|
“ЖУРНАЛ РАДИОЭЛЕКТРОНИКИ” N 9, 2009 |
Практическое использование сверхширокополосных радаров
И. Я. Иммореев
Московский авиационный институтПолучена 10 августа 2009 г.
Рассматриваются практические приложения сверхширокополосных (СШП) радаров, работающих простыми сигналами (без внутриимпульсной модуляции) с шириной спектра 500 МГц и более. Приведены результаты использования таких радаров для дистанционного и бесконтактного контроля физиологических параметров человека в медицине или при выполнении работ, связанных с повышенной опасностью. Показаны возможности СШП радаров для обнаружения двигающихся и неподвижных людей за оптически непрозрачными преградами (стена, дым, обломки строительных конструкций) или в растительности (кустарник, лес) и использование таких радаров для антитеррористической деятельности или охраны объектов. Представлено также использование многопозиционного СШП радара для определения точного местоположения источника радиосигнала (радиометки), расположенного на человеке или материальном объекте. Приведены описания СШП радаров, разработанных научно-исследовательским Центром сверхширокополосных технологий Московского авиационного института и реализующих указанные выше практические приложения.
Ключевые слова: сверхширокополосные радары, дистанционный контроль, бесконтактный контроль физиологических параметров человека.
Введение
Анализ областей использования СШП радаров показывает, что основные ограничения здесь определяются уровнем излучаемой мощности. Применение простых сигналов с длительностью τ в единицы наносекунд для обнаружения и распознавания целей уже на дальностях, превышающих километр, требует излучения импульсных мощностей в единицы и десятки мегаватт, а с увеличением дальности – в единицы и десятки гигаватт (рис. 1). Генераторы с такой мощностью являются уникальными устройствами, требуют применения элементов с высокой электрической прочностью, вызывают негативное экологическое воздействие, как за счет рентгеновского излучения, так и за счет прямого электромагнитного излучения.
Снижение пиковой мощности в таких радарах, в принципе, возможно традиционным путем - переходом к сложным, кодированным сигналам с большой базой и к их последующей согласованной фильтрации. Однако изменение формы СШП сигнала в процессе радиолокационного наблюдения [1] не позволяет использовать этот метод.
Получить необходимый потенциал в таких радарах можно также с помощью активных антенных решеток. Однако это требует высокой временной стабильности систем управления генераторами решетки, технология которых в настоящее время разработана недостаточно.
Но даже не сложность технических решений является главным препятствием для создания СШП радаров относительно большой дальности. Благодаря широкому частотному спектру сигнала эти радары создают помехи многим другим радиосистемам. Поэтому электромагнитная совместимость СШП радаров является основным ограничением, определяющим перспективы их развития. Имеющиеся нормативные документы, жестко ограничивающие уровни излучения СШП систем [2, 3], допускают создание только маломощных СШП радаров, которые могут работать на дистанциях в единицы и десятки метров (рис. 2).
Тем не менее, СШП радары именно этого класса нашли самое широкое применение в различных областях человеческой деятельности и эффективно используются в тех случаях, когда есть необходимость в дистанционном и бесконтактном наблюдении за объектами на коротких расстояниях и точном определении их статических или динамических координат.
При создании СШП радаров, как и при создании узкополосных радаров, используется свойство электромагнитных волн отражаться от поверхности раздела двух сред с различными параметрами. Однако имеется ряд принципиальных и схемных отличий между этими типами радаров [1]. В СШП радарах отсутствуют резонансные системы, предъявляются жесткие требования к скорости переключения элементов (наносекунды) и длительности переходных процессов (пикосекунды). Существует проблема создания нерезонансных антенных систем, обладающих высоким коэффициентом усиления в широкой полосе частот.
СШП радары малой дальности, как правило, работают в условиях высокого уровня пассивных помех - сигналов, отраженных от стен помещения и неподвижных объектов. Эти сигналы имеют большую амплитуду и маскируют полезный сигнал, отраженный от движущегося объекта. Чтобы уменьшить воздействие пассивных помех, приемник СШП радара открывается только в момент прихода сигнала, который отражен от объекта, находящегося на определенном расстоянии. Эта задача выполняется временным дискриминатором на основе быстродействующих электронных ключей, который осуществляет стробирование приемника. Время переключения составляет примерно 200-300 пикосекунд. Дискриминатор подключает приемную антенну к входу приемника в моменты прихода сигналов, отраженных от объекта. Эти моменты определяются временем задержки управляющего сигнала в программно управляемой линии задержки. В остальное время приемник закрыт. Принятые сигналы поступают на амплитудный или фазовый детектор, осуществляющий обнаружение сигнала, затем усиливаются в интегрирующем усилителе, постоянная времени которого выбрана в соответствии с шириной полосы частот полезного сигнала. Например, при измерении параметров жизненной активности человека ширина полосы полезного сигнала составляет около 40-50 Гц, что соответствует накоплению 10 ~ 30 тысяч импульсов. Накопление позволяет уменьшить среднюю мощность передатчика и увеличить отношение сигнал шум на входе усилителя.
Накопленный и усиленный низкочастотный сигнал поступает в аналого-цифровой преобразователь (АЦП) и далее в микропроцессор обработки или компьютер. Управление всеми операциями радара осуществляется микроконтроллером, который реализует заданный алгоритм управления, контролирует состояние элементов и модулей радара и обеспечивает вывод данных для дальнейшей цифровой обработки в микропроцессоре или компьютере.
В СШП многопозиционной системе (системе позиционирования) используется разностно-временной (гиперболический) метод определения местоположения объектов, излучающих СШП сигналы, в некотором контролируемом пространстве. Метод позволяет определить координаты объекта по разностям моментов появления сигналов (разностям времен запаздывания) от несколько приемников, расположенных по периметру контролируемого пространства.
Для определения разности времен запаздывания сигналов в каждом из каналов приема используется время - цифровой преобразователь (ВЦП), который позволяет определять интервалы времени с высокой точностью. По полученным данным в ЭВМ или микроконтроллере радара производится расчет местоположения источника излучения.
В научно-исследовательском Центре сверхширокополосных технологий Московского авиационного института разработан ряд СШП радаров, описание которых приводится ниже.
Радар для круглосуточного мониторинга дыхания и пульса пациентов в реанимационных, ожоговых отделениях больниц и детских отделениях родильных домов.
Контроль состояния тяжелых больных в реанимационных и ожоговых отделениях больниц и госпиталей в настоящее время осуществляется с помощью приборов, имеющих непосредственный контакт с телом больного: электрокардиографа, измерителя артериального давления и другого оборудования. Датчики этих приборов соединены с внешними регистрирующими устройствами с помощью проводов или шлангов. Все это создает некомфортные условия для тяжелых, послеоперационных больных и совсем непригодно для использования при повреждении кожных покровов, например при ожогах. Последнее относится также к контролю состояния новорожденных детей в детских отделениях родильных домов.
Радар контролирует дыхание и пульс больного дистанционно и бесконтактно на расстоянии от 30 см до 3¸5 м. Импульсная мощность радара равна 9 мВт, средняя мощность - 0.05 мВт. Выходная информация радара в виде численных значений ритма дыхания и ритма сердца через установленный интервал времени (например, через 1 минуту) отражается на табло радара и по беспроводному каналу связи передается на пульт дежурной сестры или дежурного врача (рис. 3). При переходе частоты пульса или частоты дыхания через заданные (верхний или нижний) значения порогов, радар выдает сигнал тревоги.
Для визуального наблюдения за дыханием и сердечной деятельностью человека, радар позволяет вывести на экран монитора истинную траекторию движения грудной клетки и сердца (рис. 4).
Верификация (точность измерений) радара проверяется сравнением его данных с данными электрокардиографа. На рис. 5 представлены траектория движения сердца (после фильтрации сигнала дыхания) и одновременно снятая контрольная электрокардиограмма.
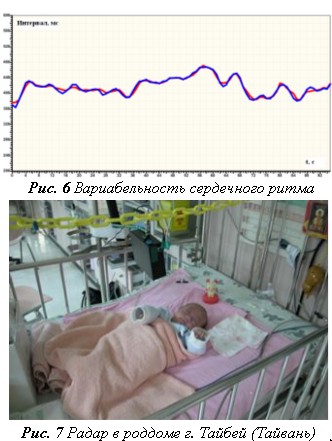
Результаты проверки приведены на рис. 6, где показаны изменения систолического периода между ударами сердца на некотором временном интервале (вариабельность сердечного ритма). Красной линией показано измерение вариабельности сердечного ритма с помощью радара, синей линией – с помощью электрокардиографа. Коэффициент корреляции между этими измерениями, проверенный в большом числе экспериментов, не падал ниже 0.94. Высокая точность измерения достигается за счет малой длительности сигналов, излучаемых СШП радаром – порядка 2-х наносекунд (полоса частот ~ 500 МГц).
Проведены клинические испытания радара в лечебных учреждениях России (реанимационное отделение 58-й клинической больницы г. Москвы, рис. 3) и Тайваня (детское отделение родильного дома в г. Тайбей, рис. 7). В последнем случае радары использованы для круглосуточного мониторинга дыхания и сердечной деятельности недоношенных детей в связи с высоким риском внезапной остановки их сердца [4].
Основными достоинствами радара являются:
- дистанционность и бесконтактность контроля основных физиологических параметров человека: дыхания и сердечного ритма.
- низкая стоимость при массовом производстве: стоимость радара в 2 - 3 раза ниже стоимости стандартного электрокардиографа.
По оценке кафедры кардиологии Московской медицинской академии им. Сеченова совместная обработка данных электрокардиографа, формируемых на основе электрических потенциалов сердца, и данных радара, формируемых на основе механических импульсов сердца, позволит значительно повысить диагностические возможности врачей, специализирующихся в этой области.
Радар подобного типа использован на малогабаритном дистанционно-управляемом робототехническом комплексе, предназначенном для эвакуации раненых с поля боя, с целью дистанционного и бесконтактного определения наличия дыхания у эвакуируемого человека.
СШП измеритель скорости пульсовой волны (СПВ) и вариабельности сердечного ритма (ВСР).
Заболевания органов сердечно-сосудистой системы в последние десятилетия носят характер эпидемии, поражая наиболее трудоспособную часть населения. Эта патология занимает лидирующие позиции в общей структуре смертности. Одним из основных методов борьбы с данным видом патологии является раннее выявление ухудшения эластичности сосудистой стенки артерий (ригидность) путем измерения скорости пульсовой волны (СПВ) в артериях. Всемирная организация здравоохранения, Европейское общество кардиологов и Всероссийское научное общество кардиологов предложили рассматривать повышение ригидности артерий как мощный независимый предиктор (предсказатель) сердечно-сосудистых заболеваний и рекомендовали использовать измерение СПВ при скрининге (массовых профилактических осмотрах населения) [5-7].
СШП радар позволяет проверить эластичность сосудистой стенки артерий бесконтактно за счет измерения параметров кровотока, протекающего в зоне слабого электромагнитного поля, излучаемого радаром. Одновременно радар позволяет регистрировать другой важный диагностический параметр – вариабельность (изменение) сердечного ритма.
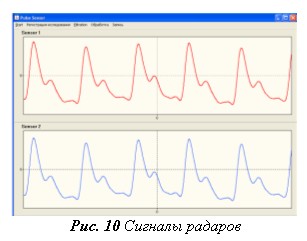
Измеритель состоит из двух радаров (рис. 8). Обработка сигнала и отображение информации производится в компьютере. На рис. 9 показан процесс проведения измерений. Выходная информация представляется в виде графиков (рис.10) и величины СПВ в м/сек.
Проведены клинические испытания измерителя в ряде медицинских центров России (НИИ кардиологии им. М.И. Мясникова, Москва; Клиническая больница №58, Москва; Клиника Смоленской государственной медицинской Академии; Областная клиническая больница, Н-Новгород). Получены положительные заключения.
Основными преимуществами измерителя перед зарубежными образцами являются:
- простота и малое время измерений (2-4 мин.) без снятия одежды, что особенно важно при массовых профилактических осмотрах;
- низкая стоимость при массовом производстве: по имеющимся расчетам и ценовым данным стоимость измерителя в 3 - 8 раз ниже стоимости зарубежных приборов для измерения СПВ.
- дополнительное измерение вариабельности сердечного ритма с распечаткой данных для врача.
Радар для дистанционного мониторинга психофизиологических показателей человека.
Одной из важнейших проблем медицины является сохранение и восстановление высокой профессиональной работоспособности человека – оператора, выполняющего ответственную работу, требующую постоянного внимания (машинист тепловоза, водитель рейсового автобуса, дежурный у пульта атомной электростанции или ракетной установки и др.). Для решения этой проблемы необходим постоянный мониторинг состояния человека – оператора в процессе выполнения им своих обязанностей, позволяющий быстро оценить изменение процессов адаптации организма к окружающей обстановке.
Другой, не менее важной, проблемой является оценка потенциальных психофизиологических возможностей человека, получаемая во время его работы на экстремальных тренажерах или при проведении компьютерного тестирования с использованием экстремальных тестов.

Одним из наиболее эффективных методов оценки и диагностики психофизиологического состояния человека – оператора, является непрерывный анализ его функциональных состояний по сердечному ритму (кардиоинтервалометрия) и по ритму дыхания. Для реализации этого метода разработаны алгоритмы автоматической диагностики и создано диагностическое программное обеспечение.
В настоящее время получение исходной информации для указанной диагностики доступно, в основном, с помощью контактных методов, что, в ряде случаев, создает большие, а иногда непреодолимые, трудности для осуществления мониторинга.
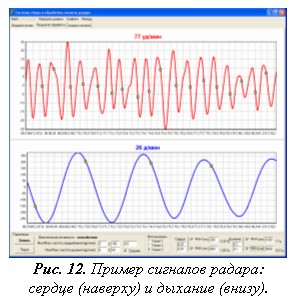
Сверхширокополосный радар (рис. 11) позволяет получить исходную информацию для мониторинга на расстоянии до 10 метров, непрерывно регистрируя физиологические показатели человека (рис. 12).
Выходная информация радара содержит количественную оценку реакции организма на изменение внешней обстановки в условных единицах (баллах) по 10-балльной шкале, апробированной на больших контингентах людей.
По этим оценкам выделяются пять основных групп состояний:
0¸1 - норма.
2¸4 - умеренное функциональное напряжение.
5¸6 - выраженное функциональное напряжение.
7¸8 - резко выраженное функциональное напряжение.
9¸10 - астенизация (истощение) регуляторных систем.
Импульсная мощность радара равна 10 мВт, средняя мощность – 80 мкВт. Короткие СШП импульсы (~ 2 нс) позволяют создать малый по объему сектор измерения радара и практически исключить влияние движения других объектов вне этого сектора.
Создано несколько образцов радаров, позволяющих производить мониторинг на расстояниях от 0,5 до 10 метров до человека. Зарубежные и отечественные аналоги подобных приборов не известны.
Радар для обнаружения людей за оптически непрозрачными преградами.
Для повышения безопасности бойцов контртеррористических подразделений при проведении боевых операций и быстрого поиска пострадавших людей при ликвидации последствий природных и техногенных катастроф, необходимы технические средства, позволяющие обнаруживать живых людей за оптически непрозрачными преградами: стенами различной толщины, снежными лавинами, развалинами зданий и сооружений. Наиболее пригодны для решения этой задачи сверхширокополосные (СШП) радары. Малая длительность сигнала обеспечивает высокую точность определения местоположения человека за преградой и устойчивую работу радара в условиях многократных переотражений от окружающих предметов. На рис. 13 показаны сигналы СШП радара, который находится на расстоянии 3-х метров от кирпичной стены, имеющей толщину 50 см и обеспечивает наблюдение человека за стеной, как при его перемещении по помещению, так и в неподвижном положении - по движению грудной клетки.
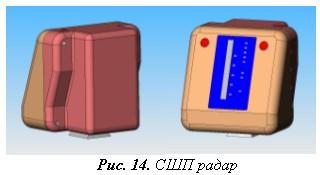
С учетом этих особенностей разработан макет СШП радара, внешний вид которого показан на рис. 14. Радар позволяет обнаруживать живых людей за оптически непрозрачной преградой, находясь на расстоянии до 10 от стены, и обеспечивать обнаружение двигающегося и неподвижного человека на расстоянии до 10 метров за стеной. Дистанция за стеной разделена на элементы разрешения протяженностью 30см. Погрешность измерений не превышает 5%. Радар имеет два рабочих режима: обнаружение двигающегося человека с темпом 2с и обнаружение неподвижного человека (по его дыханию) с темпом 10с. Переход из одного режима в другой производится вручную. Информация о дальности до обнаруженных объектов отображается на светодиодном табло на верхней панели радара.
Для одновременного наблюдения за всей дистанцией, радар позволяет вывести на экран дополнительного монитора сигналы из каждого элемента дальности (рис. 15). Элементы дальности, в которых сигнал превысил порог (зеленая линия) высвечиваются на светодиодном табло.
Чтобы устранить влияние движения рук оператора на результаты наблюдения, работа радара производится с переносной легкой опоры. Корпус макета радара обеспечивает его защиту от пыли и влаги и выдерживает механические нагрузки в соответствии с действующими нормами.
Подготовлена модификация радара, предназначенная для точного определения местоположения неподвижных живых людей под развалинами зданий и сооружений за счет использования многопозиционных измерений.
Система охраны территории от незаконного проникновения людей и техники.
Система охраны территории от несанкционированного проникновения людей и техники предназначена для регистрации нарушения границы контролируемой и охраняемой зоны движущимися объектами (человек, животное, техника) и контроля передвижения объекта в пределах этой зоны. Граница контролируемой и охраняемой зоны устанавливается перед границами периметра охраняемой территории. Охраняемыми объектами могут быть места дислокации войск и военной техники, площадки для мобильных установок МБР, атомные электростанции и другие стратегические объекты.
Система охраны является многопозиционной радиолокационной системой, расположенной по периметру охраняемой территории (рис.16). Каждый радар системы осуществляет контроль в секторе ~100 метров по дальности и ~200 метров по периметру охраняемой зоны. Для охраны всего периметра используется несколько радаров, которые располагаются вдоль границы с некоторым перекрытием секторов контроля. Система разрабатывается на основе СШП радаров, работающих сигналами с длительностью порядка 2-х наносекунд. Такие сигналы позволяют обеспечить разрешающую способность радиолокаторов по дальности порядка 30 см. Благодаря малой длительности сигнала существенно уменьшает мощность сигналов, отраженных от подстилающей поверхности, на фоне которых радар должен обнаружить слабый сигнал, отраженный от движущейся цели. Внешний вид СШП радара системы охраны показан на рис. 17.
Построение системы – модульное, позволяющее формировать систему под любой периметр охраняемой территории или при изменении этого периметра. Количество модулей, входящих в состав системы, определяется площадью и конфигурацией периметра охраняемой территории. Управление системой осуществляется от единого центра управления, где концентрируется и совместно обрабатывается информация, поступающая от всех модулей.
Система может быть использована для охраны как стационарных, так и мобильных объектов.
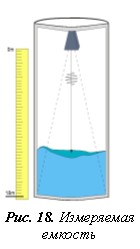
СШП радар для измерения уровня жидкости (вода, нефть, жидкий газ) в большой емкости.
Часть нефтяных вышек, работающих на больших глубинах берегового шельфа, располагается на плавающих платформах. Для стабилизации положения вышки, платформа располагается на двадцати емкостях-поплавках, имеющих около 20 м высоты и около 10 м в диаметре. Стабильность всего сооружения обеспечивается постоянным поддержанием необходимого уровня морской воды в каждой из емкостей платформы. Для высокоточного контроля уровня воды в емкости используются СШП радары. Радар производит измерение уровня жидкости в емкости на глубине до 20 м (рис. 18). Полученные данные передаются на диспетчерский пункт по проводной линии связи с интервалом 30 с.
Передатчик радара излучает импульсы длительностью 2 нс с частотой порядка 5 МГц. Приемник радара построен по схеме амплитудного детектирования с автоматическим регулированием порога компаратора, в который поступает отраженный сигнал после амплитудного детектора. Время пролета сигнала до поверхности воды и обратно оценивается время-цифровым преобразователем (ВЦП) с точностью около 50 пс. Это позволяет обеспечить точность измерения уровня жидкости в емкости со среднеквадратической ошибкой ±5 мм. После приема первого отраженного сигнала приемник радара закрывается, что позволяет избежать попадания в приемник сигналов отраженных от стенок емкости и расположенных в ней металлических деталей. Общий вид СШП радара, целиком расположенного на боковой стенке его рупорной антенны, показан на рис. 19.
Система точного определения местоположения персонала и/или оборудования в здании или на территории.
Необходимость в определении и постоянном контроле местоположения персонала и/или оборудования возникает в организациях, расположенных на больших территориях: от крупных госпиталей или больниц и больших супермаркетов до зон с повышенной опасностью, таких как нефтяные терминалы, атомные электростанции, большие надводные и подводные корабли и т.п.
Такое наблюдение и контроль обеспечивается с помощью сверхширокополосной, многопозиционной, радиолокационной системы (далее Система). Система, в зависимости от величины и конфигурации территории, состоит из некоторого количества приемных устройств, соединенных проводными или беспроводными линиями связи с единым центром обработки информации. Каждый контролируемый объект снабжен маломощным радиомаяком, периодически излучающим СШП радиосигналы с кодом, присвоенным данному объекту. Работа Системы заключается в высокоточном измерении разности времён распространения СШП сигнала от объекта до нескольких приемных устройств, координаты которых известны. Полученные значения разностей времени распространения передаются в центр обработки информации, где вычисляются координаты каждого объекта, которые затем передаются на единый контрольный терминал.
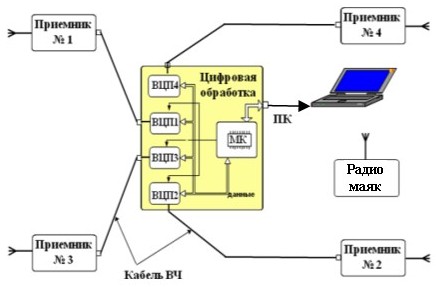
Рис. 20 Структурная схема Системы
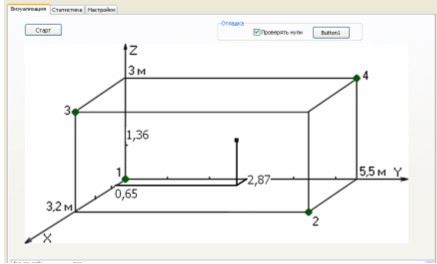
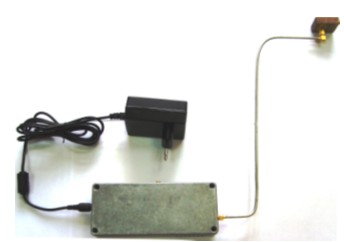
Разработан фрагмент Системы, структурная схема которого приведена на рис. 20. Сигналы от приемников по ВЧ кабелю передаются на время-цифровые преобразователи (ВЦП). Разность времени прихода сигнала для каждого приемника рассчитывается в ВЦП с пикосекундной точностью и передается в компьютер для расчета координат объекта. Точность определения координат объекта (среднеквадратическое отклонение от истинного значения) лежит в пределах от 0,5 метра до 5 см в зависимости от размеров и конфигурации помещения. Темп обновления данных о координатах объекта равен 5 с. Координаты объекта выдаются в числовом виде и в виде анимации помещения на экране монитора, показанной на рис. 21 (приемные устройства расположены в углах помещения, обозначенных цифрами 1,2,3,4, определяемый объект находится в красной точке). Общий вид одного приемного устройства Системы с антенно-фидерной системой и источником питания приведен на рис. 22.
Рис. 21 Определение положения объекта
Рис. 22 Приемное устройство
Система с четырьмя приемными устройствами может функционировать в помещениях площадью до 200-300 кв.м. При больших размерах помещения в Систему вводятся дополнительные приемные устройства.
Заключение
Представленный выше обзор областей применения СШП радаров подтверждает, что такие радары могут быть успешно использованы во всех тех случаях, когда мы нуждаемся в высокой точности измерения положения или параметров перемещения отдаленных контролируемых объектов, находящихся на относительно небольших расстояниях. Такие радары могут иметь достаточно большой рынок, как в России, так и за рубежом.
ЛИТЕРАТУРА
1. Иммореев И.Я. Сверхширокополосные радары. Особенности и возможности. Радиотехника и электроника. 2009, том 54, №1, стр. 5-31.
2. FCC 02-48, ET Docket 98-153, First Report and Order, April 2002.
3. FCC 04-285, ET Docket 98-153, Second Report and Order and Second Memorandum Opinion and Order, December 2004.
4. Immoreev I., Teh-Ho Tao. UWB Radar for Patient Monitoring. IEEE Aerospace and Electronic Systems Magazine. v.23, № 11, 2008, pp 11-18.
5. «Expert consensus document on arterial stiffness: methodological issues and clinical applications». 2006.
6. «Guidelines for the Management of Arterial Hypertension». 2007.
7. «Рекомендации Российского медицинского общества по артериальной гипертонии и Всероссийского научного общества кардиологов». 2007.