УДК 621.396.96
КОРАБЕЛЬНАЯ АНТЕННАЯ УСТАНОВКА СИСТЕМЫ СПУТНИКОВОЙ СВЯЗИ:
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ, АЛГОРИТМЫ УПРАВЛЕНИЯ, ВАРИАНТ ПОСТРОЕНИЯ
Н. Ю. Воробьев, Д. Д. Габриэльян, В. И. Демченко, А. А. Косогор, О. З. Султанов
Федеральное государственное унитарное предприятие
«Ростовский-на-Дону научно-исследовательский институт радиосвязи»
Федеральный научно-производственный центр
Статья получена 11 сентября 2015 г.
Аннотация. Рассмотрены вопросы построения корабельной антенной установки (КАУ) для пунктов приема информации системы спутниковой связи (ССС) на основе зеркальной антенны, включающие разработку математической модели и обобщенного алгоритма управления в условиях качки корабля. Устойчивое функционирование каналов ССС обеспечивается выполнением двух требований: сопровождение космических аппаратов (КА) и приема сигналов заданной поляризации. Для реализации этих требований в КАУ предложено использовать трехосное ОПУ с осью «угла наклона зеркала» и адаптацию поляризационного базиса антенны путем поворота антенно-волноводного тракта облучателя. На основе численного моделирования установлена взаимосвязь кинематических параметров приводов ОПУ и антенно-волноводного тракта облучателя с параметрами движения КА и качки корабля. Рассмотрены вопросы практической реализации КАУ.
Ключевые слова: корабельная антенная установка; трехосное опорно-поворотное устройство (ОПУ); поляризационный базис антенны; поворот антенно-волноводного тракта (АВТ) облучателя; ось «угла наклона зеркала»; кинематические параметры осей приводов опорно-поворотного устройства и антенно-волноводного тракта облучателя; алгоритм управления приводами ОПУ и АВТ облучателя зеркальной антенны.
Abstract. The problems of the construction of the ship antenna unit (SAU) for receiving information from the satellite communications system (SCS) on the basis of reflector antenna are discussed. These problems include the development of the mathematical model and the generalized control algorithm in terms of pitching of the ship. Permanent functioning of the SCS channels is ensured by the fulfillment of two requirements: directing of SPACECRAFT (SC) and receiving signals with a given polarization. To implement these requirements in SAU it proposed to use three-axis pedestal with the axis "of the mirror tilt" and adaptation of the polarization basis of the antenna by turning the antenna-waveguide antenna feed. The correlation between the kinematic parameters of the drives SAU and antenna-waveguide antenna feed with parameters of SPACECRAFT motion and rolling of the ship are investigated On the basis of numerical simulation. The practical implementation of SAU are discussed.
Keywords: vehicular antenna installation; three-axis reference-rotary device (SDA); the polarization basis of the antenna; rotating the antenna-waveguide (WAVEGUIDE) of the radiator; the axis "of the mirror tilt"; kinematic parameters of the axes of the actuators of the rotary support and the antenna-waveguide antenna feed; a control algorithm drives SDA and AUT irradiator reflector antenna.
Введение
Необходимость решения двух важных для гражданского морского флота задач – повышение безопасности плавания и снижение стоимости эксплуатации корабля за счет сокращения численности экипажа ‑ определяет необходимость повышения уровня автоматизации управления кораблем, включая контроль состояния агрегатов корабля, перевозимых грузов. Для пассажирских судов еще одно необходимое условие заключается в обеспечении требуемого уровня комфорта пассажиров, составляющей которого является устойчивый доступ в Internet. Решение указанных задач невозможно без организации широкополосных каналов связи между кораблем и центрами управления движением судов с использованием ССС. Еще одним классом абонентов морского базирования ССС являются научно-исследовательские суда, ценность получаемой информации которыми во многом определяется скоростью ее доставки в центры обработки. Указанные направления определяют важность обеспечения устойчивого функционирования каналов спутниковой связи между кораблем и КА.
В современных ССС широко используются Ku- и Ka-диапазоны, в которых требуемый энергетический потенциал может быть обеспечен антенными устройствами с диаметром зеркала 3 – 5 м. Это приводит к уменьшению массы антенн, что позволяет размещать их не только на кораблях с водоизмещением 30000 – 40000 т, но и на кораблях с водоизмещением 4000 – 6000 т [1], для которых влияние качки проявляется в большей степени [2]. В то же время требование снижения стоимости КАУ и ограниченные размеры для ее установки обуславливают необходимость отказа от использования гиростабилизированной платформы (ГСП) при использовании КАУ.
Наиболее сложными вопросами создания рассматриваемых КАУ является обеспечение точности наведения электрической оси антенны в требуемом направлении и адаптивной подстройки поляризационного базиса антенны к поляризационным характеристикам принимаемых сигналов в условиях качки корабля. Это связано, несмотря на известные с заданной точностью в топоцентрической системе координат положение КА и поляризацию принимаемого сигнала, с изменением ориентации КАУ в пространстве в условиях качки корабля. При этом наличие качки приводит не только к изменению ориентации КАУ в пространстве, но и к увеличению относительных угловых скоростей и ускорений движения КА относительно КАУ. Кроме того, необходимо учитывать, что углы качки корабля значительно превышают ширину диаграммы направленности КАУ. Таким образом, совокупность вопросов, связанных с построением КАУ, включает в себя как разработку собственно корабельной антенной установки, так и обобщенного алгоритма наведения антенны и адаптации ее поляризационного базиса, обеспечивающего устойчивый прием сигнала с изменяющимися в условиях качки корабля параметрами (направлением прихода и поляризационными характеристиками).
Цель работы – определение возможного пути построения корабельной антенной установки пункта приема информации ССС и алгоритма управления, обеспечивающих устойчивый прием сигналов КА заданной поляризации в условиях качки корабля.
Решаемые задачи.
1. Разработка математической модели КАУ для определения кинематических параметров при наведении антенны на КА и адаптации поляризационного базиса антенны к параметрам принимаемого сигнала в условиях качки корабля.
2. Разработка обобщенного алгоритма наведения с помощью трехосного ОПУ и адаптивной подстройки поляризационного базиса КАУ.
3. Исследование требуемых значений кинематических параметров приводов КАУ Ku- и Ka-диапазонов в условиях качки корабля.
4. Оценка реализуемости КАУ и алгоритмов управления ими.
Математическая модель КАУ для определения кинематических параметров при наведении антенны на КА и адаптации поляризационного базиса антенны к параметрам принимаемого сигнала в условиях качки корабля
Рассмотрим КАУ, обеспечивающую прием сигнала, направление прихода и поляризация которого в топоцентрической системе координат с началом в центре тяжести корабля являются известными. Данное положение является полностью справедливым для КА ССС [3].
Для определения кинематических характеристик КАУ при
наведении на КА и адаптации поляризационного базиса антенны с учетом параметров
движения КА и качки корабля введем топоцентрическую ![]() , корабельную
, корабельную ![]() и антенную
и антенную ![]() системы координат (ТСК,
КСК и АСК соответственно), взаимное положение которых показано на рис. 1.
В КСК ось
системы координат (ТСК,
КСК и АСК соответственно), взаимное положение которых показано на рис. 1.
В КСК ось ![]() совпадает
с продольной осью корабля и направлена к носу корабля,
ось
совпадает
с продольной осью корабля и направлена к носу корабля,
ось ![]() параллельна
мидель-шпангоуту и направлена вправо, ось
параллельна
мидель-шпангоуту и направлена вправо, ось ![]() перпендикулярна
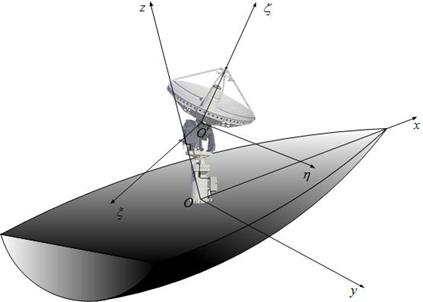
плоскости палубы и направлена вверх. В АСК (рис. 2)
ось
перпендикулярна
плоскости палубы и направлена вверх. В АСК (рис. 2)
ось ![]() совпадает с
электрической осью антенны, ось
совпадает с
электрической осью антенны, ось ![]() перпендикулярна
оси
перпендикулярна
оси ![]() и лежит в плоскости,
образованной осями
и лежит в плоскости,
образованной осями ![]() и
и
![]() , ось
, ось ![]() дополняет АСК до
правой тройки.
дополняет АСК до
правой тройки.
|
а |
|
б |
|
Рис. 1. Взаимное положение систем координат: а – топоцентрической и корабельной систем координат; б – корабельной и антенной систем координат |
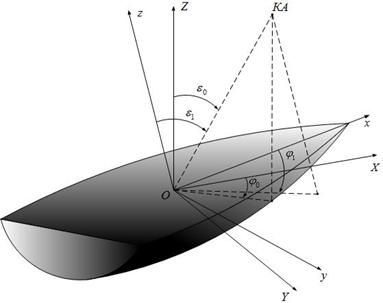
Необходимость использования указанных систем
координат определяется тем, что направление приема сигнала задается углами
места ![]() и азимута
и азимута ![]() в ТСК, а
поляризационный базис антенны, который представим в виде
в ТСК, а
поляризационный базис антенны, который представим в виде
 ,
(1)
,
(1)
‑ в АСК.
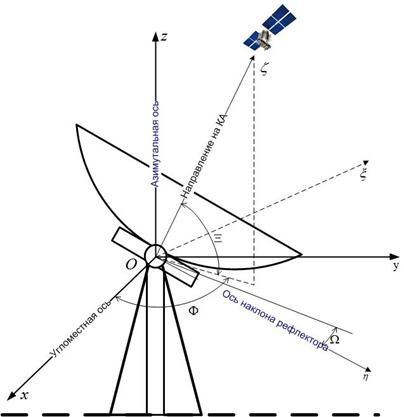
Рис. 2. Взаимное расположение осей ОПУ КАУ
Направление приема сигнала ![]() в ТСК и
в ТСК и ![]() в КСК определяется соответственно
векторами
в КСК определяется соответственно
векторами ![]() и
и
![]() , связь между которыми
имеет вид
, связь между которыми
имеет вид
где матрицы
 ,
(3)
,
(3)
 ,
(4)
,
(4)
 .
(5)
.
(5)
описывают поворот КСК относительно
ТСК из-за килевой ![]() ,
бортовой
,
бортовой ![]() качки
и рыскания корабля по курсу
качки
и рыскания корабля по курсу ![]() соответственно,
вектор
соответственно,
вектор ![]() равен
равен
 .
(6)
.
(6)
Наведение КАУ на
КА осуществляется поворотами азимутальной оси на угол ![]() , угломестной оси на
угол
, угломестной оси на
угол ![]() и оси «угла наклона зеркала»
на углы
и оси «угла наклона зеркала»
на углы ![]() (в исходном положении
при
(в исходном положении
при ![]() ,
, ![]() и
и ![]() АСК совпадает с КСК). После
выполнения поворотов направление на КА в АСК определяется вектором
АСК совпадает с КСК). После
выполнения поворотов направление на КА в АСК определяется вектором ![]() , который находится с
помощью матричного соотношения
, который находится с
помощью матричного соотношения
где
 ,
(9)
,
(9)
 (10)
(10)
матрицы, учитывающие преобразование системы координат, при соответствующем повороте.
Аналогично в каждый момент времени вектор поляризации принимаемого сигнала, определяемый в сферической системе координат, связанной с ТСК, выражением
![]() ,
(11)
,
(11)
в АСК может быть представлен следующим образом
![]() .
(12)
.
(12)
В
выражении (11) ![]() и
и
![]() ‑ орты сферической системы
координат, связанной с ТСК,
‑ орты сферической системы
координат, связанной с ТСК, ![]() ‑ знак операции
векторного умножения векторов;
‑ знак операции
векторного умножения векторов; ![]() и
и ![]() ‑ комплексные значения составляющих
напряженности электрического поля принимаемого сигнала в текущий момент
времени.
‑ комплексные значения составляющих
напряженности электрического поля принимаемого сигнала в текущий момент
времени.
Приведенные соотношения представляют математическую модель для определения кинематических параметров КАУ при наведении антенны и адаптации поляризационного базиса в условиях качки корабля.
Обобщенный алгоритм наведения с помощью трехосного ОПУ и адаптивной подстройки поляризационного базиса КАУ. Обобщенный алгоритм управления КАУ должен обеспечивать выполнение двух условий: точное совмещение электрической оси антенны с направлением на КА и максимальную поляризационную эффективность КАУ, определяемую, как предложено в [4].
Первое условие математически определяется в виде
![]() .
(13)
.
(13)
Решение получаемого с учетом (2)-(6) и (8)-(13) матричного уравнения (7) позволяет представить в явном виде выражения для углов поворота всех трех приводов
 ,
(14)
,
(14)
 ,
(15)
,
(15)
 , (16)
, (16)
где
![]() ‑ угловая скорость азимутальной
оси, выбор которой производится, как будет показано ниже, с учетом различных
условий.
‑ угловая скорость азимутальной
оси, выбор которой производится, как будет показано ниже, с учетом различных
условий.
Соотношения (14)-(16) определяют следующий алгоритм наведения КАУ с учетом качки корабля:
‑ по исходным данным о положении КА в ТСК в каждый момент времени с учетом данных навигационной системы корабля формируются данные о положении КА в КСК (углы места и азимута);
‑ выбирается закон изменения угла поворота
азимутальной оси ![]() ;
;
‑ в соответствии с законом изменения угла азимута КА в КСК и поворота азимутальной оси на основе выражения (15) определяется угол поворота угломестной оси КАУ;
‑ на основе данных об угловом положении КА в КСК и данных датчиков углов поворота азимутальной и угломестной осей с использованием формулы (16) определяется угол поворота оси «угла наклона зеркала».
При выборе закона изменения угловой скорости азимутальной
оси ![]() могут использоваться различные
условия, к которым в первую очередь, можно отнести снижение требований к
приводам азимутальной оси, связанные с уменьшением предельно возможных значений
угловой скорости и углового ускорения поворота данной оси, уменьшение угла и/или
угловой скорости поворота оси «угла наклона зеркала» и т.д., а также с
ограничениями на предельно возможную угловую скорость привода азимутальной оси
могут использоваться различные
условия, к которым в первую очередь, можно отнести снижение требований к
приводам азимутальной оси, связанные с уменьшением предельно возможных значений
угловой скорости и углового ускорения поворота данной оси, уменьшение угла и/или
угловой скорости поворота оси «угла наклона зеркала» и т.д., а также с
ограничениями на предельно возможную угловую скорость привода азимутальной оси
 , (17)
, (17)
где ![]() ‑ предельно возможная
угловая скорость, обеспечиваемая азимутальным приводом.
‑ предельно возможная
угловая скорость, обеспечиваемая азимутальным приводом.
Адаптация поляризационного базиса КАУ связана с его
поворотом на угол ![]() , при котором
ориентация поляризационного эллипса принимаемого сигнала и поляризационного
базиса антенны совпадают (при этом предполагается, что при приеме сигнала
известной поляризации в ССС коэффициенты эллиптичности принимаемого сигнала и поляризационного
базиса антенны равны). Данный угол равен, например, углу между ортом
, при котором
ориентация поляризационного эллипса принимаемого сигнала и поляризационного
базиса антенны совпадают (при этом предполагается, что при приеме сигнала
известной поляризации в ССС коэффициенты эллиптичности принимаемого сигнала и поляризационного
базиса антенны равны). Данный угол равен, например, углу между ортом ![]() АСК и ортом
АСК и ортом ![]() сферической системы координат,
связанной с ТСК, при условии наведения антенны на КА. Использование матричных
преобразований, аналогичных (2), (7) позволяет получить аналитическое
представление для данного угла в виде
сферической системы координат,
связанной с ТСК, при условии наведения антенны на КА. Использование матричных
преобразований, аналогичных (2), (7) позволяет получить аналитическое
представление для данного угла в виде
![]() , (18)
, (18)
где ![]() ‑ знак операции скалярного
умножения векторов.
‑ знак операции скалярного
умножения векторов.
При записи соотношения (18) предполагается, что в отсутствии качки поляризационный базис КАУ и принимаемого сигнала совпадают.
Алгоритм адаптации поляризационного базиса КАУ с учетом полученных соотношений имеет следующий вид:
‑ по исходным данным о положении КА и поляризации излучаемого сигнала в ТСК в каждый момент времени с учетом данных навигационной системы корабля формируются данные об ориентации вектора поляризации принимаемого сигнала в КСК относительно осей КАУ;
‑ на основе полученных данных с использованием выражения (18) определяется угол поворота поляризационного базиса КАУ.
Полученные результаты показывают, что как для наведения антенны, так и для адаптации поляризационного базиса антенны достаточно иметь только данные об углах качки корабля и курса в каждый момент времени, что позволяет упростить управление КАУ. Обобщенная структурная схема устройства управления КАУ приведена на рис. 3.
Использование аналитической формы зависимостей, связывающих положение КА, углы качки и курса корабля с необходимыми углами поворота зеркала и поляризационного базиса КАУ значительно упрощает реализацию алгоритма управления.
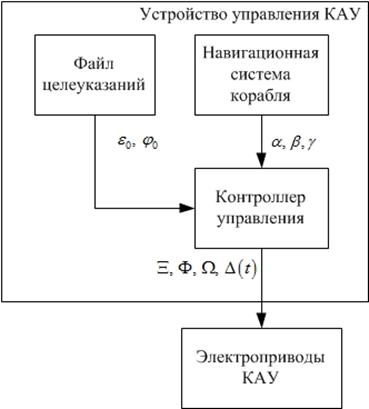
Рис. 3 Обобщенная структурная схема устройства управления КАУ
Исследование требуемых значений кинематических параметров приводов КАУ Ku- и Ka-диапазонов в условиях качки корабля
На основе разработанной модели и обобщенного
алгоритма наведения и адаптации поляризационного базиса антенны созданы программы
для численного исследования значений кинематических параметров КАУ, при которых
обеспечивается устойчивый прием сигналов КА в Ku-
и Ka-диапазонах в
условиях качки корабля [5, 6]. Результаты исследований для наиболее сложного
случая сопровождения КА, находящегося на круговой орбите при угле места в точке
кульминации, равном ![]() (призенитная
область), приведены на рис. 4-6. Максимальная амплитуда и период килевой
качки составляли
(призенитная
область), приведены на рис. 4-6. Максимальная амплитуда и период килевой
качки составляли ![]() и
и ![]() , бортовой качки –
, бортовой качки – ![]() и
и ![]() ,
что соответствует интенсивности волнения 3 балла для судов водоизмещением 5000-6000 т
[7-9].
,
что соответствует интенсивности волнения 3 балла для судов водоизмещением 5000-6000 т
[7-9].
|
а) |
|
б) |
|
в) |
|
Рис. 4. Кинематические
характеристики азимутальной и угломестной осей при предельном значении
угловой скорости азимутальной оси |
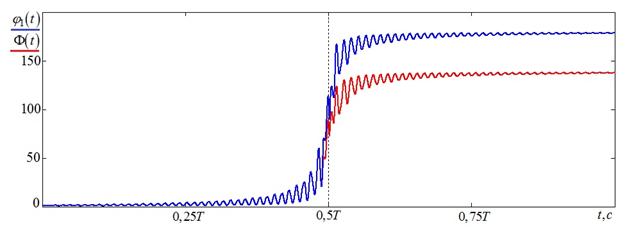
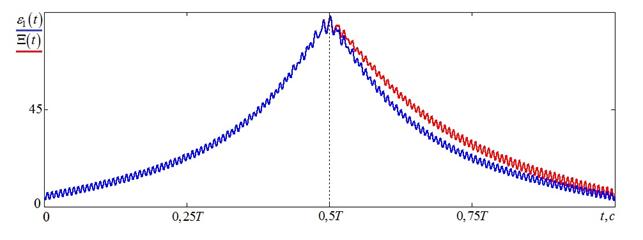
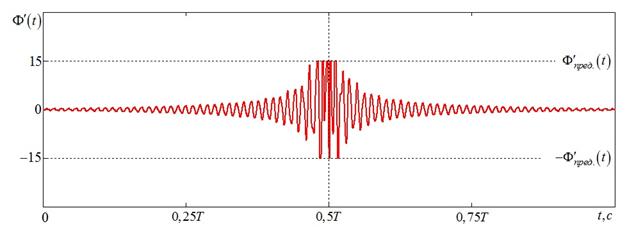
Синей линией на рис. 4, а
и рис. 4, б показаны углы азимута и места КА в КСК, красной
линией – углы поворота азимутальной и угломестной осей. На рис. 4, в
приведена угловая скорость азимутальной оси с учетом ограничения предельно
возможной угловой скорости привода при наведении КАУ. Анализ
кинематических параметров выполнен на временном интервале ![]() , что позволяет проанализировать в
полной мере совокупное влияние килевой и бортовой качек. Точка кульминации
положения КА в ТСК соответствует середине рассматриваемого интервала.
, что позволяет проанализировать в
полной мере совокупное влияние килевой и бортовой качек. Точка кульминации
положения КА в ТСК соответствует середине рассматриваемого интервала.
|
а) |
|
б) |
|
Рис. 5. Кинематические
характеристики оси «угла наклона зеркала» при предельном значении угловой
скорости азимутальной оси |
Приведенные графики иллюстрируют
работу каждой из осей в соответствии с описанным выше алгоритмом управления. В
частности, для рассматриваемого варианта алгоритма наведения КАУ после
превышения угловой скорости движения КА относительно корабля возникает отставание
угла поворота азимутальной оси от азимутального положения КА по отношению к
кораблю (рис. 4, а).
Точное наведение антенны при этом обеспечивается поворотом оси «угла наклона
зеркала» (рис. 5, а) и
коррекцией угла поворота угломестной оси ![]() (рис. 4, б).
(рис. 4, б).
Следует отметить, что рассматриваемое трехосное ОПУ принципиально позволяет реализовать алгоритмы функционирования двухосных ОПУ «X-Y» или «X-Z» в зависимости от угла места при наведении КАУ [10]. Однако использование этих более простых алгоритмов в условиях качки корабля приводит к необходимости попеременного их применения. Такой переход с одного алгоритма управления на другой приводит к резкому разгону и торможению азимутальной оси и оси «угла наклона зеркала». При наличии ограничений на предельно возможные угловые скорости и ускорения приводов КАУ это может приводить к потере связи с КА и более быстрому выходу из строя приводов азимутальной оси и оси «угла наклона зеркала». В свою очередь, рассматриваемый алгоритм наведения КАУ принципиально обеспечивает более низкие требования к приводам при наведении КАУ.
Так,
например, вместо требуемой угловой скорости азимутальной оси в режиме «X-Z»,
превышающей ![]() , при
рассматриваемом ограничении угловой скорости привода азимутальной оси
максимальная угловая скорость оси «угла наклона зеркала» составит
, при
рассматриваемом ограничении угловой скорости привода азимутальной оси
максимальная угловая скорость оси «угла наклона зеркала» составит ![]() (рис. 5,б), что значительно
меньше требуемой угловой скорости вращения азимутальной оси. При этом максимальное
значение угла поворота оси «угла наклона зеркала» составит
(рис. 5,б), что значительно
меньше требуемой угловой скорости вращения азимутальной оси. При этом максимальное
значение угла поворота оси «угла наклона зеркала» составит ![]() , что меньше углового отставания
азимутальной оси от азимутального направления на КА. Уменьшение предельного
значения угловой скорости азимутальной оси, как следует из результатов
проведенного моделирования, обуславливает увеличение поворота оси «угла наклона
зеркала» и соответственно увеличение его угловой скорости и углового ускорения.
Однако и в этом случае угол поворота оси «угла наклона зеркала» меньше углового
отставания азимутальной оси от азимутального направления на КА. Таким образом,
введение оси «угла наклона зеркала» при использовании рассматриваемого варианта
обобщенного алгоритма наведения КАУ позволяет значительно снизить требования к
предельным значениям угловых скоростей и ускорений азимутального привода.
Требования к кинематическим параметрам угломестного привода не претерпевают
принципиальных изменений. В то же время существует ограничение на уменьшение
предельной угловой скорости азимутальной оси. Это связано с тем, что при
отставании азимутальной оси от азимутального направления на КА на 90° и более
не существует физически возможных поворотов оси «угла наклона зеркала», при
которых электрическая ось антенны будет направлена на КА.
, что меньше углового отставания
азимутальной оси от азимутального направления на КА. Уменьшение предельного
значения угловой скорости азимутальной оси, как следует из результатов
проведенного моделирования, обуславливает увеличение поворота оси «угла наклона
зеркала» и соответственно увеличение его угловой скорости и углового ускорения.
Однако и в этом случае угол поворота оси «угла наклона зеркала» меньше углового
отставания азимутальной оси от азимутального направления на КА. Таким образом,
введение оси «угла наклона зеркала» при использовании рассматриваемого варианта
обобщенного алгоритма наведения КАУ позволяет значительно снизить требования к
предельным значениям угловых скоростей и ускорений азимутального привода.
Требования к кинематическим параметрам угломестного привода не претерпевают
принципиальных изменений. В то же время существует ограничение на уменьшение
предельной угловой скорости азимутальной оси. Это связано с тем, что при
отставании азимутальной оси от азимутального направления на КА на 90° и более
не существует физически возможных поворотов оси «угла наклона зеркала», при
которых электрическая ось антенны будет направлена на КА.
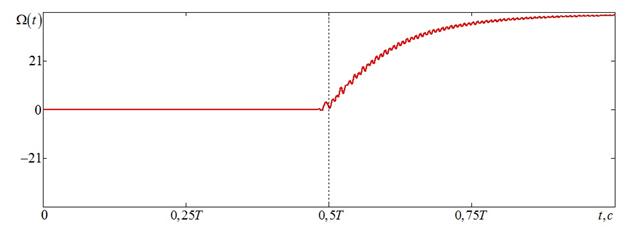
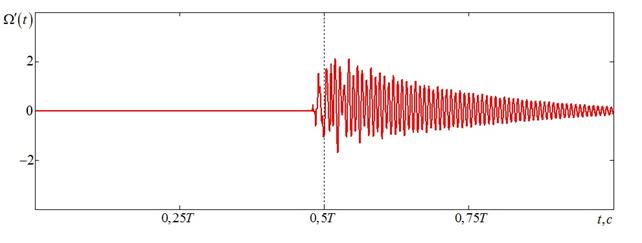
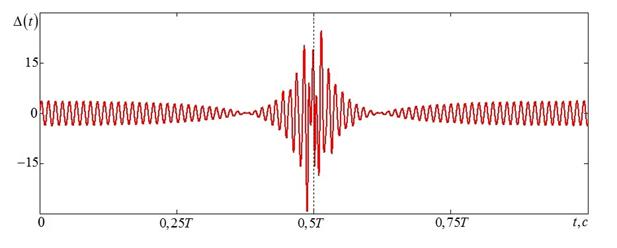
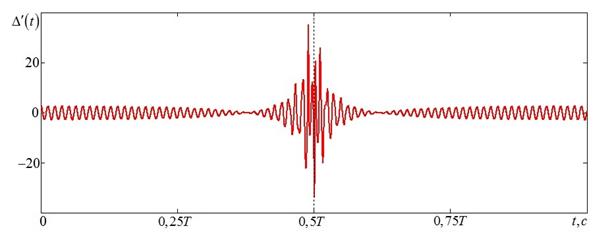
На рис. 6 приведены кинематические характеристики при адаптации поляризационного базиса антенны в условиях качки корабля. Приведённые результаты показывают, что с увеличением угла места КА при неизменных параметрах качки необходимые для сохранения уровня поляризационной эффективности приема сигналов угол, угловая скорость и угловое ускорение поворота поляризационного базиса возрастают. Этот эффект является по своей сути аналогичным эффекту возрастания необходимой азимутальной угловой скорости сопровождения КА при больших углах места в азимутально-угломестном ОПУ [10]. При этом ось вращения поляризационного базиса представляет собой первичную ось, относительно которой происходит вращение. Следствием этого эффекта является ограничение по углу места КА, для которых возможен устойчивый прием сигналов линейной поляризации.
а) |
|
б) |
|
Рис. 6. Кинематические характеристики поворота антенно-волноводного тракта облучателя при сопровождении КА: а)
угол поворота |
Вариант реализации КАУ
Одним из вариантов построения КАУ без использования ГСП является зеркальная антенна с трехосным ОПУ, включающим ось «угла наклона зеркала» [11]. Антенна с таким ОПУ принципиально обеспечивает реализацию различных алгоритмов сопровождении КА на геостационарных, высокоэллиптических и круговых орбитах при больших и малых углах места [12], а также предложенного обобщенного алгоритма наведения и адаптивной подстройки поляризационного базиса антенны.
Реализация оси «угла наклона зеркала» осуществляется относительно простым способом – добавлением в конструкцию стандартного двухосного ОПУ кронштейнов подвеса угла наклона, тягового кронштейна, электросилового привода домкратного типа с использованием шариковинтовой прецизионной пары, устройства управления электродвигателем и датчика углового положения (рис. 7).

Рис. 7. Корабельная антенная установка с трехосным ОПУ
Обеспечение адаптивной подстройки поляризационного базиса КАУ в условиях качки корабля в известных технических решениях достигается поворотом угломестной оси в плоскости, перпендикулярной электрической оси антенны [2, 10]. Однако такое решение не может быть использовано в рассматриваемой КАУ, так как приводит к значительному повышению стоимости и массогабаритных характеристик ОПУ и КАУ в целом. В этом случае для обеспечения высокой поляризационной эффективности КАУ в условиях качки корабля используется поворот антенно-волноводного тракта облучателя в целом.
Выбранный вариант построения КАУ и используемые алгоритмы управления ОПУ и поляризационным базисом КАУ позволяют, как показывают результаты исследований, обеспечивать наведения электрической оси антенны в требуемом направлении и сохранение соответствия поляризационных характеристик антенны и принимаемых сигналов в условиях качки корабля для спутников при любых углах места, в том числе и в призенитной области. При увеличении угла места КА, амплитуды и частоты качки требуется только увеличение мощности приводов, а алгоритмы управления остаются неизменными.
Выводы
1. Разработанная математическая модель, описывающая на основе применения матричного аппарата изменение направления электрической оси антенны и поляризационного базиса при повороте осей ОПУ и антенно-волноводного тракта с облучателем, позволяет определить кинематические параметры при наведении антенны на КА и адаптации поляризационного базиса антенны к параметрам принимаемого сигнала в условиях качки корабля. Полученная модель включает обобщенные аналитические соотношения, устанавливающие взаимосвязь между углами и угловыми скоростями поворота осей ОПУ и антенно-волноводного тракта с параметрами движения КА и качки корабля.
2. Полученные в статье аналитические соотношения между параметрами движения КА в топоцентрической системе координат, качки корабля и требуемых значениями кинематических параметров ОПУ и колонны облучателя позволили разработать обобщенный алгоритм управления ОПУ и колонной облучателя, обеспечивающий наведение электрической оси антенны в требуемом направлении и сохранение соответствия поляризационных характеристик антенны и принимаемого сигнала в условиях качки корабля.
3.
Результаты численного моделирования показали, что в условиях качки корабля
введение «оси угла наклона зеркала» позволяет снизить требования к
кинематическим параметрам приводов КАУ. Так, например, в условиях качки с
амплитудой и периодом килевой качки ![]() и
и
![]() , бортовой качки –
, бортовой качки – ![]() и
и ![]() ,
соответствующей интенсивности волнения 3 балла для судов водоизмещением
5000-6000 т, при ограничении угловой скорости привода азимутальной оси
,
соответствующей интенсивности волнения 3 балла для судов водоизмещением
5000-6000 т, при ограничении угловой скорости привода азимутальной оси ![]() максимальная угловая скорость оси
«угла наклона зеркала» составит
максимальная угловая скорость оси
«угла наклона зеркала» составит ![]() .
При традиционном построении ОПУ с подвеской типа «X-Z»
требуемая
угловая скорость азимутальной оси в этих же условиях превышала
бы
.
При традиционном построении ОПУ с подвеской типа «X-Z»
требуемая
угловая скорость азимутальной оси в этих же условиях превышала
бы ![]() . Максимальное значение угла
поворота оси «угла наклона зеркала» составит в этом случае
. Максимальное значение угла
поворота оси «угла наклона зеркала» составит в этом случае ![]() , что меньше углового отставания
азимутальной оси от азимутального направления на КА. Таким образом, введение
оси «угла наклона зеркала» позволяет снизить требования к приводам азимутальной
оси ОПУ.
, что меньше углового отставания
азимутальной оси от азимутального направления на КА. Таким образом, введение
оси «угла наклона зеркала» позволяет снизить требования к приводам азимутальной
оси ОПУ.
4. Выполненные исследования показали, что КАУ пункта
приема информации ССС может быть реализована на основе зеркальной
антенны с поворотом антенно-волноводного тракта с облучателем, установленной на
трехосном ОПУ с осью «угла наклона зеркала». Данный вариант построения КАУ позволяет
принципиально реализовывать различные алгоритмы управления при сопровождении КА
на геостационарных, высокоэллиптических и круговых орбитах. При этом использование
серийно выпускаемых приводов, обеспечивающих угловую скорость поворота
азимутальной оси до ![]() ,
позволяет при установке КАУ на судах водоизмещением 4000 – 6000 т
устойчиво сопровождать КА на геостационарных, высокоэллиптических и круговых
орбитах, включая и призенитную область, в условиях качки корабля при
трехбалльном волнении.
,
позволяет при установке КАУ на судах водоизмещением 4000 – 6000 т
устойчиво сопровождать КА на геостационарных, высокоэллиптических и круговых
орбитах, включая и призенитную область, в условиях качки корабля при
трехбалльном волнении.
Литература
1. Безбородов В. Г., Жаков А. М. Суда космической службы. Л.: Судостроение. 1980.
2. Тупысев А. Н. Радиолокационное наблюдение в условиях качки. ‑ Л.: Военно-морская ордена Ленина академия. 1965.
3. Эскобал П. Методы определения орбит. М.: Мир. 1970.
4. Constantine A. Balanis. Antenna Theory: Analysis and Design. 3-d edition. Willey-Interscience. April 4, 2005.
5. Воробьев Н. Ю., Габриэльян Д. Д., Коваленко Е. А., Султанов О. З. Программа исследования влияния качки корабля на требуемые угловые скорости и ускорения корабельной антенной установки при сопровождении космического аппарата // Свид. о гос. регистр. программы для ЭВМ № 2013619364, 02.10.2013.
6. Воробьев Н. Ю., Габриэльян Д. Д., Демченко В.И., Коваленко Е. А., Косогор А.А., Султанов О. З. Программа управления корабельной трехосной антенной установкой без гиростабилизированной платформы в условиях качки корабля // Свид. о гос. регистр. программы для ЭВМ № 2011662406 от 28.11.2014 г.
7. Семенов-Тян-Шанский В.В., Благовещенский С.Н., Холодилин А.Н. Качка корабля. Л., «Судостроение». 1969. 392 с.
8. БлаговещенскийС. Н., Холодилин А.Н. Справочник по статике и динамике корабля. В двух томах. Изд. 2-е, перераб. и доп. Том 2. Динамика (качка) корабля. Л., «Судостроение». 1976. 176 с.
9. Ремез Ю.В. Качка корабля. Л.: «Судостроение», 1983. – 328 с.
10. Покрас А. М., Цирлин В. М., Кудеяров Г. Н. Системы наведения антенн земных станций спутниковой связи. М.: Связь. 1978.
11. Пат. 2524838 Российская Федерация, МПК H01Q3/08. Трехосное опорно-поворотное устройство / Воробьев Н.Ю., Демченко В.И., Коваленко Е.А. и др.; заявитель и патентообладатель Федеральное государственное унитарное предприятие «Ростовский-на-Дону научно-исследовательский институт радиосвязи» (ФГУП "РНИИРС") – № 2012136673/08; заявл. 27.08.2012 г, опубл. 10.08.2014, Бюл. № 22, 8 с.
12. Воробьев Н.Ю., Габриэльян Д.Д., Демченко В.И., Коваленко Е.А., Косогор А.А., Раздоркин Д.Я., Саранов А.А., Султанов О.З. Выбор путей построения корабельной антенной установки сантиметрового и миллиметрового диапазонов // Радиотехника. 2014. №.8. С. 71 - 78.