УДК 621.396.96
ЗАКОНЫ РАСПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ОБНАРУЖЕНИЯ ПРОТЯЖЕННЫХ ОБЪЕКТОВ РАДИОТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ БЛИЖНЕГО ДЕЙСТВИЯ
В. М. Артюшенко 1, В. И. Воловач 2
1 ГБОУ ВПО МО «Финансово-технологическая академия», г. Королев
2 ФГБОУ ВПО «Поволжский государственный университет сервиса», г. Тольятти
Статья получена 11 января 2015 г.
Аннотация. Показано, что одним из важнейших вопросов при определении характеристик радиотехнических устройств ближнего действия является нахождение статистических распределений дальности обнаружения протяженных объектов. Отмечается, что при расчете ожидаемой дальности обнаружения названных устройств необходимо использовать вероятностно-статистические методы. Получены законы распределения дальности обнаружения объекта радиотехническими устройствами ближнего действия применительно к движущемуся обнаруживаемому протяженному объекту в зависимости от скорости его движения и характера отражающей поверхности с учетом статистических характеристик отраженных сигналов, а также условий работы и формы диаграммы направленности названных устройств. Полученные законы могут быть использованы для расчета характеристик обнаружения движущегося объекта в реальных условиях эксплуатации устройств ближнего действия.
Ключевые слова: радиотехническое устройство ближнего действия, протяженный объект, закон распределения дальности обнаружения, плотность распределения вероятности обнаружения, достоверность обнаружения, вероятностно-статистические методы, форма диаграммы направленности.
Abstract. It is shown that one of the most important issues when determining the characteristics of wireless short-range devices is the obtaining statistical distributions of the detection range of extended objects. To calculate the expected detection range of the mentioned devices, one should use probability and statistical methods. Distributions of the detection range of the object by short-range electronic devices are obtained fot the moving extended object, depending on its speed and the nature of the reflective surface taking into account the statistical characteristics of the reflected signals, as well as working conditions and forms of the pattern of the mentioned devices. The obtained laws can be used for calculation of the detection characteristics of a moving object in real operating conditions of short-range devices.
Key words: short-range radio device, extended object, the distribution of the detection range, density of distribution of detection probability, the accuracy of detection, probability and statistical methods, the shape of the pattern.
Введение
В настоящее время все более значительное распространение в различных областях получают радиотехнические устройства ближнего действия (РУБД) и технологические системы, построенные на их основе [1]. Они позволяют не только осуществлять обнаружение и определять параметры движения протяженных объектов, но и оценивать их местоположение и размеры, контролировать их взаимное перемещение и т. д.
Всё в большей степени эти устройства и системы используются для обеспечения личной и общественной безопасности, охраны собственности, предотвращения террористических актов и техногенных катастроф, контроля движения различных транспортных средств и т. п.
Функционирование РУБД наряду с решением задач, характерных для всех радиотехнических систем, имеет ряд специфических особенностей, связанных с небольшой удаленностью их приемопередающих антенн от обнаруживаемых протяженных объектов. Так, например, протяженный характер объекта, сравнимость геометрических размеров объекта с дальностью до него, многолучевой характер отражения сигналов и т. п. Именно такие устройства и будут рассмотрены далее.
При построении и расчете РУБД, определении количественных характеристик ожидаемой достоверности обнаружения, оценке эффективности обнаружения и измерения параметров движения протяженных объектов в различных условиях локации одним из важнейших вопросов является нахождение достоверного закона распределения дальности обнаружения. Для РУБД существуют определенные зависимости, использующие соответствующие критерии [2] и позволяющие оценивать ожидаемую дальность обнаружения R таких устройств и систем с той или иной точностью в зависимости от влияния на обнаружение объектов физических условий, в которых будет проводиться обнаружение. Также при оценке дальности обнаружения РУБД следует учитывать и такие параметры, как скорость движения обнаруживаемого объекта, характер его отражающей поверхности, а также статистические характеристики отраженных от обнаруживаемого объекта зондирующих сигналов и форму диаграммы направленности (ДН) РУБД.
1. Постановка задачи исследования
При практическом использовании РУБД интерес представляет нахождение статистических распределений дальности обнаружения объектов и определения на их основе законов распределения дальности обнаружения РУБД. Распределением дальности обнаружения будем называть соотношение, устанавливающее связь между возможными значениями дальности обнаружения РУБД и соответствующими вероятностями.
Зависимость вероятности обнаружения объекта от дальности P(R) может быть получена в результате многократно повторяемых опытов по обнаружению объекта, постепенно приближающегося к РУБД. Обычно интегральная кривая P(R) стремится к нулю на максимальных дальностях в силу недостаточной энергетической эффективности РУБД и возрастает по мере приближения объекта.
Опытным и аналитическим путем установлено [3], что объект, попавший в зону действия РУБД, редко обнаруживается на пределе дальности последнего. Значительно чаще обнаружение происходит на более близких расстояниях.
Вместе с тем также установлено, что в ряде случаев даже при относительно малых дальностях (значительно меньших средней дальности обнаружения РУБД) объект может не обнаруживаться. Дело в том, что обнаружение зависит не только от дальности до объекта, но и от ряда факторов, которые можно разделить на три группы:
– факторы, характеризующие РУБД;
– факторы, характеризующие условия распространения физических полей (сигналов) в среде;
– факторы, характеризующие обнаруживаемый объект.
В каждой из перечисленных групп имеются такие факторы, которые решающим образом влияют на закономерности изменения дальности обнаружения РУБД. Эти факторы обычно называют основными, или определяющими. Например, для радиолокационной станции это мощность передатчика, эффективная площадь антенны, эффективная поверхность рассеяния (ЭПР) цели (в случае РУБД обнаруживаемого объекта), длина волны. Изучая основные факторы, можно предсказать численное значение дальности обнаружения, не прибегая к специальному опыту.
Наряду с этим, следует отметить, что любому закономерному явлению, в том числе и обнаружению объектов, неизбежно сопутствуют случайные отклонения. Поэтому на практике, как бы точно и подробно ни были фиксированы условия опыта по определению дальности обнаружения того или иного РУБД, невозможно достигнуть того, чтобы при повторении опыта результаты в точности совпадали. Эти случайные отклонения обуславливаются наличием таких второстепенных факторов как изменение курсового угла объекта относительно РУБД, изотропность среды, нестабильность питающего напряжения, наличие «блестящих» точек [3, 4] и др.
Обнаружение объекта всегда более вероятно на некоторых средних дальностях, чем на больших или малых, так как обнаружение объекта на больших дальностях маловероятно, как было отмечено выше, в силу недостаточной энергетической эффективности РУБД. Вместе с тем, на малых дальностях обнаружение также маловероятно, поскольку объект, скорее всего, будет обнаружен на бóльших дальностях. Однако практика показывает, что в ряде случаев даже при относительно малых дальностях (значительно меньших средней дальности обнаружения РУБД) объект может не обнаруживаться.
В некоторых случаях может возникнуть необходимость получения аналитических выражений для оценки вероятности обнаружения по статистическому распределению дальности обнаружения РУБД. Для решения этой задачи необходимо установить математические законы, которыми можно характеризовать реальные распределения дальности обнаружения РУБД. Если рассматривать обнаружение объектов как случайный процесс, осуществляемый в достаточно однородных «типичных» условиях [5], то распределение дальностей обнаружения подчиняется определенному закону распределения.
На основании проведенных ранее теоретических [6-8] исследований, подтвержденных экспериментально [9, 10], по обнаружению сигналов, отраженных от протяженных объектов, можно сделать следующие выводы: 1. Сигнал, отраженный от протяженного объекта, хорошо описывается математической моделью многолучевого сигнала; 2. ПРВ огибающей (амплитуды) (ПРВА) в преобладающем большинстве случаев хорошо аппроксимируется ПВР Накагами [11].
2. Определение зависимости распределения дальности обнаружения РУБД
На основании вышесказанного, опираясь на полученные результаты, конкретизируем зависимости распределения дальности обнаружения РУБД при обнаружении движущихся протяженных объектов. Трудности непосредственного и точного определения ожидаемой величины дальности обнаружения R обусловлены тем, что влияние тех или иных факторов может носить не только достаточно устойчивый, но и часто неустойчивый характер, и поэтому обычно не поддаются заблаговременному учету и контролю.
В случае если объект, подлежащий обнаружению, находится на оси главного лепестка ДН РУБД и движется вдоль нее, дальность обнаружения такого устройства в зависимости от его параметров и характеристик объекта может быть определена по формуле:
где ![]() – мощность передачи излучаемого
(зондирующего) сигнала в сторону движущегося объекта, Вт; G – коэффициент усиления
приемо-передающей антенны; l – длина волны излучаемого сигнала, м; σ – ЭПР объекта, м2;
– мощность передачи излучаемого
(зондирующего) сигнала в сторону движущегося объекта, Вт; G – коэффициент усиления
приемо-передающей антенны; l – длина волны излучаемого сигнала, м; σ – ЭПР объекта, м2; ![]() – мощность сигнала на входе приемника
устройства обнаружения, Вт.
– мощность сигнала на входе приемника
устройства обнаружения, Вт.
Приведенное выражение описывает энергетическую дальность действия активных и пассивных РУБД. Выражение (1) справедливо в так называемых идеализированных условиях, служит лишь для иллюстрации прямого аналитического подхода к определению параметров РУБД и не может быть рекомендовано для практического использования.
Вместе с тем, проведение более точных расчетов с использованием выражения (1) требует и более тщательного учета характера предстоящих условий обнаружения и степени их влияния на дальность обнаружения объектов. Все это усложняет аналитические расчеты ожидаемой дальности обнаружения РУБД и ограничивает использование этих методик на практике.
Важно отметить, что методики прямых аналитических расчетов позволяют рассчитывать ожидаемую дальность обнаружения лишь как вполне определенную (детерминированную) однозначную характеристику. Они не учитывают существующую нестабильность физических условий, проявляющуюся во флюктуации параметров, характеризующих состояние РУБД, обнаруживаемых объектов и среды, тогда как обычно дальность обнаружения РУБД является не детерминированной, а случайной величиной, которая характеризуется тем или иным законом распределения вероятности ее появления.
При расчете ожидаемой дальности обнаружения РУБД необходимо использовать вероятностно-статистический метод, при котором успешность обнаружения объекта на той или иной дальности будет оцениваться с помощью статистически обоснованной вероятности получения указанной дальности.
Воспользовавшись соотношением [12], определим мощность сигнала на входе приемника
![]() ,
,
где Z – внутреннее сопротивление приемной
антенны; ![]() – напряжение сигнала на входе приемника
РУБД.
– напряжение сигнала на входе приемника
РУБД.
Введя в рассмотрение коэффициент
![]() , (2)
, (2)
после математических преобразований представим выражение (1) с учетом (2) в виде:
Если обнаруживаемый объект движется под углом a к главной оси ДН антенны РУБД, удобно перейти к декартовой системе координат (рис. 1), в начале координат которой расположен РУБД. В этой системе дальность определяется как
![]() , (4)
, (4)
где х – текущая
координата объекта; ![]() – расстояние от РУБД до
траектории движения объекта.
– расстояние от РУБД до
траектории движения объекта.
Тогда напряжение сигнала на входе приемника РУБД:
![]() . (5)
. (5)
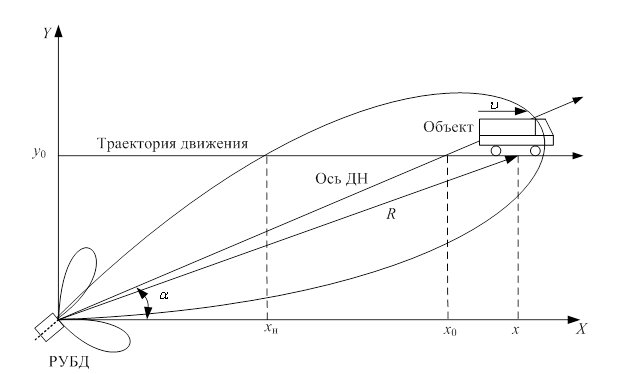
Рис. 1. Иллюстрация движения обнаруживаемого объекта
Как видно из (5), по мере движения зондируемого объекта в зоне действия неподвижного РУБД амплитуда обрабатываемого сигнала линейно зависит от координаты x.
Введем в рассмотрение
учет формы ДН РУБД. Обозначим ее как функцию ![]() , или в
декартовой системе координат
, или в
декартовой системе координат ![]() , в которой
, в которой ![]() – координата точки пересечения оси ДН
антенны и траектории движения объекта.
– координата точки пересечения оси ДН
антенны и траектории движения объекта.
С учетом формы ДН выражение (3), в полярной и декартовой системе координат примет, соответственно, вид:
Поскольку реальные ДН антенн имеют сложный трехмерный характер, то для практического использования желательно применять по возможности более простые аналитические соотношения. Так без учета влияния боковых лепестков ДН антенны РУБД хорошие результаты дает функция (рис. 2, а):
где П – ширина ДН на уровне 0,707.
Для учета реальной формы ДН можно использовать более сложное выражение, позволяющее учесть влияние боковых лепестков ДН антенны (рис. 2, б):
где b – характеризует ширину главного лепестка ДН.
|
|
|
|
а) |
б) |
|
Рис. 2. Функции диаграммы направленности антенны
РУБД: |
|
3. Определение зависимостей ПРВ обнаружения объекта
Рассмотрим зависимости ПРВ обнаружения объекта от расстояния между объектом и РУБД.
В том случае, если обнаруживаемый объект движется вдоль оси ДН РУБД со скоростью v, расстояние до него от РУБД изменяется по закону
![]() .
(8)
.
(8)
где ![]() – расстояние до
объекта в начальный момент обнаружения; t – время, в течение которого
обнаруженный объект двигается в зоне действия устройства обнаружения. В
выражении (8) знак "+" соответствует удалению объекта от РУБД, знак
"–" – приближению к нему.
– расстояние до
объекта в начальный момент обнаружения; t – время, в течение которого
обнаруженный объект двигается в зоне действия устройства обнаружения. В
выражении (8) знак "+" соответствует удалению объекта от РУБД, знак
"–" – приближению к нему.
С учетом (8) выражения для определения напряжения (3), соответственно, будут иметь вид:
![]() . (9)
. (9)
Если объект движется со скоростью v под углом к оси ДН (см. рис. 1), то дальность до объекта в момент его обнаружения будет определяться выражением:
где ![]() – начальная координата объекта в момент
вхождения в зону действия обнаружителя.
– начальная координата объекта в момент
вхождения в зону действия обнаружителя.
С учетом скорости движения объекта закон изменения дальности до обнаруживаемого объекта:
В этом случае выражение (6а), учитывающее ДН РУБД в декартовой системе координат запишется:
 . (12)
. (12)
Полученные значения дальностей обнаружения объектов в конкретных условиях практического использования РУБД могут сильно отличаться от величин, рассчитываемых по полученным формулам. Проведение более точных расчетов требует тщательного учета характера условий для работы РУБД и их влияния на дальность обнаружения объекта.
Известные [13] методики прямых аналитических расчетов позволяют рассчитать ожидаемую дальность лишь как однозначную характеристику и не учитывают существенную нестабильность физических условий, проявляющуюся, как было отмечено выше, во флюктуациях параметров, характеризующих состояние устройств обнаружения, объектов обнаружения, окружающей среды.
В зависимости от характера своего влияния все факторы, определяющие дальность обнаружения РУБД, могут быть разделены на постоянно действующие, медленно меняющиеся, быстро меняющиеся и случайные (непредвиденные).
Процесс обнаружения следует рассматривать как случайный процесс, а дальность обнаружения РУБД – как случайную величину, закономерности изменения которой, должны изучаться с помощью математического аппарата теории вероятности.
Учитывая, что ПРВА огибающей отраженного от протяженного объекта сигнала описывается распределением Накагами [14], определим зависимости распределения дальности для рассмотренных случаев.
Зависимость ПРВ обнаружения объекта на дальности R в полярной системе координат с учетом (6) запишем в виде:
 ,
(13)
,
(13)
где 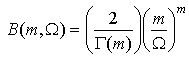 (Г – гамма-функция); m и Ω – параметры ПРВ Накагами.
(Г – гамма-функция); m и Ω – параметры ПРВ Накагами.
Учет движения объекта вдоль оси ДН с использованием (10) приводит к модификации предыдущего выражения:
 ,
(14)
,
(14)
Зависимость ПРВ
начального обнаружения объекта на расстоянии ![]() при
определении дальности в соответствии с (10) выражается как:
при
определении дальности в соответствии с (10) выражается как:

С учетом перемещения объекта вдоль оси X в декартовой системе координат, согласно выражению (11) запишем:

При флюктуации того или иного параметра, входящего в распределение (13) – (16) необходимо произвести усреднение по этому параметру [3].
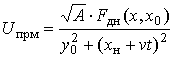
Вместе с тем, для
определения достоверности обнаружения протяженных объектов и, в частности,
вероятности обнаружения протяженного объекта ![]() (либо вероятности необнаружения
(либо вероятности необнаружения ![]() , а также вероятности ложного
обнаружения) на определенной дальности, может потребоваться учет формы ДН
антенны РУБД в соответствии с выражениями (7) либо (7а) [15]. Тогда выражение
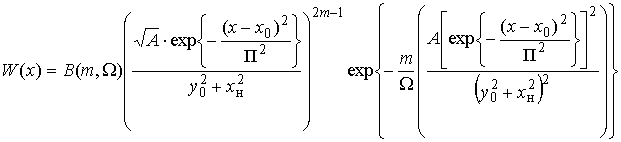
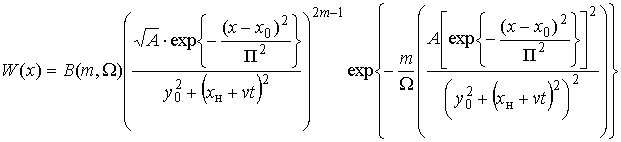
(15) с учетом функции формы ДН может быть представлено в виде:
, а также вероятности ложного
обнаружения) на определенной дальности, может потребоваться учет формы ДН
антенны РУБД в соответствии с выражениями (7) либо (7а) [15]. Тогда выражение
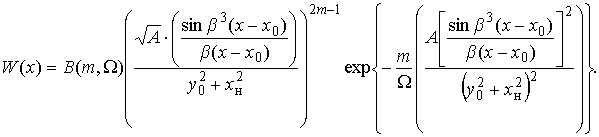
(15) с учетом функции формы ДН может быть представлено в виде:
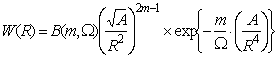
– без учета влияния боковых лепестков ДН (7) (рис. 3, а)
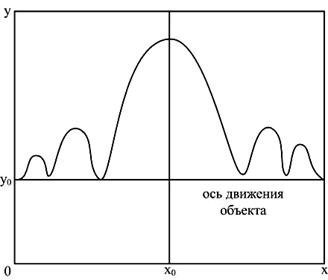
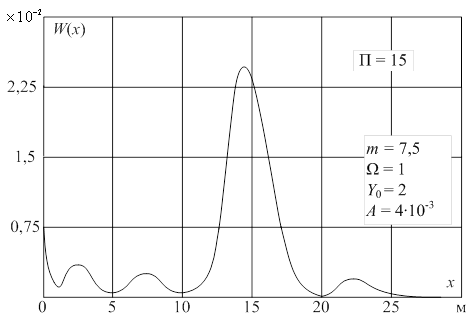
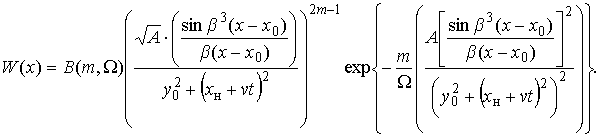
– с учетом влияния боковых лепестков ДН (7а) (рис. 3, б)
|
|
|
а) |
|
|
|
б) |
|
Рис. 3. ПРВ обнаружения РУБД: |
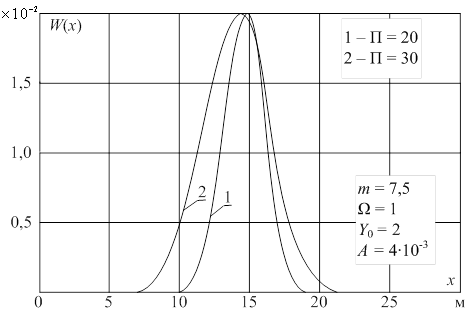
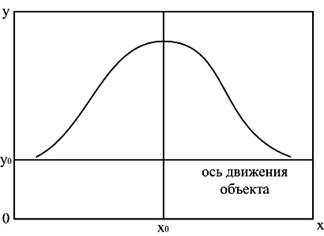
Если влияние боковых
лепестков ДН не учтено, видно (рис. 3, а), что кривая представляет собой
гладкую функцию колоколообразную по форме, максимальное значение которой
находится при ![]() . Учет боковых лепестков ДН в
соответствии с выражением (17а) приводит к тому, что функция распределения ПРВ
обнаружения объекта приобретает форму, отличную от гладкой (рис. 2, б).
. Учет боковых лепестков ДН в
соответствии с выражением (17а) приводит к тому, что функция распределения ПРВ
обнаружения объекта приобретает форму, отличную от гладкой (рис. 2, б).
С учетом влияния формы ДН антенны РУОБД, выражение (16) запишется следующим образом:
– без учета влияния боковых лепестков ДН
 ; (18)
; (18)
– с учетом влияния боковых лепестков ДН
 (18а)
(18а)
Анализ графиков ПРВ обнаружения РУБД, построенных для выражений (17) и (17а), показывает, что их форма существенно не отличается от соответствующих кривых на рис. 3.
Обычно на практике для инженерных расчетов с целью их упрощения принимают [3], что ПРВ дальности до протяженного объекта при движении вдоль оси ДН характеризуется гауссовским законом распределения
 (19)
(19)
где ![]() – дисперсия ПРВ;
– дисперсия ПРВ; ![]() – математическое ожидание.
– математическое ожидание.
В этом случае вероятность обнаружения протяженного объекта на дальности не менее требуемого значения R будет определяться выражением:
 , (20)
, (20)
где ![]() – максимальное расстояние, на
котором возможно обнаружение объекта,
– максимальное расстояние, на
котором возможно обнаружение объекта,
а вероятность необнаружения протяженного объекта (пропуска), при удалении его на дальность R, запишется в виде:
 .
(21)
.
(21)
где ![]() – минимальное расстояние
обнаружения РУБД объекта.
– минимальное расстояние
обнаружения РУБД объекта.
4. Выводы
Таким образом, были получены зависимости ПРВ обнаружения объекта с учетом изменяющейся дальности до РУБД применительно к движущемуся протяженному объекту, в зависимости от скорости его движения, характера отражающей поверхности, условий работы устройства обнаружения, с учетом статистических характеристик отраженных сигналов, а также формы диаграммы направленности радиотехнического устройства обнаружения.
Показано,
что уровень принимаемого сигнала ![]() зависит не только от
расстояния до протяженного объекта, но и от формы ДН антенны РУБД.
зависит не только от
расстояния до протяженного объекта, но и от формы ДН антенны РУБД.
Работа выполнена в рамках фундаментальной НИР, финансируемой из средств Минобрнауки РФ (Государственное задание на 2014 г., код 226).
Литература
1. Коган И.М. Ближняя радиолокация. М.: Сов. радио, 1973. 272 с.
2. Воловач В.И. Накапливающаяся вероятность обнаружения объектов в зоне контроля радиотехнических охранных устройств // Электротехнические и информационные комплексы и системы. 2011, т. 7, № 1. С. 17-20.
3. Воловач В.И. Методы и алгоритмы анализа радиотехнических устройств ближнего действия. М.: Радио и связь, 2013. 228 с.
4. Артюшенко В.М., Воловач В.И. Особенности отражения зондирующих сигналов радиотехнических устройств обнаружения от протяженных объектов сложной формы // Школа университетской науки: Парадигма развития. 2012, № 2 (6). С. 42-46.
5. Воловач В.И. Исследование плотности распределения вероятностей обнаружения объекта с учетом изменяющейся дальности // Известия вузов России. Радиоэлектроника. 2013, № 4. С. 71-75.
6. Artyushenko V.M., Volovach V.I. Statistical Characteristics of Envelope Outliers Duration of non-Gaussian Information Processes // Proceedings of IEEE East-West Design & Test Symposium (EWDTS’2013). Rostov-on-Don, Russia, September 27–30, 2013. Kharkov: KNURE, 2013. P. 137-140.
7. Воловач В.И. Оценка достоверности обнаружения объектов двухканальными радиотехническими устройствами обнаружения турникетного типа // Радиопромышленность. 2013, вып. 3. С. 145-155.
8. Артюшенко В.М., Воловач В.И. Анализ параметров спектра сигнала, отраженного от протяженного объекта // Известия вузов. Приборостроение. 2012, т. 55, № 9. С. 62-67.
9. Артюшенко В.М., Воловач В.И., Иванов В.В. Статистические характеристики сигналов и помех в радиотехнических устройствах ближнего действия // Известия вузов. Приборостроение. 2012, т. 57, № 7. С. 46-50.
10. Артюшенко В. М., Воловач В. И. Экспериментальное исследование параметров спектра доплеровского сигнала, отраженного от протяженного объекта // Прикаспийский журнал: управление и высокие технологии. 2012, № 3 (19). С. 17-24.
11. Артюшенко В.М., Воловач В.И. Анализ математических моделей полезных сигналов и информационных процессов радиолокационных устройств ближнего радиуса действия // Известия вузов России. Радиоэлектроника. 2014, № 5. С. 14-20.
12. Сосулин Ю.Г. Теория обнаружения и оценивания стохастических сигналов. М.: Сов. радио, 1978. 320 с.
13. Справочник по радиолокации / пер. с англ.; под ред. К.Н. Трофимова. Т. 1. М. : Сов. радио, 1976. 476 с.
14. Артюшенко В.М. Исследование и разработка радиолокационного измерителя параметров движения протяженных объектов. М.: ФГБОУ ВПО ФТА, 2013. 214 с.
15. Артюшенко В.М., Воловач В.И. Зависимости плотности распределения вероятностей обнаружения протяженного объекта радиотехническими устройствами ближнего действия // VIII Всероссийская конференция «Радиолокация и радиосвязь», 24-26 ноября 2014 г., Москва, ИРЭ им. В.А. Котельникова РАН. Москва, 2014. С. 184-188.