Комплексирование радиолокационной системы подповерхностного зондирования для повышения информативности и улучшения результатов измерения путем модификации приемного тракта георадара
Одсурэн Бухцоож
Московский Энергетический Институт (Технический Университет)
Получена 7 мая 2010 г.
Аннотация. В данной работе рассмотрен вопрос о комплексировании радиолокационной системы подповерхностного зондирования путем включения в приемный тракт георадара радиометрического приемника, чтобы улучшить точность измерений, определив с помощью радиометра электрофизические параметры верхних слоев грунта.
Ключевые слова: подповерхностное зондирование, георадар, радиометр, электрофизические параметры, комплексирование
В последние годы интерес к радиолокационному подповерхностному зондированию (РПЗ) земных покровов и область его применения значительно возрастает, что обусловлено, как важностью применения РПЗ в различных отраслях, так и технологическими достижениями в области обработки сигналов и электронных технологий. Значительное число публикаций и монографий, посвященных дистанционному подповерхностному зондированию и созданию серийных георадиолокаторов, как в России, так и в зарубежных странах показывают [1-4], что теория и техника РПЗ достигли серьезного уровня развития.
Главные тенденции РЛС подповерхностного зондирования – качественное повышение информативности и достоверности интерпретации радиоизображений подповерхностных сред и объектов, сокращение времени мониторинга, исследование и внедрение новых технологий, касающихся как алгоритмов реконструкций и совершенствования программного комплекса, так и аппаратуры георадаров. Увеличение информативности при обработке первичной информации можно производить оптимальным выбором длин волн, поляризации, углов наклона, предварительным сбором, и накоплением информации и комплексированием [5]. При подповерхностном зондировании длина волны и поляризация выбираются исходя из условий зондирования, и можно выбрать их оптимальное значение в зависимости от решаемых задач.
Информация, полученная в результате зондирования, представляется двухмерной картиной с указанием границ слоев, но при этом электрофизические параметры многослойных структур, характеризующие фактуру материала слоев, не определяются. В некоторых случаях работа георадара ограничивается лишь обнаружением. Причиной отмеченных недостатков является то, что при разработке большое внимание уделялось схемотехническим решениям, вопросы информационного плана не нашли должного развития и остаются одной из главных тенденций дальнейшего исследования [2, 6].
Большое погонное затухание в грунте, обусловленное конечной проводимостью диэлектрика (в радиодиапазоне земной покров является диэлектриком), определяет тип зондирующего сигнала, и тем самым структуру георадара. Затухание зондирующего сигнала в грунте требовало уменьшить частоту сигнала до метрового диапазона, что ухудшило бы разрешающую способность георадара по глубине, а цели подповерхностной радиолокации (толщина слоев, или объекты в грунте) могут иметь малые размеры. Использование сверхширокополосных (СШП) сигналов позволило устранить вышеуказанные трудности [1-3]. Использование СШП сигналов в качестве зондирующего сигнала определило архитектуру георадаров, особенности их блоков, а также методов проведения измерений и результатов обработки. В настоящее время импульсные георадары нашли наибольшее применение в силу их большей научно-технической проработанности [2]. Георадары с ЛЧМ (линейная частотная модуляция) сигналом интересны тем, что они не требует высокой мощности от передатчика при достаточно высоком энергетическом потенциале [7].
В данной работе
предлагается комплексирование георадара с радиометром путем модификации
приемного тракта и включением в него дополнительного радиометрического канала,
при этом рассматривается георадар с ЛЧМ сигналом. Диапазон частот 400 ….. 800 МГц,
георадар находится непосредственно над поверхностью Земли на высоте ![]() , не превышающей 5-10 см.
, не превышающей 5-10 см.
Измерение толщины слоя или глубины залегания объекта (далее глубина залегания цели) в грунте георадаром с ЛЧМ сигналом осуществляется определением частоты биения между зондирующим и отраженным сигналами
 , (1)
, (1)
где ![]() - ширина спектра,
- ширина спектра, ![]() - частота модуляции,
- частота модуляции, ![]() - скорость света,
- скорость света, ![]() - глубина залегания цели,
- глубина залегания цели,
![]() - комплексная
диэлектрическая проницаемость грунта (КДП).
- комплексная
диэлектрическая проницаемость грунта (КДП).
Из (1) очевидно, что для точного определения глубины залегания цели в грунте нужны сведения о КДП грунта. Но ситуация усложняется тем, что грунт – многокомпонентная система, электрофизические параметры которой не только зависят от его состава, но и варьируются в зависимости от его плотности (особенно для сухих почв), температуры, влажности, частоты зондирующего сигнала и т.д.
Частотная зависимость КДП описывается с помощью формулы Дебая [1].
 ,
(2)
,
(2)
где ![]() - высокочастотное значение при частоте
много большей, чем центральная частота спектра
- высокочастотное значение при частоте
много большей, чем центральная частота спектра ![]() ,
, ![]() - статическое значение при
- статическое значение при ![]() , параметр
, параметр ![]() изменяется по закону
изменяется по закону ![]() , где
, где ![]() - абсолютная температура,
- абсолютная температура,
![]() и
и ![]() определяются видом
молекул вещества.
определяются видом
молекул вещества.
Если почва сухая, то ее КДП, в основном, определяется плотностью грунта. Но если влажная, то КДП зависит от объема влаги в ней и определяется как для многокомпонентной среды. Точного способа определения КДП на сегодня не существует [8].
Имеются некоторые формулы, установленные эмпирическим путем [1], например, для двухкомпонентной смеси (почва и вода) хорошо подходит так называемая рефракционная формула:
![]() ,
(3)
,
(3)
где ![]() - часть полного объема,
занятого, например почвой (
- часть полного объема,
занятого, например почвой (![]() ), а
), а ![]() - часть полного объема, занятого
соответственно водой (
- часть полного объема, занятого
соответственно водой (![]() ).
).
Отсутствие априорного сведения о КДП грунта и ее зависимости
от многих внешних факторов могут привести к погрешности в определении глубины
залегания цели. Какова будет погрешность в определении глубины, посмотрим на
примере. Возьмем песок, у которого ![]() ,
, ![]() (истинное значение);
(истинное значение); ![]() ,
, ![]() (выбранное значение), где
(выбранное значение), где ![]() - влажность в %.
- влажность в %.
 ,
,
Спектры отраженных
сигналов от нижних границ без учета коэффициента отражения и затухания в грунте
при ![]() (для
наглядности) приведены на рис. 1.
(для
наглядности) приведены на рис. 1.
Если неизвестны
характеристики грунта и выбрано значение ![]() как истинное значение диэлектрической
проницаемости грунта, то возникает погрешность определении глубины залегания цели, что показано
на рис. 1. Расчетные значения
как истинное значение диэлектрической
проницаемости грунта, то возникает погрешность определении глубины залегания цели, что показано
на рис. 1. Расчетные значения ![]() ,
, ![]() . Погрешность в определении глубины залегания
цели 0,5м.
. Погрешность в определении глубины залегания
цели 0,5м.
Рис. 1. Спектры отраженных сигналов
от нижних границ слоя с различными ![]() .
.
Из рис.1 очевидно, что если заранее неизвестны характеристики грунта, то возможны погрешности при определении глубины залегания цели или толщины слоя грунта. Следовательно, для повышения точности измерений георадаром необходимы априорные данные об электрофизических характеристиках грунта.
Существуют лабораторные методы по исследованию КДП, но их применение ограничено из-за суточного и сезонного изменения диэлектрической проницаемости и физического состояния почвы [9-11].
Приведенные на рис. 2 суточные и сезонные зависимости
показывают, что для достоверного результата по измерению глубины залегания цели
нужны сведения о состоянии грунта в момент работы георадара. Повышение влажности
грунта приводит к увеличению действительной и мнимой части КДП, тем самым,
уменьшив яркостную температуру (рис. 2а). При снижении температуры для мерзлого
грунта процесс льдообразования ускоряется и начиная с ![]() значения КДП практически не
меняются (рис. 2б). Диэлектрическая проницаемость влажных почв, в основном,
определяется объемным содержанием воды в грунте. Различные значения
значения КДП практически не
меняются (рис. 2б). Диэлектрическая проницаемость влажных почв, в основном,
определяется объемным содержанием воды в грунте. Различные значения ![]() при положительной
температуре объясняется тем, что с ростом влажности грунта занимаемый объем
свободной воды увеличивается, и значение диэлектрической проницаемости резко
растет. Если еще учесть большое разнообразие земной поверхности и границ отдельных
слоев в грунте, становится очевидной сложность зондирования земных покровов.
при положительной
температуре объясняется тем, что с ростом влажности грунта занимаемый объем
свободной воды увеличивается, и значение диэлектрической проницаемости резко
растет. Если еще учесть большое разнообразие земной поверхности и границ отдельных
слоев в грунте, становится очевидной сложность зондирования земных покровов.
Рис. 2. а) График зависимости яркостной температуры почвы вдоль перемещения носителя с радиометром, б) зависимость действительной части комплексной диэлектрической проницаемости глины от температуры при различной весовой влажности: 1 – W-0%, 2 – W=3,9%, 3 – W=9%, 4 – W=14,6%.
Степень
радиоизлучения земли и излучательная способность зависит от диэлектрической
проницаемости, характеризуемой радиояркостной температурой ![]() [8, 9,
11, 12].
[8, 9,
11, 12].
![]() , (4)
, (4)
где ![]() - термодинамическая температура
среды,
- термодинамическая температура
среды, ![]() - излучательная способность (ИСП)
земного покрова
- излучательная способность (ИСП)
земного покрова
 .
.
Тогда,
измерив радиояркостную температуру, можно было бы найти комплексную
диэлектрическую проницаемость, но задача усложняется тем, что тепловое
излучение земных покровов формируется в слое почв. Эффективная излучающая глубина
слоя (скин-слой ![]() )
определяется как величина, обратная коэффициенту поглощения и при вертикальном
наблюдении глубина зондирования может составлять несколько скин-слоев (в случае
сухого грунта). При этом в формировании радиотепловых сигналов существенную
роль играют как неоднородности внутренней структуры, связанные с распределением
влаги, так и вертикальные градиенты температуры в излучающем слое.
)
определяется как величина, обратная коэффициенту поглощения и при вертикальном
наблюдении глубина зондирования может составлять несколько скин-слоев (в случае
сухого грунта). При этом в формировании радиотепловых сигналов существенную
роль играют как неоднородности внутренней структуры, связанные с распределением
влаги, так и вертикальные градиенты температуры в излучающем слое.
Например, для однородной среды с гладкой и шероховатой поверхностью при наличии вертикального температурного градиента яркостная температура излучения на границе поверхность – воздух:
 , (5)
, (5)
где ![]() - коэффициент отражения
зависит от поляризации и угла
- коэффициент отражения
зависит от поляризации и угла ![]() , под которым наблюдается излучение среды;
, под которым наблюдается излучение среды; ![]() значение угла
значение угла ![]() в излучающей среде (связаны
между собой с законом Снеллиуса);
в излучающей среде (связаны
между собой с законом Снеллиуса); ![]() - температура на глубине
- температура на глубине ![]() ;
; ![]() - погонный коэффициент поглощения
по мощности в среде.
- погонный коэффициент поглощения
по мощности в среде.
Для вертикального визирования, из (5), учитывая, что ![]() , получим
, получим
 (6)
(6)
Излучения дециметрового диапазона длин волн могут наблюдаться с довольно значительной глубины. Тогда яркостная температура излучения будет зависеть не только от свойств верхних слоев, но и от свойств более глубоких слоев грунта (см. рис. 3).
Рис. 3. Простая модель слоистой среды.
Во многих практически важных случаях применения георадаров
среда распространения сигналов может быть описана моделью в виде многослойного
диэлектрика с различными значениями комплексных диэлектрических проницаемостей.
Считая, что в среде имеется только вертикальная неоднородность комплексной
диэлектрической проницаемости можно построить различные электродинамические
модели ![]() ,
например, ступенчатая, линейная, линейная в переходном слое (кусочно-линейная),
экспоненциальная в переходном слое. Для описания вертикальных профилей
комплексной диэлектрической проницаемости в зависимости от выбранной модели могут
быть использованы различные аналитические функции.
,
например, ступенчатая, линейная, линейная в переходном слое (кусочно-линейная),
экспоненциальная в переходном слое. Для описания вертикальных профилей
комплексной диэлектрической проницаемости в зависимости от выбранной модели могут
быть использованы различные аналитические функции.
КДП, можем приближенно оценить, задаваясь допустимой погрешностью по определению глубины залегания цели.
Плавные переходы (экспоненциальный
переход) оказывают согласующее действие, что приводит к уменьшению отражений на
границах [13]. Отражение от плавного переходного слоя на границе верхний слой –
однородное полупространство заметно лишь при относительной толщине слоя ![]() . Для модели с
экспоненционально меняющейся диэлектрической проницаемостью достигается почти
полное отсутствие отражений при толщине переходного слоя, превышающей половину
длины волны. Тогда, задавая допустимую погрешность определения глубины цели равную
10…12 см, найдем значение допустимой ошибки по определению
. Для модели с
экспоненционально меняющейся диэлектрической проницаемостью достигается почти
полное отсутствие отражений при толщине переходного слоя, превышающей половину
длины волны. Тогда, задавая допустимую погрешность определения глубины цели равную
10…12 см, найдем значение допустимой ошибки по определению ![]() , табл. 1.
, табл. 1.
Таблица 1
Зависимость погрешности определения
глубины цели от изменения значений ![]()
|
Параметр |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
3-0,03i W=0-1% |
4-0,045i |
4,5-0,06i |
5-0,075i, W=4%,
|
5,5-0,09i |
6-0,12i |
6,5-0,21i, W=6 % |
|
|
1,291м |
1,118м |
1,054м |
1м, |
0,953м |
0,913м |
0,877м |
|
|
3,6-0,24i |
4,1-0,27i |
4,6-0,3i |
5,1-0,39i, W=10%
|
5,6-0,599i |
6,1-0,74i |
6,6-1,04i |
|
|
1,191м |
1,116м |
1,053м |
1м,
|
0,954м |
0,913м |
0,877м |
|
|
6-1,499i |
6,5-1,79i |
7-2,098i |
7,5-2,39i, W=8%
|
8-2,698i |
8,5-2,997i |
9-3,297i |
|
|
1,123м |
1,077м |
1,036м |
1м, |
0,967м |
0,937м |
0,909м |
|
|
8,7-0,18i |
9,7-0,24i |
10,2-0,27i |
10,7-0,3i, W=12%
|
11,2-0,59i |
11,7-0,89i |
12,7-1,49i |
|
|
1,109м |
1,05м |
1,024м |
1м,
|
0,977м |
0,956м |
0,916м |
Истинное значение ![]() для каждого типа грунта
соответствует колонке 4, а в колонках 1, 2, 3, 5, 6, 7 – варьируемое
относительно истинного значение
для каждого типа грунта
соответствует колонке 4, а в колонках 1, 2, 3, 5, 6, 7 – варьируемое
относительно истинного значение ![]() ;
; ![]() - песок W=4%,
- песок W=4%, ![]() - суглинок W=10%,
- суглинок W=10%, ![]() - глина W=8%,
- глина W=8%, ![]() - песок W=12%
- песок W=12%
Из табл. 1 видно, что
при изменении значения ![]() на
на ![]() 20% (выделенно темным цветом) погрешность
по определению толщины слоя грунта соответствует допустимому значению, т.е. 10…12
см.
20% (выделенно темным цветом) погрешность
по определению толщины слоя грунта соответствует допустимому значению, т.е. 10…12
см.
Найдем изменение
радиояркостной температуры излучения грунта, соответствующего ступенчатой
электродинамической модели с учетом изменения значений ![]() (см. табл. 1). Считая термодинамическую
температуру излучающего слоя одинаковой и равной 300К.
(см. табл. 1). Считая термодинамическую
температуру излучающего слоя одинаковой и равной 300К.
Электродинамическая модель грунта ступенчатого типа
 (7)
(7)
Зависимость характеристик грунта: погонного коэффициента поглощения, ИСП, толщины скин-слоя и радиояркостной температуры от значений КДП ступенчатой модели приведены в табл. 2.
Таблица 2
Электрофизические характеристики грунта
|
Значения комплексной диэлектрической проницаемости слоев |
|
|
|
|
|
Варьируемое значение |
1,13 |
0,886 |
0,885 |
265,75 |
|
Истинное значение |
2,104 |
0,854 |
0,475 |
256,10 |
|
Варьируемое значение |
3,684 |
0,823 |
0,271 |
247,00 |
Разброс значений яркостной
температуры из-за вариации значения диэлектрической проницаемости для данной
модели соответствует примерно ![]() 9К. При таком значении разброса температур
достаточна чувствительность радиометра 0,5-0,7К.
9К. При таком значении разброса температур
достаточна чувствительность радиометра 0,5-0,7К.
Неизвестность вертикального профиля диэлектрической проницаемости грунта может привести к сложности при выборе нужной модели.
Для определения
местоположения подповерхностных целей и интерпретации результатов измерений, после
их обработки строится радиолокационный профиль. Целью интерпретации данных в
самом общем виде является либо детальное расчленение разреза, либо поиск или
обнаружение разнообразных объектов. На рис. 4 представлена схема формирования
радиолокационного профиля. Пусть антенная система (в виде передающей антенны ![]() и приемной антенны
и приемной антенны ![]() ) находится на земной
поверхности. Если принять, что обе антенны совмещаются в точке А, то
расстояние антенна – цель до сосредоточенной цели Ц будет
) находится на земной
поверхности. Если принять, что обе антенны совмещаются в точке А, то
расстояние антенна – цель до сосредоточенной цели Ц будет ![]() , где
, где ![]() горизонтальная
составляющая дальности до цели,
горизонтальная
составляющая дальности до цели, ![]() - ее глубина.
- ее глубина.
Если такая антенная
система А перемещается вдоль координаты ![]() , то при растворе луча антенны
, то при растворе луча антенны ![]() (в среде) отрезок пути
(в среде) отрезок пути ![]() , дважды проходимый сигналом,
будет изменяться от
, дважды проходимый сигналом,
будет изменяться от ![]() .
При этом время запаздывания
.
При этом время запаздывания ![]() сигнала от цели определяется выражением
сигнала от цели определяется выражением
 (8)
(8)
где ![]() - фазовая скорость волны в грунте.
- фазовая скорость волны в грунте.
Рис. 4. Диаграмма формирования радиолокационного профиля при перемещении антенны вдоль поверхности.
Для точечной цели, как
видно из (8), профиль имеет вид отрезка одной ветви гиперболы. Если же кроме
точечной цели на глубине ![]() имеется еще плоская граница раздела в
среде (которой соответствует скачек
имеется еще плоская граница раздела в
среде (которой соответствует скачек ![]() ) на глубине
) на глубине ![]() , то в результате на радиолокационном
профиле образуется сплошная линия.
, то в результате на радиолокационном
профиле образуется сплошная линия.
Восстановление профиля слоистой среды может быть осуществлено с погрешностью вследствие неточного определения электрофизических характеристик среды.
На рис. 5 показан экспериментально полученный радиолокационный профиль в случае прохода георадара над диэлектрическим и металлическим объектоми.
Рис. 5. Подповерхностный профиль при проходе над объектами TS – 2.5, TS – 6.1 – трубы: а) в виде скан-линий, б) изображения в псевдоцвете [2].
Зная вертикальная неоднородность структуры почвы, можно выбрать подходящую модель грунта и уточнить результаты измерения. Таким образом, совместное использование активного и пассивного метода дистанционного зондирования земли дополняют друг друга.
Реализация совмещения пассивного и активного каналов измерения может быть осуществлена различными путями. Например, опыт использования активно-пассивного метода для картографирования подстилающей поверхности с летательного аппарата известен из [14].
В георадиолокации при использовании непрерывных сигналов активный и пассивный каналы не могут работать одновременно, поэтому пассивное и активное зондирование осуществляется поочередно.
А сходство широкополосной высокочастотной части приемного тракта георадара с ЛЧМ сигналом и радиометрического приемника позволяет совместить их (рис. 6), тем самым, позволяя повысить информативность георадара.
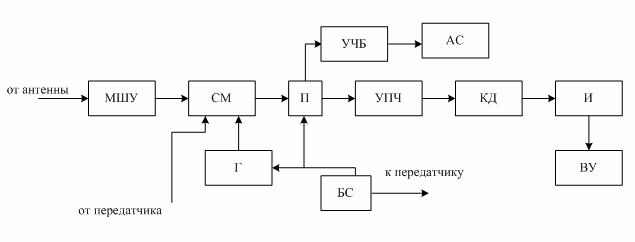
Рис. 6. Модификация приемного тракта георадара: МШУ – малошумящий усилитель, СМ – смеситель, П – переключатель, Г – гетеродин, УПЧ – усилитель промежуточной частоты, КД – квадратичный детектор, И – интегратор, УЧБ – усилитель частоты биения, АС – анализатор спектра, ВУ – выходное устройство, БС – блок синхронизации.
При пассивном режиме радиотепловое излучение от грунта смешивается с сигналом от гетеродина, а в активном режиме – с частью мощности зондирующего ЛЧМ сигнала от передатчика. Блок синхронизации управляет переключателем (П), который направляет сигнал либо на вход УПЧ (в пассивном режиме), либо на вход УЧБ (в активном режиме), также БС управляет работой приемо-передающего тракта.
Итак, в данной статье
приведена оценка возможной погрешности при определении глубины залегания цели в
грунте при георадиолокации из-за неточного знания ![]() среды, рассчитана допустимая погрешность
определения КДП грунта при заданной точности определения глубины нахождения
цели 10…12 см и предложено комплексирование приемного тракта георадара с
радиометрическим приемником. Точную оценку диэлектрической проницаемости грунта
получить невозможно [7], но ориентировочную оценку его электрофизических
параметров с помощью радиометрии получить реально и это повысит информативность
георадара.
среды, рассчитана допустимая погрешность
определения КДП грунта при заданной точности определения глубины нахождения
цели 10…12 см и предложено комплексирование приемного тракта георадара с
радиометрическим приемником. Точную оценку диэлектрической проницаемости грунта
получить невозможно [7], но ориентировочную оценку его электрофизических
параметров с помощью радиометрии получить реально и это повысит информативность
георадара.
Литература
1. Подповерхностная радиолокация/ М.И. Финкельштейн, В.И. Карпухин, В.А. Кутев, В.Н. Метелкин; под ред. М.И. Финкельштейна, - М.: Радио связь, 1994.
2. Вопросы подповерхностной радиолокации/ Коллективная монография/ под ред. А.Ю. Гринева. – М.: Радиотехника, 2005.
3. Daniels D. J. Surface Penetrating Radar. The Institution of Electrical Engineers, London, 1996.
4. URL: http://www.prometeus.nsc.ru/partner/zarubin/sonde.ssi. Подповерх-ностное зондирование (Отечественная библиография).
5. Информативность радиолокационных объектов, сигналов и систем. Нарышкин А.К. М.: МЭИ, 1993 – 98 с.
6. Б.А. Стрюков, В.В. Матвеев, В.Ю. Агапитов и др./ XXX Юбилейная Неделя науки СПбГТУ.Материалы межвузовской научной конференции. Ч.VI: С.49, 2002.
7. Сверхширокополосные системы в радиолокации и связи: Конспекты лекций/ В.И. Кошелев и др. – Муром: Издательско-полиграфический центр МИ ВлГУ, 2003. – 110 с.
8. А. М. Шутко СВЧ-радиометрия водной поверхности и почвогрунтов. М.: Наука, 1986
9. Радиолокационные методы исследования Земли/ Ю.А. Мельник, С.Г. Зубкович, В.Д. Степаненко и др. под ред. Ю.А. Мельника. – М.: Советское радио, 1980 – 264 с.
10. Ю. И. Лещанский, Г. Н. Лебедев, В. Д. Шумилин. Электрические параметры песчаного и глинистого грунта в диапазоне сантиметровых, дециметровых и метровых волн. – Изв. вузов. Радиофизика, 1971, т. 14 № 4, с. 561- 569.
11. Радиоизлучение Земли как планеты. А. Е. Башаринов, А. С. Гурвич, С. Т. Егоров – М.: Наука, 1974.
12. Устройств пассивного зондирования в СВЧ и ИК диапазонах. А. Е. Башаринов– М.: МЭИ, 1985 – 44 с.
13. Итоги науки и техники. Серия Радиотехника, М. 1978
14. В. К. Волосюк, В. Ф. Кравченко. Статистическая теория радиотехнических систем дистанционного зондирования и радиолокации — М.: Физматлит, 2008.