|
“ЖУРНАЛ РАДИОЭЛЕКТРОНИКИ” N 9, 2009 |
Анализ селективных признаков наземных радиолокационных целей
А. Б. Борзов, К. П. Лихоеденко, И. В. Муратов, Г. Л. Павлов, В. Б. СучковМГТУ им. Н.Э.Баумана
Получена 4 августа 2009 г.
В статье приведены результаты исследования спектральных и поляризационных характеристик сигналов, отраженных от типовых наземных движущихся целей на фоне подстилающих поверхностей в миллиметровом диапазоне радиоволн. Показана возможность выделения информативных признаков, основанных на спектрально-поляризационных отличиях. Проведена оценка разделимости классов целей в соответствующем признаковом пространстве.
Ключевые слова: радиолокационные системы, миллиметровые волны, поляризационная матрица рассеяния, уголковый отражатель, ЭПР.
1. Введение
К современным радиолокационным системам (РЛС), предназначенным для селекции движущихся целей на фоне подстилающих поверхностей, предъявляются следующие основные требования: всепогодность, всесуточность, автономность принятия решений, высокая разрешающая способность, высокая помехозащищенность. Перспективные комплексы должны обеспечивать надежное обнаружение и распознавание различных типов целей в сложных помеховых условиях.
Цель исследований – повышение селективных возможностей информационных каналов существующих и перспективных радиолокационных комплексов на основе использования характерных особенностей спектрально-поляризационной структуры сигналов, отраженных от объектов и фонов различных типов.
Рациональное построение современных и перспективных радиолокационных систем приводит к необходимости проведения комплекса исследований поискового характера по выявлению и выделению новых информативных признаков различных объектов в миллиметровом диапазоне длин волн (ММДВ). В связи с этим, были поставлены и решены следующие основные задачи:
- разработка радиолокационного стенда для исследования селективных свойств движущихся целей в ММДВ на основе анализа их полной поляризационной матрицы рассеяния (ППМР);
- проведение экспериментальных исследований и анализ их результатов на основе различных алгоритмов обработки с целью выявления информативных признаков объектов радиолокации.
2. Устройство стенда и условия проведения экспериментов
В настоящее время известны результаты многочисленных исследований информативных признаков радиолокационных целей. Особенностью исследований, проведенных в данной работе, является то, что они инвариантны к типу РЛС ММДВ и позволяют сформировать все элементы ППМР целей на промежуточной частоте в векторной форме. При этом обеспечивается синхронная запись видеоизображения.
Такой подход обуславливает функциональное построение радиолокационного комплекса (РЛК). Функциональная схема стенда для проведения экспериментальных исследований показана на рис. 1.
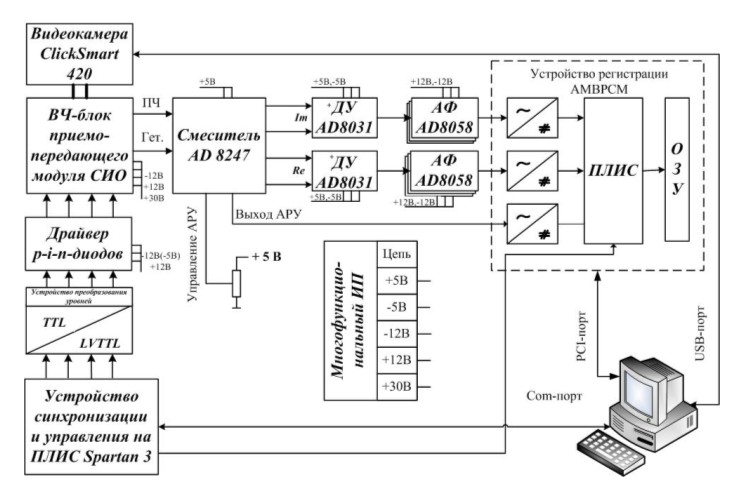
Рис. 1. Функционнальная схема стенда
В состав РЛК входят следующие основные блоки.
Приемо-передающий модуль (ППМ) обеспечивает функционирование в непрерывном и импульсном режимах.
Передающая часть ППМ формирует зондирующие импульсы с изменяемыми длительностью и периодом повторения.
Приемная часть ППМ построена по схеме с двойным преобразованием частоты, причем второй смеситель является активным квадратурным, что позволяет регистрировать с точностью до фазы сигналы на промежуточной частоте с верхней частотой полосы пропускания до 25 МГц. Активные фильтры формируют необходимые частотные полосы пропускания при работе в различных режимах.
Антенный блок ППМ, имеющий в своем составе четыре рупорно-линзовых антенны, обеспечивает излучение и прием электромагнитных сигналов на согласованных и перекрестных поляризациях и разрешающую способность по угловым координатам до 50. Поляризационный коэффициент эллиптичности – 21 дБ.
Для возможности получения составляющих ППМР отраженных сигналов в антенном блоке осуществляется коммутация каналов pin-диодными ключами. Имеется возможность программного управления ключами и, соответственно, видом временных диаграмм (рис. 2) для разных условий эксперимента. В соответствии с временными диаграммами принятые сигналы на всех поляризациях усиливаются и регистрируются в одном сквозном канале. Благодаря этому во всех каналах удается получить одинаковые уровни шумов гетеродина и равные характеристики усиления сигналов. На рис. 2 цифрами 1, 2, 3, 4 обозначены рабочие точки, в которые подается напряжение для управления передачей и приемом сигналов горизонтальной (ГП) и вертикальной (ВП) поляризаций.
Многовариантное управление ключами обеспечивается за счет использования программируемой логической интегральной схемой (ПЛИС) с тактовой частотой 50 МГц. Это позволяет выполнить жесткие требования по стабильности и величине временных параметров. Узел на ПЛИС – устройство синхронизации и управления – позволяет обеспечить работу стенда в импульсном и непрерывном режимах функционирования.
Использование коротких зондирующих импульсов для достижения высокой разрешающей способности по дальности (не более 3 м) привело к необходимости использования высокоскоростных АЦП и накоплению больших массивов экспериментальных данных.
Выполнение этих требований обеспечивается блоком сбора информации на основе базового модуля AMBPCM с 14-разрядным субмодулем ADM414x60M и 1 ГБ оперативной памяти. Такой объем памяти дает возможность записывать реализации импульсных и непрерывных сигналов длительностью до 5 с для составляющих ППМР в двух квадратурах.
Для правильной интерпретации условий эксперимента и повышения информативности результатов в составе стенда используется видеоконтрольное устройство, позволяющее синхронно с радиоканалом записывать визуальную информацию о ходе эксперимента. Оптическая ось видеоконтрольного устройства юстируется с осью диаграммы направленности антенной системы. Функционирование видеоконтрольного устройства ВКУ синхронизировано по времени с работой АЦП.
Синхронизация работы всех устройств, входящих в состав стенда, обеспечивается управляющей ЭВМ. Практически все используемые в стенде устройства имеют стандартные интерфейсы и не требуют дополнительных модулей согласования.
Разработанное специальное программное обеспечение (ПО) для программирования ПЛИС обеспечивает формирование временных диаграмм управления приемо-передатчиком.
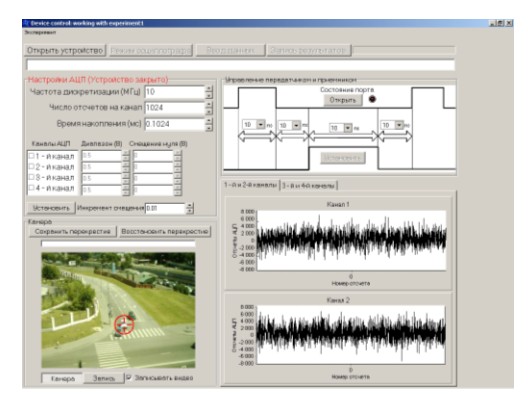
Сервисное ПО имеет удобный и понятный в работе интерфейс (рис. 3), позволяющий оперативно управлять ходом эксперимента и обеспечивать надежность работы стенда. Сервисное ПО позволяет производить:
- юстировку радиолокационного канала и канала видеоизображения;
- выбор параметров сигналов и режимов работы АЦП;
- выбор параметров записи информации в ОЗУ устройства регистрации и ее последующей распаковки и хранении в памяти ЭВМ;
- выбор параметров записи и хранения видеоинформации.
Рис. 3. Интерфейс сервисного ПО
Экспериментальные исследования были проведены в средней полосе России на горизонтальных и наклонных трассах в различных естественных метеоусловиях (сухая и влажная погода, дождь, снег).
Типовые цели: гусеничная и колесная техника (в т.ч. автотранспорт), человек.
Природные объекты: травяной покров, песчаный покров различного рельефа, кустарник, отдельные лиственные и хвойные деревья, смешанный лес.
Искусственные образования: бетонная площадка, каменное здание, дорога.
3. Калибровка и юстировка стенда для проведения экспериментов
Настройка экспериментальной установки РЛС была проведена в лабораторных условиях. Временная синхронизация работы приемного и передающего каналов выполнялась на ЭВМ с использованием паспортных данных на узлы трактов и разработанного сервисного ПО. Развязка каналов трактов составляет величину не хуже – 20 дБ. Погрешность временной привязки радиолокационных трактов составляет 10 нс. Погрешность временной синхронизации видео- и радиоканалов составляет 17 мс.
Юстировка видео- и радио-каналов проводилась по лазерному лучу. На дальности 50 м погрешность не превышает 5 см.
Балансировка квадратурных каналов с входной полосой 2,5 ГГц осуществлялась по фазе и амплитуде в каждом радиолокационном канале. Линейность динамического диапазона блока преобразования сигнала составляет 69 дБ, разбаланс фаз – менее 1 градуса, дисбаланс амплитуд – не более 0,3 дБ.
В качестве эталонных радиолокационных объектов использовались трехгранный и двугранный уголковые отражатели (УО). Для контроля функционирования приемо-передающих трактов при локации движущихся целей использовалась вращающаяся система из трех трехгранных УО.
Абсолютные значения ЭПР УО в главных плоскостях на согласованных поляризациях равны между собой и оцениваются величинами: 370 м2 – для трехгранного, 620 м2 – для двугранного УО. Фазы отраженных сигналов для трехгранного УО в главных плоскостях на вертикальной и горизонтальной поляризациях совпадают, а для двугранного – сдвинуты на
друг относительно друга.
Вращающаяся система из трех трехгранных УО формирует отраженный сигнал, расчет которого осуществляется методом математического моделирования. Поверхность системы отражателей аппроксимируется полигональной моделью [1]. Составляющие ППМР каждого элемента модели вычисляются на основе методов физической оптики и физической теории дифракции, которые на большинстве ракурсов наблюдения цели составляют основной вклад в компоненту отраженного сигнала при согласованной поляризации. Составляющая отраженного от уголков сигнала на перекрестной поляризации образуется в основном за счет многократных переотражений электромагнитных волн между отдельными элементами цели.
При проведении расчетов характер поляризации задавался углом расположения вектора поляризации передатчика и приемника относительно плоскости опоры – соответственно
и
. Расчеты проводились для следующих трех случаев: вертикальная согласованная поляризация (
), горизонтальная согласованная поляризация (
) и перекрестная поляризация (
).
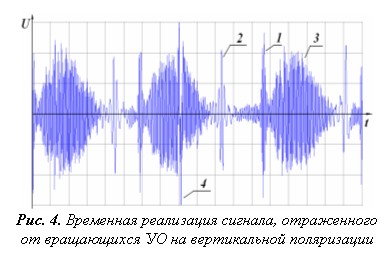
На рис. 4 приведена временная реализация одной из квадратур входного сигнала, отраженного от системы вращающихся УО. Интервал времени соответствует полному обороту. Участок 1 соответствует отражению от нижней грани уголка, 2 – двукратные переотражения от боковых граней, 3 – трехкратные переотражения от всех трех граней, выбросы 4 – когерентное сложение напряжений от задней части нижней грани УО и от трехгранной структуры.
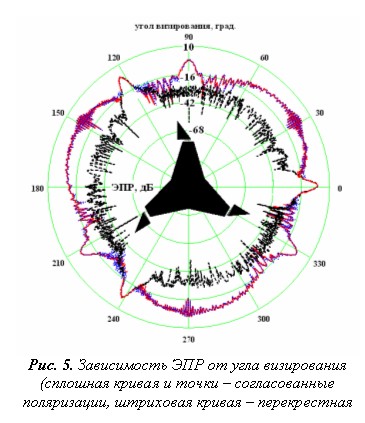
На рис. 5 приведены диаграммы ЭПР системы уголков на вертикальной, горизонтальной и перекрестной поляризациях. ЭПР уголков на согласованных поляризациях практически совпадают между собой. Кросс-поляризационная составляющая ЭПР уголков имеет существенный вклад лишь на тех ракурсах, где наблюдаются только двукратные переотражения, т.е. в случаях, когда трехгранный уголок отражает как двугранный. На этих ракурсах наблюдения ЭПР уголка на согласованной поляризации практически совпадает с перекрестной поляризацией и соответствует теоретическому значению
, где S – площадь грани УО,
- длина волны. В области трехкратных переотражений кросс-поляризационная составляющая ЭПР практически отсутствует, а расчетная ЭПР УО соответствует известному теоретическому значению
.
4. Обработка сигналов и анализ полученных результатов
В процессе проведения исследований для выявления информативных признаков реальных целей были получены зависимости изменения частотных характеристик отраженных сигналов от времени (спектрограммы). Выборки спектров производились после низкочастотной фильтрации импульсных последовательностей по 1024 отсчетам времени. Расчетным путем получены спектрограммы для всех типов целей.
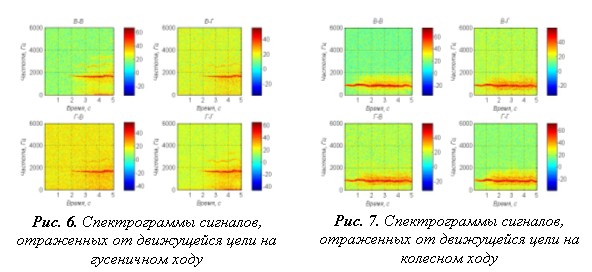
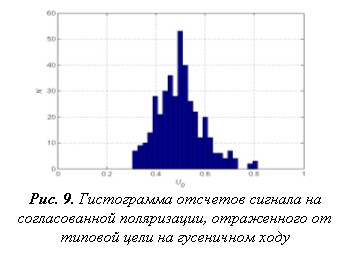
Примеры спектрограмм отраженных сигналов составляющих элементов ППМР целей приведены на рис. 6 – для объекта на гусеничном ходу и на рис. 7 – для объекта на колесном ходу.
На рисунках введены обозначения: В – вертикальная поляризация, Г – горизонтальная. Первая буква в заголовках рисунков означает поляризацию передатчика, вторая буква – поляризацию приемника.
Рисунки иллюстрируют качественные и количественные отличия параметров отраженных сигналов. Характер графиков поясняет физический смысл получения разделяющей информации по классам целей, который может быть основан на анализе отсчетов спектральной плотности мощности (СПМ) составляющих элементов ППМР.
В качестве примера на рис. 8 приведены нормированные относительно максимума оценки математического ожидания Sm и среднеквадратического отклонения
спектра сигнала, отраженного от бегущего человека на согласованной вертикальной поляризации. На рисунке обозначено: f0 – частота, соответствующая максимальному значению СПМ. Рисунок иллюстрирует характерные спектральные особенности отраженного сигнала, которые являются информативными признаками конкретного класса цели.
При анализе полученных данных было учтено следующее. В соответствие с теоремой взаимности должно выполняться равенство напряженностей поля на входах приемных антенн каналов стенда для перекрестных поляризаций при условии равенства напряженностей на выходах передающих антенн. Поэтому все отличия отраженных сигналов на ортогональных поляризациях обусловлены относительными погрешностями балансировки каналов по фазочастотным характеристикам и различным уровнем помех и собственных шумов приемо-передающей аппаратуры.
Анализ показал, что в качестве информативных признаков классов целей в одном стробе дальности и скорости можно использовать отсчеты СПМ сигнала. При этом важным условием правильного функционирования алгоритмов селекции классов целей является инвариантность к дальности и относительной скорости. Это может обеспечиваться либо соответствующей нормировкой информативных признаков, либо использованием инвариантных алгоритмов.
Принятие решений о принадлежности целей определенному классу осуществляется на основе обработки сигналов по всем информативным признакам элементов ППМР с учетом их корреляционных связей.
Теория проверки гипотез базируется на байесовской схеме принятия решений, в соответствии с которой априорные вероятности появления на входе системы классов сигнала
и помехи
полагаются известными. В соответствии с байесовским критерием, минимизирующим ошибку решения, решающее правило имеет вид [2]
, (1)
где
– вектор наблюдений;
,
– классы сигнала и помехи, соответственно;
– отношение правдоподобия, определяющееся через условные плотности вероятности классов сигнала
и помехи
по соотношению
. (2)
В случае распознавания M классов апостериорная вероятность принадлежности объекта к каждому классу
можно определить в соответствии с формулой Байеса
. (3)
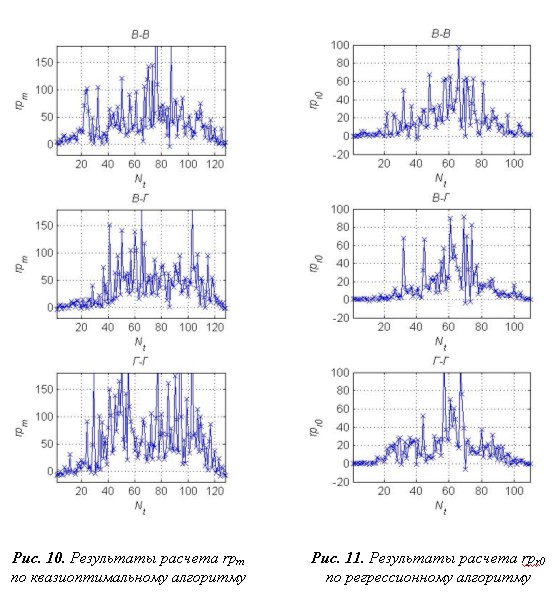
Одним из способов получения байесовых оценок многомерных плотностей распределения, характеризующих случайный характер изменения информативных признаков для целей различного типа, является использование гистограмм, рассчитанных по экспериментальным данным. Гистограммы распределения рассчитаны для отраженных сигналов от всех типов целей. На рис. 9 приведен пример гистограммы распределения нормированных спектральных отсчетов сигнала по одному из признаков на согласованной вертикальной поляризации для типовой цели на гусеничном ходу. На рисунке обозначено U0 – нормированное напряжение, N – количество случайных отсчетов признака, попавших в интервал квантования.
Для устранения корреляционных связей между признаками и возможности сокращения размерности признакового пространства проведена ортогонализация ковариационных матриц. При этом каждый новый признак представляет собой линейную комбинацию множества исходных признаков, что приводит к нормализации законов распределения признаков в новом пространстве.
С целью анализа возможностей селективной избирательности рассмотрены несколько алгоритмов обнаружения и распознавания классов целей. При попарном сравнении сигнал от одной из целей относится к классу полезных, от другой – к помехе.
При использовании статистического подхода для решения задач обнаружения и распознавания нормально распределенного полезного сигнала на фоне помех квазиоптимальные алгоритмы имеют вид [3]:
, (4)
, (5)
где
– спектральная плотность шума в полосе 0…fB;
,
– оценки случайных параметров принятого сигнала;
,
– математические ожидания случайных параметров
,
;
– элементы матрицы, обратной ковариационной матрице
; N – размерность вектора информативных признаков;
,
– пороговые уровни в алгоритмах обнаружения и распознавания, соответственно; верхние индексы ‘с’ и ‘п’ обозначают принадлежность параметров сигналу или помехе, соответственно.
Регрессионные алгоритмы обнаружения и распознавания реализуются с помощью множественной начальной регрессии
,
(6)
где
– коэффициенты множественной начальной регрессии.
Коэффициенты множественной начальной регрессии рассчитываются из условия минимума среднего значения квадрата ошибки множественных начальных регрессионных представлений [3]
, (7)
где E[ ] – оператор математического ожидания.
Алгоритмы работы многоканальной регрессионной системы обнаружения и системы распознавания соответственно имеют вид:
, (8)
, (9)
где
,
– пороговые уровни в регрессионных алгоритмах обнаружения и распознавания, соответственно;
,
– элементы матрицы
, обратной матрице корреляционных моментов.
Регрессионные алгоритмы многоканальной системы обнаружения и распознавания можно также реализовывать на основе использования множественной центральной регрессии. При этом в формулах (8)…(9) входящие в них величины должны быть центрированы.
На рисунке 10 приведены результаты расчетов величин превышения порога распознавания по квазиоптимальному (rpm) алгоритму для объектов колесной техники типа 1 (цель) и гусеничной техники (помеха) на согласованных (В-В и Г-Г) и перекрестной (В-Г) поляризациях. На рисунке 11 приведены результаты вычислений превышения порога распознавания по регрессионному (rpr0) алгоритму для объектов гусеничной техники (цель) и колесной техники типа 2 (помеха). Модели целей и помех построены по 4 ракурсам наблюдения при движении объектов на различных скоростях. Инвариантность к скорости движения обеспечивается соответствующей нормировкой спектра по частоте, соответствующей максимуму СПМ на интервале времени анализа.
Из рисунков наглядно видно, что на различных поляризациях разделительные свойства объектов существенно различаются. Аналогичные результаты получены для всех типов целей. Поэтому, имеется возможность улучшения разделительных свойств алгоритмов за счет расширения признакового пространства при совместной обработке полной поляризационной матрицы рассеяния.
5. Заключение
Принятые технические решения по построению РЛК обладают следующими важными особенностями, имеющими конкретный практический смысл.
Синхронизация по времени радиолокационной информации и видеоинформации позволяет проводить визуальный контроль за фоно-целевой обстановкой и осуществлять привязку временных отсчетов сигналов к изображению цели.
Информация о синхронизированных с передатчиком квадратурных составляющих отраженного импульсного сигнала на ПЧ дает возможность:
- выделения любых стробов дальности из временных реализаций для проведения анализа и последующей обработки;
- формирования последовательностей с фазокодовой манипуляцией для проведения имитационного и физического моделирования соответствующих трактов обработки;
- проведения моделирования воздействия на тракты обработки активных и пассивных помех различного типа, например нестационарных, импульсных, узкополосных и широкополосных.
Информация о полной поляризационной матрице рассеяния в векторной форме как функции времени позволяет осуществлять:
- инвариантные преобразования относительно угла поворота плоскости поляризации;
- формирование последовательностей импульсов с поляризационной модуляцией сигнала для проведения имитационного и физического моделирования соответствующих трактов обработки;
- моделирование воздействия на тракты обработки естественных и организованных поляризационных помех (случайного и детерминированного характера).
Кроме того, полученные данные позволяют проводить анализ и имитационное моделирование влияния шумовых параметров трактов обработки на выходные характеристики систем селекции.
Полученные результаты экспериментальных исследований дали возможность провести оценку энергетических, спектральных и поляризационных характеристик сигналов, отраженных от типовых наземных движущихся целей на фоне различных подстилающих поверхностей.
Использование нормированных отсчетов спектральной плотности мощности отраженных сигналов на различных поляризациях в качестве отличительных признаков позволило провести селекцию целей по классам. При этом обеспечивается инвариантность к дальности и относительной скорости.
Проведенные исследования позволяют использовать их результаты при построении алгоритмов автоматической классификации целей и при проектировании радиолокационных информационных систем селекции миллиметрового диапазона волн.
Результаты исследований получены в процессе выполнения НИР по проекту «Проведение поисковых научно-исследовательских работ по направлению «Радиофизика, акустика и электроника» в рамках мероприятия 1.2.2 Программы», выполняемому в рамках мероприятия 1.2.2 «Проведение научных исследований научными группами под руководством кандидатов наук» направления 1 «Стимулирование закрепления молодежи в сфере науки, образования и высоких технологий» федеральной целевой программы «Научные и научно-педагогические кадры инновационной России» на 2009 – 2013 годы.
Литература
1. Борзов А.Б., Соколов А.В., Сучков В.Б. Цифровое моделирование входных сигналов систем ближней радиолокации от сложных радиолокационных сцен. // Успехи современной радиоэлектроники, 2004.- № 9-10. - С. 38-61.
2. Патрик Э. Основы теории распознавания образов: Пер. с англ. / Под ред. Б.Р.Левина.- М.: Сов. радио, 1980.- 408 с.
3. Хохлов В.К. Обнаружение, распознавание и пеленгация объектов в ближней локации: Учеб. пособие.- М.: МГТУ им. Н.Э.Баумана, 2005.- 336 с.