ОБНАРУЖЕНИЕ ФЛУКТУИРУЮЩИХ МАЛОРАЗМЕРНЫХ ЦЕЛЕЙ НА ФОНЕ ФЛУКТУИРУЮЩЕЙ ПАССИВНОЙ ПОМЕХИ ПО НАБЛЮДЕНИЯМ ПОЛЯРИМЕТРИЧЕСКОЙ РСА
А. Н. Детков 1,
А. В. Никоненко
1, Д. А. Ницак
2
1 Главный научно-исследовательский испытательный центр робототехники Минобороны России, Москва
2 ВУНЦ
ВВС «ВВА им. Н.Е.Жуковского и Ю.А.Гагарина», Воронеж, Россия
Статья получена 14 сентября 2014 г.
Аннотация. В перспективных радиолокационных системах, использующих автоматическое обнаружение целей, селекция флуктуирующих малоразмерных целей (ФМЦ) на фоне пассивных помех представляет собой достаточно сложную задачу. Предложена вероятностная модель радиолокационного канала разностной обработки векторных наблюдений поляриметрической радиолокационной станции с синтезированной апертурой антенны (РСА), который позволит гарантированно обнаруживать флуктуирующие по поляризационным признакам малоразмерные цели на фоне флуктуирующей пассивной помехи. Показано, что из всех возможных ФМЦ можно извлечь две специфические (сингулярные) цели – максимально видимую и наиболее скрытую в данной пассивной помехе, что в целом повышает эффективность обнаружения малоразмерных целей.
Ключевые слова: обнаружение целей, флуктуирующая малоразмерная цель, поляриметрическая РСА.
Abstract. In looking radar systems using automatic target detection, selection fluctuating small-sized targets (FST) on the background clutter is a rather complicated task. We propose a probabilistic model of the radar channel difference vector processing observations polarimetric synthetic aperture radar (PolSAR), which will guarantee to detect fluctuating on polarization featured small-sized target to fluctuating background clutter. It is shown that among all possible FST can extract two specific (singular) purpose – maximum visible and most hidden in the clutter, which generally increases the efficiency of detection of small-sized targets.
Keywords: detection of targets, the fluctuating small-sized target, polarimetric SAR.
1. Введение
основой теории обнаружения стабильных и флуктуирующих целей на фоне пассивной помехи является теория обнаружения детерминированных и стохастических сигналов на фоне коррелированных помех [1, 2]. В случае векторных наблюдений при обнаружении радиолокационных целей в соответствии с этой теорией используются аналогичные алгоритмы скалярной радиолокации для гауссовской модели отражений [3]. В целом алгоритмы обработки векторных наблюдений являются обобщением более общих математических объектов, для которых, тем не менее, статистическое и физическое содержание итоговых результатов сохраняется. в [4] решена задача оптимальной поляризации антенны идеального радиолокатора с использованием матриц (векторов) рассеяния цели и априорных данных, а также определены граничные функции эффективности обнаружения поляриметрической РЛС некоторых классов флуктуирующих целей на фоне пассивной помехи. Эта же задача решена для обнаружения поляриметрической РСА квазистабильных малоразмерных целей на фоне подстилающей поверхности [5], причём разработке алгоритма обнаружения предшествовал анализ поляризационных портретов искусственных объектов и фона, полученных в результате математического моделирования [6]. Анализ поляризационных характеристик распределенных объектов показывает, что в параметрах поляризации рассеянной объектом волны содержатся вспомогательные информационные признаки, которые необходимо использовать в задачах пространственной (поляризационной) селекции.
Однако во всех этих случаях качество обнаружения флуктуирующей цели зависит от многих интегральных и еще большего числа физических параметров, что существенно затрудняет анализ влияния этих параметров (цели и помехи) на указанное качество. Затруднение определяется и тем, что связь параметров с вероятностями правильного и ложного обнаружения сложна и не однозначна. Так что максимизация какого-то из параметров не ведет или не обязательно ведет к улучшению вероятностных показателей [4].
Цель работы: разработка алгоритма функционирования радиолокационного канала в поляриметрической РСА при многолучевой обработке векторных наблюдений, который бы гарантировано повышал эффективность обнаружения флуктуирующих целей на фоне флуктуирующего фона с учётом априорного анализа поляризационных характеристик целей.
2. Обобщенная задача обнаружения флуктуирующей цели на фоне пассивной помехи
Данные поляриметрической РСА традиционно принято описывать комплексной матрицей рассеяния цели S [7]
 ,
,
согласованные (основные) компоненты
которой ![]() и
и ![]() в
общем коррелированны, в то время как корреляции между основными и кроссовыми
компонентами
в
общем коррелированны, в то время как корреляции между основными и кроссовыми
компонентами ![]() и
и ![]() или
или ![]() и
и ![]() (
(![]() ) практически отсутствуют (теоретически
строго нулевые) [8, 9]. Анализ изображений РСА отмечает наличие слабой корреляции
между основными и кроссовыми компонентами. Причиной такой взаимной корреляции,
как правило, являются: не идеальность развязки по кроссовой поляризации между
ортогональными каналами, тепловые шумы и неточности математического
моделирования. Для взаимного случая
) практически отсутствуют (теоретически
строго нулевые) [8, 9]. Анализ изображений РСА отмечает наличие слабой корреляции
между основными и кроссовыми компонентами. Причиной такой взаимной корреляции,
как правило, являются: не идеальность развязки по кроссовой поляризации между
ортогональными каналами, тепловые шумы и неточности математического
моделирования. Для взаимного случая ![]() вектор-наблюдение принимает
вид
вектор-наблюдение принимает
вид
![]() ,
,
где ![]() – знак
транспонирования. Для невзаимного случая, например в бистатических системах,
где
– знак
транспонирования. Для невзаимного случая, например в бистатических системах,
где ![]() размерность
размерность ![]() увеличивается
до 4. Если объектом наблюдения РСА является шероховатая поверхность с
достаточно большим числом элементарных отражателей, модель вектора
увеличивается
до 4. Если объектом наблюдения РСА является шероховатая поверхность с
достаточно большим числом элементарных отражателей, модель вектора ![]() имеет многомерное комплексное гауссово распределение
[10]
имеет многомерное комплексное гауссово распределение
[10]
где ![]() –
размерность вектора
–
размерность вектора ![]() ; C – комплексная корреляционная матрица
; C – комплексная корреляционная матрица  ,
, ![]() – знак
эрмитовой сопряженности;
– знак
эрмитовой сопряженности; ![]() – операция усреднения
по ансамблю реализаций. Вещественные и мнимые части координат m - мерного вектора
– операция усреднения
по ансамблю реализаций. Вещественные и мнимые части координат m - мерного вектора ![]() –
– ![]() ,
, ![]() ,
, ![]() , имеют нулевое математическое ожидание –
, имеют нулевое математическое ожидание – ![]() и удовлетворяют условиям аналитического
сигнала:
и удовлетворяют условиям аналитического
сигнала:
Данные РСА в целом удовлетворяют (1), однако основным фактором, затрудняющим дешифрирование радиолокационных изображений, в том числе обнаружение целей, являются спекл-шум, обусловленный интерференционными явлениями при суммировании сигналов от отдельных центров рассеяния («блестящих точек») в пределах каждого элемента разрешения. Наиболее эффективным способом снижения уровня спекл-шума в РСА является некогерентное суммирование изображений, полученных от одних и тех же участков местности с некоррелированными спекл-структурами в пределах интервала синтезирования. При цифровой обработке в РСА технически проще реализовать многоканальную (многолучевую) обработку сигналов по азимуту [11]. Статистические характеристики данных, полученных поляриметрическими РСА с учетом многолучевой обработки существенно отличаются от однолучевых. Выборочная корреляционная матрица, полученная усреднением реализаций N независимых субапертур (числа независимых наблюдений)
описывается комплексным распределением Уишарта [12, 10].
При обнаружении флуктуирующей цели вид решающей статистики определяется отношением
где K – матрица когерентности вектора ![]() , соответствующего отражению от флуктуирующей цели либо помехи (нижний
индекс матрицы – 0 соответствует индексу пассивной помехи, на фоне которой
решается задача обнаружения; нижний индекс матрицы – 1 соответствует индексу
обнаруживаемой цели). Использование в (4) вместо корреляционных матриц
, соответствующего отражению от флуктуирующей цели либо помехи (нижний
индекс матрицы – 0 соответствует индексу пассивной помехи, на фоне которой
решается задача обнаружения; нижний индекс матрицы – 1 соответствует индексу
обнаруживаемой цели). Использование в (4) вместо корреляционных матриц ![]() и
и ![]() матриц
когерентности объясняется выполнением условия (2). В этом случае решающее
устройство приемника должно вычислять и сравнивать с порогом квадратичный
функционал
матриц
когерентности объясняется выполнением условия (2). В этом случае решающее
устройство приемника должно вычислять и сравнивать с порогом квадратичный
функционал
Весовая матрица W, определяется формулой [6]
Основная статистика
алгоритма обработки наблюдений (5) для любого из
случаев при ![]() имеет существенно более сложное
распределение в сравнении с основной статистикой задачи обнаружения стабильных
целей [5], причём число обобщенных параметров, определяющих вероятность
правильного обнаружения
имеет существенно более сложное
распределение в сравнении с основной статистикой задачи обнаружения стабильных
целей [5], причём число обобщенных параметров, определяющих вероятность
правильного обнаружения ![]() , вероятность ложного обнаружения
, вероятность ложного обнаружения
![]() или значение порогового сигнала, здесь
практически всегда более двух.
или значение порогового сигнала, здесь
практически всегда более двух.
В [4] установлено, что
основная вероятностная характеристика обнаружения флуктуирующих целей на фоне
пассивных помех имеет общий вид ![]() , где
, где ![]() ,
, ![]() –
некоторые векторы, задающие две системы обобщенных (интегральных) параметров,
сложно связанных с исходными (физическими) параметрами отражений от обнаруживаемой
и мешающей целей. Эта связь сложна и неоднозначна. Максимизация какого-то из параметров
не всегда ведет к улучшению вероятностных показателей.
–
некоторые векторы, задающие две системы обобщенных (интегральных) параметров,
сложно связанных с исходными (физическими) параметрами отражений от обнаруживаемой
и мешающей целей. Эта связь сложна и неоднозначна. Максимизация какого-то из параметров
не всегда ведет к улучшению вероятностных показателей.
Вид распределения
статистики (5) определяется характеризационными свойствами W и ![]() [4]:
[4]:
1) матрица W является эрмитовой и строго положительно определенной;
2) координаты
вектора ![]() удовлетворяют (2).
удовлетворяют (2).
При этих условиях характеристическая функция статистики (5) имеет вид
 ,
,
где M – корреляционная матрица вектора ![]() (
(![]() при наличии в
при наличии в ![]() сигнальной компоненты и
сигнальной компоненты и ![]() – при её отсутствии); I – единичная матрица размерности
– при её отсутствии); I – единичная матрица размерности ![]() .
.
Произведение U = MW при эрмитовых М, W не обязательно является эрмитовым, но для
положительно определенных М и W это произведение имеет не только вещественные, но и
положительные собственные числа (СЧ) [13]. Двум значениям матрицы М
соответствуют два значения матрицы U: U0 и U1. Пусть ![]() обозначает совокупность {λ1, λ2,
... , λm} собственных чисел одного из вариантов матрицы U. Плотность распределения статистики
(5) можно записать в виде
[4]
обозначает совокупность {λ1, λ2,
... , λm} собственных чисел одного из вариантов матрицы U. Плотность распределения статистики
(5) можно записать в виде
[4]
Здесь подынтегральная функция задана
на комплексной плоскости – области задания переменной ![]() –
и имеет полюсы строго в нижней полуплоскости. Интеграл (7) вычисляется с помощью вычетов в сингулярных точках.
Число полюсов определяется числом L различных собственных чисел. Каждому k-кратному СЧ
–
и имеет полюсы строго в нижней полуплоскости. Интеграл (7) вычисляется с помощью вычетов в сингулярных точках.
Число полюсов определяется числом L различных собственных чисел. Каждому k-кратному СЧ ![]() соответствует
вычет вида
соответствует
вычет вида ![]() , где
, где ![]() – z-полином степени k –1. В результате f(z) оказывается экспоненциально-степенной функцией вида
– z-полином степени k –1. В результате f(z) оказывается экспоненциально-степенной функцией вида

Для конкретизации
(7) необходимо задать распределение СЧ λ1, λ2, ... , λm. Двум значениям матрицы U: U0 и U1
соответствуют две совокупности СЧ ![]() и
и ![]() , которые определяют две плотности
вероятности распределения статистики (4)
, которые определяют две плотности
вероятности распределения статистики (4) ![]() и
и ![]() .
Первая плотность соответствует фону, вторая – фону и цели. Вероятности
.
Первая плотность соответствует фону, вторая – фону и цели. Вероятности ![]() и
и ![]() определяются
формулами:
определяются
формулами:
где порог ![]() подбирается
по заданной величине
подбирается
по заданной величине ![]() .
.
Наиболее простыми с точки
зрения расчетов (9) с
учётом (7) является случай
некратных СЧ λ1, λ2, ... , λm (наиболее частый случай,
применительно к сложным объектам рассеяния). Тогда все полиномы (8) ![]() ,
, ![]() являются константами:
являются константами:
 ;
; 
и интегралы (9) приводятся к простому виду
 .
.
Для случая невзаимной
поляриметрической РСА при разных ![]() ,
, ![]() интеграл (7) принимает вид
интеграл (7) принимает вид

где
 ;
;  ;
;
![]() ;
;  ;
;
 .
.
при сильной взаимной корреляции
основных компонент вектора рассеяния ![]() и также при снижении мощности
кроссовых составляющих (составляющей) до уровня внутренних шумов аппаратуры
возможна трансформация входной статистики. следствием
этого является вырождение матрицы когерентности (появление СЧ с нулевыми
элементами) и снижение размерности вектора рассеяния
и также при снижении мощности
кроссовых составляющих (составляющей) до уровня внутренних шумов аппаратуры
возможна трансформация входной статистики. следствием
этого является вырождение матрицы когерентности (появление СЧ с нулевыми
элементами) и снижение размерности вектора рассеяния ![]() до 2-х, т.е. m = 2. Снижение
мощности кроссовых составляющих наиболее вероятно в случае воздействия по
основному лепестку диаграммы направленности поляриметрической РСА помехи с
некоррелированными пространственными координатами [5].
до 2-х, т.е. m = 2. Снижение
мощности кроссовых составляющих наиболее вероятно в случае воздействия по
основному лепестку диаграммы направленности поляриметрической РСА помехи с
некоррелированными пространственными координатами [5].
Для анализа характеристик обнаружения при снижении размерности входной статистики преобразуем формулу (10) и её компоненты к виду:

где
;  ,
, ![]() ;
;
 ,
, ![]() ,
, ![]() ,
, ![]() .
.
Вид распределения СЧ ![]() и
и ![]() определяется свойствами произведения MW, в котором оба множителя задаются матрицами
когерентности
определяется свойствами произведения MW, в котором оба множителя задаются матрицами
когерентности ![]() и
и ![]() .
Такого рода связи в [4] предлагается рассматривать на основе свойств так называемой
главной матрицы
.
Такого рода связи в [4] предлагается рассматривать на основе свойств так называемой
главной матрицы ![]() , которая не является эрмитовой,
но при положительно определенных
, которая не является эрмитовой,
но при положительно определенных ![]() и
и ![]() имеет вещественные и положительные СЧ [13].
Матрица G связывает корреляционные матрицы двух
флуктуирующих целей (обнаруживаемой и мешающей) и является математическим
объектом, достаточным для задания вероятностных распределений в рассматриваемой
задаче обнаружения [4].
имеет вещественные и положительные СЧ [13].
Матрица G связывает корреляционные матрицы двух
флуктуирующих целей (обнаруживаемой и мешающей) и является математическим
объектом, достаточным для задания вероятностных распределений в рассматриваемой
задаче обнаружения [4].
3. Разностный алгоритм обнаружения флуктуирующей цели на фоне пассивной помехи
Все многообразие
комбинаций цели и помехи и соответствующие вариации качества обнаружения в конечном
итоге определяются многообразием возможных распределений СЧ чисел главной
матрицы. Перебирая эти распределения можно найти наилучшую комбинацию или
совокупность для которой вероятность будет максимальной и другую совокупность,
для которой данная вероятность будет минимальной. Чтобы обеспечить прочие
равные условия, необходимо, кроме вероятности ложного обнаружения ![]() фиксировать след главной матрицы
фиксировать след главной матрицы ![]() , который, таким образом, становится
определяющим показателем при вычислении вероятности правильного обнаружения
, который, таким образом, становится
определяющим показателем при вычислении вероятности правильного обнаружения ![]() .
.
На рис.1 приведены
граничные функции, определяющие вероятность обнаружения одного ансамбля
флуктуирующих целей на фоне другого. Пространственные характеристики ансамблей
заданы трёхмерной входной статистикой (![]() ) для
) для ![]() . При уменьшении размерности входной
статистики (
. При уменьшении размерности входной
статистики (![]() ) наблюдается более пологий характер
кривых обнаружения, а также незначительное сужение границ между кривыми
) наблюдается более пологий характер
кривых обнаружения, а также незначительное сужение границ между кривыми ![]() и
и ![]() .
Эти кривые соответствуют конкретным наборам СЧ, определяющим максимально
видимые и наиболее скрытые цели на фоне пассивной помехи.
.
Эти кривые соответствуют конкретным наборам СЧ, определяющим максимально
видимые и наиболее скрытые цели на фоне пассивной помехи.
Принимая во внимание возможное (значительное) различие пространственно-временных интервалов корреляции для многолучевых РСА, а, следовательно, и возможность факторизации (5) запишем
 ,
,
где матрица W определяется из (6) путём замены ![]() ,
, ![]() .
.
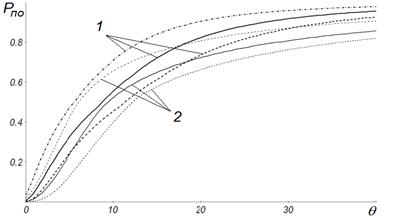
Рис. 1. Граничные функции обнаружения для РСА
при N =
1: 1 – ![]() ,
2 –
,
2 – ![]() ,
, ![]() = 0.01
(штрих пунктирная),
= 0.01
(штрих пунктирная), ![]() = 0.001 (сплошная),
= 0.001 (сплошная), ![]() = 0.0001 (штриховая).
= 0.0001 (штриховая).
При обнаружении флуктуирующей цели задача может осложняться нефакторизуемостью корреляционной матрицы помехи из-за наличия системного шума. Однако системный шум (например, аппаратный шум РСА) в большинстве случаев можно считать слабым, что вполне оправдывается при наличии сильной пассивной помехи.
Когда размеры элемента разрешения соизмеримы или меньше средних размеров обнаруживаемой распределённой цели, происходит практически полное экранирование целью фона. В этом случае весовая матрица (6) преобразуется к виду
Весовая матрица (12), по сути, является основой разностной весовой обработки, позволяющей эффективно использовать оба выигрыша, полученных за счёт поляризационной селекции одного ансамбля целей на фоне другого и наоборот. Квадратичный функционал разностной обработки в виде алгебраических сумм с учётом факторизации (12) принимает вид:

где ![]() ,
, ![]() , а выбор знаков определяет
характер задачи.
, а выбор знаков определяет
характер задачи.
Пусть необходимо обнаружить цель на фоне помехи, тогда из (13) следует, что


а слагаемые, входящие в (14) и записанные с учётом соглашения о суммировании, статистически независимы. Согласно правилу функциональных преобразований [14] плотность вероятности статистики (14) можно записать в общем виде
где ![]() ;
; ![]() – числа, определяющие распределение и
кратность в системах СЧ
– числа, определяющие распределение и
кратность в системах СЧ ![]() (цель на фоне помехи)
и
(цель на фоне помехи)
и ![]() (цель на фоне цели) матриц
(цель на фоне цели) матриц ![]() и
и ![]() ,
соответственно. Если допустить, что системы интегральных параметров
,
соответственно. Если допустить, что системы интегральных параметров ![]() и
и ![]() имеют
одинаковое распределение
имеют
одинаковое распределение ![]()
![]() ),
а также одинаковый порядок кратности
),
а также одинаковый порядок кратности ![]() , форма (15) несколько упрощается:
, форма (15) несколько упрощается:

Плотности вероятности (15) и (16) соответствуют
распределению основной статистики разностного алгоритма при подтверждении
гипотезы ![]() о присутствии флуктуирующей цели.
Плотность вероятности пороговой статистки для данного случая принимает вид
о присутствии флуктуирующей цели.
Плотность вероятности пороговой статистки для данного случая принимает вид

где ![]() (помеха на фоне помехи) и
(помеха на фоне помехи) и ![]() (помеха на фоне цели) являются системами
СЧ матриц
(помеха на фоне цели) являются системами
СЧ матриц ![]() и
и ![]() , соответственно.
, соответственно.
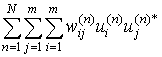
Структурная схема, реализующая алгоритм (13) представлена на рис. 2.
Если (14) переписать в виде
 ,
,
то структурная схема несколько упрощается.
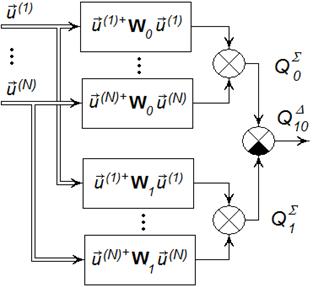
Рис. 2. Структурная схема разностного алгоритма обнаружения флуктуирующей распределённой цели на фоне флуктуирующей помехи
Рис. 3 алгоритм
правила выбора знаков весовых матриц с учётом значений интегральных показателей
обнаружения ![]() ,
, ![]()
При проверке гипотезы ![]() – о присутствии помехи – плотность вероятности
основной статистики обозначим как
– о присутствии помехи – плотность вероятности
основной статистики обозначим как ![]() , пороговой –
, пороговой – ![]() . Обе проверки гипотез (
. Обе проверки гипотез (![]() и
и ![]() ) обладают одинаковой мощностью критерия
при соответствующей расстановке знаков в (13). Правило расстановки знаков в
(13) определяется сравнением следов матриц
) обладают одинаковой мощностью критерия
при соответствующей расстановке знаков в (13). Правило расстановки знаков в
(13) определяется сравнением следов матриц ![]() и
и ![]() , являющихся главными матрицами
соответствующих задач (рис. 3).
, являющихся главными матрицами
соответствующих задач (рис. 3).
Решение задачи определения порога обнаружения (различения) с использованием (10) или (11) не рекомендуется из-за низкой вычислительной точности метода в области малых значений z. Поскольку в (16) и (17) действительных полюсов нет, задача эффективно решается численными методами.
4. Результаты моделирования
Для проверки
эффективности алгоритма разностной обработки использовались два векторных
процесса одинаковой мощности с заданными корреляционными свойствами: ![]() ,
, ![]() [15].
Трансформация входной статистики для выбранных значений коэффициентов взаимной
корреляции не оказывает сильного влияния на интегральные параметры обнаружения.
[15].
Трансформация входной статистики для выбранных значений коэффициентов взаимной
корреляции не оказывает сильного влияния на интегральные параметры обнаружения.
Большее влияние на
параметры обнаружения оказало предположение о независимости компонент
разностных каналов и вызвало смещенность оценки в превышении порога,
эквивалентном двум – трём некогерентным усреднениям. Например, для рассматриваемых
значений ![]() и
и ![]() коэффициент
взаимной корреляции составил 0,4. Увеличение абсолютных значений
коэффициент
взаимной корреляции составил 0,4. Увеличение абсолютных значений ![]() и
и ![]() снижает
коэффициент взаимной корреляции, а, следовательно, уменьшает и смещенность
оценки.
снижает
коэффициент взаимной корреляции, а, следовательно, уменьшает и смещенность
оценки.
Смещенность оценки, полученной согласно (16) и (17), частично объясняется тем, что входной процесс (входная статистика), полученный в результате линейных преобразований, в общем, не является стационарным.
На рис. 4 приведены
зависимости ![]() от числа некогерентных усреднений N. Кривые, полученные при обработке
входной статистики согласно (10) и с использованием разностной обработки (13),
демонстрируют гарантированное увеличение вероятности правильного обнаружения.
На рис. 5 показаны зависимости значения порога от числа некогерентных
усреднений, рассчитанные по аналитическим выражениям (17) и полученные по
результатам имитационного моделирования. Различие представленных кривых не
превышает 1.2 дБ.
от числа некогерентных усреднений N. Кривые, полученные при обработке
входной статистики согласно (10) и с использованием разностной обработки (13),
демонстрируют гарантированное увеличение вероятности правильного обнаружения.
На рис. 5 показаны зависимости значения порога от числа некогерентных
усреднений, рассчитанные по аналитическим выражениям (17) и полученные по
результатам имитационного моделирования. Различие представленных кривых не
превышает 1.2 дБ.
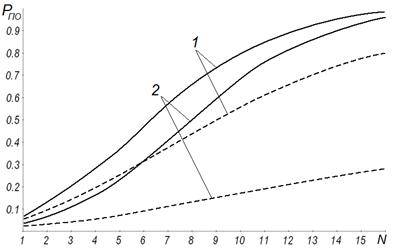
Рис. 4. Зависимости вероятности ![]() от числа некогерентных усреднений N,
1 – обнаружение цели на фоне помехи, 2 – обнаружение помехи на фоне цели, алгоритм
разностной обработки (13) (сплошная), алгоритм обнаружения [4] (штриховая),
от числа некогерентных усреднений N,
1 – обнаружение цели на фоне помехи, 2 – обнаружение помехи на фоне цели, алгоритм
разностной обработки (13) (сплошная), алгоритм обнаружения [4] (штриховая), ![]() = 0.001
= 0.001
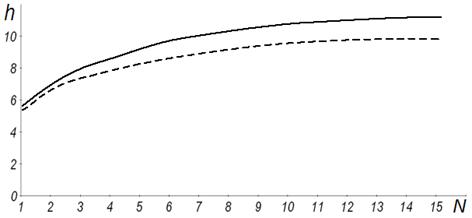
Рис. 5 Зависимость порога обнаружения h
от числа некогерентных усреднений N, рассчитанная аналитически
(сплошная) и по результатам моделирования (штриховая), ![]() =
0.001
=
0.001
5 Заключение
Особенностью обнаружения распределенных флуктуирующих целей на фоне флуктуирующей пассивной помехи является невозможность улучшения качества обнаружения цели только за счёт увеличения мощности передающего устройства РСА. Такое увеличение сказывается одинаково на уровне отражений от обоих видов целей – обнаруживаемой и мешающей. Поэтому, несомненно, актуальны способы улучшения качества обнаружения путём поляризационной обработки в РСА.
При рассмотрении многообразия флуктуирующих целей на фоне другого многообразия флуктуирующих целей, выступающих в роли мешающих, след главной матрицы G является единственным интегральным параметром, определяющим вероятность обнаружения одного ансамбля целей на фоне другого.
Основным недостатком
классического алгоритма обнаружения флуктуирующей цели на фоне флуктуирующей
помехи с использованием поляризационной обработки является невозможность
достоверной оценки матрицы когерентности цели – ![]() или
или ![]() , что ограничивает его применение в
технике РСА.
, что ограничивает его применение в
технике РСА.
Алгоритм разностной обработки с возможностью автоматического (автоматизированного) выявления аномальных наблюдений в области адаптации особенно эффективен, когда размеры элемента разрешения соизмеримы со средними размерами обнаруживаемой флуктуирующей цели, а использование весовых функций (6) становится непродуктивным. Возможно применение алгоритма также при определении границ областей однородности на радиолокационных изображениях. В целом выигрыш за счёт разностной обработки выходного отношения цель/помеха может составить более 4 дБ.
Литература
1. Сосулин Ю. Г. Теория обнаружения и оценивания стохастических сигналов. – M.: Сов. радио, 1978.
2. Хелстром К. Статистическая теория обнаружения сигналов / Пер. с англ. – М.: Изд-во иностранной литературы, 1963.
4. Киселев А. З. Теория радиолокационного обнаружения на основе использования векторов рассеяния целей. – M.: Радио и связь, 2002.
5. Детков А. Н., Ницак Д. А. Границы эффективности обнаружения квазистабильных малоразмерных целей на фоне подстилающей поверхности поляриметрической РСА // Радиотехника. – 2008. – № 6. – С. 5–10.
6. Детков А. Н., Ницак Д. А. Метод математического моделирования поляризационных портретов искусственных распределенных объектов // Радиотехника. – 2007. – № 11. – С. 77–80.
7. Вопросы перспективной радиолокации / Под ред. А. В. Соколова. – М.: Радиотехника, 2003.
8. Современная радиолокация / Пер. с англ. под ред. Ю. Б. Кобзарева. – M.: Сов. радио, 1969.
9. Direct and inverse methods in radar polarimetry / Ed. by W. M. Boerner et al. Part 1, 2. – Dordrecht: Kluver Academic Publishers, 1992.
10. Goodman N. R. Statistical analysis based on a certain multivariate complex gaussian distribution (an introduction) // The Annals of Mathematical Statistics. – 1963. V. 34. – № 1. – P. 152–177.
12. Андерсон Т. Введение в многомерный статистический анализ. – М.: Физматгиз, 1963.
13. Гантмахер Ф. Р. Теория матриц. – М.: Физматгиз, 1966.
14. Куликов Е. И. Прикладной статистический анализ. – М.: Радио и связь, 2003.
15. Бакалов В. П. Цифровое моделирование случайных процессов. – М.: САЙНС-ПРЕСС, 2002.