ФАКТОРЫ ИЗМЕНЧИВОСТИ ИНТЕНСИВНОСТИ ПРИНИМАЕМОГО СИГНАЛА В СЕТЯХ IEEE 802.15.4 И ИХ ВЛИЯНИЕ НА ТОЧНОСТЬ ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ
В. Е. Анциперов1, О. В. Евсеев2, Г. К. Мансуров1, А. В. Поникар2
1 Институт радиотехники и электроники им. В. А. Котельникова РАН
2 Московский физико-технический институт (государственный университет)
Получена 7 июня 2011 г.
Аннотация.. Изложены результаты исследования влияния многолучевого распространения сигнала на точность позиционирования в закрытых помещениях по мощности принимаемого радиосигнала в беспроводных сетях стандарта IEEE 802.15.4. Приведены экспериментальные данные и результаты численного моделирования, полученные для простой геометрии помещений.
Ключевые слова: системы локального позиционирования, беспроводные сети, ZigBee, RSS.
Abstract. The results of local positioning by means of received signal strength value detection in wireless nets of IEEE 802.15.4 type are presented. The main attention is devoted to the problem of positioning inaccuracy depend on multipath signal propagation. The comparison of real experiment measurements and numerical simulation data are in the center of discussion.
Keywords: Local Positioning Systems (LPS), wireless (sensor) networks, ZigBee, RSS.
В настоящее время Система глобального позиционирования (GPS) получила широкое распространение, и сфера ее применений постоянно растет. Главное достоинство GPS – точные оценки местоположения и скорости подвижных объектов.
Однако, у глобальных систем позиционирования есть существенный недостаток – они не работают в закрытых помещениях. Этот недостаток призваны устранить системы локального позиционирования (Local Positioning Systems – LPS).
Система локального позиционирования на основе беспроводных сетей представляет собой ряд закрепленных, стационарных узлов, а так же мобильные узлы, являющиеся подвижными объектами, координаты которых необходимо определить. Решение о координатах объектов принимается на основе некоторых параметров сигналов, которыми обмениваются объекты и стационарные узлы.
Обычно системы локального позиционирования классифицируют по параметрам радиосигналов, которые используются для вычисления координат мобильных узлов. Существует три основных метода измерений: TOA (или TDOA), AOA и RSS.
В системах TOA (Time Of Arrival) и TDOA (Time Difference Of Arrival) полагаются на точность измерения времен отправки сигнала с передатчика и получения сигнала на приемнике (или их разнице соответственно), чтобы, используя измеренные задержки времени распространения сигнала, рассчитать расстояние между передатчиком и приемником. Таким образом, системы TOA требуют очень точной синхронизации часов отправителя и получателя. Метод TDOA более практичен, так как не требуют синхронизации часов.
В системах AOA (Angle of Arrival) координаты мобильных станций рассчитываются по гониометрии. С помощью направленных антенн или набора антенн измеряется угол прихода сигнала относительно узлов с известными координатами. По измеренным направлениям от нескольких антенн вычисляется координаты подвижного объекта.
Точность этого подхода ограничивается возможными направлениями измеряемой апертуры, так как может происходить затенение сигнала, а так же из-за многолучевых отражений сигнал может приходить с неверных направлений.
В системах RSS решение о координатах объектов принимается на основе анализа силы принимаемого сигнала RSS (received-signal strength). Одним из используемых методов локализации в таких сетях является Fingerprinting или локализация по шаблону. В данном методе выполняется поиск по шаблону на соответствие текущей силы сигнала имеющейся в калибровочной базе данных [1].
Альтернативой методу Fingerprinting выступают различные математические алгоритмы, нацеленные на минимизацию соответствия снимаемых данных RSS модели распространения сигнала [2-3]. Очевидно, что точность данных методов в значительной степени зависит от точности построения модели распространения сигнала. Поэтому необходимо тщательно исследовать факторы, способствующие большой изменчивости интенсивности принимаемого сигнала.
Основным достоинством беспроводных систем позиционирования в помещении является возможность организации системы как дополнительной опции в уже развернутой сети.
На сегодняшний день, для создания реальных систем позиционирования разработаны и доступны к применению, как ряд беспроводных стандартов, так и соответствующая элементная база. Одним из таких стандартов является IEEE 802.15.4.
IEEE 802.15.4 - стандарт, который определяет физический уровень и управление доступом к среде для беспроводных сетей с малым энергопотреблением и низкой стоимостью конечных устройств. Стандарт 802.15.4 - основа для протокола ZigBee, который в свою очередь, пытается предложить верхние уровни сети, которые не регламентируются стандартом. Протокол ZigBee может быть реализован, в частности, на беспроводных приемо-передатчиках XBee™. MaxStream™ XBee™ - малогабаритный модуль стандарта IEEE 802.15.4, предназначенный для построения беспроводных сетей. Модули содержат встроенный протокол пакетной передачи данных с проверкой целостности передаваемых данных. В приемниках XBee™ доступна индикация интенсивности сигнала RSSI (Received-Signal Strength Indication) в кадре принимаемого пакета. Поэтому использование RSS для локализации в беспроводных сетях на передатчиках XBee™ не требует разработки специальных схемных дополнений. Величина RSS измеряется в дБм и определяется как
 , (1)
, (1)
где ![]() - мощность сигнала в мВт.
- мощность сигнала в мВт.
В целях исследования возможности позиционирования на основе силы принимаемого сигнала была построена сеть (рис. 1) приемо-передатчиков XBee™, основными элементами которой являются:
1. Объект, представленный мобильным узлом, передающий в эфир широковещательные пакеты, которые принимается ближайшими узлами. В пакете передается идентификатор текущей серии пакетов, используемый для усреднения RSS на сервере.
2. Ретранслятор - стационарный передатчик, анализирующий все пришедшие пакеты. При получении сообщения с сервера выполняется запрашиваемая сервером команда (переход в активный режим или режим сна). При получении пакета не от сервера узел формирует новый пакет для отправки на сервер, в котором содержится информация о первоначальном отправителе и силе полученного сигнала.
3. Сервер обрабатывает информацию о силе сигнала, полученного узлом от объекта, усредняя значение RSSI по всем пакетам в одной серии.
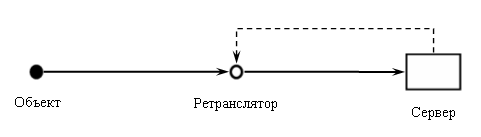
Рис. 1. Устройство сети.
С помощью этой сети были изначально отсняты данные RSSI при неподвижном приемнике и передатчике. Как видно из графика (рис. 2), значения RSSI далеко не постоянны, а варьируются в пределах интервала 10дБм. Если обратиться к описанию передатчиков, то, оказывается, что данные колебания соотносятся с ошибкой производителя. Но все же не стоит все эти колебания списывать на производителя. Как минимум, система не была изолирована от внешних радиопомех, и изменений при многолучевом проходе сигнала за счет передвижения исследователей и, возможно, некоторых колебаний самих датчиков.
Отметим, что при построении алгоритмов локального позиционирования целесообразно учитывать данные стационарных колебаний значения силы сигнала.
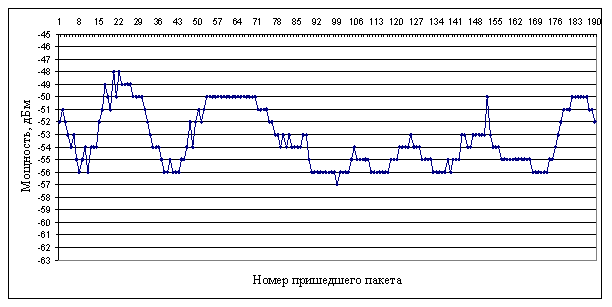
Рис. 2. Стабильность значения RSS во времени при неподвижном приемнике и передатчике.
Алгоритмы локального позиционирования на основе RSSI, не использующие Fingerprinting, моделируют распространение сигнала, сопоставляя значение RSSI с расстоянием от объекта до приемника. Наиболее широко распространенной является модель затухания:
где ![]() -
значение RSSI на расстоянии
-
значение RSSI на расстоянии ![]() ,
, ![]() -
значение RSSI на заданном расстоянии
-
значение RSSI на заданном расстоянии ![]() ,
, ![]() -
коэффициент затухания сигнала (приблизительно равен 2), а
-
коэффициент затухания сигнала (приблизительно равен 2), а ![]() - добавка, обусловленная внешними
факторами и имеющая, соответственно, случайный характер. Как правило,
- добавка, обусловленная внешними
факторами и имеющая, соответственно, случайный характер. Как правило, ![]() предполагается нормально распределенной
величиной [4-5].
предполагается нормально распределенной
величиной [4-5].
Однако, в проведенных
нами опытах обнаружено, что ![]() имеет неслучайный
характер.
имеет неслучайный
характер. ![]() достаточно стационарна по времени, а по
пространству
достаточно стационарна по времени, а по
пространству ![]() изменяется с достаточно регулярной
периодической составляющей. Была выдвинута гипотеза, что основной причиной
такого поведения является эффект замирания сигнала из-за многолучевого
распространения. Волны, испускаемые передатчиком, распространяются по различным
траекториям, испытывая отражения от стен, пола, потолков, мебели и т.д. В
итоге, в точке нахождения приемника волны интерферируют, и измеряется мощность
более сложной картины поля, нежели мощность при прямом распространении сигнала
(2).
изменяется с достаточно регулярной
периодической составляющей. Была выдвинута гипотеза, что основной причиной
такого поведения является эффект замирания сигнала из-за многолучевого
распространения. Волны, испускаемые передатчиком, распространяются по различным
траекториям, испытывая отражения от стен, пола, потолков, мебели и т.д. В
итоге, в точке нахождения приемника волны интерферируют, и измеряется мощность
более сложной картины поля, нежели мощность при прямом распространении сигнала
(2).
Для того чтобы более
точно описать флуктуации ![]() была построена модель
многолучевого распространения радиосигнала для простейшей геометрии помещения.
Данная модель описывает распространение радиосигнала в коридоре (прямоугольном
параллелепипеде), когда
приемник и источник сигнала находятся на линии параллельной оси коридора. Стены,
пол и потолок рассматриваются, как идеальные поверхности с некоторым
коэффициентом отражения. Поэтому для моделирования распространения применялся
метод мнимых источников. Поскольку длина коридора гораздо больше ширины и высоты, отражения
от торцевых стен не рассматриваются. Кроме того, не рассматриваются
многократные отражения.
была построена модель
многолучевого распространения радиосигнала для простейшей геометрии помещения.
Данная модель описывает распространение радиосигнала в коридоре (прямоугольном
параллелепипеде), когда
приемник и источник сигнала находятся на линии параллельной оси коридора. Стены,
пол и потолок рассматриваются, как идеальные поверхности с некоторым
коэффициентом отражения. Поэтому для моделирования распространения применялся
метод мнимых источников. Поскольку длина коридора гораздо больше ширины и высоты, отражения
от торцевых стен не рассматриваются. Кроме того, не рассматриваются
многократные отражения.
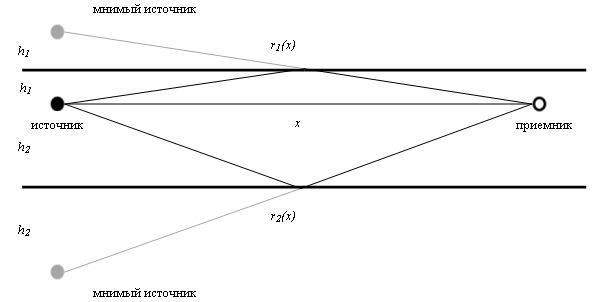
Рис. 3. Распространение сигнала в плоскости.
Все отражающие
поверхности в модели распространения были заменены мнимыми источниками сигнала,
распложенными симметрично относительно этих поверхностей (рис. 3). На рисунке
изображено расположение мнимых источников в горизонтальной плоскости на
расстоянии ![]() и
и ![]() от
стен, аналогично расположены мнимые источники в вертикальной плоскости, где
от
стен, аналогично расположены мнимые источники в вертикальной плоскости, где ![]() и
и ![]() -
расстояния от мнимых источников до пола и потолка соответственно. Тогда
расстояния от приемника до действительного источника:
-
расстояния от мнимых источников до пола и потолка соответственно. Тогда
расстояния от приемника до действительного источника: ![]() ,
до 4-х мнимых:
,
до 4-х мнимых: ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
Мощность в точке приема:
.
Мощность в точке приема:
![]() , (3)
, (3)
где ![]() –
принимаемый сигнал от действительного источника,
–
принимаемый сигнал от действительного источника, ![]()
![]() – принимаемые сигналы от мнимых источников,
– принимаемые сигналы от мнимых источников, ![]() – амплитуда, принимаемого
сигнала от действительного источника, k=2π/λ – волновое число,
– амплитуда, принимаемого
сигнала от действительного источника, k=2π/λ – волновое число, ![]() – длина волны излучаемого сигнала, K – коэффициент отражения.
– длина волны излучаемого сигнала, K – коэффициент отражения.
Для проверки соответствия модели был проведен следующий эксперимент. Приемник и источник сигнала были расположены на линии вдоль оси коридора на расстоянии 1.5 метра от стен, 0.2 м от пола и 4.6 м от потолка. Сервер располагался на некотором расстоянии от системы, чтобы не мешать распространению сигнала.
Первоначальное расстояние между приемником (узел) и источником сигнала (объект) составляло 15 см. Объект посылал широковещательные пакеты, узел, принимая их, выделял значения RSSI и отправлял данные о силе принятых сигналов на сервер, который сохранял усредненные для одного положения объекта значения RSS. Далее объект передвигали на 5 см от узла и сценарий повторялся. На основе собранных данных был получен график, представленный ниже (рис. 4). На этом же рисунке изображена модельная кривая со следующими значениями параметров: λ=0.125 м, K=0.21, A=10-3, h1=1.5 м, h2=1.5 м, h3=0.2 м, h1=4.6 м.
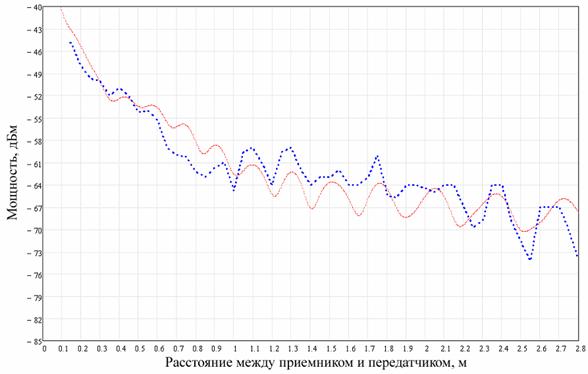
Рис. 4. Зависимость RSS от расстояния. Сплошная линия – модель, пунктирная – эксперимент.
Сравнение экспериментальных и модельных данных обнаруживает сходство зависимостей. Полного совпадения нет по тем причинам, что реальная обстановка отличалась от простейшей геометрической модели помещения, стены которой, к тому же, предполагались идеально ровными однородными отражающими поверхностями. Кроме того, в расчетах принимался во внимание только однократно отраженный сигнал, а измерительный стенд не был изолирован от внешних помех. Тем не менее, видно, что модель грубо удовлетворяет экспериментальным данным.
Таким образом, подводя итоги исследования, можно заключить, что основной причиной отличия значений RSSI, полученных экспериментально, от модели прямого распространения сигнала (2) является эффект замирания сигнала из-за многолучевого распространения. Влияние этого эффекта необходимо учитывать при построении алгоритмов позиционирования в помещениях по значениям RSS.
Литература
1. K. Kaemarungsi, "Design of Indoor positioning system based on location fingerprint technique". University of Pittsburgh, 2005.
2. G. V. Záruba, M. Huber, F. A. Kamangar and I. Chlamtac, "Indoor location tracking using RSSI readings from a single Wi-Fi access point", 2006.
3. R. Zemek, D. Anzai, S. Hara, K. Yanagihara, K. Kitayama, "RSSI-based Localization without a Prior Knowledge of Channel Model Parameters", 2008.
4. Henar Martín, Paula Tarrío, Ana M. Bernardos, and José R. Casar , "Experimental Evaluation of Channel Modelling and Fingerprinting Localization Techniques for Sensor Networks", 2009.
5. Dimitrios Lymberopoulos, Quentin Lindsey, and Andreas Savvides, "An Empirical Characterization of Radio Signal Strength Variability in 3-D IEEE 802.15.4 Networks Using Monopole Antennas", 2006