УДК: 621.396.96
СТРУКТУРа ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ
А. В. Дубровин1, Т. Я. Шевгунов2, В. В. Никишов1
1 ЗАО «РАДИЙ ТН»
2 Московский авиационный институт («МАИ» НИУ)
Статья получена 4 февраля 2015 г.
Аннотация. В настоящей работе рассматривается структура пассивной распределенной радиолокационной системы, выполняющей определение местоположения летательного аппарата при его заходе на посадку. Предложенная система состоит из нескольких узкобазовых подсистем, размещаемых в зоне аэропорта, и центрального пункта обработки, вычислительный комплекс которого реализует одноэтапные комбинированные алгоритмы оценивания по методу максимального правдоподобия. В работе приводятся оценки потенциальной точности для системы, состоящей из трех станций, оснащённых 32-элементными трехмерными антенными решетками. Также даётся описание опытного образца приемной станции, состоящего из антенной решетки, приёмника и комплекса цифровой обработки на базе универсальной ЭВМ.
Ключевые слова: оценка местоположения, пассивная радиолокационная система, угломерный метод, разностно-дальномерный метод, кольцевые антенные решетки, одноэтапные процедуры оценивания.
Abstract. This paper introduces an airport landing system based on passive radar positioning principles. The proposed system consists of a set of on-ground station receiving the signal sending by on-board transmitter. The central station of this distributed ground passive radar performs one-stage maximum likelihood estimation procedures for combined AOA/TDOA estimation which implements the essence of the system. The potentially achieved accuracy of the deployed prototype system was evaluated by means of simulation for the case of three receiving station equipped with three-dimensional phased array antenna consisting of four concentric antenna rings with 32 elements total. The system is on its developing stage and the modular design applied to assembling the receiving station of the system is also under investigation.
Keywords: position estimation, passive radar, AOA, TDOA, circular antenna arrays, one-step maximum likelihood estimation.
1. Введение
Возрастающая интенсивность воздушного сообщения и достижение пределов безопасной нагрузки на инфраструктуру существующих аэропортов сохраняет актуальной задачу разработки радиоэлектронных систем, позволяющих определять с высокой точностью координаты воздушного судна при его заходе на посадку. Основные классы развернутых в структуре аэропортов систем поддержки посадки, такие как курсоглиссадные системы (КГС), были разработаны несколько десятилетий назад. Они функционируют на основе принципов аналоговой обработки сигналов, относительная простота которых определила широкое распространение КГС в прошлом и их ведущее положение в настоящее время. Типично такие системы состоят из двух размещенных на земле передающих систем: курсового и глиссадного маяков. Оба маяка работают по схожим принципам – их антенные системы формируют два узких луча, смещенных в разные стороны относительно установленного направления посадки воздушного судна; в каждом луче передаётся пространственно-модулированный сигнал. После детектирования сигналов приёмником, расположенным на борту воздушного судна, по разности глубины модуляции двух принятых лучей оценивается текущее отклонение воздушного судна от предписанного направления захода на посадку.
Однако качество работы КГС и схожих с ней по принципу действия систем посадки микроволнового диапазона существенно снижается в тех случаях, когда диаграммы направленностей антенн курсового и глиссадного маяков претерпевают искажения. Такие искажения возникают из-за расположенных в зоне действия маяков объектов, интенсивно отражающих электромагнитные волны. Такие объекты могут быть как естественного происхождения, например, особенности рельефа местности, залежи минеральных руд, водоносные слои, так и искусственного, например, здания и сооружения. Также кратковременные искажения диаграмм направленности могут возникнуть из-за других летательных аппаратов, находящихся в воздухе или совершающих маневры на земле, а также служебных транспортных средств наземных служб аэропорта.
Одним из способов обеспечить требуемый уровень безопасности при возрастающей загрузке существующих аэропортов, а также при создании новых аэропортов в зонах интенсивной хозяйственной деятельности или в суровых климатических условиях, является использование системы сопровождения посадки, функционирующей на основе принципов пассивной многопозиционной радиолокации [1].
Структура такой системы была предложена авторами к обсуждению и опубликована в докладах двух международных конференций [2, 3] и ведущей всероссийской конференции [4]. В настоящей статье структура предлагаемой системы описывается подробно, а также приводятся расчёты её потенциальной точности, в дополнение к этому, в работе даётся описание уже разработанного прототипа её базового структурного модуля.
2. Структура системы
Предлагаемая распределенная система может быть структурно описана схемой взаимодействия между своими наземными и бортовыми компонентами с использованием диаграммы на рис. 1.
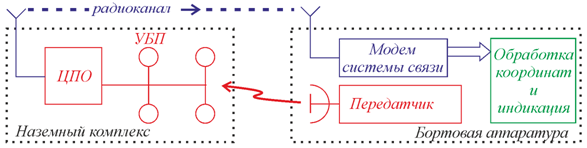
Рис. 1. Структурная схема распределенной системы посадки.
Наземная часть системы состоит из нескольких отдельных узкобазовых подсистем (УБП) расположенных в зоне аэропорта и центрального пункта обработки (ЦПО), соединённого высокоскоростной проводной сетью с каждой из станций.
Передатчик, размещенный на борту ЛА, излучает узкополосный шумоподобный сигнал с несущей частотой 50 МГц, 1,5 ГГц или 2,5 ГГц. Излучаемый сигнал принимается отдельными точками приёма (ТП) наземных УБП; принятые сигналы подаются на входы квадратурного демодулятора, каналы которого синхронизированы в пределах одной УБП. Синфазная и квадратурная компоненты дискретизируются и формируют цифровой комплексный сигнал, который в виде потока цифровых данных отправляется на ЦПО, где методами цифровой обработки из набора сигналов, полученных со всех УБП, извлекаются оценки координат положения бортового передатчика в момент излучения сигнала. Выполнение таких алгоритмов требует высокопроизводительных вычислительных систем, которые не могут быть размещены на борту в силу массогабаритных ограничений и высоких требованиям по энергопотреблению. Перенос ресурсоёмких вычислений в наземный ЦПО также открывает возможности применения специализированного центра обработки данных, использующего преимущества кластерной организации и многопроцессорных вычислений.
После оценки координат их вычисленные значения в цифровой форме по каналу передачи информации пересылаются на борт воздушного судна, где преобразуются в форму удобную для восприятия пилотом и функционирующими бортовыми автоматизированными системами. Так, например, на основе такой информации на жидкокристаллическом дисплее в кабине пилота может быть воспроизведены индикаторные приборы посадки. Точные и актуальные координаты летательного аппарата могут быть использованы непосредственно в числовой форме в качестве входных данных для автоматизированных систем управления посадкой.
Необходимо отметить, что хотя эффективное размещение УБП в пределах зоны аэропорта способно повысить точность системы, на расположение приёмных станций накладывается ряд ограничений природного (ландшафт) и технического (размещение инфраструктуры, правила движения воздушных судов) характера. Поэтому на текущем этапе исследования основным объектом оптимизации является антенная система.
Каждая УБП наземной приёмной части включает в себя трехмерную антенную решетку, размещение антенных элементов которой реализует геометрию точек приёма, способную обеспечить требуемую точность оценки координат летательного аппарата. Исследуемые на настоящем этапе работы конфигурации антенных решеток строятся на основе совокупности кольцевых антенных решеток [5], концентрически размещенных на опорной мачте на некотором расстоянии друг от друга по вертикали.
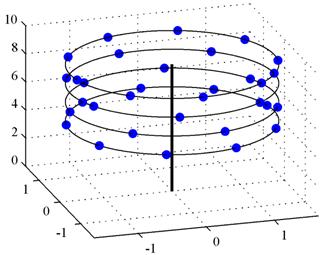
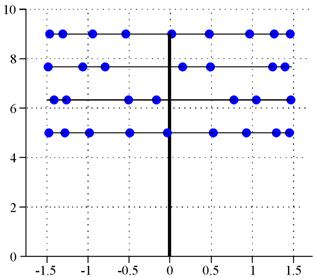
На рис. 2, а) представлен текущий прототип антенной решётки в проекции, состоящий из 4 антенных колец, размещенных на равном расстоянии друг от друга в верхней части 9-метровой мачты так, как изображено на рис. 2, б). Радиусы антенных колец одинаковы и равны 1,5 м. Первая группа колец образована верхним и нижним кольцами, которые содержат по 9 элементов, размещенных в вершинах правильного девятиугольника; одно из колец смещено на угол 20° по отношению к другому. Вторую группу образуют внутренние кольца, которые несут по семь элементов, размещенных в вершинах правильного семиугольника; одно из колец смещено на угол 25,7° по отношению к другому. Группа девятиэлементных колец повернута по отношению к группе семиэлементных колец на некоторый произвольный угол, который может регулироваться. Подобное размещение элементов можно рассматривать как псевдослучайное размещение приемных элементов на боковой поверхности цилиндра, которое обеспечивает разрушение нежелательных периодических структур в диаграмме направленности антенной решетки.
|
a) |
б) |
|
Рис. 2. 32-элементаная антенная решетка: а) изометрическая проекция, б) вертикальная плоскость – мачта с четырьмя кольцами. Все размеры указаны в метрах. |
|
3. Алгоритмы оценки и их потенциальная точность
Ключевую роль в предлагаемой системе играют используемые алгоритмы оценки координат передатчика на основе обработки цифровых сигналов. Подробно описанная в литературе [1] многоэтапная реализация пеленгатора предполагает, что при использовании узкополосных радиосигналов первичными оцениваемыми параметрами для разностно-дальномерных систем являются временные задержки между сигналами, принимаемыми различными УБП, а для угломерных систем – фазовые задержки между сигналами в различных точках приёма одной УБП, реализованной антенной решеткой. Затем оценка координат излучателя формируется с использованием метода наименьших квадратов или одной из его модификаций, например, как в работе [6]. Однако в предыдущих работах первого автора [7–9] показано, что применение одноэтапного алгоритма, при котором оцениваемыми параметрами являются непосредственно координаты, позволяет существенно снизить вероятность появления аномальной ошибки при малых отношениях сигнал-шум. При этом возможно объединение угломерного метода, рассмотренного в [7], и разностно-дальномерного метода, исследованного в [8], в рамках единого алгоритма, что и приводит к структуре, известной как комбинированная пассивная система, принцип функционирования которой изложен в [9].
В основе алгоритмов оценивания такой системы лежит способ построения оценки на основе метода максимального правдоподобия [10], применение которого к такому классу задач описано в работах [7–9] и заключается в построении целевой функции, составленной относительно вектора оцениваемых параметров r, содержащего три координаты источника излучения. Используя некоторые эвристические предположения о возможности пренебрежения некоторыми неинформационными параметрами, мы можем записать выражение целевой функции в форме:
![]() (1)
(1)
где J2(r) and J3(r) отвечают за вклад угломерной и разностно-дальномерной компоненты соответственно. Компактные выражения для их вычисления следующие:
 (2)
(2)
 (3)
(3)
где N
– количество УБП, M – количество
точек приёма (антенных элементов) в каждой УБП (здесь мы полагаем их одинаковым
для всех УБП), F0 – несущая частота,
ΔF – полоса анализа
сигнала. Через ![]() обозначены фазовые задержки m-ой ТП для n-ой УБП, а через
обозначены фазовые задержки m-ой ТП для n-ой УБП, а через
![]() – временные задержки огибающих сигнала. Обе
группы параметров задержки являются функциями вектора r,
и эти зависимости
– временные задержки огибающих сигнала. Обе
группы параметров задержки являются функциями вектора r,
и эти зависимости![]() и
и ![]() от r выражаются следующим образом:
от r выражаются следующим образом:
 , (4)
, (4)
где с – скорость света, rn – радиус-вектор центра n-ой УБП, а rnm – радиус вектор m-ой точки приёма, входящий в состав n-ой УБП.
Входящие в формулу (1) выражения Unm(f) обозначают нормализованные спектры в m-ой точке приёма n-ой УБП:
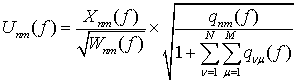 . (5)
. (5)
где Xnm(f) измеренный спектр, Wnm(f) – спектральная плотность мощности, а qmn(f) – отношение сигнал-шум.
Потенциально достижимая точность оценки координат может быть оценена нижней границей Крамера-Рао, представляющей для вектора r матрицу K размера 3×3, обратную матрице информации по Фишеру, записанной в фигурных скобках:
 (6)
(6)
где E обозначает единичную матрицу указанного в нижнем индексе размера, а 1 – квадратную матрицу, состоящую из всех единиц. Pτ и Pjn – константы для соответственно разностно-дальномерной и угломерной компонент системы, зависящие от количества УБП N и числа ТП M в них, ширины полосы сигнала 2Δf, несущей частоты f0, отношения сигнал-шум q и длительности приёма T:
 (7)
(7)
Через Bτ и Bjn обозначены матрицы, составленные из частных производных временных и фазовых задержек по координатам источника излучения r = (Xи, Yи, Zи):
 (8)
(8)
Фактически матрицы частных производных определяются взаимным геометрическим размещением УБП и составляющих их ТП. Подробный вывод и примеры вычислений скаляров Pτ, Pjn и матриц Bτ и Bjn для разных размещений УБП и выбора антенных структур приведены в работах [7–9].
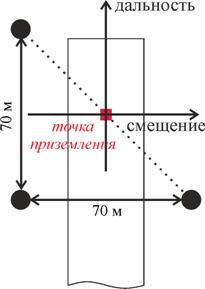
Рис. 3. Расположение УБП вокруг ВПП.
Для размещения УБП вокруг взлетно-посадочной полосы (ВПП), представленого на рис. 3, было проведено имитационное моделирование работы комбинированной одноэтапной системы определения местоположения источника радиоизлучения, расположенного на борту воздушного судна, совершающего посадку. Для упрощения сделано предположение, что летательный аппарат совершает движение в плоскости «дальность-высота», а его смещение остаётся постоянным и равным нулю.
На рис. 4, на верхнем графике, представлена траектория посадки воздушного судна, для аппроксимации которого в первом качественном приближении использована кубическая парабола [11]. Были выбраны следующие параметры излучаемого сигнала: несущая частота – 1,5 ГГц, ширина спектра принимаемого сигнала – 10 кГц, время измерения – 80 мс. На рис. 4 представлены зависимости среднеквадратического отклонения (СКО) оценок координат при отношении сигнал-шум 5 дБ.
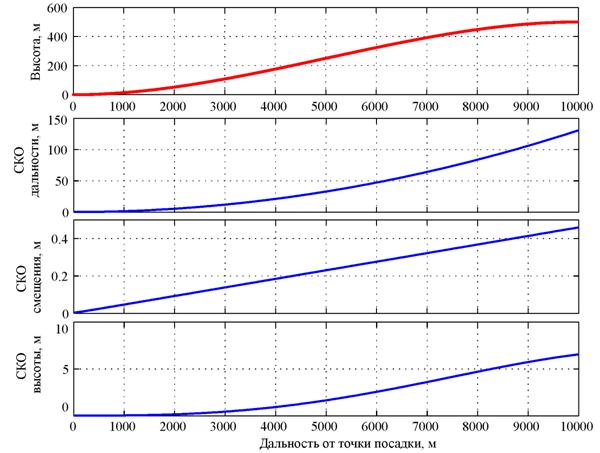
Рис. 4. Посадочная глиссада (верхний график) и точность оценки координат при отношении сигнал-шум 5 дБ.
Проведенное моделирование показывает, что точность определения высоты летательного аппарата, оцениваемая как среднеквадратическое отклонение, составляет не более 0,5 м уже на расстоянии 3 км от предполагаемой точки посадки.
4. Прототип приёмной станции
На текущем этапе разработки системы ЗАО «РАДИЙ ТН» спроектирован и произведен прототип приёмной станции, в состав которого входит антенная система, широкополосный синхронный аналоговый квадратурный демодулятор, блок аналого-цифровых преобразователей и модуль цифровой обработки сигналов. Характеристики станции-прототипа значительно превосходят характеристики будущих рабочих образцов, а её параметры и конфигурация может перестраиваться в широких пределах для проведения множества необходимых натурных экспериментов.
На рис. 5 представлена 13-элементаная кольцевая антенная решетка радиуса 1,5 м для наружного размещения. Антенные элементы поддерживаются соединенными с центральным диском балками, обеспечивающими необходимую жесткость конструкции и экранирующие фидерные тракты, ведущие к приемным модулям. Антенные элементы обладает чувствительностью не менее 5 мкВ/м в полосе 1 кГц при отношении сигнал-шум 10 дБ и способен работать в диапазоне частот от 20 МГц до 3 ГГц, обеспечивая почти всенаправленную диаграмму в азимутальной плоскости. Данная антенна может быть размещена на высоте до 9 м над землей посредственном специально разработанной для неё мачты.

Рис. 5. Активная 13-элементная кольцевая антенная решетка.
На рис. 6 представлена фотография собранных в единый блок квадратурного демодулятора, аналого-цифрового преобразователя и универсальной системы цифровой обработки на основе высокопроизводительного персонального компьютера.

Рис. 6. Квадратурный приёмник с блоками аналогово-цифрового преобразователя.
Многоканальный приёмный модуль выполняет квадратурную демодуляцию в синхронном режиме. Центральная частота преобразования демодулятора может изменяться в широком диапазоне: от 20 МГц до 3 ГГц, что полностью согласуется с рабочим диапазоном антенны. При этом полоса приёма сигнала может составлять величину вплоть до 60 МГц. Усиление каждого канала демодулятора регулируется с шагом 0,5 дБ и имеет цифровую регулировку. Многоканальный блок блок АЦП осуществляет дискретизацию синфазной и квадратурной компонент принятого сигнала с частотой до 100 МГц и квантованием до 16 двоичных разрядов. Модуль цифровой обработки реализован на базе персонального компьютера класса высокопроизводительной рабочей станции, обладающего следующими характеристиками: двухпроцессорный Intel Xeon, 8 ГБ ОЗУ DDR 3, интерфейс дисковой подсистемы SATA III. Компьютер подсоединён к локальной вычислительной сети по высокоскоростному интерфейсу Ethernet 1 Гбит/с.
5. Заключение
В заключение авторы хотят подчеркнуть, что в настоящий момент система находится на этапе разработки. Хотя прототип станции, реализующий узкобазовую подсистему, успешно произведен для натурных испытаний, полная технология производства и развертывания систем подобного класса находится на ранних стадиях разработки.
Одной из задач, которую предстоит решить, является повышение точности синхронизация между отдельными приёмными каналами, что исключит появление дополнительных ошибок измерения. Сложность этой задачи растёт с числом точек приёма, поэтому остаётся открытой задача оптимизации структуры антенной системы для достижения желаемых характеристик точности при меньшем числе каналов приёма.
Другой задачей является одновременное оценивание местоположений нескольких источников радиоизлучения. Эта задача требует усложнения целевой функции и пересмотра процедур поиска оптимума и математических методов оптимизации при поиске её максимума.
Проблема другого рода, решение которой пока отложено на более позднее время, состоит в интеграции новой системы с уже существующими системами в части привычной формы отображения информации для пилота, а также приведение формируемых системой сообщений к стандартам обмена информацией для совместного использования с другими, в т.ч. спутниковыми, навигационными системами.
Успешное решение ряда частных задач, в т.ч. и выше обозначенных, откроет перспективу создания экономичных всепогодных радиолокационных систем поддержки посадки, которые могут быть развернуты в условиях сложного рельефа местности и качество функционирования которых не будет зависеть от уже существующего размещения объектов инфраструктуры аэропорта и регламента передвижений технических средств.
Литература
1. Черняк В. С. Многопозиционная радиолокация. – М.: Радио и связь, 1993.
2. Shevgunov T., Dubrovin A., Nikishov V., Next-Generation Landing System Based on Combined Passive Radar // XXXI General Assembly of the International Union of Radio Science (URSI GASS 2014), Beijing, China, Aug. 2014.
3. Dubrovin A., Nikishov V., Shevgunov T., Combined AOA/TDOA Passive Radar for Airport Landing System, Tyrrhenian International Workshop on Digital Communication: Enhanced Surveillance of Aircraft and Vehicles (ESAV-2014), Rome, Italy, Sep. 2014.
4. Дубровин А.В., Никишов В.В., Шевгунов Т.Я., Разработка структуры пассивной радиолокационной системы для определения местоположения летательного аппарата при его заходе на посадку // VIII Всероссийская конференция научно-техническая конференция «Радиолокация и радиосвязь», ИРЭ РАН, 24-26 ноября 2014, стр. 42–46
5. Дубровин А.В. Потенциальная точность пеленгования комплексами с антенными решетками, имеющими конфигурацию в виде набора произвольного числа колец // Радиотехника и электроника, 2006, т. 51, № 13, с. 268-270.
6. Torrieri D. J., “Statistical Theory of Passive Location Systems”, IEEE Transactions on Aerospace and Electronic Systems, 1984, vol. 20, no. 2, pp. 183-198.
7. Дубровин А. В., Сосулин Ю. Г. Одноэтапное оценивание местоположения источника радиоизлучения пассивной системой, состоящей из узкобазовых подсистем // Радиотехника и электроника, 2004, т. 49, № 2, с. 156–170.
8. Дубровин А. В., Сосулин Ю. Г. Одноэтапное оценивание местоположения источника радиоизлучения пассивной системой // Радиотехника и электроника. 1998. Т. 43. № 12. С. 1486-1494.
9. Дубровин А. В., Сосулин Ю. Г., Одноэтапное оценивание местоположения источника радиоизлучения комбинированной пассивной системой // Радиотехника и электроника, 2007, т. 52, № 4, с. 441-457.
10. C. H.Knapp, G.C. Carter, The Generalized Correlation Method for Estimation of Time Delay, IEEE Transaction on Acoustic, Speech and Signal Processing, 1976, vol. 24, No. 4, p. 320–327.
11. Morante A., Vallejo J. A., Modelling the landing of a plane in a calculus lab, Int. J. Math. Educ. Sci. Technol., 2012, 43, No. 7, pp. 936-949.