UDC 621.373, 519.622
ACCURACY ESTIMATION OF THE NUMERICAL METHODS OF THE ANALYSIS OF THE RELAXATION OSCILLATOR
A. M. Pilipenko, V. N. Biryukov
Southern Federal University, Nekrasovsky 44, Taganrog 347922, Russia
The paper is received on November 6, 2013
Abstract. In the paper the modern numerical methods for solving ordinary differential equations are testing. These methods are widely applied in simulators of RF circuits. As a test problem the relaxation oscillator’s differential equation with arbitrary polygonal nonlinearity was selected. An estimation of accuracy of numerical methods is received in the case of simulation of the relaxation oscillator. It is shown that the error of solution is determined by the methodological error and random errors caused by 1) an error of synchronization of the numerical solutions with the period of oscillation, 2) changes in the current step. It is shown that the random error of the RADAU method far exceeds the same error of the BDF method.
Keywords: numerical methods, nonlinear differential equations, relaxation oscillator, error analysis.
1. Introduction
Computer modeling of RF circuits and devices in the time domain consists in the numerical solution of systems of ordinary differential equations (ODE). In modern packages of circuit design and automation of engineering calculations, a large number of numerical methods for solving ODE are implemented. The main criteria for the effectiveness of numerical methods are their computational complexity and the accuracy of the solutions obtained. The accuracy of computer simulation quantitatively characterizes the degree of deviation of the simulation results from the exact results. For a theoretical assessment of the accuracy of numerical methods for solving ODE linear ODEs are used as a rule, for which an exact solution is known. Real radio engineering devices are described by nonlinear ODEs, therefore, assessing the accuracy of their numerical analysis is a quite complicated task.
In [1], a study was carried out of the accuracy of modern numerical methods in the analysis of harmonic oscillation generators. This article is a continuation of [1] as applied to another class of self-oscillating circuits — relaxation oscillation generators. The aim of this work is to assess the accuracy of modern numerical methods for solving ODEs in the simulation of relaxation generators.
The choice of the problem of analysis of the generator of relaxation oscillations as a test is due to the following reasons. Firstly, a relaxation generator is an integral part of many electronic devices, such as functional generators, radio measuring devices, counters, timers, devices that initiate measurements or technological processes [2]. Secondly, the task of numerically analyzing a relaxation generator in the time domain is one of the most difficult for computer modeling, since the ODEs describing a self-oscillator is often both oscillatory and stiff [3]. Thus, an assessment of the accuracy of the numerical analysis of the relaxation generator is necessary to select the most effective method for modeling self-oscillating systems with varying degrees of stiffness.
2. Model of relaxation generator
Relaxation oscillations occur in nonlinear electrical circuits that do not have frequency selectivity. The simplest circuit model of a relaxation generator can be presented as well as a model of a harmonic oscillation generator — in the form of a parallel connection of three elements — a linear capacitance C and an inductance L and a nonlinear resistive element whose differential resistance (conductivity) can change its sign [1].
The mathematical model of the relaxation generator (self-oscillator equation) has the form of a nonlinear differential equation of the second order:
 (1)
(1)
where v is the voltage at the generator
output, ![]() is the resonant frequency of the LC
circuit, G(v) = di(v) / dv
is the differential conductivity of the nonlinear element, i (v)
is the I – V characteristic of the nonlinear element.
is the resonant frequency of the LC
circuit, G(v) = di(v) / dv
is the differential conductivity of the nonlinear element, i (v)
is the I – V characteristic of the nonlinear element.
If the differential conductivity G (v) in the initial portion of the I – V characteristic near zero takes a negative value, then self-oscillations occur in the LC circuit. When approximating the I – V characteristic of a nonlinear element by a third-degree polynomial i(v) = a1v + a3v3 (a1<0, a3 > 0), equation (1) is called the Van der Pol equation and its analytical solutions are known for the steady state. Unfortunately, the solution cannot be obtained explicitly, and there are only standard numerical solutions specially calculated with high accuracy for some parameters of the equation [4].
To obtain an analytical solution of the oscillator equation in the steady state, one can use the technique proposed in [5]. This technique consists in applying a piecewise linear approximation of the I – V characteristic of a nonlinear element. This approach allows us to determine the stationary solution of the oscillator equation with relative error about 10-16.
The relaxation generator is characterized by significant losses that can be estimated by damping factor
![]()
where ![]() is the characteristic conductivity
of the LC-circuit, G1 is the differential conductivity of a
nonlinear element at di / dv > 0.
is the characteristic conductivity
of the LC-circuit, G1 is the differential conductivity of a
nonlinear element at di / dv > 0.
In the case of significant losses, d > 2 and the solution of a linear homogeneous second-order differential equation is described by the sum of two exponential functions. Thus, when using a symmetric piecewise linear function to approximate the I – V characteristic of a nonlinear element, the analytical expression for the voltage at the output of the relaxation generator in the steady state has the form [1]
 (2)
(2)
where A1, A2,
A3, A4 are the integration
constants; t0 is the point in time at which the
conductivity of the nonlinear element changes sign; T is the period of
oscillation; ![]() ;
; ![]() are time constants of the
oscillator at G (v) = G0 < 0 and G
(v) = G1 > 0, respectively; d0,1 =
| G.0,1 / 2C |
are time constants of the
oscillator at G (v) = G0 < 0 and G
(v) = G1 > 0, respectively; d0,1 =
| G.0,1 / 2C |
Fig. 1 shows the exact stationary solutions of the oscillator equation obtained using expression (2) for two different attenuation values d = 4 (solid line) and d = 100 (dashed line), the values of the remaining parameters of the oscillator were set as follows: L = 1 H, C = 1 F, G0 = - 4 S.
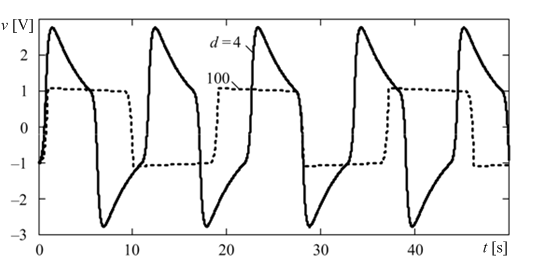
Fig. 1. Exact stationary solutions of the oscillator equation.
It should be noted that for d = 4, the self-oscillator model (1) can be considered weakly stiff, since in this case the stiffness coefficient is equal to the ratio of the maximum and minimum self-generator time constants η = τmax / τmin ≈ 10 > 1. For d = 100, the model (1) is stiff, since in this case η ≈ 104 >> 1.
The obtained analytical solutions make it possible to estimate the main oscillation parameters at the output of the oscillator with a relative accuracy of about 10 -14. Table 1 shows the exact amplitudes Am0 and the exact frequencies fm0 of the relaxation oscillations shown in Fig. 1.
Table 1
|
d |
η |
Am0 [V] |
f0 [Hz] |
|
4 |
10 |
2.765625375929214 |
0.09132317033942401 |
|
100 |
10000 |
1.084334602144661 |
0.05506258511132066 |
3. Numerical solution of the oscillator equation
In this paper, we estimated the accuracy of modeling the relaxation generator in the time domain using three numerical methods for solving ODE: the trapezoid (TR), BDF, and RADAU5 methods. A detailed description of these methods is given in [6, 7]. The choice for the numerical analysis of the TR and BDF methods is explained by the fact that they are the main methods for the analysis of transients in electronic simulators. The RADAU5 method is one of the most promising methods of the Runge-Kutta type for solving stiff problems [7]. It should be noted that the RADAU5 method is three-stage, therefore, its application is reduced to solving a system of algebraic equations, the order of which is three times the order of the ODE of a given circuit. The TR and BDF methods are one-stage, thus, the computational complexity of these methods, which determines the computer time and RAM to obtain a solution, is minimal. Multistage methods have increased L-stability and are recommended for solving problems of high stiffness [8, 9].
To assess the accuracy of the above numerical methods, we apply the technique proposed in [10] and based on the analysis of the accuracy of the assessment of the main parameters of the generated oscillation - frequency and amplitude. The current relative errors in the estimation of frequency and amplitude are respectively determined using the following relations
 ,
,  ,
,
where f(t) and Am(t) are estimations of the frequency and amplitude of the generated oscillation obtained from solving equation (1) by numerical methods.
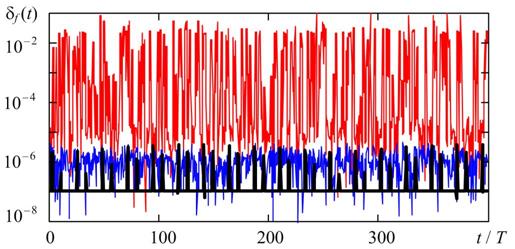
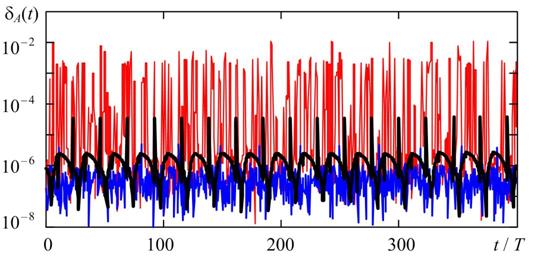
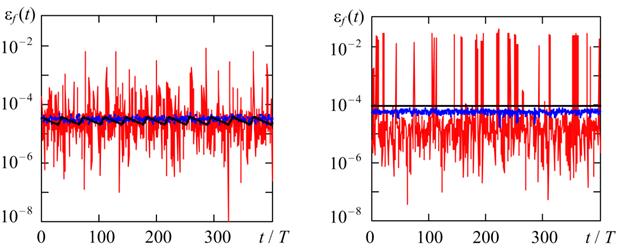
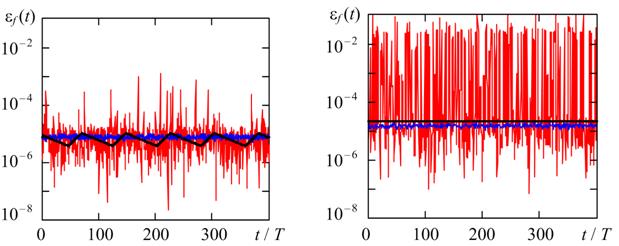
Figures 2 and 3 show the time diagrams of the relative errors in estimating the frequency and amplitude of the stationary oscillations of the relaxation generator for various attenuation and, accordingly, the stiffness of the oscillatory system (see table 1). The equation (1) was solved by the numerical methods listed above for a given maximum step hmax = T/1000 and the maximum acceptable relative error TOL = 10-5. To estimate the oscillation frequency, we used linear interpolation of the numerical solution at the points of sign change v(t), and to estimate the amplitude, we used the quadratic interpolation at points of local extrema. The observation interval is selected corresponding to the stationary generation mode.
Fig. 2 and Fig> 3 show the process parameters fm(t) and Am(t) vary significantly from one period to another. For a quantitative description of the results obtained in table 2 shows the average values of the relative errors in estimating the frequency and amplitude of oscillations (mεω and mεA, respectively) and standard deviations (RMS) of the relative errors in estimating the frequency and amplitude of oscillations (σεω and σεA, respectively).
(a) (b)
Fig.
2. Current relative errors in estimating the frequency of relaxation
oscillations using the TR, BDF, and RADAU5
methods
with hmax = T/1000, TOL = 10-5, and various stiffness of
the oscillator model. η = 10 (a) and η = 104 (b).
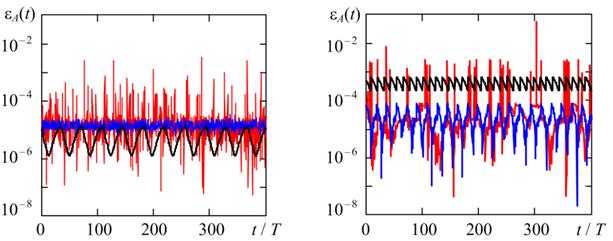
(a) (b)
Fig. 3. Current relative errors in estimating the amplitude of relaxation oscillations as in the case of Fig. 2
Table 2
|
η |
10 |
10 4 |
||||
|
Метод |
TR |
BDF |
RADAU5 |
TR |
BDF |
RADAU5 |
|
mεω |
2.7·10-5 |
3.1·10-5 |
1.2·10-4 |
8.7·10-5 |
5.5·10-5 |
1.7·10-3 |
|
σεω |
4.8·10-6 |
4.5·10-6 |
5.1·10-4 |
1.7·10-6 |
7.2·10-6 |
5.8·10-3 |
|
mεA |
5.6·10-6 |
1.4·10-5 |
4.7·10-5 |
4.0·10-4 |
2.6·10-5 |
2.2·10-4 |
|
σεA |
3.7·10-6 |
4.2·10-6 |
2.1·10-4 |
1.3·10-4 |
1.9·10-5 |
2.3·10-3 |
The results of the numerical analysis shown in Fig. 2, Fig. 3 and in Table 2, show that the RADAU5 method, as a rule, has the largest values of relative errors both in estimating the frequency and in assessing the amplitude of relaxation oscillations, regardless of the stiffness of the problem. In addition, the current error values for the RADAU5 method can be one or two orders of magnitude higher than the similar errors of the BDF and TR methods. This effect is especially expressed when estimating the frequency in the case of high stiffness of the problem (see Fig. 2, b). In the case of weak stiffness of equation (1) (η = 10), the relative errors for the BDF and TR methods are of the same order of magnitude.
At high stiffness (η = 10 4), the current errors εf (t) and εA(t) turn out to be the smallest for the BDF method, and the average value of the error in estimating the amplitude for the BDF method is approximately 15 times lower than the corresponding value for the TR method. It should be noted that the errors of the BDF method depend most weakly on the stiffness of the problem in comparison with the errors of the other methods considered. As can be seen from Table 2, with an increase in the stiffness of the problem by a factor of 103, the relative errors for the BDF method increase no more than 4.5 times, while for the TR and RADAU5 methods they can increase more than 50 times.
It follows from Fig. 2 and Fig. 3 that for the TR and BDF methods, the effect of synchronization of the error with the period of generated oscillations can be observed. In this case, the current errors are, as a rule, periodic in nature, and the period of change in errors is a multiple of the period of generated oscillations. In addition to the “synchronization error”, the second random component is the error observed in the BDF and RADAU5 methods, caused by the step change algorithm in the solution process. To verify the correctness of the implemented accuracy assessment methodology demonstrated in Fig. 4 and Fig. 5 shows the current relative errors in estimating the frequency and amplitude of relaxation oscillations using the TR, BDF, and RADAU5 methods with a 2-fold decrease in hmax and a 4-fold TOL as compared to the case shown in Fig. 2 and Fig. 3.
(a) (b)
Fig.
4. Current relative errors of frequency estimation by the considered methods
for different stiffness
η = 10 (a) and η = 104 (b); hmax
= T/2000, TOL = 0.25 10 -5.
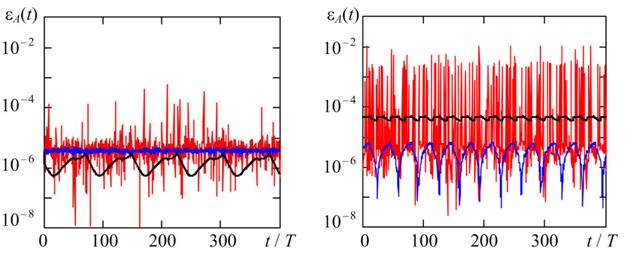
(a) (b)
Fig. 5. Current relative errors of amplitude estimation by the considered
methods for different stiffnes
η = 10 (a) and η = 104 (b); hmax
= T/2000, TOL = 0.25 10 -5.