптимальных методов приема р/л сигналов позволяет синтезировать
алгоритмы обработки РЛ сигналов с учетом наличия в них неизвестных мешающих параметров
![]() . Так, если несущественные параметры
. Так, если несущественные параметры ![]() и
и ![]() принимаемого
сигнала считать случайными, независимыми величинами, распределенными согласно
(11) и (12) соответственно, а прием осуществляется на фоне внутреннего
флуктуационного шума приемника (8), то в качестве выходного эффекта
оптимального (достаточного) приемника может быть принято модульное значение
принимаемого
сигнала считать случайными, независимыми величинами, распределенными согласно
(11) и (12) соответственно, а прием осуществляется на фоне внутреннего
флуктуационного шума приемника (8), то в качестве выходного эффекта
оптимального (достаточного) приемника может быть принято модульное значение ![]() комплексного корреляционного интеграла
комплексного корреляционного интеграла ![]()
|
(20) |

где ![]() функция,
комплексно сопряженная огибающей сигнала (10), а
функция,
комплексно сопряженная огибающей сигнала (10), а ![]() комплексная
огибающая входного процесса.
комплексная
огибающая входного процесса.
Таким образом при приеме
сигналов с неизвестными амплитудным множителем ![]() и
начальной фазой
и
начальной фазой ![]() функция
функция ![]() играет
роль, аналогичную
играет
роль, аналогичную ![]() (16) при приеме полностью
известного сигнала. Снова, как и в случае приема известного сигнала, возможны
два способа реализации модульного значения комплексного корреляционного
интеграла (20): корреляционный и фильтровой.
(16) при приеме полностью
известного сигнала. Снова, как и в случае приема известного сигнала, возможны
два способа реализации модульного значения комплексного корреляционного
интеграла (20): корреляционный и фильтровой.
На рис. 8 представлена
схема оптимальной корреляционной обработки сигналов со случайной амплитудой и
начальной фазой. Схема состоит из двух квадратурных каналов, формирующих
корреляционные интегралы ![]() и
и ![]() . В качестве опорных колебаний
используются колебания
. В качестве опорных колебаний
используются колебания ![]() и
и ![]() , где
, где ![]() – сигнал, содержащий два параметра:
измеряемый
– сигнал, содержащий два параметра:
измеряемый ![]() и не измеряемый – начальную фазу
и не измеряемый – начальную фазу ![]() ;
; ![]() –
функция, сопряженная (фактически квадратурная, то есть сдвинутая по фазе на 900)
по отношению к
–
функция, сопряженная (фактически квадратурная, то есть сдвинутая по фазе на 900)
по отношению к ![]() . Начальная фаза
. Начальная фаза ![]() опорных колебаний может быть выбрана
произвольной. Выходы обоих каналов подводятся к устройству, осуществляющему
операцию
опорных колебаний может быть выбрана
произвольной. Выходы обоих каналов подводятся к устройству, осуществляющему
операцию ![]() .
.
На рис. 9 показан
фильтровой метод формирования модульного значения корреляционного интеграла
(20), который сводится к пропусканию принятого колебания ![]() через оптимальный фильтр с импульсной
реакцией (17), за которым следует линейный амплитудный детектор Д,
осуществляющий операцию получения огибающей подводимого к его входу колебания.
Начальная фаза импульсной характеристики (17), так же как и опорного колебания
через оптимальный фильтр с импульсной
реакцией (17), за которым следует линейный амплитудный детектор Д,
осуществляющий операцию получения огибающей подводимого к его входу колебания.
Начальная фаза импульсной характеристики (17), так же как и опорного колебания ![]() в схеме на рис. 9, произвольная.
в схеме на рис. 9, произвольная.
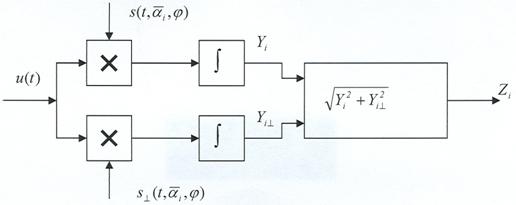
Рис. 8. Схема оптимального корреляционного канала обработки сигналов со случайной начальной фазой

Рис. 9. Схема обработки сигналов со случайной начальной фазой методом оптимальной фильтрации.
В момент времени ![]() на выходе системы (рис. 9) формируется
оптимальный выходной эффект. Если измеряемый параметр закодирован во временной
задержке сигнала, одноканальная система на рис. 9 опять будет воспроизводить
непрерывный выходной эффект
на выходе системы (рис. 9) формируется
оптимальный выходной эффект. Если измеряемый параметр закодирован во временной
задержке сигнала, одноканальная система на рис. 9 опять будет воспроизводить
непрерывный выходной эффект ![]() на всем множестве
возможных значений измеряемого параметра
на всем множестве
возможных значений измеряемого параметра ![]() . Необходимость
в многоканальной схеме при этом отпадает.
. Необходимость
в многоканальной схеме при этом отпадает.
Тот факт, что в формулы
для оптимальной обработки (16) и (20) входит выражение для полезного сигнала,
дает основание полагать, что качество принимаемых решений во многом зависит от
выбора зондирующего сигнала. И теория подтверждает это предположение. Так,
большую роль в ней играет так называемая корреляционная функция сигнала или
функция неопределенности ![]() [9]:
[9]:
|
(21) |
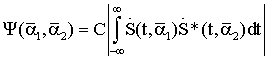
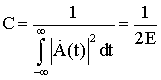
где ![]() –
множитель, выбираемый из условия нормировки:
–
множитель, выбираемый из условия нормировки: ![]() .
.
Из (21) следует, что
функция неопределенности характеризует связь между комплексными огибающими,
соответствующие двум различным комбинациям измеряемых параметров ![]() и
и ![]() .
.
|
(22) |
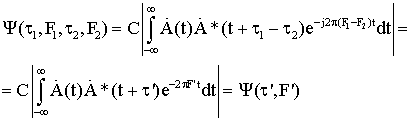
и ![]() – энергия сигнала.
– энергия сигнала.
Из (22) следует, что
функция неопределенности зависит не от самих значений ![]() ,
а только от их разностей:
,
а только от их разностей: ![]() и
и ![]() .
.
На плоскости ![]() эта функция образует поверхность, вершина
которой (максимум) расположена в начале координат и равна единице, так как
всегда
эта функция образует поверхность, вершина
которой (максимум) расположена в начале координат и равна единице, так как
всегда ![]() . По мере увеличения
. По мере увеличения ![]() и
и ![]() функция
функция
![]() уменьшается монотонно или не монотонно, в
зависимости от вида сигнала (5). В последнем случае поверхность
уменьшается монотонно или не монотонно, в
зависимости от вида сигнала (5). В последнем случае поверхность ![]() имеет, кроме центральной вершины, еще
дополнительные вершины меньшей величины. Однако при любом виде сигнала полный
объем, образуемый поверхностью
имеет, кроме центральной вершины, еще
дополнительные вершины меньшей величины. Однако при любом виде сигнала полный
объем, образуемый поверхностью ![]() с плоскостью
с плоскостью ![]() , оказывается одинаковым и равным единице,
то есть всегда
, оказывается одинаковым и равным единице,
то есть всегда
|
(23) |
Теоретическое
рассмотрение вопроса одновременной оценки доплеровской частоты и запаздывания
сигнала показывает [10], что их измерение сводится к нахождению на фоне
выходных помех точки, в которой функция неопределенности достигает своего
наибольшего значения. Поэтому точность оценок ![]() и
и ![]() при прочих равных условиях будет тем
выше, чем резче выражен максимум функции неопределенности, то есть чем острее и
уже выброс функции
при прочих равных условиях будет тем
выше, чем резче выражен максимум функции неопределенности, то есть чем острее и
уже выброс функции ![]() в окрестности нуля.
в окрестности нуля.
При решении вопроса о
том, какой вид функции ![]() (а следовательно и зондирующего
сигнала) является наилучшим, помимо высокой точности измерения параметров
(а следовательно и зондирующего
сигнала) является наилучшим, помимо высокой точности измерения параметров ![]() и
и ![]() приходится
учитывать также возможную неоднозначность измерений и разрешающую способность
системы. Очевидно, что разрешающая способность, также как и точность измерения,
получается тем выше, чем уже выброс функции
приходится
учитывать также возможную неоднозначность измерений и разрешающую способность
системы. Очевидно, что разрешающая способность, также как и точность измерения,
получается тем выше, чем уже выброс функции ![]() в
окрестности нуля. Однако существенное значение имеет вид функции
неопределенности и вне этой области. Так функция неопределенности
в
окрестности нуля. Однако существенное значение имеет вид функции
неопределенности и вне этой области. Так функция неопределенности ![]() на интервале возможных значений
оцениваемых параметров должна иметь один резко выраженный выброс. При наличии
побочных, интенсивных выбросов, приближающихся по своей амплитуде к основному
выбросу, даже небольшой шум может привести к тому, что любой из максимумов
функции неопределенности может быть принят в качестве оценки, в результате чего
возникает неоднозначность оценки параметра. Кроме того, побочные выбросы
функции неопределенности сильных мешающих сигналов могут наложиться на основной
выброс более слабого полезного сигнала и полностью замаскировать его. Это
значит, что наличие побочных выбросов функции неопределенности ухудшает
разрешающую способность системы.
на интервале возможных значений
оцениваемых параметров должна иметь один резко выраженный выброс. При наличии
побочных, интенсивных выбросов, приближающихся по своей амплитуде к основному
выбросу, даже небольшой шум может привести к тому, что любой из максимумов
функции неопределенности может быть принят в качестве оценки, в результате чего
возникает неоднозначность оценки параметра. Кроме того, побочные выбросы
функции неопределенности сильных мешающих сигналов могут наложиться на основной
выброс более слабого полезного сигнала и полностью замаскировать его. Это
значит, что наличие побочных выбросов функции неопределенности ухудшает
разрешающую способность системы.
Все сказанное выше
позволяет утверждать, что идеальным был бы сигнал, для которого область высокой
корреляции функции неопределенности была бы возможно меньше, а область малой
корреляции отсутствовала бы вообще (т.н. «игольчатая» функция неопределенности).
Однако получение идеального сигнала наталкивается на серьезные принципиальные и
практические трудности. Принципиальная трудность связана с приведенным выше соотношением
(23), то есть «принципом неопределенности» из которого следует, что полный
объем под поверхностью ![]() всегда равен единице.
Действительно, для получения идеального сигнала нужно сделать возможно меньшей
часть объема под поверхностью
всегда равен единице.
Действительно, для получения идеального сигнала нужно сделать возможно меньшей
часть объема под поверхностью ![]() , расположенную вблизи
начала координат. Но так как полный объем под поверхностью
, расположенную вблизи
начала координат. Но так как полный объем под поверхностью ![]() должен оставаться неизменным (равным 1),
то при этом неизбежно увеличение части объема, расположенной вне центральной
области высокой корреляции. Это означает,
что при уменьшении центральной области высокой корреляции должен повыситься
уровень корреляции вне этой области, и могут даже появиться дополнительные
области высокой корреляции. Это может привести к ухудшению разрешающей
способности или появлению неоднозначность (если дополнительные области высокой
корреляции окажутся в пределах возможных значений измеряемых параметров).
Практические же трудности получения сигнала, близкого к идеальному, связаны с
усложнением аппаратуры.
должен оставаться неизменным (равным 1),
то при этом неизбежно увеличение части объема, расположенной вне центральной
области высокой корреляции. Это означает,
что при уменьшении центральной области высокой корреляции должен повыситься
уровень корреляции вне этой области, и могут даже появиться дополнительные
области высокой корреляции. Это может привести к ухудшению разрешающей
способности или появлению неоднозначность (если дополнительные области высокой
корреляции окажутся в пределах возможных значений измеряемых параметров).
Практические же трудности получения сигнала, близкого к идеальному, связаны с
усложнением аппаратуры.
Тем ни менее были
предприняты большие усилия по нахождению сигналов, обладающих функцией
неопределенности в той или иной степени близкой к идеальной. К сигналам,
имеющим функцию ![]() близкую к идеальной, относятся
так называемые псевдослучайные или шумоподобные сигналы. Ими, в частности,
являются так называемые фазоманипулированные (ФМ) сигналы, которые строятся по
следующему принципу. Отрезок времени
близкую к идеальной, относятся
так называемые псевдослучайные или шумоподобные сигналы. Ими, в частности,
являются так называемые фазоманипулированные (ФМ) сигналы, которые строятся по
следующему принципу. Отрезок времени ![]() , представляющий собой
длительность сигнала, разбивается на
, представляющий собой
длительность сигнала, разбивается на ![]() временных интервалов,
каждый длительностью
временных интервалов,
каждый длительностью ![]() . Амплитуда колебаний сигнала
является величиной постоянной, одинаковой на всех временных интервалах.
Начальная же фаза колебаний на каждом временном интервале может принимать одно
из двух значений:
. Амплитуда колебаний сигнала
является величиной постоянной, одинаковой на всех временных интервалах.
Начальная же фаза колебаний на каждом временном интервале может принимать одно
из двух значений: ![]() и
и ![]() . Иначе
говоря, начальная фаза
. Иначе
говоря, начальная фаза ![]() на произвольном i-м интервале равна
на произвольном i-м интервале равна ![]() . Изменение фазы производится по заранее
составленному коду, посредством которого устанавливается двоичная
последовательность чисел
. Изменение фазы производится по заранее
составленному коду, посредством которого устанавливается двоичная
последовательность чисел ![]() определяющая сигнал.
Эффективная ширина спектра такого сигнала
определяющая сигнал.
Эффективная ширина спектра такого сигнала ![]() .
Функция неопределенности
.
Функция неопределенности ![]() этих сигналов при
достаточно большом произведении длительности на ширину спектра
этих сигналов при
достаточно большом произведении длительности на ширину спектра ![]() или при достаточно большом числе
интервалов
или при достаточно большом числе
интервалов ![]() имеет почти идеальный вид. Главный выброс
функции
имеет почти идеальный вид. Главный выброс
функции ![]() , или область высокой корреляции,
располагается на плоскости
, или область высокой корреляции,
располагается на плоскости ![]() в окрестности нуля и
имеет протяженность, примерно равную
в окрестности нуля и
имеет протяженность, примерно равную ![]() (или
(или ![]() ) по оси
) по оси ![]() и
и ![]() – по оси
– по оси ![]() .
Основная часть (примерно
.
Основная часть (примерно ![]() ) единичного объема
тела неопределенности распределена в виде сравнительно небольших побочных
выбросов на широкой полосе
) единичного объема
тела неопределенности распределена в виде сравнительно небольших побочных
выбросов на широкой полосе ![]() .
.
Предложено много
различных способов построения кодов для получения псевдослучайных сигналов [14],
имеющих благоприятные корреляционные функции ![]() .
Среди этих сигналов, по-видимому, наибольшее распространение находят
псевдослучайные ФМ сигналы, составляемые на основе максимальных линейных
рекуррентных последовательностей (сигналы Хаффмена или М-последовательности).
.
Среди этих сигналов, по-видимому, наибольшее распространение находят
псевдослучайные ФМ сигналы, составляемые на основе максимальных линейных
рекуррентных последовательностей (сигналы Хаффмена или М-последовательности).
Наконец, вид функции
неопределенности в значительной мере влияет на схему оптимальной обработки,
которая должна воспроизводить модульное значение корреляционного интеграла ![]() (20). Положим, сначала, что измеряемый
параметр
(20). Положим, сначала, что измеряемый
параметр ![]() является скалярным (например, задержка
является скалярным (например, задержка ![]() ) и принадлежит априорному интервалу
возможных значений
) и принадлежит априорному интервалу
возможных значений ![]() . Оптимальная система, в общем
случае, строится по многоканальной схеме (рис. 5) и воспроизводит на априорном
интервале вместо непрерывной функции
. Оптимальная система, в общем
случае, строится по многоканальной схеме (рис. 5) и воспроизводит на априорном
интервале вместо непрерывной функции ![]() совокупность ее
дискретных значений:
совокупность ее
дискретных значений: ![]() . Очевидно, число каналов обработки
N должно выбираться таким, чтобы при
любом истинном значении измеряемого параметра хотя бы в одном канале имел место
резкий выброс сигнальной составляющей выходного эффекта. Иначе говоря,
«расстояние» между соседними каналами должно быть не меньше ширины основного
пика функции неопределенности
. Очевидно, число каналов обработки
N должно выбираться таким, чтобы при
любом истинном значении измеряемого параметра хотя бы в одном канале имел место
резкий выброс сигнальной составляющей выходного эффекта. Иначе говоря,
«расстояние» между соседними каналами должно быть не меньше ширины основного
пика функции неопределенности ![]() , которую называют
шириной области высокой корреляции. Ширину области высокой корреляции
, которую называют
шириной области высокой корреляции. Ширину области высокой корреляции ![]() отсчитывают на заранее обусловленном
уровне (обычно 0.5-0.7) или определяют соотношением
отсчитывают на заранее обусловленном
уровне (обычно 0.5-0.7) или определяют соотношением
|
(24) |
Таким образом минимально
необходимое число каналов в схеме оптимальной обработки равно  .
.
Совершенно аналогично при
векторном параметре ![]() , принадлежащем априорному
интервалу
, принадлежащем априорному
интервалу ![]() можно определить ширину области высокой
корреляции
можно определить ширину области высокой
корреляции ![]() по каждому параметру
по каждому параметру ![]() и
и ![]() . Для
этого нужно задать уровень отсчета высокой корреляции или воспользоваться
соотношением аналогичным (24):
. Для
этого нужно задать уровень отсчета высокой корреляции или воспользоваться
соотношением аналогичным (24):
|
|
|
|
|
|
|
(25) |
|
(26) |
где ![]() –
комплексная огибающая элементарного сигнала,
–
комплексная огибающая элементарного сигнала, ![]() –
период повторения.
–
период повторения.
Будем считать, что
измерение угловых координат целей, а также соответствующее их разрешение
осуществляется методом сканирования узкой диаграммой направленности. Для
простоты, будем рассматривать плоское сканирование, то есть пеленгацию в одной
плоскости. Отсчет угловой координаты отражающего объекта производится по
направлению диаграммы направленности в момент времени, соответствующий
прохождению интенсивности принимаемых колебаний через максимальное значение.
Обозначим амплитудно-фазовую диаграмму направленности по напряжению ![]() , где угол
, где угол ![]() соответствует
направлению максимального усиления, так что
соответствует
направлению максимального усиления, так что ![]() .
.
Радиолокационный сигнал,
отраженный от цели с координатами ![]() (соответственно
(соответственно ![]() ) и
) и ![]() , где
, где ![]() – момент времени, в который максимум
диаграммы
– момент времени, в который максимум
диаграммы ![]() направлен на цель, а
направлен на цель, а ![]() – угловая скорость сканирования диаграммы,
будет иметь вид
– угловая скорость сканирования диаграммы,
будет иметь вид
|
(27) |

Как и ранее, ![]() и
и ![]() –
амплитудный множитель и начальная фаза, рассматриваемые как несущественные
параметры сигнала. Здесь мы считаем, что флуктуации отражательных свойств цели
медленные, так что время корреляции функций
–
амплитудный множитель и начальная фаза, рассматриваемые как несущественные
параметры сигнала. Здесь мы считаем, что флуктуации отражательных свойств цели
медленные, так что время корреляции функций ![]() и
и ![]() значительно больше (по крайней мере на
порядок) интервала наблюдения или длительности отраженного от цели сигнала
(27). При этом можно считать, что функции
значительно больше (по крайней мере на
порядок) интервала наблюдения или длительности отраженного от цели сигнала
(27). При этом можно считать, что функции ![]() и
и ![]() за время наблюдения имеют, хотя и
случайные, но постоянные значения
за время наблюдения имеют, хотя и
случайные, но постоянные значения ![]() и
и ![]() . Именно это условие и позволяет
рассматривать отраженный сигнал (27) как когерентный. В случае если это условие
не выполняется, то отраженный сигнал следует рассматривать как некогерентный.
. Именно это условие и позволяет
рассматривать отраженный сигнал (27) как когерентный. В случае если это условие
не выполняется, то отраженный сигнал следует рассматривать как некогерентный.
|
(28) |

где ![]() нормирующий
множитель, такой что
нормирующий
множитель, такой что ![]() . В этом выражении
. В этом выражении
|
|
|

комплексная функция неопределенности
срезающего множителя ![]() , обусловленного сканированием
диаграммы направленности и
, обусловленного сканированием
диаграммы направленности и ![]() комплексная функция
неопределенности элементарного сигнала последовательности излученных
радиоимпульсов.
комплексная функция
неопределенности элементарного сигнала последовательности излученных
радиоимпульсов.
Из формулы (28) следует,
что в общем случае поверхность тела неопределенности когерентной
последовательности радиоимпульсов (при ![]() )
состоит из большого числа пиков с характерным расстоянием
)
состоит из большого числа пиков с характерным расстоянием ![]() по оси
по оси ![]() и
и ![]() по оси
по оси ![]() ,
разделенных областями средней, малой и нулевой корреляции. Конкретный вид этой
поверхности определяется видом элементарного сигнала, а также формой срезающей
функции (диаграммой направленности).
,
разделенных областями средней, малой и нулевой корреляции. Конкретный вид этой
поверхности определяется видом элементарного сигнала, а также формой срезающей
функции (диаграммой направленности).
На интервале
однозначности оценок временных задержек ![]() и
частотных сдвигов
и
частотных сдвигов  выражение (28) приобретает вид
выражение (28) приобретает вид
|
(29) |
Выражения (28) и (29)
позволяют сделать ряд практических выводов. Так, при совместной оценке
дальности, угловой координаты и скорости цели в системах пеленгации по методу
сканирования диаграммы направленности потенциальные возможности системы по
дальности (разрешающая способность, точность и однозначность отсчета) при
данном энергетическом отношении сигнал/шум ![]() зависят
только от формы элементарного сигнала, точнее от его корреляционной функции
зависят
только от формы элементарного сигнала, точнее от его корреляционной функции ![]() . Разрешающая способность по скорости и точность
отсчета параметра
. Разрешающая способность по скорости и точность
отсчета параметра ![]() определяется в основном
длительностью когерентного сигнала, то есть скоростью сканирования и шириной
диаграммы направленности. Потенциальные возможности системы по угловым
координатам определяются корреляционной функцией диаграммы направленности
определяется в основном
длительностью когерентного сигнала, то есть скоростью сканирования и шириной
диаграммы направленности. Потенциальные возможности системы по угловым
координатам определяются корреляционной функцией диаграммы направленности
|
(30) |

и от самой диаграммы направленности ![]() зависят в той мере, в какой от нее
зависит функция
зависят в той мере, в какой от нее
зависит функция ![]() .
.
|
|
|
а разрешающая
способность по угловой координате зависит от ширины главного лепестка функции ![]() (от протяженности области высокой
корреляции), а также от наличия и интенсивности побочных лепестков функции
(от протяженности области высокой
корреляции), а также от наличия и интенсивности побочных лепестков функции ![]() .
.
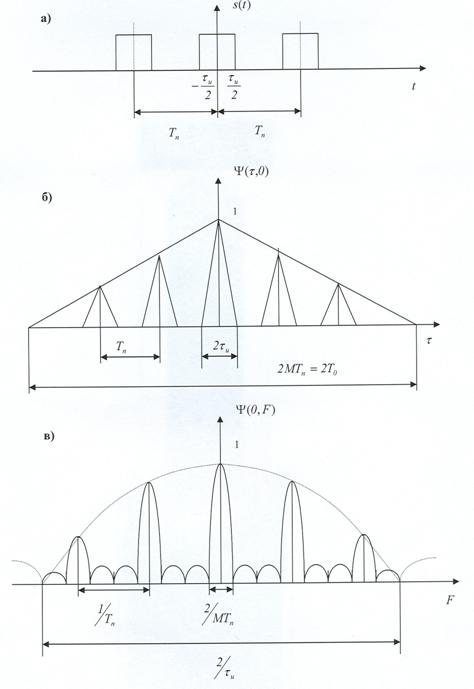
Рис. 10. Сечения функции
неопределенности ![]() прямоугольной
прямоугольной
когерентной пачки прямоугольных радиоимпульсов.
На рис. 10 показаны
сечения плоскостями ![]() (рисунок 10б) и
(рисунок 10б) и ![]() (рисунок 10в) тела неопределенности
прямоугольной когерентной пачки прямоугольных радиоимпульсов (рис. 10а) с
постоянной мгновенной частотой колебаний (без внутриимпульсной модуляции), то
есть в случае, когда диаграмма направленности аппроксимируется прямоугольной
функцией.
(рисунок 10в) тела неопределенности
прямоугольной когерентной пачки прямоугольных радиоимпульсов (рис. 10а) с
постоянной мгновенной частотой колебаний (без внутриимпульсной модуляции), то
есть в случае, когда диаграмма направленности аппроксимируется прямоугольной
функцией.
|
(31) |
где ![]() .
.
Функция неопределенности
(22) для сигнала (31) имеет отличные от нуля значения в пределах временного
интервала ![]() , в котором описывается выражением
, в котором описывается выражением
|
(32) |

|
(33) |
Сечение ![]() описывает отклик согласованного фильтра
на пачечный когерентный сигнал без расстройки по частоте. Отклик состоит из
ромбовидных радиоимпульсов шириной
описывает отклик согласованного фильтра
на пачечный когерентный сигнал без расстройки по частоте. Отклик состоит из
ромбовидных радиоимпульсов шириной ![]() по основанию, взаимно
сдвинутых на период посылки
по основанию, взаимно
сдвинутых на период посылки ![]() . Каждый пик сечения
. Каждый пик сечения ![]() и огибающая пиков имеют треугольную форму
(рис. 10). Сечение
и огибающая пиков имеют треугольную форму
(рис. 10). Сечение ![]() соответствует
амплитудно-частотному спектру квадрата огибающей (а в данном случае – самой
огибающей) сигнала. Спектр огибающей пачки состоит из ряда гребней, взаимно
сдвинутых на частоту
соответствует
амплитудно-частотному спектру квадрата огибающей (а в данном случае – самой
огибающей) сигнала. Спектр огибающей пачки состоит из ряда гребней, взаимно
сдвинутых на частоту ![]() . При
. При ![]() ширина
центрального гребня по нулям
ширина
центрального гребня по нулям ![]() , где
, где ![]() – длительность пачки. Ширина огибающей
гребней по нулям определяется длительностью одного импульса и равна
– длительность пачки. Ширина огибающей
гребней по нулям определяется длительностью одного импульса и равна ![]() . Аналогичные гребни с уменьшающейся
интенсивностью будут в сечениях
. Аналогичные гребни с уменьшающейся
интенсивностью будут в сечениях ![]() и так далее. Из
сравнения тел неопределенности одиночных и пачечных когерентных сигналов с
одинаковой длительностью радиоимпульсов следует, что пачечные сигналы
обеспечивают существенно более высокую разрешающую способность по частоте
(радиальной скорости цели). Однако, в силу периодического характера сигнала, проявляется
неоднозначность измерений времени запаздывания (дальности) и частоты
(радиальной скорости). При этом устранение эффекта неоднозначности по одному из
параметров сопровождается его усилением по другому.
и так далее. Из
сравнения тел неопределенности одиночных и пачечных когерентных сигналов с
одинаковой длительностью радиоимпульсов следует, что пачечные сигналы
обеспечивают существенно более высокую разрешающую способность по частоте
(радиальной скорости цели). Однако, в силу периодического характера сигнала, проявляется
неоднозначность измерений времени запаздывания (дальности) и частоты
(радиальной скорости). При этом устранение эффекта неоднозначности по одному из
параметров сопровождается его усилением по другому.
1.
Ширину главного
пика функции неопределенности по оси частот (доплеровского сдвига) можно
уменьшить, увеличив ![]() (или
(или ![]() ),
то есть увеличив ширину диаграммы направленности и/или уменьшив скорость ее сканирования.
),
то есть увеличив ширину диаграммы направленности и/или уменьшив скорость ее сканирования.
2.
Ширину главного
пика по оси времени (дальности) можно уменьшить, уменьшив длительность импульса
![]() . Это соответствует расширению спектра
сигнала.
. Это соответствует расширению спектра
сигнала.
Оценим основные параметры
когерентной последовательности зондирующих радиоимпульсов ![]() , а также зоны однозначного измерения
дальности и скорости, исходя из заданных тактико-технических требований на РЛ
систему терагерцового диапазона. Так, диапазон измеряемых дальностей (50–2000
м) определяет интервал возможных задержек, принимаемых РЛ системой, сигналов
, а также зоны однозначного измерения
дальности и скорости, исходя из заданных тактико-технических требований на РЛ
систему терагерцового диапазона. Так, диапазон измеряемых дальностей (50–2000
м) определяет интервал возможных задержек, принимаемых РЛ системой, сигналов ![]() , где
, где ![]() и
и ![]() .
.
Минимальная
задержка ![]() накладывает ограничение на возможное
значение длительности зондирующего импульса
накладывает ограничение на возможное
значение длительности зондирующего импульса ![]() , а
именно она должна быть строго меньше
, а
именно она должна быть строго меньше ![]() :
: ![]() . Это ограничение обусловлено тем, что
приемник РЛ системы, работающей в импульсном режиме, в момент излучения
зондирующего импульса полностью закрывается и не может принимать сигналов,
отраженных от целей. В свою очередь, максимальная задержка
. Это ограничение обусловлено тем, что
приемник РЛ системы, работающей в импульсном режиме, в момент излучения
зондирующего импульса полностью закрывается и не может принимать сигналов,
отраженных от целей. В свою очередь, максимальная задержка ![]() позволяет определить нижнюю границу
периода повторения импульсов, обеспечивающую однозначное измерение дальности.
Как было показано выше, для однозначного определения дальности до цели должно
выполняться неравенство
позволяет определить нижнюю границу
периода повторения импульсов, обеспечивающую однозначное измерение дальности.
Как было показано выше, для однозначного определения дальности до цели должно
выполняться неравенство ![]() . Вместе с тем,
согласно тактико-техническим требованиям РЛ система должна, помимо дальности,
измерять также и скорость цели в диапазоне (0.1–300 м/с). Это накладывает
дополнительное ограничение на величину периода повторения импульсов
. Вместе с тем,
согласно тактико-техническим требованиям РЛ система должна, помимо дальности,
измерять также и скорость цели в диапазоне (0.1–300 м/с). Это накладывает
дополнительное ограничение на величину периода повторения импульсов ![]() . Так, для однозначного измерения
доплеровского сдвига частоты (радиальной скорости цели) необходимо, чтобы
. Так, для однозначного измерения
доплеровского сдвига частоты (радиальной скорости цели) необходимо, чтобы  (где
(где ![]() .
доплеровский сдвиг, обусловленный движением цели с максимальной фиксируемой
радиальной скоростью
.
доплеровский сдвиг, обусловленный движением цели с максимальной фиксируемой
радиальной скоростью ![]() ). Полагая
). Полагая ![]() получаем, что для однозначного измерения
скорости целей в заданном диапазоне их значений необходимо, чтобы
получаем, что для однозначного измерения
скорости целей в заданном диапазоне их значений необходимо, чтобы ![]() , что противоречит условию однозначного
измерения дальности (
, что противоречит условию однозначного
измерения дальности (![]() ). Если в качестве максимальной
скорости цели принять значение 30 м/сек (108 км/час), то для однозначного
измерения скорости необходимо, чтобы
). Если в качестве максимальной
скорости цели принять значение 30 м/сек (108 км/час), то для однозначного
измерения скорости необходимо, чтобы ![]() , что вполне
согласуется с условием однозначного измерения дальности. Таким образом, при
использовании когерентной периодической последовательности простых (немодулированных)
радиоимпульсов для однозначного измерения дальности (в диапазоне 50–2000 м) и
скорости (0.1–30 м/с) период их повторения должен удовлетворять следующему
условию:
, что вполне
согласуется с условием однозначного измерения дальности. Таким образом, при
использовании когерентной периодической последовательности простых (немодулированных)
радиоимпульсов для однозначного измерения дальности (в диапазоне 50–2000 м) и
скорости (0.1–30 м/с) период их повторения должен удовлетворять следующему
условию: ![]() .
.

a)

b)
На
рис. 12 показаны, для сравнения, сечения функции неопределенности при ![]() для a) регулярной периодической импульсной последовательности
(рис. 12a) и, б) приведенной на рис. 11,
субоптимальной нерегулярной последовательности из семи импульсов (рис. 12б).
для a) регулярной периодической импульсной последовательности
(рис. 12a) и, б) приведенной на рис. 11,
субоптимальной нерегулярной последовательности из семи импульсов (рис. 12б).
a)
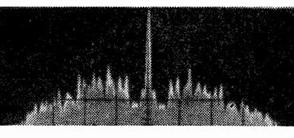
b)
Рис. 12. Сравнение сечений функции неопределенности при ![]() для:
для:
Зондирующие сигналы,
построенные на базе нерегулярных импульсных последовательностей со свойством
«не более одного совпадения» обладают целым рядом полезных свойств. Так, для
них практически решается проблема «слепых дальностей», свойственная регулярным
импульсным последовательностям, так как гарантировано, что при приеме такого
сигнала будет потеряно не более одного импульса. Благодаря свойству «не более
одного совпадения» относительный уровень остатков на всей плоскости ![]() функции неопределенности не превышает 1/N, за исключением полосы
функции неопределенности не превышает 1/N, за исключением полосы ![]() вдоль оси
вдоль оси ![]() . Кроме
того, свойство «не более одного совпадения» для таких сигналов позволяет
практически исключить явление подавления сильным сигналом, перекрывающегося с
ним, слабого сигнала, когда в состав приемника входит ограничитель. Все эти
свойства нерегулярных импульсных сигналов могут оказаться весьма полезными в
условиях, когда требуется однозначное измерение дальности и скорости целей в
широком диапазоне изменения их величин.
. Кроме
того, свойство «не более одного совпадения» для таких сигналов позволяет
практически исключить явление подавления сильным сигналом, перекрывающегося с
ним, слабого сигнала, когда в состав приемника входит ограничитель. Все эти
свойства нерегулярных импульсных сигналов могут оказаться весьма полезными в
условиях, когда требуется однозначное измерение дальности и скорости целей в
широком диапазоне изменения их величин.
Описанные выше
нерегулярные импульсные сигналы относятся к классу одночастотных сигналов,
когда одна несущая частота модулируется по закону нерегулярной импульсной
последовательности. Однако подобного рода одночастотные сигналы имеют существенный
недостаток: при увеличении числа импульсов в последовательности быстро растет
ее длина и, как следствие, уменьшается средняя мощность сигнала. Этот
недостаток в значительной степени преодолевается для сигналов, построенных на
основе многочастотных импульсных последовательностей с числом совпадений «не
более единицы». Введение дополнительного параметра (частоты) позволяет, при
прочих равных условиях, уменьшить длину нерегулярной импульсной
последовательности и повысить энергию сигнала, увеличив тем самым его среднюю
мощность. Метод построения многочастотных нерегулярных импульсных последовательностей
со свойством «не более одного совпадения» при любом временном сдвиге между
сигналами представлен в работе [18]. На рис. 13a приведена структура многочастотной нерегулярной импульсной
последовательности с числом совпадений «не более единицы» для сигнала,
состоящего из 23 элементов, расположенных на 63 дискретных позициях, а на рис.
13б показана автокорреляционная функция сигнала, модулированного такой
последовательностью, при условии, что длительность элемента ![]() мкс, а сдвиг по частоте
мкс, а сдвиг по частоте ![]() МГц.
МГц.
Как видно из рис. 13,
боковые лепестки на всем протяжении от 0.8 мкс до 50.4 мкс имеют однородную
структуру и не превышают 1/N=1/23=0.044
(свойство «не более одного совпадения). Кроме того, в отличие от одночастотной
импульсной последовательности, главный лепесток автокорреляционной функции
имеет меньшую длительность 0.08 мкс и пьедестал высотой 0.22 в пределах ![]() 0.8 мкс.
0.8 мкс.

a)
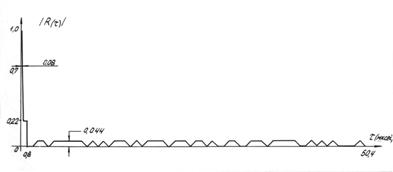
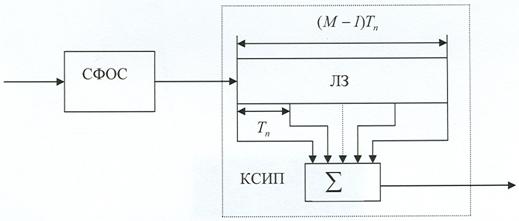
Основная сложность
осуществления этой схемы состоит в выполнении линии задержки на время ![]() с
с ![]() отводами,
полосой
отводами,
полосой ![]() и стабильностью задержки
и стабильностью задержки ![]() , где
, где ![]() – несущая
частота задерживаемых колебаний. Столь высокие требования к стабильности
задержки задерживающего устройства и его элементов объясняется тем, что в
рассматриваемом фильтре должно происходить синфазное сложение колебаний,
которое может нарушить температурные нестабильности устройства задержки.
Поэтому для нормальной работы фильтра нестабильности должны быть много меньше
периода колебаний несущей частоты.
– несущая
частота задерживаемых колебаний. Столь высокие требования к стабильности
задержки задерживающего устройства и его элементов объясняется тем, что в
рассматриваемом фильтре должно происходить синфазное сложение колебаний,
которое может нарушить температурные нестабильности устройства задержки.
Поэтому для нормальной работы фильтра нестабильности должны быть много меньше
периода колебаний несущей частоты.
Несколько упрощается
реализация устройства когерентной обработки последовательностей радиоимпульсов,
если заменить радиочастотный накопитель радиочастотным рециркулятором (рис.
15), так как в этом случае устройство задержки выполняется на время ![]() и не
имеет дополнительных отводов. Однако осуществление и такого устройства с
нестабильностями, много меньшими периода несущего колебания, – весьма сложная и
практически невыполнимая задача. В этом и заключается главный недостаток
оптимальных фильтров для когерентных последовательностей радиоимпульсов
и вообще фильтрового метода их оптимальной обработки.
и не
имеет дополнительных отводов. Однако осуществление и такого устройства с
нестабильностями, много меньшими периода несущего колебания, – весьма сложная и
практически невыполнимая задача. В этом и заключается главный недостаток
оптимальных фильтров для когерентных последовательностей радиоимпульсов
и вообще фильтрового метода их оптимальной обработки.
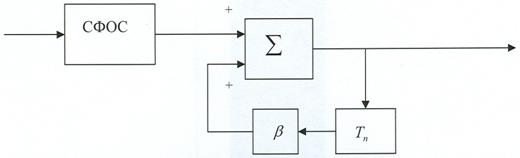
Как
уже было сказано выше, оптимальная обработка радиолокационного сигнала на фоне
белого шума сводится к вычислению корреляционного интеграла (или его модуля),
которое может быть произведено корреляционным, фильтровым или
корреляционно-фильтровым методом. При одном из вариантов
корреляционно-фильтрового метода умножение принимаемого колебания на несущее колебание
![]() производится в когерентном детекторе
(КГД), управляемым указанным колебанием и преобразующем принимаемое колебание в
видеочастотное (рис. 16). Фильтрация последнего осуществляется с помощью
оптимального фильтра (ОФ), построенного для видеочастотной огибающей сигнала и
работающего на видеочастоте, вследствие чего существенно упрощается его
реализация.
производится в когерентном детекторе
(КГД), управляемым указанным колебанием и преобразующем принимаемое колебание в
видеочастотное (рис. 16). Фильтрация последнего осуществляется с помощью
оптимального фильтра (ОФ), построенного для видеочастотной огибающей сигнала и
работающего на видеочастоте, вследствие чего существенно упрощается его
реализация.
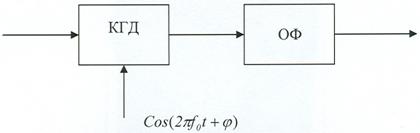

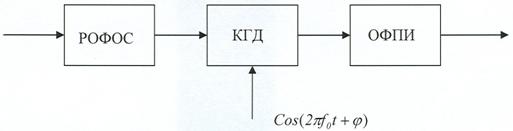
Рассмотрим
еще одну возможность корреляционно-фильтрового метода при оптимальной обработке
когерентной последовательности радиоимпульсных сигналов [6]. Для этого
представим функцию ![]() в выражении корреляционного
интеграла (11), описывающую ожидаемую пачку радиоимпульсов, в виде произведения
двух функций: а) функции
в выражении корреляционного
интеграла (11), описывающую ожидаемую пачку радиоимпульсов, в виде произведения
двух функций: а) функции ![]() , соответствующей
неограниченной периодической последовательности видеоимпульсов и б) функции
, соответствующей
неограниченной периодической последовательности видеоимпульсов и б) функции ![]() , соответствующей колебанию частоты
, соответствующей колебанию частоты ![]() , модулированному огибающей пачки. В этом
случае операция вычисления корреляционного интеграла (16) приобретает следующий
смысл. Принимаемое колебание
, модулированному огибающей пачки. В этом
случае операция вычисления корреляционного интеграла (16) приобретает следующий
смысл. Принимаемое колебание ![]() стробируется
периодической последовательностью видеоимпульсов, временное положение которых
соответствует ожидаемой пачке. Операции умножения полученного колебания на
стробируется
периодической последовательностью видеоимпульсов, временное положение которых
соответствует ожидаемой пачке. Операции умножения полученного колебания на ![]() и интегрирование осуществляются фильтром
с импульсной характеристикой вида
и интегрирование осуществляются фильтром
с импульсной характеристикой вида ![]() . Приближением такого
фильтра является узкополосный контур с полосой, обратно пропорциональной
длительности пачки (
. Приближением такого
фильтра является узкополосный контур с полосой, обратно пропорциональной
длительности пачки (![]() ). Растягиваясь в контуре,
импульсы сигнала накладываются и когерентно суммируются. Предварительное
стробирование устраняет возможное накопление шумов за время отсутствия сигнала.
Большое время накопления узкополосного контура предотвращает затухание
колебаний до окончания действия сигнала. Накопление в корреляционно-фильтровом
обнаружителе осуществляется, в отличие от чисто корреляционного, на радио, а не
видеочастоте. Это сокращает в два раза число подканалов обработки при случайной
начальной фазе сигнала (отпадает надобность в квадратурных каналах), достаточно
выход схемы подать на детектор.
). Растягиваясь в контуре,
импульсы сигнала накладываются и когерентно суммируются. Предварительное
стробирование устраняет возможное накопление шумов за время отсутствия сигнала.
Большое время накопления узкополосного контура предотвращает затухание
колебаний до окончания действия сигнала. Накопление в корреляционно-фильтровом
обнаружителе осуществляется, в отличие от чисто корреляционного, на радио, а не
видеочастоте. Это сокращает в два раза число подканалов обработки при случайной
начальной фазе сигнала (отпадает надобность в квадратурных каналах), достаточно
выход схемы подать на детектор.
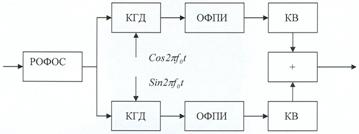
Накопление
с помощью узкополосного контура (рис. 20) проводят обычно на промежуточной,
а не на высокой радиочастоте. Стробированию видеоимпульсами должна предшествовать в этом случае
преселекция с подавлением зеркального канала приема и последующее
преобразование на промежуточную частоту. Схема на рис. 20 рассчитана на прием
сигнала с известными временем запаздывания ![]() и
доплеровской частоты
и
доплеровской частоты ![]() . Если эти параметры неизвестны,
приходим к многоканальной схеме на рис. 21. После преобразователя частоты схема
разветвляется по каналам дальности, рассчитанным на фиксированные значения
времени запаздывания. Каждый дальностный канал содержит набор узкополосных
фильтров, перекрывающих ожидаемый диапазон доплеровских частот. Выходные
напряжения частотных подканалов подаются (после детектора) на схему отбора по
максимуму канала дальности. Напряжение схемы отбора каждого дальностного канала
подвергается повторному стробированию импульсами для ожидаемой дальности.
. Если эти параметры неизвестны,
приходим к многоканальной схеме на рис. 21. После преобразователя частоты схема
разветвляется по каналам дальности, рассчитанным на фиксированные значения
времени запаздывания. Каждый дальностный канал содержит набор узкополосных
фильтров, перекрывающих ожидаемый диапазон доплеровских частот. Выходные
напряжения частотных подканалов подаются (после детектора) на схему отбора по
максимуму канала дальности. Напряжение схемы отбора каждого дальностного канала
подвергается повторному стробированию импульсами для ожидаемой дальности.
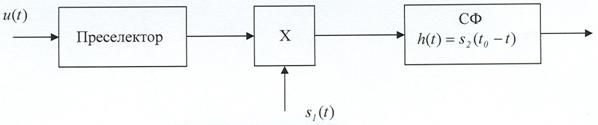
3.2. Оптимальная обработка радиолокационных сигналов, отраженных от точечных целей с доплеровским рассеянием
Если излученный
зондирующий сигнал является известным узкополосным сигналом (7), то сигнал,
отраженный от цели с доплеровским рассеянием, находящейся в точке ![]() (расстояние до которой измеряется в
единицах времени распространения сигнала до цели и обратно), можно записать в
виде
(расстояние до которой измеряется в
единицах времени распространения сигнала до цели и обратно), можно записать в
виде
|
(34) |
|
|
|
В выражении (34) ![]() – выборочная функция комплексного
гауссова процесса. Предполагается, что функция
– выборочная функция комплексного
гауссова процесса. Предполагается, что функция ![]() изменяется
медленно по сравнению с несущей частотой
изменяется
медленно по сравнению с несущей частотой ![]() .
Случайный процесс
.
Случайный процесс ![]() полностью определяется своей
комплексной ковариационной функцией
полностью определяется своей
комплексной ковариационной функцией
|
(35) |
Так как процесс отражения
сигнала от цели предполагается стационарным, то функцию ![]() можно
также описывать с помощью ее энергетического спектра
можно
также описывать с помощью ее энергетического спектра
|
|
(36) |
Действительная функция ![]() называется функцией доплеровского
рассеяния. Среднее значение функции рассеяния
называется функцией доплеровского
рассеяния. Среднее значение функции рассеяния
|
|
|
|
|
|
где ![]() ковариационная
функция процесса
ковариационная
функция процесса ![]() за вычетом его среднего
доплеровского сдвига частоты.
за вычетом его среднего
доплеровского сдвига частоты.
Если
теперь предположить, что цель точечная и находится на расстоянии ![]() , которое соответствует времени
, которое соответствует времени ![]() распространения сигнала в прямом и
обратном направлениях, что она движется с постоянной скоростью, соответствующей
доплеровскому сдвигу частоты
распространения сигнала в прямом и
обратном направлениях, что она движется с постоянной скоростью, соответствующей
доплеровскому сдвигу частоты ![]() , и, кроме того, цель
вызывает доплеровское рассеяние, характеризуемое функцией рассеяния
, и, кроме того, цель
вызывает доплеровское рассеяние, характеризуемое функцией рассеяния ![]() , то оптимальная обработка отраженного
сигнала, наблюдаемого на фоне белого шума, сводится к вычислению следующей
величины [11]:
, то оптимальная обработка отраженного
сигнала, наблюдаемого на фоне белого шума, сводится к вычислению следующей
величины [11]:
|
(37) |

где ![]() –
комплексная огибающая принимаемого сигнала и
–
комплексная огибающая принимаемого сигнала и ![]() определяется
с помощью следующего интегрального уравнения
определяется
с помощью следующего интегрального уравнения
|
(38) |

Предложено несколько схем
реализации оптимального приемника, вычисляющего значение ( 37) [10]. Так, если
представить весовую функцию ![]() в виде
в виде
|
|
|

|
(39) |
Оптимальный приемник,
вычисляющий величину ![]() согласно (39) строится по схеме
«фильтр – квадратор – интегратор» (рис. 21).
согласно (39) строится по схеме
«фильтр – квадратор – интегратор» (рис. 21).

Так же,
как и в случае медленно флуктуирующей цели, устройство обнаружения и измерения
дальности и скорости цели с доплеровским рассеянием строится по многоканальной
схеме, подобной (рис. 5) для множества значений ![]() и
и ![]() , соответствующих области на плоскости
«дальность-скорость», в которой они могут находиться. Отметим однако, что в
отличие от случая медленно флуктуирующей цели, здесь мы должны использовать
дискретное приближение как по дальности, так и по скорости. Оптимальную оценку
получают в результате отыскания такой точки на плоскости
, соответствующих области на плоскости
«дальность-скорость», в которой они могут находиться. Отметим однако, что в
отличие от случая медленно флуктуирующей цели, здесь мы должны использовать
дискретное приближение как по дальности, так и по скорости. Оптимальную оценку
получают в результате отыскания такой точки на плоскости ![]() , в которой функция
, в которой функция ![]() имеет максимум.
имеет максимум.
3.3. Оптимальная обработка радиолокационных сигналов, отраженных от протяженных медленно флуктуирующих целей
Сигнал, отраженный от
неровной поверхности цели, имеющей протяженность ![]() (измеряемую
в единицах времени распространения сигнала), можно представить в виде суперпозиции
сигналов, отраженных от элементарных участков поверхности (шириной
(измеряемую
в единицах времени распространения сигнала), можно представить в виде суперпозиции
сигналов, отраженных от элементарных участков поверхности (шириной ![]() ). В пределе
). В пределе ![]() комплексную
амплитуду отраженного от протяженной по дальности цели сигнала можно записать в
виде [2,9]
комплексную
амплитуду отраженного от протяженной по дальности цели сигнала можно записать в
виде [2,9]
|
(40) |
где ![]() – выборочная функция комплексного
гауссова процесса с нулевым средним, независимая переменная которой является
пространственной величиной
– выборочная функция комплексного
гауссова процесса с нулевым средним, независимая переменная которой является
пространственной величиной ![]() (в единицах времени
распространения сигнала до цели и обратно). Здесь считается, что цель не
флуктуирует и поэтому функция
(в единицах времени
распространения сигнала до цели и обратно). Здесь считается, что цель не
флуктуирует и поэтому функция ![]() не зависит от времени.
Очевидно (40), что цель с рассеянием по дальности ведет себя как линейный,
инвариантный во времени фильтр со случайной комплексной импульсной функцией
не зависит от времени.
Очевидно (40), что цель с рассеянием по дальности ведет себя как линейный,
инвариантный во времени фильтр со случайной комплексной импульсной функцией ![]() . Для полного задания
. Для полного задания ![]() необходимо знать ее комплексную ковариационную
функцию
необходимо знать ее комплексную ковариационную
функцию ![]() для всех
для всех ![]() .
.
|
|
(41) |
Выражение (41) дает
хорошее приближение, когда интервал корреляции процесса ![]() гораздо меньше, чем величина,
обратная ширине спектра сигнала
гораздо меньше, чем величина,
обратная ширине спектра сигнала ![]() .
.
Физически математическое
ожидание в выражении (41) связано с ожидаемым значением энергии, отраженной
(или рассеянной) от элемента цели, находящейся на расстоянии ![]() . Функцию
. Функцию
|
|
(42) |
|
|
(43) |

Таким образом задача
обнаружения протяженной по дальности цели на фоне шума может быть
сформулирована следующим образом. На вход приемника поступает колебание, комплексная
огибающая которого ![]() может содержать отраженный от
цели сигнал:
может содержать отраженный от
цели сигнал: ![]() (гипотеза H1), но может представлять собой один лишь шум:
(гипотеза H1), но может представлять собой один лишь шум: ![]() (гипотеза H0). Сигнал
(гипотеза H0). Сигнал ![]() (40) является
выборочной функцией комплексного гауссова процесса с нулевым средним, а его
ковариационная функция равна (43). Аддитивный шум
(40) является
выборочной функцией комплексного гауссова процесса с нулевым средним, а его
ковариационная функция равна (43). Аддитивный шум ![]() является
выборочной функцией статистически независимого комплексного белого гауссова
процесса с нулевым средним и спектральной плотностью
является
выборочной функцией статистически независимого комплексного белого гауссова
процесса с нулевым средним и спектральной плотностью ![]() .
Показывается [10], что оптимальный обнаружитель сигнала, отраженного от
протяженной по дальности цели, должен вычислять величину
.
Показывается [10], что оптимальный обнаружитель сигнала, отраженного от
протяженной по дальности цели, должен вычислять величину ![]() и
сравнивать ее с порогом
и
сравнивать ее с порогом ![]() :
:
|
(44) |
где функция ![]() является
решением следующего интегрального уравнения
является
решением следующего интегрального уравнения
|
(45) |

|
|
(46) |
|
|
(47) |

|
(48а) |
|
|
(48б) |
|
|
(49) |
Цель движется с
постоянной скоростью, соответствующей доплеровскому сдвигу ![]() . Комплексная огибающая принимаемого
сигнала имеет вид
. Комплексная огибающая принимаемого
сигнала имеет вид
|
|
(50) |
|
|

где ![]() .
.
Далее, подставляя
выражение (51) (при фиксированных значениях ![]() и
и ![]() (
(![]() )) в уравнение (45) находим весовые
функции
)) в уравнение (45) находим весовые
функции ![]() , определяющие оптимальный алгоритм
обработки (44), (48). Само же устройство обнаружения и измерения дальности и
скорости нефлуктуирующей цели с рассеянием по дальности, как и в предыдущих
случаях, строится по многоканальной схеме, аналогичной на рис. 5, для множества
значений
, определяющие оптимальный алгоритм
обработки (44), (48). Само же устройство обнаружения и измерения дальности и
скорости нефлуктуирующей цели с рассеянием по дальности, как и в предыдущих
случаях, строится по многоканальной схеме, аналогичной на рис. 5, для множества
значений ![]() и
и ![]() ,
соответствующих области на плоскости «дальность-скорость», в которой они могут
находиться.
,
соответствующих области на плоскости «дальность-скорость», в которой они могут
находиться.
3.3.4. Оптимальная обработка радиолокационных сигналов, отраженных от целей с рассеянием по двум параметрам
Если излучается сигнал с
комплексной огибающей ![]() , то эхо-сигнал, отраженный от
элемента поверхности подобной цели, характеризуемого интервалом дальности (
, то эхо-сигнал, отраженный от
элемента поверхности подобной цели, характеризуемого интервалом дальности (![]() ) представляет собой суперпозицию ряда
отраженных сигналов со случайными фазами, амплитуду которых можно моделировать
как релеевскую случайную величину. Поскольку ориентация и композиция
отражателей, которые участвуют в формировании эхо-сигнала, изменяется, в данном
случае, от времени, отраженный от цели в интервале дальностей (
) представляет собой суперпозицию ряда
отраженных сигналов со случайными фазами, амплитуду которых можно моделировать
как релеевскую случайную величину. Поскольку ориентация и композиция
отражателей, которые участвуют в формировании эхо-сигнала, изменяется, в данном
случае, от времени, отраженный от цели в интервале дальностей (![]() ) сигнал необходимо моделировать как
случайный процесс. Таким образом,
) сигнал необходимо моделировать как
случайный процесс. Таким образом,
|
(52) |
где ![]() –
комплексный гауссов процесс, независимые переменные которого суть пространство
и время. Отраженный от всей цели сигнал является суперпозицией эхо-сигналов от
элементов поверхности. Его комплексная огибающая
–
комплексный гауссов процесс, независимые переменные которого суть пространство
и время. Отраженный от всей цели сигнал является суперпозицией эхо-сигналов от
элементов поверхности. Его комплексная огибающая
|
|
(53) |
|
(54) |

|
|
(55) |
Функция ![]() есть функция двух переменных, которая
зависит от отражающих свойств цели. Подставляя (55) в (54), получим
есть функция двух переменных, которая
зависит от отражающих свойств цели. Подставляя (55) в (54), получим
|
|
(56) |

Корреляционная
функция ![]() (54) полностью определяет отраженный от
цели сигнал. Удобно ввести функцию рассеяния, определяемую как
(54) полностью определяет отраженный от
цели сигнал. Удобно ввести функцию рассеяния, определяемую как
|
|
(57) |
Физически функция ![]() представляет собой спектр процесса
представляет собой спектр процесса ![]() . Это действительная неотрицательная
функция аргументов
. Это действительная неотрицательная
функция аргументов ![]() и
и ![]() .
Ковариационную функцию (54) можно также записать, используя функцию рассеяния
(52) в виде
.
Ковариационную функцию (54) можно также записать, используя функцию рассеяния
(52) в виде
|
|
(58) |

Если функция рассеяния
сконцентрирована в одной области плоскости ![]() (задержка
– частота), то можно ввести понятия среднего запаздывания при распространении
сигнала до цели (дальности)
(задержка
– частота), то можно ввести понятия среднего запаздывания при распространении
сигнала до цели (дальности)
|
|
(59) |
|
|
(60) |
|
|
|
Рассмотрим задачу оценки
средней дальности и среднего доплеровского сдвига цели с рассеянием по двум
параметрам. Обозначим среднюю дальность через ![]() , а
средний доплеровский сдвиг – через
, а
средний доплеровский сдвиг – через ![]() . Функцию рассеяния запишем
в виде
. Функцию рассеяния запишем
в виде
|
|
(61) |
|
|
|
Для отыскания оптимальных
оценок параметров ![]() разобьем плоскость
разобьем плоскость ![]() на множество ячеек «дальность –
скорость». Обозначим координаты центра i-й ячейки через
на множество ячеек «дальность –
скорость». Обозначим координаты центра i-й ячейки через ![]() . Для каждой такой
ячейки должно вычисляться значение функции
. Для каждой такой
ячейки должно вычисляться значение функции ![]() [10]:
[10]:
|
|
(62) |

где функция ![]() определяется
интегральным уравнением
определяется
интегральным уравнением
|
|

3.5. Автоматическая классификация (распознавание объектов)
Распознавание цели – это определение типа цели путем анализа данных о ее параметрах движения и поведения, характере ее излучений и других данных, поступающих с РЛС. Задача распознавания типа цели в радиолокации является одной из наиболее сложных, причем основная сложность заключается в определении набора признаков отраженного сигнала, по которым и проводится распознавание. В качестве признаков могут использоваться амплитудные и фазовые спектры отраженных сигналов, поляризационные характеристики (элементы поляризационной матрицы рассеяния), статистические характеристики элементов радиолокационного портрета цели (при сверхразрешении по дальности), баллистические и тактические свойства объекта и многие другие.
Решение задачи классификации цели выполняется классификатором на основании анализа значений признаков, поступающих на его вход с выхода выделителя признаков. Высшим уровнем решения этой задачи является распознавание обнаруженного объекта по его изображению до типа и состояния (например, танк MI в движении), средним уровнем – распознавание до вида (танк), низшим – распознавание объекта по одному или нескольким признакам до класса (объект бронетанковой техники). В роли классификатора может выступать как человек, анализирующий и интерпретирующий входные данные, представленные в этом случае, как правило, в виде изображения, так и автоматическое устройство. Далее будем рассматривать только автоматический режим работы классификатора.
Основу работы автоматических классификаторов составляют алгоритмы, построенные для решения задач распознавания образов. Ниже, очень кратко приведем постановку задачи распознавания образов в ее формальном, математическом плане, а также опишем некоторые из наиболее распространенных методов ее решения, которые могут быть использованы при решении задач распознавания. Обычно области существования признаков различных типов целей перекрываются, поэтому для распознавания применимы методы теории решений. Фактически во многих методах распознавания используются критерии отношения правдоподобия. Применяются и некоторые другие методы: обучающиеся машины, искусственный интеллект и так далее [19].
В формальном математическом плане задача формулируется следующим образом. Допустим у каждого входного образа (сигнала от цели) измеряется N признаков. Каждое множество из N признаков можно рассматривать как вектор X, называемый вектором признаков, или как точку в N-мерном пространстве признаков:
Задача распознавания образов или автоматической
классификации ставится следующим образом. Пусть наблюдается некоторая,
интересующая нас система, которая может находиться в одном из M
различных состояний: ω1, ω2,… ωM. Однако то состояние, в котором система находится
на момент наблюдения, нам не известно. Могут быть известны только вероятности
(априорные) нахождения системы в этих состояниях: Р(ω1), Р(ω2),…
Р(ωМ), причем  . Кроме того, мы можем измерять те или иные параметры системы : Х1,
Х2, …ХN.. Задача распознавания (различения, классификации)
заключается в том, что зная измеренные значения этих параметров, надо принять
решение о том, в каком состоянии находится система. Другими словами, необходимо
найти алгоритм работы автоматического устройства, которое при предъявлении ему
на вход измеренных значений параметров системы Х формировало бы на своем выходе
решение о состоянии, в котором находится система ω.
. Кроме того, мы можем измерять те или иные параметры системы : Х1,
Х2, …ХN.. Задача распознавания (различения, классификации)
заключается в том, что зная измеренные значения этих параметров, надо принять
решение о том, в каком состоянии находится система. Другими словами, необходимо
найти алгоритм работы автоматического устройства, которое при предъявлении ему
на вход измеренных значений параметров системы Х формировало бы на своем выходе
решение о состоянии, в котором находится система ω.
Решение задачи распознавания во многом определяется априорной информацией относительно исследуемой системы и условий ее наблюдения.
Механизм случайности, который формирует вектор наблюдения Х, приводит к тому, что любое решение, которое мы принимаем, может оказаться ошибочным. Поэтому все, что мы можем сделать, это попытаться построить устройство принятия решений минимизирующее, в том или ином смысле, возможность принятия таких неправильных решений.
Существует несколько математических подходов к решению этой задачи. Наиболее последовательным и наиболее общим является байесовский подход. Если он может быть реализован, то он обеспечивает наилучший результат (минимум среднего риска), который может быть получен на основании имеющейся у нас информации. К сожалению условия распознавания чаще всего недостаточны для построения байесовского оптимального алгоритма, поскольку чаще всего неизвестны априорные вероятности Р(ω1), Р(ω2),… Р(ωМ).
Тем не менее, в теории распознавания образов было предложено много подходов к решению задач классификации при том или ином, неполном объеме априорной информации. Если попытаться коротко охарактеризовать все эти подходы и предлагаемые при этом алгоритмы, то все они сводятся к следующему. Пусть нам задана априорная информация об условиях распознавания в том или ином объеме, но в любом случае недостаточном для построения байесовского оптимального алгоритма. Тогда задача заключается в том, чтобы найти такие правила классификации которые, во-первых, опирались бы только на эту априорную информацию и во-вторых, давали бы решение задачи распознавания, по возможности, наилучшее среди всех других правил, опирающихся на тот же самый объем априорных данных [20, 21].
Существует еще одна группа методов распознавания, которая не требует знания плотностей вероятности. Это классификация образов по критерию минимума расстояния. Так в некоторых случаях образы любого из рассматриваемых классов проявляют тенденцию к тесной группировке вокруг некоторого образа, являющегося типичным или репрезентативным для соответствующего класса. При решении задач обнаружения в качестве такого типичного образа могут быть, например, взяты образы танка, орудия, джипа и тому подобных объектов.
Итак, имеем М классов и пусть эти классы допускают представление с помощью эталонных образов: z1, z2, …zM. Евклидово расстояние между произвольным вектором образа Х и i-ым эталоном определяется следующим выражением:
![]() , где Т – символ
транспонирования матрицы.
, где Т – символ
транспонирования матрицы.
Классификатор, построенный по принципу минимума расстояния, вычисляет расстояние, отделяющее неклассифицированный образ Х от эталона каждого класса и зачисляет этот образ в класс, оказавшийся ближайшим к нему. Другими словами, образ Х приписывается к классу zi, если условие Di < Dj выполняется для всех j≠i. Случаи равенства расстояний разрешаются произвольным образом.
Практическим препятствием применения классификации методами минимизации расстояния является то обстоятельство, что для достижения заданных границ качества классификации необходимо сохранять в памяти большое число образов, о которых известна принадлежность их некоторому классу. Кроме того, при осуществлении классификации необходимо вычислять расстояния между каждым классифицируемым образом и всеми образами, хранящимися в памяти системы.
Поэтому, к сожалению, кроме математических трудностей решения задачи распознавания возникают еще и практические, поскольку в этом случае РЛС надо снабдить высокопроизводительным вычислительным устройством – «мозгом» как для обработки поступающей информации, так и для принятия решения, сопоставляя в соответствии со специальными алгоритмами предварительные данные об объектах, заложенные в память (банк данных) и текущую информацию с РЛС. Сложность решения задачи распознавания объектов усугубляется еще и тем, что анализ информации проводится не в статическом, а в напряженном динамическом режиме и при остром дефиците времени. Изображения целей должны обрабатываться системой при непрерывно меняющихся ракурсах и масштабах, на различных подстилающих фонах. Все это может привести к необходимости применения компьютеров с несравненно большим быстродействием, чем у современных устройств.
Таким образом, система распознавания пока не относится к списку первоочередных задач, возникающих при создании РЛС. На более позднем этапе для создания такой системы целесообразно будет привлечь специализированную организацию. Так РУП «КБ Радар» (Белоруссия) [22] производит разработку алгоритмов и систем распознавания классов целей для любых существующих и перспективных радиолокаторов. Разрабатываемые этим КБ системы радиолокационного распознавания предназначены для автоматического распознавания классов обнаруженных или сопровождаемых целей на основании детального анализа отраженных от них радиолокационных сигналов.
Литература
1. Баранов Н.А., Быстров Р.П., Гвоздев А.Е., Корниенко В.Н., Пожидаев В.Н., Немцов А.В. Возможности и особенности применения терагерцового диапазона волн в высокоточных системах наведения. Монография. // Типография ФГКУ 3 ЦНИИ М.О России, 2013. - 357 с.
2. Кинев Николай Вадимович. Генерация и прием ТГц излучения использованием сверхпроводниковых интегральных устройств. Диссертации на соискание ученой степени кандидата физико-математических наук. // ИРЭ им. В.А. Котельникова РАН, Москва 2012.
3. Разработка и применение технологий ТГц- диапазона (Пер. Ломако А.А., ВИНИТИ РАН) MillitaryTechnology. - 2010. – 34. –P.16-19.
4. Ландсберг Г.С. Оптика. - М.:ФИЗМАТЛИТ, 2003. - 848 с.
5. Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. М. Сов. радио, 1970.
19. Дуда Р., Харт П. Распознавание образов и анализ сцен. М. "Мир", 1976.
20. Ту Дж., Гонсалес Р. Принципы распознавания образов. М. "Мир", 1978.
21. Фукунага К. Введение в статистическую теорию распознавания образов. М. "Наука", 1979.
22. КБ Радар. Системы радиолокационного распознавания [электронный ресурс]. URL: http://www.kbradar.by/text/pages-view-15.html.