УДК 621.396.67.012
Расширение динамического диапазона обработки входных сигналов в помеховом канале РЛС с АФАР
Н. С. Акиншин 2, Р. П. Быстров 1, А. В. Новиков 2
1 Институт радиотехники и электроники им. В.А. Котельникова РАН, г. Москва
2 ОАО ЦКБА, г. Тула
Статья получена 30 октября 2014 г.
Аннотация. Проведено рассмотрение и анализ особенностей устройства обнаружения гауссовских помех на базе многоканального автокомпенсатор помех. Предложен вариант одноканальной компенсации,с попеременным подключением и отключение компенсатора помех при просмотре зоны ответственности.
Ключевые слова: адаптивная фазированная антенная решетка (АФАР), автокомпенсатор помех, алгоритм обнаружения, диаграмма направленности антенны, динамический диапазон, помеховый канал.
Abstract. Peculiarities of a Gaussian noise detecting device on the basis of a multi-channel interference automatic equalizer were considered and analyzed. A variant of single-channel equalizing, not multi-channel, was suggested, with alternate enabling and disabling of interference equalizer while observing the area of responsibility.
Key words: adaptive phased array, interference automatic equalizer, antenna pattern, dynamic range, interference channel.
В настоящее время существует ряд алгоритмов, которые наряду с энергетическими характеристиками при принятии решения об обнаружении воздействия источника активных помех, анализируют также корреляционную информацию [1-3].
В качестве базового обнаружителя в этом случае может быть предложен обнаружитель, алгоритм работы которого реализуется на основе корреляционного автокомпенсатора, если в качестве опорного напряжения в корреляторе цепи отрицательной обратной связи использовать сигнал основного канала. При этом построение алгоритма обнаружения производится на основе решения следующей задачи.
Пусть группа из Nп
помехоносителей излучает сигналы ![]() , где
, где ![]() . Эти сигналы принимаются (М +
1)-канальной системой обнаружителя. Сигналы
. Эти сигналы принимаются (М +
1)-канальной системой обнаружителя. Сигналы ![]() и внутренние шумы каналов приема
и внутренние шумы каналов приема ![]() стационарны и эргодичны на интервале
наблюдения (0, Тн), их математическое ожидание и дисперсия
имеют вид:
стационарны и эргодичны на интервале
наблюдения (0, Тн), их математическое ожидание и дисперсия
имеют вид:
![]() (1)
(1)
![]() (2)
(2)
Излучаемые сигналы и внутренние шумы не коррелированы между собой
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
Знак * означает комплексно сопряженную величину.
Внутренние шумы каналов
представляют собой гауссовы процессы. Имеются выходы М + 1 антенн, одной
остронаправленной (основной) и М вспомогательных, менее направленных с
диаграммами направленности соответственно ![]() и
и ![]() , где
, где ![]() В направлении главного лепестка основной антенны
диаграммы направленности (ДН) вспомогательных антенн имеют провал.
В направлении главного лепестка основной антенны
диаграммы направленности (ДН) вспомогательных антенн имеют провал.
В течение интервала наблюдения (0, Тн), много большего времени корреляции рассматриваемых напряжений, положение целей относительно антенн неизменно:
![]() (6)
(6)
Принятие решения об обнаружении производится на основе решения следующей задачи.
Имеются две гипотезы:
гипотеза Н0, согласно которой сигналы на выходе антенн представляют собой излучения, принятые от помехоносителей, находящихся в области боковых лепестков ДН основной антенны, и внутренние шумы каналов;
гипотеза Н1, согласно
которой на выходе основной антенны присутствует дополнительно напряжение – ![]() от источника излучения,
находящегося в главном луче.
от источника излучения,
находящегося в главном луче.
Выходы антенн при справедливости гипотез Н0 и H1 запишутся:
 (7)
(7)
Обозначим
 (8)
(8)
![]() – матрица, определяемая из соотношения
– матрица, определяемая из соотношения
![]() (9)
(9)
где δ(t1, t3) – дельта-функция;
R(t1, t3) – корреляционная матрица внутренних шумов;
I – единичная матрица.
Пользуясь предположением о гауссовом распределении внутренних шумов и с учетом промежуточных выкладок [4] логарифм функционала правдоподобия можно записать в виде выражений:
![]() (10)
(10)
![]() (11)
(11)
где
![]()
Формально задача принятия
решения об истинности гипотезы H0 или H1
становится задачей проверки сложных гипотез, где неизвестными параметрами
являются ![]() и
и ![]() .
.
Существуют различные подходы к ее решению [5-7]. Как правило, пользуются обобщенным критерием правдоподобия Неймана-Пирсона [7], согласно которому осуществляется оптимальная оценка неизвестных параметров в предположении, что верна гипотеза Н0, затем – в предположении, что верна гипотеза Н1, а далее рассматривается отношение правдоподобия при полученных оценках параметров.
Обобщенный критерий отношения правдоподобия запишется в виде
 (12)
(12)
где θ1 пробегает все возможные значения θ по гипотезе H1, a θ0 – все возможные значения θ по гипотезе Н0.
Из-за монотонности
функции логарифма максимум ![]() совпадает
с максимумом
совпадает
с максимумом ![]() , из чего
можно записать
, из чего
можно записать
![]() (13)
(13)
После подстановки в (13) выражений (11) и (12) обобщенный критерий правдоподобия сводится к сравнению с порогом выражения
 (14)
(14)
при оптимальных по максимуму правдоподобия оценках, входящих в него неизвестных параметров. Из-за предположения о гауссовом законе распределения внутреннего шума оценки по максимуму правдоподобия совпадают с оценками по минимуму средних квадратов. С другой стороны, известно [5], что оптимальная оценка по минимуму средних квадратов совпадает с условным математическим ожиданием, т.е.
 (15)
(15)
С учетом того, что операцию нахождения математического ожидания можно представить операцией интегрирования, выражение (15) запишем в виде:
 (16)
(16)
Следовательно, рассматриваемый алгоритм оптимальной обработки можно записать в виде:
![]() (17)
(17)
Как следует из (17),
задача оптимального обнаружения включает оптимальную фильтрацию случайных
процессов ![]() и
и ![]() по выходам от основной и
вспомогательной антенн
по выходам от основной и
вспомогательной антенн ![]() .
.
Интеграл
![]() (18)
(18)
характеризует энергию обнаруживаемого сигнала. Его целесообразно рассматривать как оценку ожидаемого сигнала и отнести к порогу.
Одним из основных предположений при построении оптимального алгоритма было предположение о структуре антенной системы: имеются остронаправленная антенна и несколько слабонаправленных, причем в направлении главного максимума ДН основной антенны во вспомогательных антеннах обеспечивается существенное подавление сигналов. Как показано в работе [1], в таком случае оптимальная оценка обнаруживаемого сигнала заключается в когерентной компенсации коррелированных в различных каналах помех:
![]() (19)
(19)
Один из способов, реализующих принцип когерентной компенсации доминирующих источников помех с целью обнаружении слабомощных источников, рассмотрен в [2]. Расширение динамического диапазона помехового канала на 7....8 дБ при этом достигается за счет аппаратурного решения: применения многоканального автокомпенсатора помех и последовательной обработки сигнала основного канала в каналах корреляционного автокомпенсатора помех (АКП). Каждый одноканальный автокомпенсатор помех (АКП) своим вспомогательным каналом подключен к выходу одной из вспомогательных антенн, а основной канал последующего АКП подключен к выходу предыдущего [8]. Функциональная схема устройства обнаружения помех на базе многоканального АКП приведена на рис. 1.
При таком включении в
каждом вспомогательном канале напряжение, необходимое для компенсации сигнала
в основном канале, не будет превышать величины сигнала основного канала, то
есть требования к вспомогательному каналу не будут превышать требования к основному
каналу.
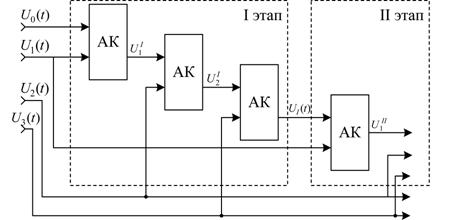
Рис. 1. Функциональная схема устройства обнаружения помех на базе
многоканального АКП
Однако, мешающий сигнал в основном канале после прохождения последнего каскада АКП хотя и уменьшится, но останется нескомпенсированным, если имеется взаимная корреляция между сигналами вспомогательных антенн. Поэтому такую же последовательную обработку необходимо повторять в каскадах второго и следующих этапов обработки. С завершением каждого очередного этапа нескомпенсированный сигнал уменьшается.
Основными недостатками такой схемы являются:
необходимость создания и подключения к РЛС специального многоканального АКП, что невозможно осуществить без значительных дополнительных финансовых затрат;
зависимость скорости убывания величины остатка нескомпенсированного сигнала от степени корреляции сигналов вспомогательных каналов между собой;
предполагаемое постоянное использование автокомпенсатора помех при работе основного (помехового) канала.
В этом случае уменьшение интенсивностей воздействующих источников помех наряду с расширением диапазона помехового канала (ПК) может приводить (при воздействии относительно равномощных источников) к снижению вероятности их обнаружения. Кривая оценки вероятности обнаружения источника помех Роб пп в зависимости от отношения мощности обнаруживаемого источника к мощности мешающего (q = Uпв / Uш) приведена на рис. 2.
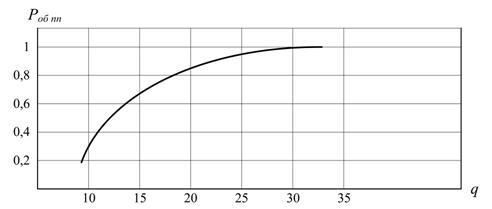
Рис. 2. Зависимость вероятности Роб
пп от отношения q = Uпв / Uш
Вместе с тем, как показал анализ структурно-алгоритмической схемы систем помехозащиты (ПЗ), у современных РЛС с АФАР имеется дополнительная возможность повышения эффективности работы ПК, если для расширения динамического диапазона использовать не чисто аппаратурный, а аппаратурно-алгоритмический метод. Такой метод позволяет расширить динамический диапазон ПК, но не имеет указанных выше недостатков.
В этом случае для уменьшения интенсивностей воздействующих источников помех с максимальной мощностью сигнала представляется целесообразным использовать вариант не многоканальной компенсации, а одноканальной с попеременным подключением и отключение компенсатора помех при просмотре зоны ответственности [1].
Суть метода заключается в следующем:
1. В штатном режиме по результатам дискретного обзора зоны действия помехового канала определяются значения интенсивностей помеховых сигналов с каждого направления (Вi). Измеренные значении интенсивностей помех запоминаются в массиве помехового рельефа (МПР).
2. На основании полученных данных рассчитывается величина нижнего порога обнаружения ПК:
![]() (20)
(20)
где Δ – константа.
3. Определяются угловые направления (азимут, угол места), соответствующие элементам массива помехового рельефа, для которых выполняется условие:
![]() (21)
(21)
где Bi – значения уровней помех i-го направления из МПР.
Если условие (21) выполняется, то считается, что на данных направлениях находятся источники активных помех. Полученные таким образом значения координат помехопостановщиков запоминаются.
4. При наличии мощной помехи повторный обзор зоны ответственности РЛС производится ПК с включенным компенсатором помех, который в течение всего повторного обзора производит компенсацию сигнала помехи, действующей с направления, соответствующего максимальному помеховому сигналу в ранее полученном МПР.
5. По результатам второго (повторного) обзора зоны действия рассчитывается новое значение порога обнаружения
![]() (22)
(22)
где ![]() – максимальное значение из МПРп,
сформированного при 2-м обзоре; Δ = const.
– максимальное значение из МПРп,
сформированного при 2-м обзоре; Δ = const.
6. Зафиксированные в новом МПРп значения уровней помех сравниваются с порогом
![]() (23)
(23)
и определяются угловые координаты, соответствующие ячейкам МПР, для которых выполняется условие (23). Считается, что на данных направлениях находятся источники помех. Следовательно, во втором обзоре удалось обнаружить ряд "слабомощных" источников помех, которые невозможно было обнаружить в первом обзоре без снижения уровня ложных тревог.
7. Общее число обнаруженных источников помех целесообразно определять по результатам k-го и (k + 1)-го обзоров.
Увеличение времени обзора зоны ответственности вследствие дополнительного (повторного) просмотра можно избежать, увеличив вдвое число одновременно работающих приемных ПК, за счет перераспределения целевых, не способных в данных условиях качественно функционировать.
Таким образом, увеличение (расширение) динамического диапазона ПК РЛС с АФАР достигнуто за счет адаптивного управления порогом обработки входных сигналов с использованием АКП целевого канала на основе итерационного учета максимального помехового воздействия в смежных циклах обзора.
Данный метод позволяет осуществить расширение динамического диапазона одновременно обслуживаемых разномощных источников помех в РЛС на глубину компенсации доминирующей помехи автокомпенсатором помех (–15 дБ) [1].
Литература
1. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь. 1981.
2. Воробьев O.K., Мурзаханов З.Г., Ильинков В.М. Авторское свидетельство № 55128. 1969.
3. Алмазов В.Б., Ильинков В.М. Корреляционный пеленгатор постановщиков активных помех с малым уровнем боковых лепестков // Военная радиоэлектроника. 1970. № 3.
4. Фалькович С.Е. Оценка параметров сигнала. М.: Сов. радио. 1970.
5. Левин Б.Р. Теоритические основы статистической радиолокации. М.: Сов. радио. 1976.
6. Леман Э. Проверка статистических гипотез. М.: Наука. 1977.
7. Ван Трис Г. Теория обнаружения, оценок и модуляции. М.: Сов. радио. 1972...1977.
8. Панченко Г. В., Новиков А.В., Манаенков Е.В., и др. «Двухзеркальная антенна» МПК8 Н 01 G 19/18(2006.01) Патент 121085 РФ. Изобретения. Полезные модели. 2012. № 28.