УДК. 621.396.67
ПРЕДЛОЖЕНИЯ ПО ТЕХНИЧЕСКОЙ РЕАЛИЗАЦИИ УСТРОЙСТВ
ШУМОВЫХ РЛС СО СПЕКТРАЛЬНОЙ ОБРАБОТКОЙ СИГНАЛОВ
Р. П. Быстров 1, В. Е. Кузьмичев 2, А. С. Романовский 3, С. А. Соколов 1,
Ю. В. Соколов 2, Л. В. Федорова 1
1 Институт радиотехники и электроники им. В.А. Котельникова РАН
2 3 Центральный научно исследовательский институт МО РФ
3 МГТУ им. Н.Э. Баумана
Статья получена 27 марта 2015 г.
Аннотация. Рассматриваются в сравнении методы спектральной и корреляционной обработки шумовых сигналов и делается их оценка применительно к шумовым РЛС (ШРЛС) обнаружения наземных объектов. Приводятся результаты моделирования процессов обнаружения и селекции объектов шумовыми РЛС, а также результаты лабораторных испытаний однокнальной и рециркулярной шумовых РЛС с последовательным спектральным анализом. Получены результаты натурных испытаний одноканальной и двухканальной ШРЛС на макете сантиметрового диапазона радиоволн. С использованием макета на длине волны 3 см проведена оценка дальности действия ШРЛС и других энергетических параметров. Обосновываются предложения по возможной реализации устройств обработки ШРЛС со спектральной обработкой сигналов.
Ключевые слова: обработка сигналов, шумовой сигнал, методы обработки, спектр сигнала, наземный объект, обнаружение объекта, корреляционный метод, спектральный метод, зондирующий сигнал, диапазон радиоволн, одноканальная РЛС, движущейся объект, эксперимент, гребенчатый фильтр, помехоустойчивость, линия задержки.
Abstract. This paper compared the methods of spectral and correlation methods of noise signal processing and made their assessment in relation to noise radar (NR) detection of ground objects. The paper represents the simulation results of processes of acquisition and object selection in noise radars, as well as the results of laboratory tests in single-channel and recirculating noise radar with sequential spectral analysis. The results of field tests with single-and dual NR are obtained on the layout in centimeter wavelengths. Using the layout at a wavelength of 3 cm the range of NR and other energy parameters are estimated. The proposals for possible implementation of the processing devices in NR with spectral signal processing, are justified.
Keywords: signal processing, noise signal, processing methods, object detection, correlation method, spectral method, single-channel radar system, comb filter, noise immunity, delay line.
Применительно к шумовому зондирующему сигналу РЛС в настоящее время могут быть использованы как корреляционный, так и спектральный методы их обработки.
Теоретические и практические вопросы, связанные с применением корреляционной обработки шумовых зондирующих сигналов, в достаточно полном объеме рассмотрены во многих работах [1-10]. Среди достоинств корреляционного метода обработки сигналов в этих работах отмечалось:
- возможность применения случайных шумовых сигналов, так как схема коррелятора не связана с конкретной формой сигнала;
- отсутствие неопределенности при одновременном измерении дальности и скорости движения целей;
- большой динамический диапазон измеряемой дальности;
- снижение требований к пиковой мощности передатчика при использовании сигналов с большой базой;
- возможность реализации высокой разрешающей способности по скорости и дальности при низкой скорости обработки данных и малом отношении сигнал/шум на входе;
- высокая помехоустойчивость и скрытность работы ШРЛС.
1. Корреляционный и спектральный методы обработки сигнала
Использование корреляционного метода обработки сигнала в PЛC позволяет оптимальным образом решать задачу обнаружения целей. В такой РЛС с точностью до постоянного коэффициента вычисляется значение функции взаимной корреляции между отраженным от цели и опорным (задержанным в линии задержки на время tз) сигналами. Полученный сигнал сравнивается с заданным порогом L0 . Порог обычно выбирается из условия обеспечения минимума вероятности пропуска цели при заданном значении вероятности ложной тревоги.
Основным недостатком аналоговой корреляционной обработки сигналов является необходимость применения многоканального (по дальности и доплеровской частоте) приемника ШРЛС. При использовании одного канала необходим последовательный просмотр всех элементов дальности и доплеровской частоты.
Спектральный метод обработки сигналов в тех же условиях позволяет получать такую же информацию о цели, как и корреляционный, однако имеет ряд преимуществ. В частности, он не требует применения СВЧ линий задержки и устройств перемножения сигналов [10].
Физические основы метода спектральной обработки сигнала (СОС) и вопросы, связанные с его практической реализацией в шумовых РЛС, рассматривались в ряде работ [7,11-15].
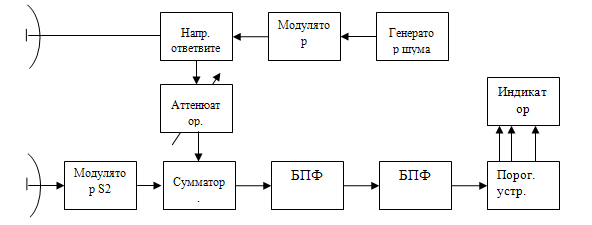
Упрощенная структурная схема известной ШРЛС с последовательной спектральной обработкой суммарного сигнала (одноканальная ШРЛС) приведена на рис. 1.
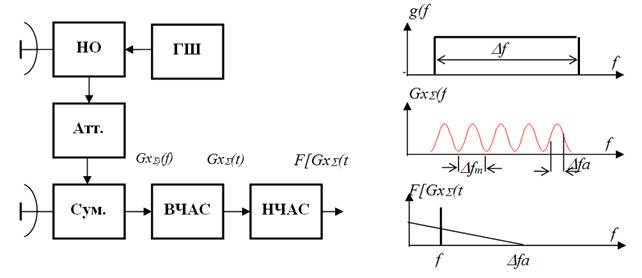
Рис. 1. Структурная схема известной ШРЛС с последовательной
спектральной обработкой суммарного сигнала (одноканальная ШРЛС)
ШРЛС содержит: генератор шума (ГШ), направленный ответвитель (НО), регулируемый аттенюатор (Атт), сумматор (Сум), высокочастотный анализатор спектра (ВЧАС), низкочастотный анализатор спектра (НЧАС), приемную и передающую антенны. НО подводится к передающей антенне, и излучение переходит в пространство. Часть сигнала x (t) (опорный сигнал) через аттенюатор Атт. поступает на один из входов сумматора Сум., на второй вход которого подается отраженный от цели сигнал.
Выражение для суммарного сигнала на выходе сумматора может быть представлено в виде
![]() ,
(1)
,
(1)
где x(t) и x(t-t) - соответственно опорный и отраженный от цели сигналы; n(t) - помеховый сигнал; a - отношение амплитуд опорного и отраженного сигналов; t - время задержки отраженного сигнала относительно опорного.
Здесь и в дальнейшем, если не будет оговорено, будем полагать, что x(t) и п(t) представляют собой независимые эргодические случайные процессы с нормальным распределением амплитуд и нулевым средним, а также имеют равномерные в полосе частот Df энергетические спектры со спектральными плотностями мощностей g0 и N0 .
Согласно теоремы Винера-Хинчина, выражение для энергетического спектра GxS(f) суммарного сигнала xS(t) (ЭССС) может быть записано в виде
 ,
(2)
,
(2)
где КxS (t) - корреляционная функция сигнала xS(t).
Учитывая, что корреляционная функция суммы случайных процессов может быть представлена в виде суммы авто и взаимно корреляционных функций слагаемых имеем
где g(f) и n(f) - энергетические спектры опорного и помехового сигналов соответственно.
Из выражения (3) видно, что огибающая ЭССС промодулирована по частоте. Частотный интервал между двумя соседними минимумами (максимумами) Dfm однозначно связан с дальностью до цели следующим соотношением:
![]()
где с - скорость распространения радиоволн; Dfm - период модуляции ЭССС, равный 1/τ .
Анализ огибающей ЭССС в такой ШРЛС осуществляется либо путем перестройки узкополосного фильтра в полосе анализируемых частот Df (последовательный спектральный анализ) [11,12,16], либо на основе использования набора узкополосных фильтров, перекрывающих полосу частот Df (параллельный спектральный анализ) [11].
Как в первом, так и во втором случаях для определения частотного интервала Dfm и, соответственно, дальности до обнаруженной цели R , сигнал с выхода ВЧАС (реализация ЭССС) подается на вход низкочастотного анализатора спектра.
При линейной перестройке узкополосного фильтра, входящего в состав ВЧАС, период модуляции огибающей ЭССС Dfm и частота модуляции в его реализации на выходе ВЧАС fm связаны отношением
где Та - время перестройки узкополосного фильтра ВЧАС в полосе частот Df.
Измерив значение fm, дальность до цели, можно определить R по формуле
Измерение fm целесообразно осуществлять с помощью набора параллельно включенных низкочастотных фильтров. При этом дальность до цели определяется по номеру фильтра, в котором сигнал превысил заданное пороговое значение.
Для оценки помехоустойчивости рассматриваемой ШРЛС воспользуемся методикой, в которой в качестве критерия используется отношение сигнал/шум на выходе низкочастотного фильтра (НЧФ) НЧАС, настроенного на частоту fm и согласованного со временем Та, при фиксированном значении отношения сигнал/шум на входе ШРЛС.
Будем полагать, что спектр излучаемого сигнала по ширине полосы частот и форме огибающей в каждый данный момент времени совпадает с полосой пропускания и формой огибающей амплитудно-частотной характеристики (АЧХ) узкополосного фильтра ВЧАС, а его перестройка осуществляется с такой скоростью, что потерями, обусловленными несовпадением средних частот излучаемого (опорного) и отраженного сигналов можно пренебречь.
Тогда, в случае использования ВЧАС с квадратичным двухполупериодным безинерционным детектором, выражение для напряжения на выходе НЧФ запишется в виде
 (4)
(4)
После преобразования получим
 (5)
(5)
Мощность сигнала на выходе НЧФ РНЧФcш найдем как сумму квадратов составляющих напряжения UНЧФ(Т).
Для количественной оценки Рнчф рассмотрим каждую из составляющих в отдельности. Учитывая, что НЧФ, настроенный на частоту fm¹ 0, подавляет постоянную составляющую входного сигнала и воспользовавшись данными, приведенными в [8,11,12], можно показать, что мощность полезного сигнала Рсо будет равна

Для количественной оценки Рнчф рассмотрим каждую из составляющих в отдельности. Учитывая, что НЧФ, настроенный на частоту fm¹ 0, подавляет постоянную составляющую входного сигнала и воспользовавшись данными, приведенными в [8,11,12], можно показать, что мощность полезного сигнала РСО будет равна

Мощности шумовых составляющих, обусловленных опорным – Рош , отраженным - РСш и помеховым - РПш сигналами, а также их взаимодействием, РПО и РПС могут быть найдены на основе использования следующих формул:
 ,
,  ,
,
 ,
,
 . (6)
. (6)
где: Εо, Ес и Еп - соответственно энергии опорного, отраженного и помехового сигналов; g0 и gс - спектральные плотности мощности опорного и отраженного сигналов; R(t) - коэффициент корреляции между опорным и отраженным сигналами; No – энергия шума.
При отсутствии цели сигнал на выходе сумматора можно записать в виде
![]() .
(7)
.
(7)
При этом напряжение и мощность сигнала на выходе HЧФ будут соответственно равны
 ,
(8)
,
(8)
![]() .
(9)
.
(9)
Отношение
сигнал/шум на выходе НЧФ ![]() найдем как отношение
приращения мощности сигнала при наличии цели к мощности сигнала при её отсутствии:
найдем как отношение
приращения мощности сигнала при наличии цели к мощности сигнала при её отсутствии:
 . (10)
. (10)
Подставив в (10) значения РНЧФсш (2.7) и РНЧФш (2.9), получим:
 ,
(11)
,
(11)
Произведя алгебраические преобразования и учитывая, что при Еп>>Ес и DfТа >>1 двумя последними членами в числителе можно пренебречь, выражение (11) можно переписать в виде:
 , (12)
, (12)
где g - отношение спектральных плотностей мощности опорного и помехового сигналов.
Из выражения (12) видно, что отношение сигнал/шум на выходе НЧФ в
ШРЛС с СОС зависит от отношения спектральных плотностей опорного и помехового
сигналов g и значения R(t). Максимальное значение ![]() принимает при g =1. При этом
принимает при g =1. При этом
 .
(13)
.
(13)
Значение R(t) при фиксированном t определяется полосой пропускания Dfa и формой амплитудно-частотной характеристики (АЧХ) перестраиваемого фильтра ВЧАС [16-18].
В [16] показано, что при прямоугольной огибающей
АЧХ перестраиваемого фильтра ВЧАС оптимальное значение  , при этом R2(t)= 0,623, а энергетический
проигрыш рассматриваемой ШРЛС по сравнению с ШРЛС с корреляционной обработкой
сигнала, составит ~ 6,82 дБ.
, при этом R2(t)= 0,623, а энергетический
проигрыш рассматриваемой ШРЛС по сравнению с ШРЛС с корреляционной обработкой
сигнала, составит ~ 6,82 дБ.
Данный результат получен в предположении, что спектр излучаемого сигнала согласован с полосой пропускания Dfа УПФ ВЧАС, а их перестройка производится синхронно во всей полосе анализируемых частот Df.
При одновременном излучении сигнала во всей полосе частот в ШРЛС с последовательной СОС будут возникать энергетические потери, обусловленные несогласованностью полос Dfa и Df , величина которых равна отношению Dfa / Df.
Тогда в общем случае выражение для можно представить в виде
 .
(14)
.
(14)
Из сравнения выражений (13) и (14) видно, что отношение сигнал/шум на выходе устройства обработки в ШРЛС с последовательной СОС при несогласованном излучении в Δfa /Δf раз меньше, чем при согласованном, что эквивалентно снижению чувствительности приемника ШРЛС в Δf /Δfa раз.
Однако с точки зрения помехоустойчивости обе рассматриваемые ШРЛС будут эквивалентны друг другу, так как при постановке противником помех во всей полосе частот излучаемого сигнала энергетические потери при несогласованном приеме (излучении) будут в одинаковой мере присущи как полезному, так и помеховому сигналам.
Учитывая, что  ,
выражение (3) можно переписать в виде
,
выражение (3) можно переписать в виде
 (15)
(15)
где ![]() - отношение мощностей полезного и помехового сигналов на
входе ШРЛС.
- отношение мощностей полезного и помехового сигналов на
входе ШРЛС.
Из выражения (15) видно, что коэффициент улучшения входного
отношения сигнал/шум в ШРЛС с последовательной спектральной обработкой пропорционален
произведению ![]() .
.
Учитывая, что при последовательном спектральном анализе время перестройки фильтра ВЧАС выбирается из условия
 ,
(16)
,
(16)
выражение (16) можно представить в виде
 ,
(17)
,
(17)
где К - коэффициент учитывающий скорость перестройки ВЧАС, равный
 .
.
Выражения (13), (14), (15) и (16) позволяют оценить помехоустойчивость и чувствительность ШРЛС с последовательной СОС. Для примера проведем оценку помехоустойчивости ШРЛС с дальностью действия 3 км и полосой рабочих частот Δf = 200 МГц.
Если УПФ ВЧАС имеет прямоугольную АЧХ, требуемое значение Δfа можно определить по формуле
 .
.
В нашем случае Δfа будет равна 18,5 кГц.
Пусть время анализа сигнала Та в рассматриваемой
ШРЛС равно времени облучения цели в РЛС типа СБР-3 и равно 1 с, что удовлетворяет
условию (16). Как показано в [8], при использовании широкополосных сигналов и
выполнении условия ![]() (где с - скорость света, l - поперечный размер
цели), отраженный от цели сигнал эквивалентен сигналу с постоянной амплитудой (нефлуктуирующий
сигнал). При этом для обнаружения цели с вероятностью 0,9 при уровне ложной
тревоги 10-4 требуемое значение отношения сигнал/шум на выходе
устройства обработки qвых2 должно быть не ниже 25.
(где с - скорость света, l - поперечный размер
цели), отраженный от цели сигнал эквивалентен сигналу с постоянной амплитудой (нефлуктуирующий
сигнал). При этом для обнаружения цели с вероятностью 0,9 при уровне ложной
тревоги 10-4 требуемое значение отношения сигнал/шум на выходе
устройства обработки qвых2 должно быть не ниже 25.
Подставляя в выражение (2.16) значения DfаТа, получим, что отношения сигнал/шум на входе ШРЛС qвх2 должно быть не ниже, чем 6,5×10-3 (-22 дБ), то есть в 153 раза меньше, чем уровень мощности шума (сигнала помехи). Из приведенного примера следует, что ШРЛС с СОС обеспечивает выделение полезного сигнала, уровень которого намного ниже уровня собственных шумов приемника или помехового сигнала на его входе.
Для сравнения отметим, что в ШРЛС с корреляционной обработкой сигнала, при том же значении произведения DfаТа минимальное значение qвх2 = 1,35×10-3 (-28 дБ).
В импульсных РЛС средняя мощность сигнала на входе тоже может быть ниже мощности помехового сигнала или шума приемника. Однако пиковое значение мощности полезного сигнала при этом должна быть больше мощности помехи, что с точки зрения скрытности работы РЛС крайне невыгодно.
Из изложенного следует, что для обработки широкополосных шумовых зондирующих сигналов в РЛС применимы как корреляционный, так и спектральный методы их обработки. Однако возможность практической реализации спектрального метода обработки в ШРЛС выгодно отличает его от корреляционного метода, требующего использования СВЧ линий задержки.
Существенными недостатками рассмотренной одноканальной ШРЛС с последовательной СОС являются энергетические потери и необходимость оптимизации уровня опорного сигнала.
2. Анализ методов формирования и обработки сигналов с большой базой.
Известно, что выбор методов формирования и обработки определяется типом выбранного зондирующего сигнала. Выбор типа сигнала производится исходя из заданных тактико-технических характеристик и условий работы РЛС. В табл.1 приводятся ожидаемые характеристики РЛС с различными видами зондирующих сигналов и дальностью действия.
Таблица 1. Ожидаемые характеристики РЛС
|
Характеристики |
РЛС БД |
РЛС МДД |
РЛС СДД |
||||
|
РЛС с ФКМ |
ШРЛС с посл. СОС |
ШРЛС с ГФ |
Имп. РЛС |
ШРЛС с ГФ |
Имп. РЛС |
ШРЛС с ГФ |
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Дальность разведки танка, км
|
3 |
10 |
16 |
20 |
|||
|
Длина волны, см |
3 |
2 |
0,8 |
||||
|
Полоса частот сигнала, МГц |
6 |
200 |
4 |
200 |
8 |
200 |
|
|
Коэффициент усиления антенны |
500 |
3000 |
30000 |
||||
|
Время накопления сигнала, мс |
0,34 |
1200 |
5 |
- |
5 |
- |
5 |
|
Время облучения цели за один цикл обзора, с |
1 |
1,4 |
0,3 |
- |
0,4 |
- |
0,5 |
|
Разрешающая способность по дальности, м |
50 |
1,5 |
1,5 |
30 |
1,5 |
10 |
1,5 |
|
Средняя мощность излучения, Вт |
0,06 |
0,3 |
0,015 |
0,6 |
0,12 |
15 |
1 |
|
Коэффициент подавления , дБ |
35 |
40 |
54 |
30 |
54 |
30 |
54 |
|
Спектральная плотность мощности зондирующего сигнала, Вт/Гц |
10-8
|
1,5 10-9 |
7 10-11 |
2 10-4 |
10-9 |
4 10-3 |
10-8 |
Примечание: РЛС БД – ближнего действия, МДД – малой дальности действия и СДД – средней дальности действия.
К числу наиболее важных факторов, определяющих выбор того или иного конкретного типа сигнала, относятся: дальность действия РЛС, диапазон доплеровских частот, уровень боковых лепестков, отношение сигнал/шум, наличие на входе приемника пассивных и активных помех.
Так специфика работы РЛС при разведке наземных целей заключается в том, что обнаружение целей практически всегда производится на фоне подстилающей поверхности и местных предметов. При этом, ввиду относительно малых размеров целей и значений их ЭПР, а также большого динамического диапазона уровня отражений от подстилающей поверхности, особые требования предъявляются к боковым лепесткам автокорреляционной функции зондирующего сигнала.
Известно, что формирование сложных сигналов с большой базой возможно на основе использования амплитудной, частотной или фазовой модуляции сигналов. С энергетической точки зрения амплитудная модуляция уступает фазовой и частотной и практически не используется в РЛС.
Применительно к фазовой и частотной модуляциям методы формирования и обработки можно разделить на два основных класса: активные и пассивные.
Активное формирование сигналов производится с помощью фазовой или частотной модуляции несущей. При этом реального растяжения сигнала во времени не происходит.
Пассивное формирование растянутого во времени кодированного сигнала осуществляется с помощью возбуждения некоторого устройства или схемы короткими импульсами.
При активной обработке реализуется корреляция между принятым сигналом и задержанными копиями передаваемого сигнала (корреляционная обработка). При пассивной обработке реализуется согласованная фильтрация, причем в качестве согласованного фильтра используется схема сжатия, сопряженная со схемой растяжения.
Известно, что с точки зрения возможности подавления пассивных помех и уровня боковых лепестков методы, основанные на фазовом кодировании, выгодно отличаются от методов с частотной модуляцией. Кроме того, возможность изменения ширины полосы, длительности импульсов и кодов ФКМ сигналов позволяет реализовать псевдошумовой зондирующий сигнал, что особенно важно для РЛС с повышенной скрытностью и помехоустойчивостью.
Сигналы с кодированием по фазе отличаются от ЧМ сигналов тем, что в них длинный импульс разбивается на некоторое число более коротких подимпульсов. Все подимпульсы имеют равную длительность; каждый подимпульс передается с определенным значением фазы в соответствии с фазовым кодом.
В настоящее время в РЛС для кодирования фазы зондирующего сигнала широко используются коды Баркера и последовательности максимальной длительности.
Коды Баркера являются оптимальными кодами. Их оптимальность заключается в том, что амплитуда пика автокорреляционной функции равна N, а значения боковых лепестков - 1, где N - число элементов или длина кода. Существенным недостатком, ограничивающим возможность их использования для кодирования сигналов в скрытных РЛС, является малая длина кода, так как до сих пор не найдено кодов Баркера длиной более 13 элементов.
Структура последовательностей максимальной длительности аналогична структуре случайных последовательностей и, следовательно, они обладают необходимыми автокорреляционными функциями. Для их формирования используют генераторы на регистрах сдвига с линейными обратными связями, которые являются простыми и удобными устройствами.
Длина максимальной последовательности равна N=2n-1, где n – число каскадов в генераторе. Общее число последовательностей максимальной длительности, которое можно сформировать генератором с n каскадами, равно
 ,
,
где рi - простые множители числа N.
Сдвиг значений по каскадам регистра осуществляется с темпом, определяемым тактовой частотой. При этом на выходе любого каскада образуется бинарная последовательность.
Примером реализации РЛС с таким зондирующим сигналом является, находящуюся в эксплуатации, отечественная РЛС разведки наземных движущихся целей СБР-3. В качестве исходной в этой РЛС используется последовательность максимальной длительности с числом элементов в коде N=1023.
Длительность элемента кода в данной РЛС равна 0,33 мкс (DR=50м), что соответствует ширине спектра сигнала порядка 6 МГЦ. Мощность зондирующего сигнала равна 60 мВт.
Указанные параметры сигнала и непрерывный режим его излучения не обеспечивают РЛС СБР-3 требуемой скрытности работы и помехоустойчивости. При этом дальность действия РЛС не может превышать 4...5 км. Указанные ограничения обусловлены в первую очередь невозможностью обеспечения требуемой развязки между ее приемным и передающим трактами при работе с одной антенной.
Таким образом, с учетом данных, приведенных выше можно сделать выводы:
1. В РЛС РНДЦ с повышенной помехозащищенностью могут использоваться как шумовые сигналы, создаваемые с помощью прямошумовых генераторов, так и ФКМ сигналы на основе использования последовательностей максимальной длительности. Выбор того или иного сигнала определяется возможностью их формирования и обработки цифровыми методами в требуемой полосе частот.
2. По информативности ШРЛС со спектральной обработкой сигналов не уступают ШРЛС с корреляционной обработкой сигнала, но отличаются простотой реализации.
3. Энергетический проигрыш ШРЛС со спектральной обработкой сигналов по сравнению с ШРЛС с корреляционной обработкой сигнала составляет: для одноканальной ШРЛС - 8,5…10 дБ; для двухканальной ШРЛС - 6 дБ; для рециркуляторной ШРЛС - 3…5 дБ.
3. Моделирование процесса обнаружения сигналов в шумовых РЛС
Моделирование процессов обнаружения отраженных сигналов в шумовых РЛС проводилось применительно к корреляционной и спектральной обработке сигналов.
Моделирование проводилось в среде математического редактора MathCAD.
При этом рассматривались следующие типы шумовых РЛС:
- ШРЛС с корреляционной обработкой сигналов;
- ШРЛС с синхронной спектральной обработкой суммарного и разностного сигналов;
- ШРЛС со спектральной обработкой суммарного (разностного) сигнала;
- ШРЛС при непрерывном и квазинепрерывном режимах излучения.
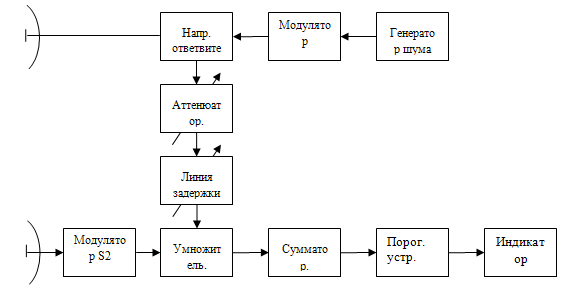
Упрощенные структурные схемы указанных РЛС приведены на рис. 2.
а) ШРЛС с корреляционной обработкой сигналов
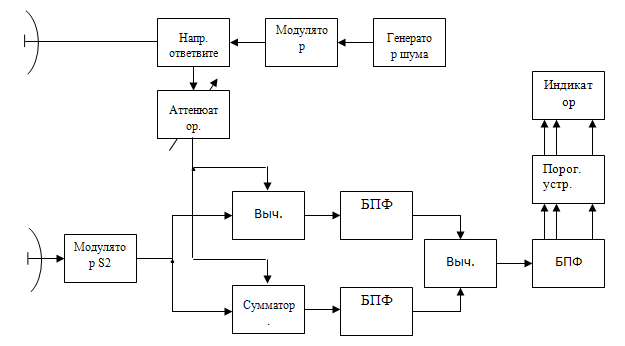
б) ШРЛС с синхронной обработкой спектров суммарного и разностного сигналов
в) ШРЛС со спектральной обработкой суммарного сигнала
Рис.2.
Упрощенные структурные схемы шумовых РЛС
Зондирующий сигнал формировался с помощью встроенных функций MathCAD whiten(N) и gaussn(N), которые генерировали выборку шумового сигнала с распределением амплитуды по равномерному («белый шум») и нормальному законам с нулевым средним и среднеквадратическим отклонением (stdev(x)), равным 1.
В модели была предусмотрена возможность реализации квазинепрерывного режима излучения зондирующего сигнала. Для этого непрерывный зондирующий сигнал модулировался по амплитуде по закону меандра.
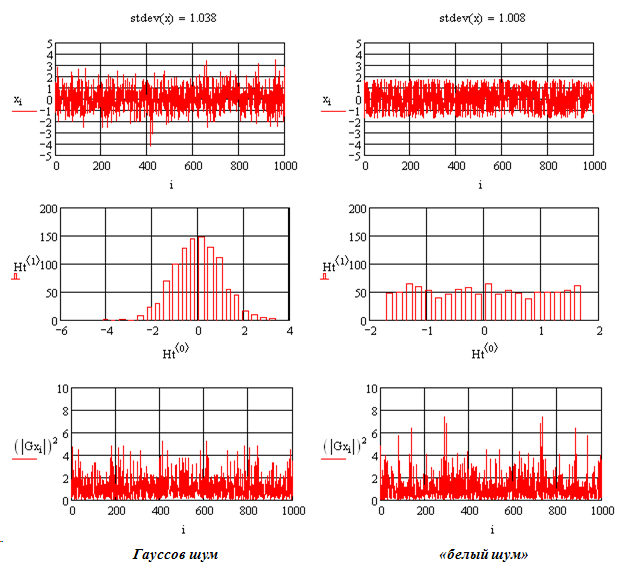
Рис. 3. Диаграммы исходного шумового сигнала, распределения его амплитуд и энергетический спектр
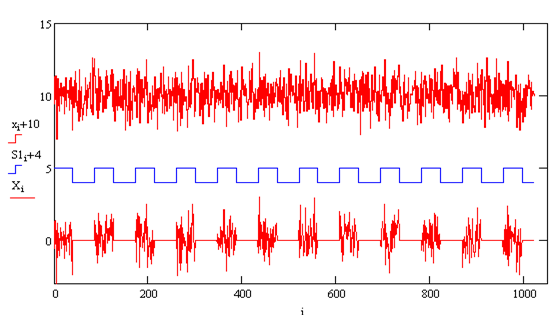
Рис. 4. Диаграммы исходного шумового сигнала, модулирующей функции и результирующего зондирующего сигнала при квазинепрервном излучении
Для примера на рис.3 показаны диаграммы одной из реализаций зондирующего сигнала, распределение его амплитуд и энергетические спектры при непрерывном режиме излучения.
На рис. 4 приведены диаграммы исходного сигнала, модулирующей функции и результирующего зондирующего сигнала при квазинепрерывном режиме излучения.
При реализации квазинепрерывного режима излучения формировались модулирующие функции как для зондирующего S1, так и для принимаемого S2 сигналов. Выражение для вычисления i-го значения модулирующей функции зондирующего сигнала имеет вид:
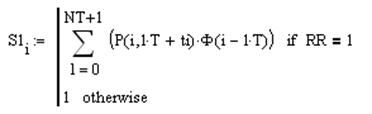 ,
,
где P(i,l∙T+ti)=Ф(i)-Ф[i-(l∙T+ti)]; T=2∙ti+tz – период излучения зондирующего сигнала; ti – длительность единичной посылки зондирующего сигнала; tz – время задержки начала приема отраженных сигналов относительно момента окончания излучения единичной посылки зондирующего сигнала; Ф(z) – функция единичного скачка, равная 0 при z меньше нуля и единице в остальных случаях; RR – параметр, задающий режим излучения: при RR=1 – квазинепрерывный режим, в остальных случаях – непрерывный.
Соответственно выражение для вычисления i-го значения модулирующей функции принимаемого сигнала записывается как:
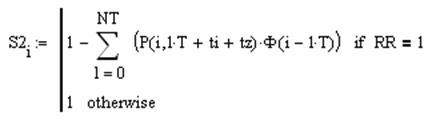 .
.
Диаграммы указанных модулирующих функций зондирующего и принимаемого сигналов приведены на рис. 5.
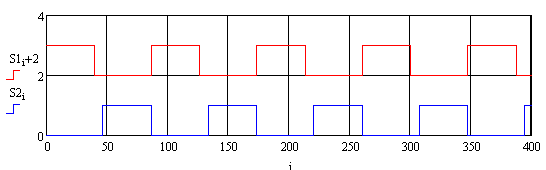
Рис.5. Модулирующие функции зондирующего и принимаемого сигналов.
Для формирования отраженных сигналов использовалась функция
 ,
,
где ko – коэффициент, учитывающий уровень сигнала, относительно уровня собственного шума приемника РЛС; f – выборка сигнала; bo – параметр, учитывающий задержку опорного сигнала относительно нулевого индекса (времени); mo – текущий индекс принимаемого сигнала; tzo – задержка (по индексу или времени) принимаемого сигнала относительно зондирующего сигнала.
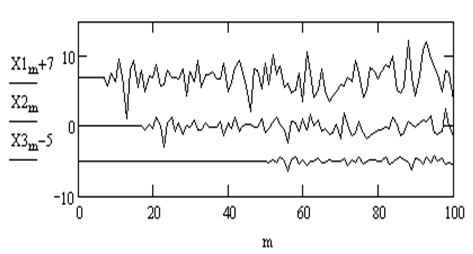
Рис.6. Диаграммы сигналов на входе приемника при работе в непрерывном режиме.
На рис.6 для примера приведены диаграммы трех отраженных сигналов с задержкой, равной 7, 17 и 50 индексам, и амплитудой, соответствующей 3, 1 и 0,5 при непрерывном режиме излучения.
На рис. 7. приведены диаграммы тех же сигналов, но при работе в квазинепрерывном режиме.
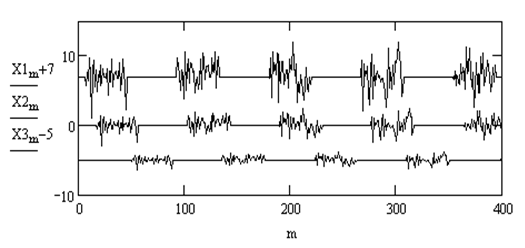
Рис. 7. Диаграммы сигналов на входе приемника при квазинепрерывном режиме работы.
Приведенные на рис. 6 и 7 сигналы суммировались с сигналами помехи и внутренними шумами приемника. При этом полученный результирующий сигнал определялся в соответствии с выражением
![]() ,
,
где Ks – вспомогательный множитель для обнуления полезных сигналов; pp и pv – шумовые сигналы, соответствующие внешней активной помехе и внутренним шумам приемника; kp, kv – коэффициенты, учитывающие уровни помеховых сигналов.
Для внутренних шумов kv всегда равен 1.
Результирующий сигнал Xvx на выходе модулятора S2 приведен на рис. 8, где для наглядности одновременно показаны сигналы X1, X2, X3 и функция S2.
Сигнал Xvx и в соответствии со схемами на рис. 8, являлся одним из входных сигналов сумматора и вычитателя в ШРЛС со спектральной обработкой и сомножителем на входе умножителя в РЛС с корреляционной обработкой сигналов. Вторым сигналом указанных устройств являлся опорный сигнал, каждое значение которого рассчитывалось в соответствии с выражением
 ,
,
где
![]() - коэффициент
пропорциональности; X – исходный шумовой сигнал; m– текущий индекс; b и j –
параметры, задающие задержку опорного сигнала относительно нулевого индекса
(времени).
- коэффициент
пропорциональности; X – исходный шумовой сигнал; m– текущий индекс; b и j –
параметры, задающие задержку опорного сигнала относительно нулевого индекса
(времени).
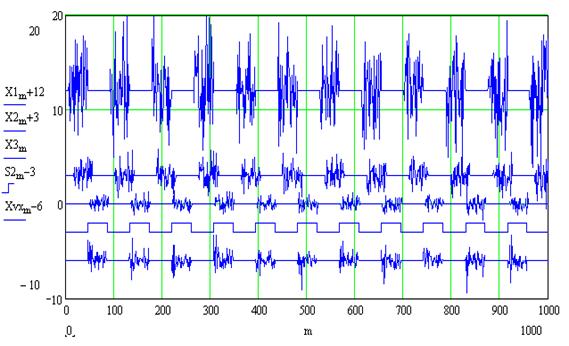
Рис. 8. Диаграммы входных сигналов и модулирующей функции S2.
Сигналы, соответствующие выходным сигналам сумматора и вычитателя, рассчитывались по формулам:
![]() и
и ![]() .
.
Их энергетические спектры для непрерывного и квазинепрерывного режимов работы, полученные путем дискретного преобразования Фурье, приведены на рис. 9.
Там же приведены реализации разности энергетических спектров суммарного и разностного сигналов:
 и
и ![]() .
.
Из рис. 9 видно, что огибающие энергетических спектров суммарного и разностного сигналов промодулированы по закону косинуса. Фазы указанной модуляции отличаются на 180о. При этом видно, что амплитуда флюктуационных составляющих в разности спектров суммарного и разностного сигналов меньше, чем в каждом из спектров.
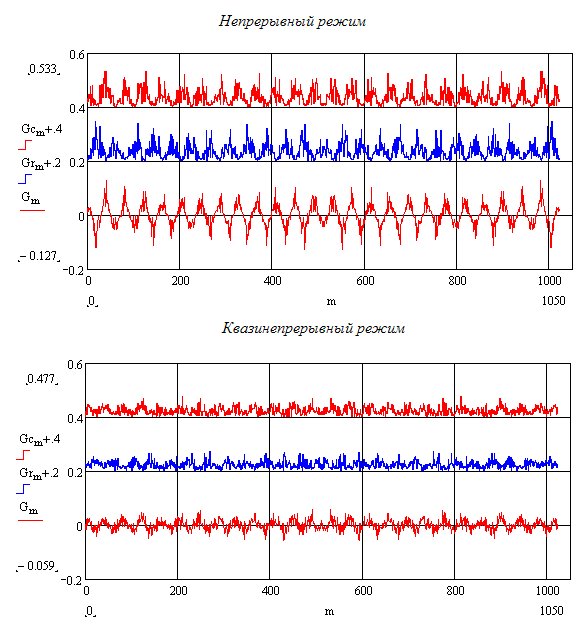
Рис. 9. Энергетические спектры суммарного, разностного сигналов, а также их разность.
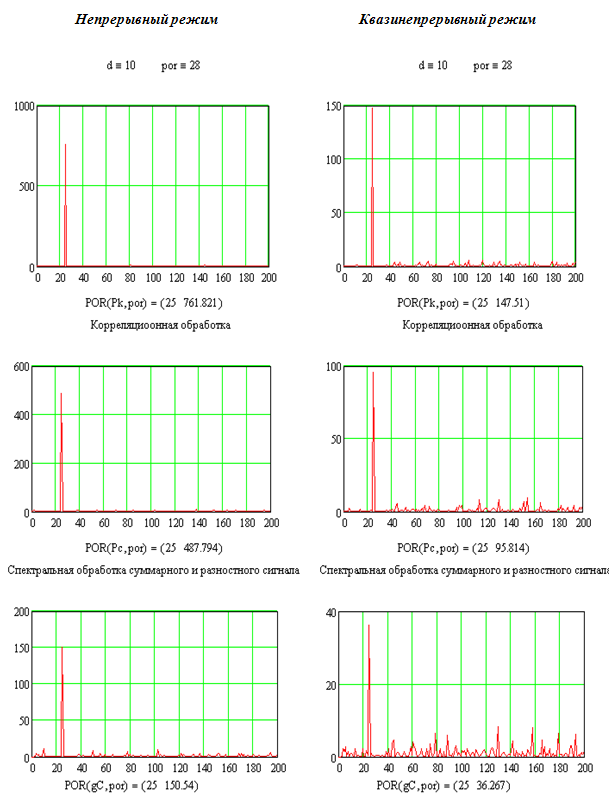
Рис. 10. Отклики сигналов на выходе устройств обработки шумовых РЛС
На рис. 10 приведены отклики на выходе устройств обработки рассматриваемых РЛС для двух режимов работы. При этом выходной сигнал в корреляционной РЛС рассчитывался по формуле:
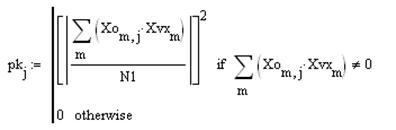 ,
,
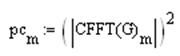
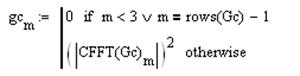
а в РЛС со спектральной обработкой как:
 - с синхронной обработкой
суммарного и разностного сигналов;
- с синхронной обработкой
суммарного и разностного сигналов;
 - с обработкой
суммарного сигнала.
- с обработкой
суммарного сигнала.
Отклик на выходе устройства обработки соответствовал выходному отношению сигнал/шум и определялся согласно выражению:
 ,
,
где: f - выборка выходных сигналов на всех каналах дальности; 2n - число элементов, по которым осуществляется усреднение при оценке отношения сигнал/шум.
Приведенные на рис. 10 значения POR(f, por) соответствуют: в первом столбце - индекс элемента, который превысил пороговое значение por, во втором столбце – само значение отношения сигнал/шум.
Функция для определения указанных параметров имеет вид:
 .
.
Из рис. 10 видно, что при входном отношении, равном 1, выходное отношение сигнал/шум превышает заданный порог во всех рассматриваемых РЛС.
Для оценки вероятности обнаружения сигнала при различных входных отношениях сигнал/шум была разработана специальная программа, приведенная на рис. 11.
В данной программе формировались зондирующий и отраженный сигналы, а также осуществлялась имитация внутренних шумов приемника. Обработка полученных сигналов производилась в соответствии со схемами РЛС, приведенными на рис. 2.
Для оценки вероятности обнаружения задавались уровень сигнала относительно уровня внутренних шумов, пороговый уровень и количество реализаций. Вероятность обнаружения для каждой РЛС определялась как отношение числа обнаружений к общему количеству реализаций.
Характеристики обнаружения рассматриваемых шумовых РЛС при заданных пороговых отношениях по мощности, равных 25 и 50, приведены на рис. 12.
Рис. 11. Подпрограмма для расчета выходного отношения сигнал/шум.
Рис. 12. Характеристики обнаружения шумовых РЛС
Из рис. 12 видно, что все шумовые РЛС обеспечивают возможность обнаружения отраженных сигналов на фоне помеховых шумов при входных отношениях сигнал/шум меньше 1. Корреляционный метод обработки при прочих равных условиях обеспечивает наибольшее выходное отношение сигнал/шум. При этом энергетический выигрыш корреляционного метода по результатам моделирования составил:
- по отношению к ШРЛС с синхронной спектральной обработкой суммарного и разностного сигналов при Ро=0,8 - ~4…5 дБ;
- по отношению к ШРЛС со спектральной обработкой суммарного сигнала при тех же значениях вероятности обнаружения и порогового отношения сигнал/шум - ~ 7…9 дБ.
Полученные результаты достаточно близко соотносятся с теоретическими выводами, согласно которых потенциальный энергетический выигрыш корреляционной обработки по отношению к спектральной соответственно равен 6 и 10 дБ.
В приведенном случае представлены результаты для случая непрерывного режима работы РЛС. Программа позволяет проводить оценку характеристик обнаружения и для квазинепрерывного режима.
Как показывают исследования, достоинством квазинепрерывного режима работы ШРЛС является возможность обеспечения мертвой зоны. Что обеспечивает подавление мешающих отражений от близко расположенных перед РЛС подстилающей поверхности и местных предметов.
Для примера на рис. 13 приведены диаграммы откликов выходных сигналов при непрерывном и квазинепрерывном режимах работы ШРЛС и наличии трех целей, одна из которых находится существенно ближе к РЛС по сравнению с другими.
При проведении расчетов принимались следующие значения параметров:
- время задержки отраженных сигналов t1=5, t2=12 и t3=28 индексов;
- время задержки начала приема сигналов относительно момента окончания излучения tz=5;
- коэффициенты пропорциональности уровней сигналов: k1=27, k2=3, k3=1, kv=1;
- количество реализаций NA=100;
- пороговое значение выходного сигнала por =25.
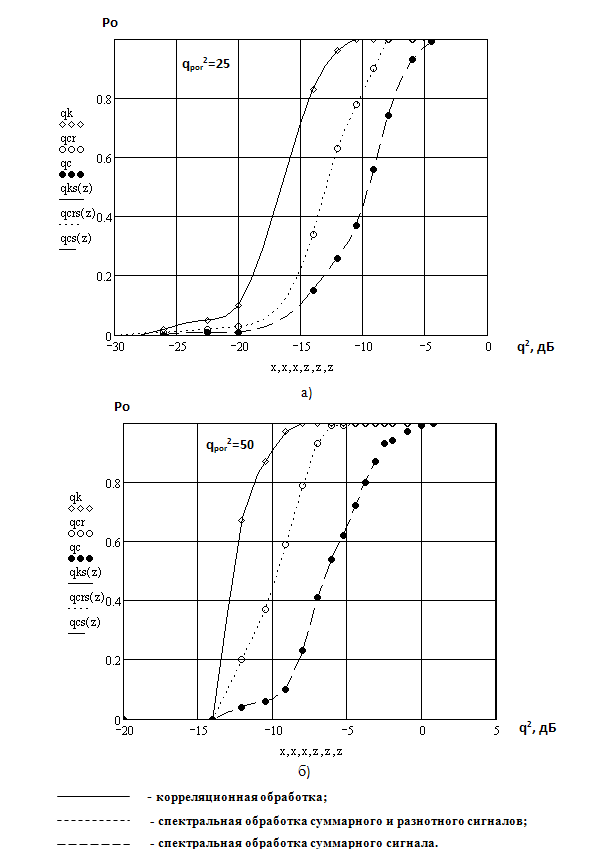
Рис. 13. Отклики сигналов на выходе устройств обработки и вероятности обнаружения отраженных сигналов РО3: (а) при непрерывном и (б) квазинепрерывном режимах работы РЛС.
Полученные результаты подтверждают целесообразность использования квазинепрерывного режима работы в шумовых РЛС. Так из рис.14. видно, что при указанных параметрах сигналов при работе в непрерывном режиме вероятность обнаружения дальних целей практически равно 0. При включении квазинепрерывного режима происходит подавление сигнала, отраженного от ближней цели и более удаленные цели обнаруживаются с требуемой вероятностью. Исключение в рассмотренном случае составила ШРЛС со спектральной обработкой сигнала, что обусловлено более худшими ее характеристиками обнаружения.
И в качестве примера, как итогового результата, на рис. 14 приведены характеристики откликов сигналов на выходе устройств обработки при наличии двух близко расположенных друг к другу целей. Из рисунка видно, что при одинаковых уровнях входных сигналов две цели, находящиеся в соседних элементах разрешения обнаруживаются. При этом в ШРЛС со спектральной обработкой суммарного сигнала одна цель не обнаруживается, но появляются отметки ложной цели, находящейся в элементе разрешения, соответствующем разности задержек двух истинных сигналов.
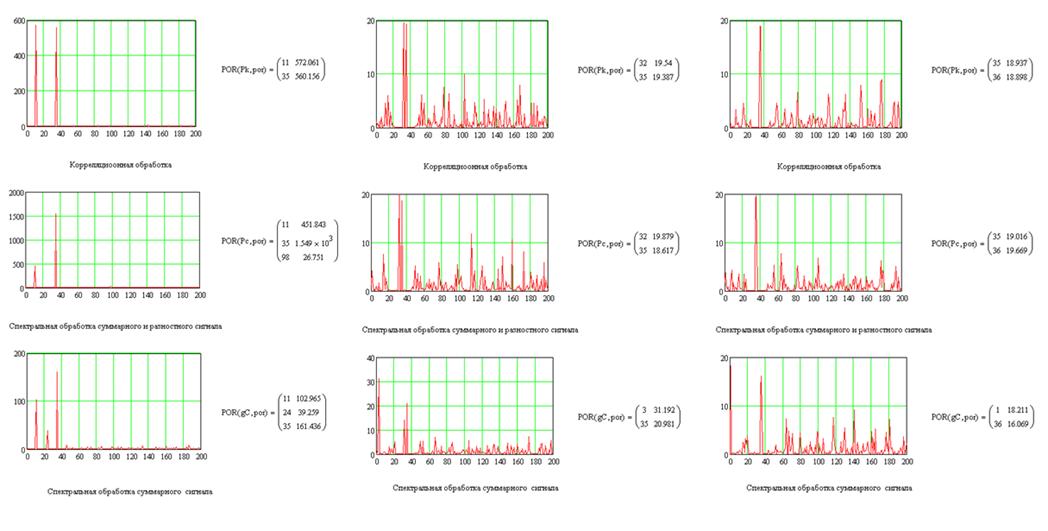
Рис. 14. Отклики сигналов при обнаружении двух целей
В итоге рассмотренных вопросов по данному подразделу можно сделать следующие заключения.
Проведенное моделирование процессов обнаружения и селекции целей в шумовых РЛС показало:
1. Все рассмотренные шумовые РЛС обеспечивают возможность обнаружения отраженных сигналов на фоне помеховых шумов при входных отношениях сигнал/шум меньше 1.
Корреляционный метод обработки при прочих равных условиях обеспечивает наибольшее выходное отношение сигнал/шум. При этом энергетический выигрыш корреляционного метода по результатам моделирования составил:
- по отношению к ШРЛС с синхронной спектральной обработкой суммарного и разностного сигналов при Ро=0,8 - ~4…5 дБ;
- по отношению к ШРЛС со спектральной обработкой суммарного сигнала при тех же значениях вероятности обнаружения и порогового отношения сигнал/шум - ~ 7…9 дБ.
2. Полученные результаты моделирования подтверждают целесообразность использования квазинепрерывного режима работы в шумовых РЛС. При этом обеспечивается подавление сигналов, отраженных от ближних целей и более удаленные цели обнаруживаются с требуемой вероятностью.
3. Результаты моделирования подтвердили возможность высокого разрешения в шумовых РЛС. При одинаковых уровнях входных сигналов две цели, находящиеся в соседних элементах разрешения обнаруживались как раздельные цели.
4. Экспериментальные исследования макета шумовой РЛС
Экспериментальные исследования проводились как в лабораторных, так и натурных условиях. Целью экспериментальных исследований являлось подтверждение правильности теоретических выводов о преимуществах использования широкополосных шумовых зондирующих сигналов в РЛС РНДЦ.
Для проведения испытаний были изготовлены низкочастотный (fo=1,6 Гц, Df=3 МГц) и высокочастотный (fo=10 Гц, Df=150 МГц) макеты ШРЛС.
В процессе проведения испытаний была проведена оценка:
- помехоустойчивости макетов одноканальной, двухканальной и рециркуляторной ШРЛС;
- дальность действия ШРЛС с непрерывным и квазинепрерывным режимами излучения;
- возможности использования гребенчатых фильтров в устройстве обработки сигналов ШРЛС.
4.1. Лабораторные испытания одноканальной и рециркуляторной шумовых РЛС с последовательным спектральным анализом
Экспериментальная оценка помехоустойчивости одноканальной и рециркуляторной ШРЛС в лабораторных условиях проводилась с использованием макета дециметрового диапазона радиоволн (fo=1,6 ГГц, Df=3 МГц), структурная схема которого приведена на рис. 15.
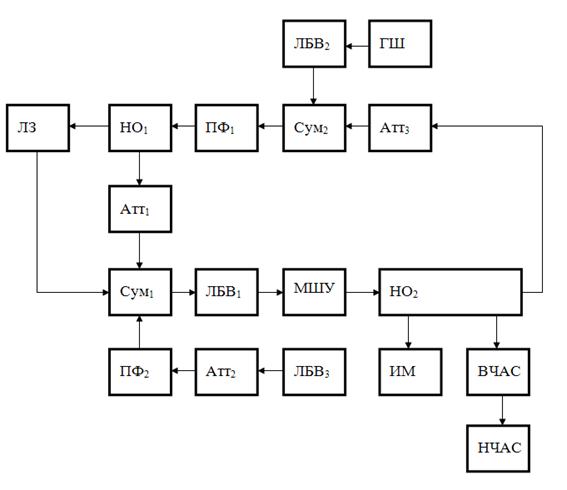
Рис.15. Блок-схема макета рециркуляторной ШРЛС
Линия задержки (ЛЗ) была введена в контур макета ШРЛС для имитации времени задержки сигнала (Тз=2,82 мкс) и его затухания при распространении от РЛС до цели и обратно (aзат= - 63 дБ).
Уровень помех сигнала на входе ШРЛС (Сум1) регулировался с помощью откалиброванных аттенюаторов Атт1,2. При этом в качестве помехового сигнала использовались внутренние шумы ЛБВ3.
Для исключения ошибок измерения в макет были введены полосовые фильтры ПФ1 и ПФ2 с одинаковой полосою пропускания (Df=30 МГц), которые были настроены на частоту fo=1,6 ГГц.
Наличие модуляции в энергетическом спектре суммарного сигнала контролировалось с помощью высокочастотного (ВЧАС) СК4-60 (ВЧАС) и низкочастотного СК4-56 (НЧАС) анализаторов спектра, а уровень мощности выходного сигнала измерялся с помощью измерителя мощности (ИМ) М3-51.
При работе в одноканальном режиме аттенюатор Атт3 устанавливался в положение aзат.max= - 40 дБ. Уровень опорного сигнала регулировался с помощью аттенюатора Атт1.
Для перехода от одноканального к рециркуляторному режиму работы ШРЛС аттенюатор Атт1 устанавливался в положение aзатАтт4=max, а аттенюатор АТТ3 – в положение aзатАтт3=min.
Предварительно, перед началом исследований, снималась амплитудная характеристика приемо-передающего тракта (ППТ) макета ШРЛС и вычислялся его коэффициент передачи КППТ при различных уровнях входного сигнала.
Вид амплитудной характеристики ППТ макета ШРЛС и численные значения коэффициента КППТ приведены на рис. 16.
Отношение сигнал/помеха на входе ШРЛС (qвх2) при замкнутом контуре вычислялось по формуле
qвх2 = m2 = КППТ +aзатЛЗ .
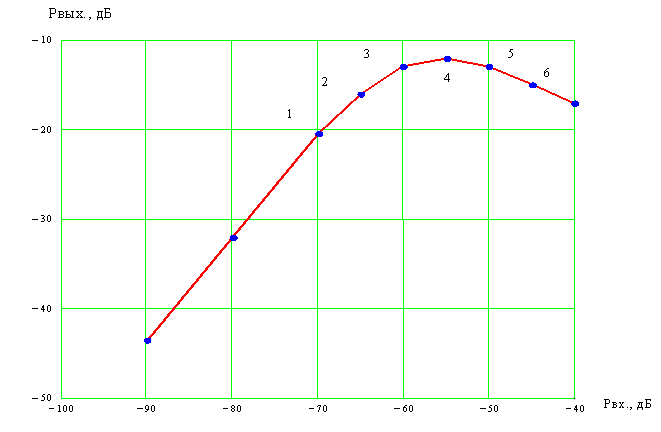
Рис. 16. Амплитудная характеристика приемопередающего тракта макета ШРЛС.
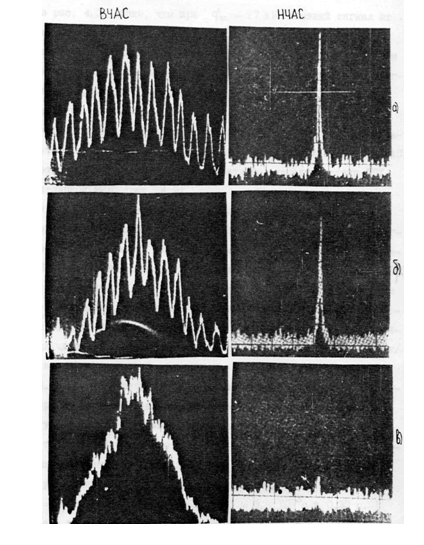
Рис. 17. Полезный сигнал от цели при qвх2=-17 дБ.
На рис. 17 приведены спектрограммы сигналов на выходах ВЧАС и НЧАС в одноканальной ШРЛС при различных значениях мощности помехового сигнала и оптимальных значениях отношения амплитуд опорного и отраженного (помехового) сигналов.
Представленные материалы соответствуют следующим условиям:
рис.17 а – помеха отсутствует (а2=1);
рис.17 б – уровень помехи равен уровню отраженного сигнала (qвх2=1);
рис.17 в – уровень помехи превышает уровень полезного сигнала (qвх2=-17 дБ).
Из рис. 17 в видно, что при qвх2=-17 дБ полезный сигнал от цели еще может быть обнаружен.
Результаты исследований работы макета ШРЛС в рециркуляторном режиме при различных уровнях помехового сигнала и временах интегрирования Ти=3,3 10-3 с (рис.17 б) и Ти=0,33 с (рис.17.10 в) приведены на рис.3.
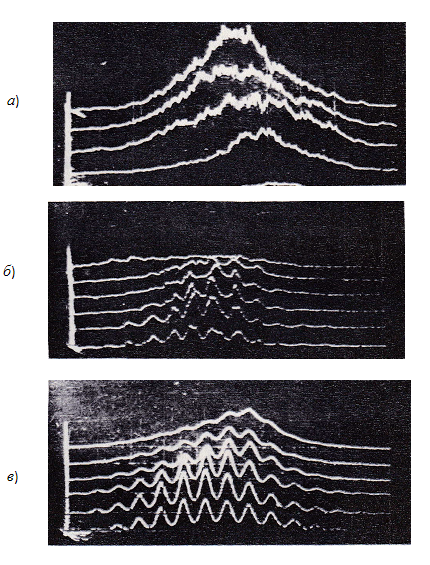
Рис. 18. Спектрограммы сигналов в одноканальной и рециркуляторной ШРЛС при различном уровне сигнала помехи
На рис.18 а представлены спектрограммы сигнала на выходе разомкнутого контура, а на рис.18 б и 18 в - замкнутого контура (ВЧАС), соответствующие точкам 1…6 на амплитудной характеристике ППТ рециркуляторной ШРЛС.
Из рис. 18 б и 18 в видно, что полезная модуляция в огибающей энергетического спектра циркулирующего по замкнутому контуру сигнала сохраняется вплоть до уровня помехи, соответствующего насыщению ППТ ШРЛС (точка 6 при Ти=0,33 с и точка 5 - при Ти=3,3 10-3 с).
Область насыщения, в которой рециркуляторная ШРЛС сохраняла свою работоспособность, при времени интегрирования, равном Ти=3,3 mс, составило приблизительно 15 дб. С увеличением времени интегрирования соответственно увеличивалось значение минимального входного отношения сигнал/шум и величина указанной области, что наглядно иллюстрируется рис. 18 б и 18 в.
Подавление одноканальной ШРЛС, в отличие от рециркуляторной ШРЛС, наблюдалось при ее работе на линейном участке амплитудной характеристики ее приемного тракта.
В табл. 2 приведены расчетные и экспериментально полученные значения отношения сигнал/шум (qвхmin2) на входе одноканальной и рециркуляторной ШРЛС при следующих исходных данных:
qвых2=1; DFа= 100 кГц; R2(tc)=0,652; Ти=3,3 mс и Ти=0,33 с.
В числителе приведены расчетные значения qвхmin2 , а в знаменателе – экспериментальные.
Из приведенных на рис. 17 и 18 и в табл. 2 данных видно, что рециркуляторная ШРЛС, даже без учета величины линейного участка ее ППТ, превосходит по помехоустойчивости одноканальную ШРЛС на 6 дБ.
Таблица 2 . Расчетные и экспериментально полученные значения отношения сигнал/шум (qвхmin2) на входе одноканальной и рециркуляторной ШРЛС
|
Вариант ШРЛС |
Формула расчета qвхmin2 |
Ти=3,3∙10-3 с |
Ти=0,33 с |
|
qвхmin2, дБ |
qвхmin2, дБ |
||
|
Одноканальная |
3 qвыхmin2 DfaТиR2(tc) |
-18,6/ -17 |
-38,4/-37 |
|
Рециркуляторная |
qвыхmin2 DfaТиR2(tc) |
-23,4/-23 |
-43,3/-43 |
Таким образом, экспериментальные данные подтверждают теоретические выводы о более высокой помехоустойчивости рециркуляторной ШРЛС.
4.2. Натурные испытания одноканальной и двухканальной ШРЛС
Экспериментальные исследования помехоустойчивости одноканальной и двухканальной ШРЛС проводились с помощью макета 3 см диапазона радиоволн. Структурная схема макета приведена на рис. 19.
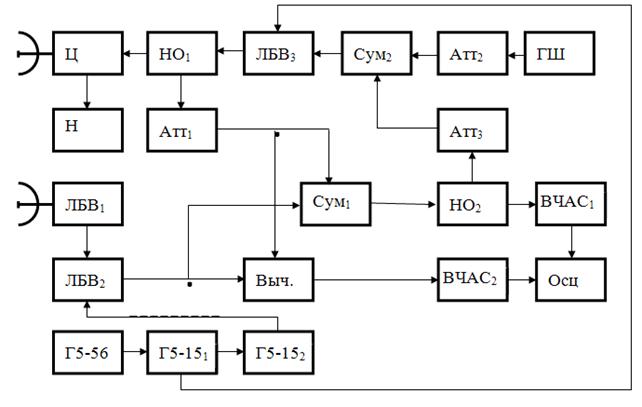
Рис.19. Блок-схема высокочастотного макета ШРЛС
В качестве источника задающего шумового сигнала использовался твердотельный прямошумовой генератор (ГШ) на лавино-пролетном диоде с интегральной мощностью 15 мВт и полосой частот – 150 МГц. Выходной сигнал ГШ через аттенюатор Атт2 поступал на вход усилителя мощности ЛБВ3 (УВ-45) и далее через направленный ответвитель НО1 и циркулятор Ц к передающей антенне (Ризлср=15 мВт). Часть излучаемого сигнала (опорный сигнал) со второго выхода НО1 через Атт1 подавалась на один из входов двойного волноводного ЕН тройника, на второй вход которого поступал усиленный в ЛБВ1 (УВ-103) и ЛБВ2 (УВ-12) отраженный от цели сигнал. В результате на выходах тройника формировались сигналы, соответствующие сумме и разности опорного и отраженного от цели сигналов. Синхронный спектральный анализ суммарного и разностного сигналов осуществлялся двумя высокочастотными анализаторами спектра ВЧАС1 и ВЧАС2 (С4-27). Синхронный режим работы ВЧАС1 и ВЧАС2 достигался за счет использования общего для них перестраиваемого гетеродина ВЧАС1. В качестве вычитающего устройства использовался осциллограф (Осц) С1-18, на дифференциальные входы которого подавались сигналы с выходов квадратичных детекторов ВЧАС1 и ВЧАС2.
В макете была предусмотрена возможность работы в рециркуляторном режиме. Для этого аттенюатор Атт1 устанавливался в положение aзатАтт1=mах, а Атт3 – в положение aзатАтт3=min. Требуемое значение коэффициента передачи ППТ устанавливалось путем изменения коэффициента усиления ЛБВ3.
При оценке помехоустойчивости ШРЛС регистрация отраженного от цели сигнала производилась визуально по наличию модуляции в огибающей энергетического спектра анализируемого сигнал на экране ВЧАС1,2 или осциллографа С1-18.
В качестве цели использовался уголковый отражатель с эффективной поверхностью рассеяния 0,1 м2, удаленный на расстояние 40 м от ШРЛС. Источником помех служил второй твердотельный генератор шума на ЛПД, полоса часто которого совпадала с полосой пропускания приемника ШРЛС, а выходная мощность была равна примерно 30 мВТ. Помеха воздействовала по боковым лепесткам приемной антенны макета ШРЛС. Измерение мощности помехового, опорного и отраженного от цели сигналов производилась на выходе двойного ЕН тройника с помощью термисторного моста ЯЧМ-20.
Методика определения коэффициента подавления ШРЛС заключалась в следующем:
- измерялась мощность зондирующего сигнала Ризл.1;
- измерялась мощность сигнала на выходе тройника при наличии (Ротр.1) и отсутствии (Ротр.2) цели;
- по формуле Ротр.УГ1= Ротр.1- Ротр.2 вычислялась мощность отраженного от цели сигнала;
- измерялась мощность помехового сигнала на выходе сумматора Рп при выключенном передатчике ШРЛС;
- уменьшалась мощность зондирующего сигнала Ризл.1 до уровня Ротр.2, при котором определение наличия модуляции в ЭССС на экране ВЧАС1,2 или Осц было невозможно, выключался источник помех и измерялось значение Ризл.2;
- определялась мощность отраженного от цели сигнала Ротр.УГ1 при мощности зондирующего сигнал, равной Ризл.2
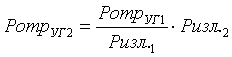 ;
;
- вычислялось минимальное значение отношения сигнал/шум на входе ШРЛС по формуле
![]() .
.
Результаты измерений, проведенных в соответствии с приведенной методикой, для одноканальной и двухканальной ШРЛС представлены в табл. 3.
Таблица 3. Результаты измерений
|
Параметры |
Одноканальная ШРЛС |
Двухканальная ШРЛС |
|
Ризл.1 |
50 мВт |
50 мВт |
|
Ротр.1 |
205 мкВт |
205 мкВт |
|
Ротр.2 |
160 мкВт |
160 мкВт |
|
Ротр.УГ1 |
45 мкВт |
45 мкВт |
|
Рп |
175 мкВт |
175 мкВт |
|
Ризл.2 |
1,42 мВт |
0,6 мВт |
|
Ротр.УГ2 |
1,28 мкВт |
0,54 мкВт |
|
qвхmin2 |
7,3 10-3(-21,4 дБ) |
3,1 10-3(-25,1 дБ) |
Расчетные значения qвхmin2 при qвыхmin2=1, DFа=300 кГц, Ти=3,3 10-3 с и R2(tc) = 0,652 соответственно были равны:
для одноканальной ШРЛС - -23 дБ;
для двухканальной ШРЛС - -28 дБ.
Для иллюстрации на рис. 20 приведены спектрограммы сигналов на выходе одноканальной и двухканальной ШРЛС.
Из рис.20 а видно, что при отсутствии опоры и наличии двух целей в диаграмме направленности антенны ШРЛС спектры суммарного и разностного сигналов промодулированы. Модуляционные составляющие обусловлены пространственным сложением части зондирующего сигнала, просачивающегося из передающей антенны в приемную, и отраженных от первой и второй целей сигналов. В вычитающем устройстве двухканальной ШРЛС указанные составляющие взаимно компенсируются (рис.20 в).
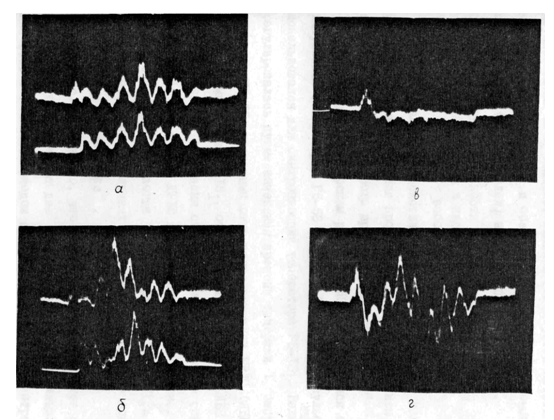
Рис. 20. Спектрограммы сигналов, полученные на экране осциллографа: а, б – на выходе суммарного и разностного каналов при отсутствии (а) и наличии (б) опорного сигнала; в, г – сигналы на выходе вычитающего устройства при отсутствии (в) и наличии (г) опорного сигнала
При наличии опорного сигнала в энергетических спектрах суммарного и разностного сигналов присутствуют модуляционные составляющие указанные выше, а также составляющие, обусловленные сложением опорного сигнала с просачивающимся и отраженными от первой и второй целей сигналами (рис.20 б). Т.е. в энергетических спектрах суммарного и разностного сигналов присутствуют модуляционные составляющие, соответствующие 5-ти целям. В результате в результирующем сигнале на выходе вычитающего устройства, как это видно из рис.6 г, модуляционные составляющие, соответствующие ложным целям отсутствуют.
Таким образом, экспериментальные исследования подтвердили теоретические выводы и показали, что двухканальная ШРЛС обладает большей помехоустойчивостью (на 5 дБ), чем одноканальная ШРЛС, и обеспечивает подавление комбинационных составляющих (ложных целей) на входе приемника ШРЛС.
4.3. Оценка дальности действия шумовых РЛС с непрерывным и квазинепрерывным режимами излучения
Оценка дальности действия ШРЛС с непрерывным и квазинепрерывным режимами излучения проводилась с использованием макета, структурная схема которого приведена на рис.21.
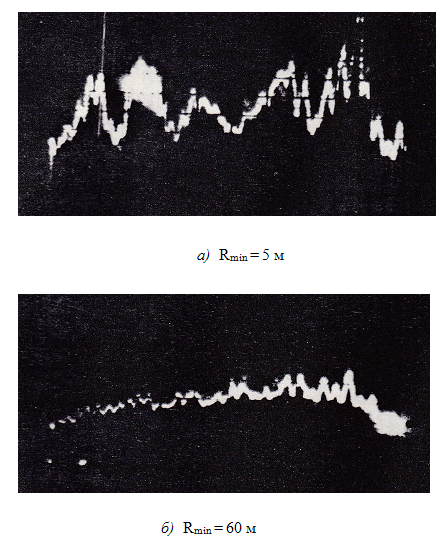
Рис. 21. Спектры сигналов при наличии двух объектов при разных значениях мертвой зоны в ШРЛС Rmin
Квазинепрерывный режим работы ШРЛС обеспечивался с помощью импульсного генератора Г5-56 и Г5-15. Генератор Г5-56 использовался для синхронизации генератора Г5-151. Величина мертвой зоны ШРЛС регулировалась путем изменения времени задержки Тз импульсов генератора Г5-152, которыми открывался приемник ШРЛС (ЛБВ2) относительно импульсов Г5-151 , открывающих передатчик (ЛБВ3).
На рис. 21 приведены спектрограммы суммарного сигнала на экране ВЧАС при работе ШРЛС в квазинепрерывном режиме. Рис.21 а соответствует случаю, когда Тз=0, а рис.21 б – Тз=2,4 мкс (R»60 м).
В обоих случаях длительность импульсов зондирующих сигналов была равна 2 мкс.
Из рис. 21 а видно, что в энергетическом спектре суммарного сигнала присутствуют две частоты модуляции. Модуляция ЭССС с большим периодом соответствует сигналу, отраженному от ближней цели (R1=40 м), а с меньшим периодом – от дальней цели (R2=20 м). По мере увеличения Тз глубина модуляции от ближней цели уменьшалась и при Тз=2,4 мкс практически становилась равной нулю, что указывает на наличие "мертвой" зоны ШРЛС, что хорошо видно из рис. 21 б.
При оценке дальности действия ШРЛС в качестве цели использовалась автомашина Зил-131 с открытым кузовом. За максимальную дальность действия ШРЛС принималась дальность, при которой еще достаточно уверенно наблюдалась модуляция огибающей энергетического спектра анализируемого сигнала на экране ВЧАС.
Мощность зондирующего сигнала при работе ШРЛС в непрерывном режиме составляла 50 мВт, а чувствительность приемника, при входной полосе приемника Df=150 Мгц, – 8 10-11 Вт.
Ожидаемое значение максимальной дальности действия макета одноканальной ШРЛС при работе в непрерывном режиме (без учета влияния просачивающегося в приемный канал зондирующего сигнала и мешающих отражений от земли и местных предметов) можно определить по формуле
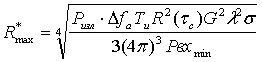 ,
,
где Ризл=50мВт - мощность зондирующего сигнала; Dfa=300кГц -полоса пропускания перестраиваемого фильтра ВЧАС; Ти=3мс - время интегрирования сигнала ВЧАС; R2(tc)=0,65 - квадрат коэффициента корреляции между опорным и отраженным от цели сигналами; G=500 - коэффициент усиления антенны; l=3см - рабочая длина волны; s=18м2- среднее значение эффективной поверхности рассеяния цели; Рвхmin=8·10-11Вт - чувствительность приемника макета ШРЛС.
Подставляя указанные значения в формулу, получим, что R*max равняется 725м. При развязке между приемником и передатчиком, равной 10-8, дальность действия ШРЛС будет равна 465м. Экспериментально полученные значения Rmax для одноканальной и рециркуляторной ШРЛС с непрерывным режимом излучения и последовательной СОС составили 500м.
При работе в квазинепрерывном режиме мощность зондирующего сигнала была равна 5 мВт, длительность зондирующего импульса – 2 мкс, а период повторения – 20 мкс. С учётом того, что при коммутации приемника ШРЛС средняя мощность его шумов уменьшается в Q раз (Q- скважность импульсов коммутации) можно, воспользовавшись выражением (1), можно показать, что при работе в квазинепрерывном режиме R*max будет равна 725м. Экспериментально измеренное значение R*max в этом случае составило 750м.
Сравнивая отношения экспериментально полученных и расчетных значений R*max получим
![]() и
и
![]() ,
,
что говорит о хорошем совпадении теоретических и экспериментальных результатов.
Таким образом, проведенные экспериментальные исследования показали, что применение квазинепрерывного режима позволяет:
- осуществить развязку приемного и передающего каналов ШРЛС и обеспечить возможность для работы с одной антенной;
- создать "мертвую" зону ШРЛС и исключить влияние отражений от земли и местных предметов, расположенных вблизи антенны;
- исключить принципиальные ограничения по дальности действия ШРЛС.
4.4 Экспериментальные исследования шумовых РЛС с гребенчатыми фильтрами в устройстве обработки сигналов
С целью исследования возможности использования гребенчатых фильтров для обработки сигналов в ШРЛС был разработан и собран блок акустооптической обработки сигналов (БАООС) и проведены полигонные испытания макета ШРЛС, структурная схема которого приведена на рис. 22.
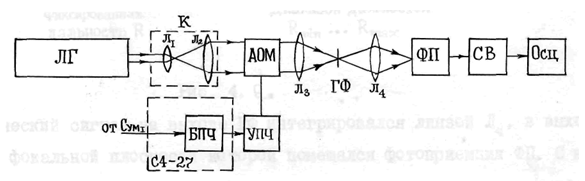
Рис. 22. Структурная схема полигонного макета испытания ШРЛС
Для выделения полезной информации о цели сигнал с выхода Сум1 подавался на вход блока преобразования частоты (БПЧ) анализатора спектра С4-27.
Частота сигнала на выходе БПЧ была равна 160 МГц, а его полоса – 100 МГц. Далее сигнал подавался на вход специально изготовленного блока акустооптической обработки сигналов, структурная схема которая включала в себя: лазер ЛГ-56 (ЛГ), коллиматор (К), специальную линзу, – акустооптический модулятор (АОМ), фотоприемник ФЭУ-51 (ФП), селективный вольтметр В6-9 (СВ), осциллограф С8-13 (ОСЦ) и усилитель промежуточной частоты (УПЧ).
Работа БАООС сводилась к следующему.
С выхода БПЧ сигнал поступал на вход УПЧ, амплитудно-частотная характеристика которого (АЧХ) была согласована с АЧХ БПЧ, и далее на пъезопреобразователь АОМ. В результате в АОМ формировалась акустическая волна, под действием которой происходило изменение его диэлектрической проницаемости. При облучении АОМ световым пучком лазера на выходе АОМ создавалось световое поле, комплексная амплитуда которого содержала фазовую модуляцию, определяемую радиосигналом.
Непосредственно за АОМ располагалась линза, которая выполняла операцию одномерного преобразования Фурье в плоскости оптического гребенчатого фильтра ГФ. Оптический сигнал на выходе ГФ интегрировался линзой Л4, в выходной фокальной плоскости которой помещался фотоприемник ФП. С выхода ФП сигнал поступал на вход селективного вольтметра, выполнявшего функцию фильтра доплеровских частот, и далее на запоминающий осциллограф С8-13.
Для примера на рис. 23 приведен вид ГФ в оптическом диапазоне, а на рис.24 - осциллограммы сигнала на выходе узкополосного фильтра доплеровских частот при проходе целью участка дальности, на которую настроен гребенчатый фильтр.
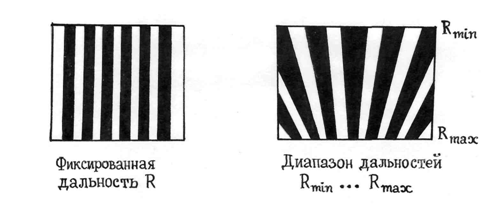
Рис. 23. Оптические гребенчатые фильтры.
Анализ полученных результатов показал, что с помощью гребенчатых фильтров может осуществляться селекция целей по дальности. При этом селекция движущихся целей может производиться по доплеровской частоте известными методами фильтрации.
Экспериментальные исследования также показали, что помехоустойчивость ШРЛС с ГФ выше, чем помехоустойчивость ШРЛС с последовательной СОС. При проведении испытаний полоса частот анализируемого сигнала Df была равна 80 МГц, а время его анализа Та составляло 20 мс. При указанных параметрах сигнала значение коэффициента подавления ШРЛС с ГФ в соответствии с формулой
 ,
,
(где kr=10 – коэффициент различимости), будет равно 52 дБ. Коэффициент подавления одноканальной ШРЛС с последовательной СОС, как было показано выше, составляет 23 дБ. Поэтому при подавлении ШРЛС с последовательной СОС воздействие помехового сигнала на ШРЛС с ГФ практически не ощущалось.
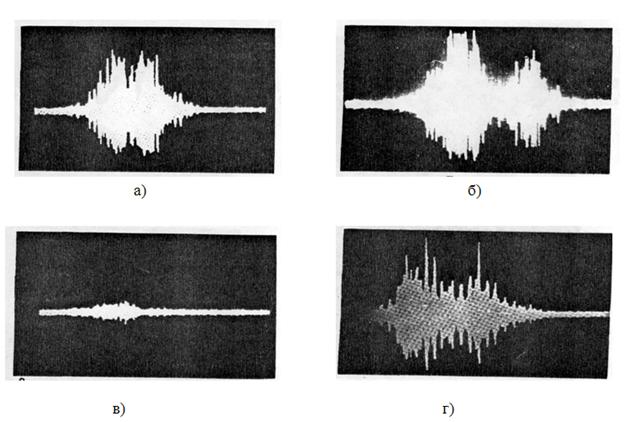
Рис. 24. Осциллограммы сигнала на выходе фильтра доплеровской частоты при движении в зоне дальности действия ГФ. Здесь: а – расстояние между целями 3 м; б – расстояние между целями – 6 м; б – расстояние между целями – 6 м; в- изображение сигнала на экране запоминающего осциллографа от движущейся цели (частота настройки фильтра не совпадает с доплеровской частотой); г - изображение сигналов на экране запоминающего осциллографа, полученные от двух целей с расстоянием между целями 3 м.
Для примера на рис. 24 показаны осциллограммы сигнала на выходе фильтра доплеровской частоты при движении цели в зоне дальности действия ГФ.
Таким образом, проведенные экспериментальные исследования подтвердили возможность и целесообразность использования ГФ для обработки сигналов в ШРЛС, соответственно и можно также сделать следующие выводы.
1. По сравнению с РЛС, в которых используются простые зондирующие сигналы, РЛС с шумоподобными сигналами имеют следующие преимущества:
- применение сложных зондирующих сигналов за счет увеличения длительности позволяет увеличить их энергию, не изменяя ширины спектра. При этом максимальная дальность действия РЛС может быть увеличена без ухудшения её разрешающей способности по дальности.
- расширение спектра зондирующего сигнала заданной длительности и фиксированной средней мощности позволяет повысить точность измерения дальности до цели и затрудняет обнаружение факта работы РЛС средствами радиотехнической разведки (РТР) противодействующей стороны.
- сложные широкополосные зондирующие сигналы позволяют улучшить разрешающую способность РЛС по дальности и скорости, что, в свою очередь приводит к повышению их помехозащищенности от распределенных пассивных помех.
2. При использовании в РЛС широкополосного зондирующего сигнала для получения аналогичных характеристик обнаружения представляется возможным излучать меньшую мощность. Так как отношение сигнал/шум на выходе устройства оптимальной обработки сигнала определяется выражением 2Е/N0, то за счет увеличения длительности сигнала требуемое значение его энергии может быть получено при меньшем значении мощности.
3. Применение широкополосных зондирующих сигналов затрудняет противнику создание эффективной заградительной шумовой помехи, так как с увеличением полосы частот помехи (при согласовании её по частоте со спектром сигнала) для создания необходимой спектральной плотности мощности помехи потребуется большая средняя мощность источника помехи.
4. При воздействии на РЛС с широкополосным зондирующим сигналом узкополосной помехи эффективным способом борьбы с такой помехой является режектирование участка спектра, пораженного этой помехой.
5. На основе анализа энергетических характеристик сигнала и помех, а также проведеной оценки помехоустойчивости шумовых РЛС со спектральной и корреляционной обработкой сигналов получено, что в ШРЛС отношение сигнал/шум определяется базой зондирующего сигнала. При этом, в зависимости от варианта построения ШРЛС, при базе сигнала, равной 106, энергетический выигрыш по сравнению с импульсными РЛС может составлять 30…40 дБ.
6. По информативности ШРЛС со спектральной обработкой сигналов не уступают ШРЛС с корреляционной обработкой сигнала, но отличаются простотой реализации. Энергетический проигрыш по сравнению с ШРЛС с корреляционной обработкой сигнала составляет: для одноканальной ШРЛС - 8,5…10 дБ; для двухканальной ШРЛС - 6 дБ; для рециркуляторной ШРЛС - 3…5 дБ.
7. Проведенные оценки показали, что при прочих равных условиях и высоких значениях вероятности обнаружения шумовые РЛС по дальности действия превосходят существующие импульсные РЛС в 1,5…2 раза и характеризуются существенно более высокой скрытностью работы.
8. Проведена оценка скрытности и помехоустойчивости импульсных и шумовых РЛС при одинаковых дальности разведки, секторе разведки и скорости сканирования ДНА по показателям "относительная скрытность" и относительная площадь разведки".
Показано, что скрытность шумовых РЛС существенно превышает скрытность импульсных. Шумовая РЛС с дальностью действия 15 км не обнаруживается средствами РТР, удаленными от нее на 5…30 км по дальним боковым лепесткам. Импульсная РЛС с такой же дальностью действия обнаруживается средствами РТР во всех случаях.
9. Получено, что в условиях воздействия активных помех с энергетическим потенциалом 105 Вт по показателю "относительная площадь разведки" шумовая РЛС в 3,5 раза превосходит импульсную.
10. Проведенные эксперименты и оценки показали, что широкополосные РЛС с шумовыми и шумоподобными сигналами с большой базой обладают существенными преимуществами перед обычными импульсными РЛС по скрытности работы и помехоустойчивости, что указывает на целесообразность их использования для решения задач различного, в том числе и оборонного назначения.
5. Предложения по технической реализации устройств обработки шумовых РЛС со спектральной обработкой сигналов
Известно, что применение того или иного способа обработки зондирующего сигнала в РЛС имеет свои особенности и определяется выполнением ряда требований. Применительно к РЛС разведки наземных движущихся объектов (РНДО) техническая реализация способа не должна приводить к существенному увеличению массы и габаритов аппаратуры и усложнению условий эксплуатации РЛС [16-18].
В ШРЛС РНДО с дальностью действия до 3 км для обработки сигналов может быть использован последовательный спектральный анализ. Основными элементами таких РЛС являются ВЧ и НЧ анализаторы спектра.
Оценка возможностей практической реализации указанных анализаторов в ШРЛС показала, что они могут быть изготовлены с использованием современной элементной базы при допустимых массе и габаритах.
В ШРЛС РНДО, дальность действия, которых превышает 3 км, для обработки сигналов в качестве высокочастотного анализатора спектра целесообразно использовать гребенчатые фильтры.
Существенным преимуществом ШРЛС с ГФ, по сравнению с ШРЛС с корреляционной обработкой сигналов, является возможность ее практической реализации без использования СВЧ линий задержки.
Одним из возможных вариантов реализации ШРЛС с ГФ является ШРЛС с импульсным преобразованием частоты. Однако, в дальнейшем более перспективными следует считать аналоговые многофункциональные устройства, реализуемые на основе акустооптического эффекта и цифровые устройства обработки сигналов.
Использование данных устройств обработки сигналов в ШРЛС с ГФ позволит реализовать многоканальную обработку при малом весе и габаритах.
Известно, что общее число доплеровских фильтров в НЧАС равно произведению числа дальномерных каналов на число каналов разрешения по скорости.
Так при длине волны l=8 мм и времени анализа сигнала Та= 5 мс для обнаружения целей, скорость движения которых 5…60 км/час, в каждом дальномерном канале необходимо иметь 20 доплеровских фильтров. Если число дальномерных каналов равно 1000, то общее число доплеровских фильтров будет равно 20000. Для реализации такого числа фильтров может быть использован блок цифровой обработки сигналов (БЦОС), структурная схема которого приведена на рис. 25.
Для оценки объема БЦОС были приняты следующие исходные данные:
- максимальная доплеровская частота – 5 кГц;
- динамический диапазон сигналов на входе БЦОС – 60 дБ;
- число дальномерных каналов N = 1000;
- время обработки сигналов Т0< 100 мс;
- время накопления ПЗС матрице Та= 5 мс.
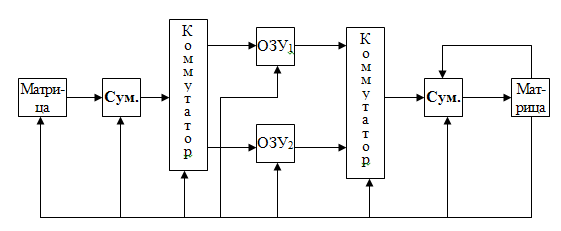
Рис. 25. Блок цифровой обработки сигналов.
При выбранных параметрах время обработки сигнала в одном дальномерном канале Тоi будет равно
![]() .
.
Объем выборки М определяется из выражения
М³ Та 2 fдmax=5*10-3*2 *5*103³50.
Для упрощения реализации алгоритма в процессоре БПФ объем выборки М должен быть кратным 2. Поэтому выбираем М=64.
Период дискретизации АЦП Dtд при считывании с матрицы ПЗС определяется как
 .
.
Разрядность АЦП определяется с учетом динамического диапазона входных сигналов и для обеспечения Д=60 дБ может использован 10-ти разрядный АЦП.
В качестве коммутатора могут быть использованы аналоговые микросхемы либо коммутаторы, выполненные на цифровых интегральных микросхемах. Для совмещения режимов съема информации с матрицы ПЗС и обработки сигналов в процессоре БПФ должны использоваться две ОЗУ, объемом 640 бит.
Процессор БПФ должен выполнять 64-х точечные дискретные преобразования Фурье (ДПФ) за время, не превышающее Toi=100 мкс. Отсюда время выполнения базовой операции tбо в процессоре БПФ должно быть порядка
 .
.
В настоящее время процессор с таким быстродействием может быть реализован в объеме 0,1 литра.
Процессор обработки информации (ПОИ) предназначен для обнаружения целей, измерения их координат и параметров по данным процессора БПФ. Время решения задачи первичной обработки информации в процессоре определяется временем обработки сигнала в одном дальномерном канале Тоi. Упрощенный алгоритм ПОИ заключается в поиске коэффициента Фурье, превышающего заданное пороговое значение, определении номера этого коэффициента и вычислении по номеру коэффициента радиальной скорости движения цели.
Ориентировочно такой алгоритм работы потребует 50…100 элементарных операций. Отсюда требования к быстродействию процессора ПОИ – 0,5-1 млн. операций в секунду. Процессор с таким быстродействием может быть реализован в объеме 0,075 литра.
Таким образом, БЦОС, предназначенный для обработки сигналов в ШРЛС, может быть реализован на современной базе в объеме 0,2 литра. Потребляемая мощность при использовании интегральных микросхем К-МОП технологии будет составлять не более 20 мВт.
Из изложенного следует, что масса и габариты рассмотренных ШРЛС, реализованных на основе современной элементной базы, по массе и габаритам в первом приближении будут существенно меньше устройств обработки существующих РЛС РНДО.
Проведенные в работе теоретические и экспериментальные исследования позволили провести оценку ожидаемых характеристик РЛС РНДО, которые приведены в табл. 6.
Оценки указанных характеристик проводились применительно к двухканальному варианту ШРЛС. Это объясняется тем, что несмотря на энергетический проигрыш (1…3 дБ) рециркуляторной ШРЛС, в таких ШРЛС реализуется квазинепрерывный режим излучения и приема зондирующего сигнала. Принцип действия рециркуляторной ШРЛС такую возможность не обеспечивает.
Из приведенных в табл. 6 данных видно, что шумовые РЛС с базой сигнала, равной 106, будут превосходить существующие РЛС РНДЦ по помехоустойчивости – на 20…25 дБ, по дальности скрытной работы – в 30…40 раз, по разрешающей способности – в 7…15 раз и отвечать современным требованиям по помехозащищенности, предъявляемым к перспективным РЛС.
Литература
1. Фадеев A.M. Шумовые радиолокационные системы, (Обзор), "Зарубежная радиоэлектроника", 1968, № 4.
2. Бульнин Л.Ф., Щербаков В.И. О возможности построения шумовых РЛС с непрерывным излучением. Вопросы спецрадиоэлектроники, серия РЛТ, 1972, вып. 14.
3. Архипов Л. И. Использование шумовых и шумоподобных сигналов в системах ближней радиолокации. Изд-во ЦНИИ научнотехнической информации и технико-экономических исследований, 1975.
4. Волжин А.Н., Кузьмичев В.Е., Кислов В.Я. и др. Способ радиолокации со спектральной обработкой сигналов. Авторское свидетельство № 792183 от 1.9.80.
5. Кузьмичев В.Е., Романовский А.С., Хачевский В.А., Якимчук Ю.В. Шумовая РЛС с селекцией движущихся целей. А.с. № 181539 от 2.12.82 г.
6. Кузьмичев В.Е., Романовский А.С., Хачевский В.А., Якимчук Ю.В. Шумовая РЛС с селекцией движущихся целей. Авторское свидетельство № 181539 от 2.12.82 г.
7. Быстров Р.П., Дмитриев В.Г., Потапов А.А., Соколов А.В. Проблемы радиолокационного обнаружения малоконтрастных объектов. / Вопросы перспективной радиолокации. Коллективная монография. Под ред. А.В. Соколова. – М.: Радиотехника, 2003. – 512 с.
8. Кузьмичев В.Е., Хачевский В.А. Шумовые РЛС со спектральной обработкой сигналов гребенчатыми фильтрами. / XII Международная конференция по спиновой электронике и гировекторной электродинамике. 19-21 декабря 2003 г., Москва (Фирсановка), - с.521-522.
9. Чапурский В. В. Широкополосные и сверхширокополосные сигналы и системы. // - М.: Сборник статей, Изд-во МГТУ им. Н. Э. Баумана, 2012. - С. 114-122.
10. Чапурский В. В. Избранные задачи теории сверхширокополосных радиолокационных систем. //. - М. : Сборник статей, Изд-во МГТУ им. Н. Э. Баумана, - Библиогр.: - ISBN 978-5-7038-3525-8, 2012. - с. 273-279
11. Залогин Н.Н., Калинин В.И., Скнаря А.В. Активная локация с использованием широкополосных хаотических сигналов. // Журнал «Радиоэлектроника. Наносистемы. Информационные технологии», 2011. – с.3-17.
12. Калинин В.И. Спектральная интерферометрия широкополосными шумовыми сигналами. // Журнал «Радиоэлектроника. Наносистемы. Информационные технологии», 2014. – с. 12-18.
13. Paulraj A.J, Gore D.A., Nabar R.U. and Bolcskei H. An overview of MIMO Communications-A key to gogabit wire less, Proc. IEEE, vol. 92, no. 2, Feb. 2004.
14. Калинин В.И. Спектральная модуляция широкополосных шумовых сигналов, – Радиотехника и электроника. 1996. Т. 41. No 4.
15. Kalinin V.I., Panas A.I., Kolesov V.V., Lyubchenko V.Ev.Ul - tra Wideband Wireless Communication on the Base of Noise Technology, MIKON-2006, Poland, Krakow, May 22-24, 2006, Conf. Proc., Vol. 2.
16. Быстров Р.П., Кузьмичев В.Е. Радиолокационное обнаружение объектов шумоподобными сигналами с большой базой. Коллективная монография. «Обнаружение и распознавание объектов радиолокации» /Под ред.А.В. Соколова. // –М.: «Радиотехника», 2007. – 175 с.
17. Быстров Р.П., Кузьмичев В.Е., Соколов А.В. Характеристики обнаружения шумовых РЛС. // Труды XV Международной конференции по спиновой электронике и гировекторной электродинамике, 2007. – с. 104-106.
18. Ксендзюк А. В. Использование шумоподобных сигналов в радиолокационных системах дистанционного зондирования, «Электромагнитные волны и электронные системы».№ 9-10 2004 г. – с. 11-18.