СРАВНИТЕЛЬНАЯ ОЦЕНКА ПОМЕХОУСТОЙЧИВОСТИ ШУМОВЫХ И ИМПУЛЬСНЫХ РЛС
Р. П. Быстров, В. Е. Кузьмичев, Л. В. Федорова
Институт радиотехники и электроники им. В.А. Котельникова РАН
Статья получена 23 марта 2015 г.
Аннотация. В статье проводится анализ и сравнительная оценка помехозащищенности шумовых и импульсных РЛС. Приводятся и поясняются зависимости требуемой мощности передатчиков импульсных и шумовых РЛС от дальности действия. Делается вывод, что при одинаковых тактико-технических характеристиках скрытность шумовых РЛС с большой базой существенно выше, чем импульсных.
Ключевые слова: Шумовая РЛС, импульсная РЛС, дальность действия, помехозащищенность, скрытность, радиоэлектронное противодействие.
Abstract. In article the analysis and a comparative assessment of noise immunity of noise and pulse RLS is carried out. Dependences of the demanded power of transmitters of pulse and noise RLS on range of action are brought and explained. The conclusion is drawn that at identical tactical technical characteristics the reserve of noise RLS with big base is significantly higher, than pulse.
Keywords: Noise RLS, pulse RLS, range of action, noise immunity, reserve, radio-electronic counteraction.
Система показателей помехозащищенности
Известно, что под помехозащищенностью понимается способность нормально функционировать (сохранять определенный уровень эффективности боевого использования) в условиях радиоэлектронного противодействия (РЭП).
В общем случае помехозащищенность РЛС определяется её помехоустойчивостью, скрытностью работы и допустимым снижением эффективности в условиях воздействия преднамеренных и непреднамеренных помех.
Наиболее полно помехозащищенность РЛС характеризуется вероятностью выполнения своих задач в условиях ведения противником радиоэлектронного противодействия (РЭП), которая определяется следующей формулой [1-3]
![]() (1)
(1)
где Рдп – вероятность воздействия на РЛС специально организованных помех;
Роп и Рo – вероятности успешного решения своих задач РЛС при условии, что на нее наряду с полезным сигналом, воздействуют организованные и естественные или только естественные помехи соответственно.
Вероятность Рдп характеризует скрытность работы РЛС и эффективность системы разведки противника, а Роп и Po являются основными количественными показателями помехоустойчивости РЛС при наличии и отсутствии помех.
Достаточно точное теоретическое исследование работоспособности действующей или вновь разрабатываемой РЛС в условиях РЭП, с помощью приведенной выше формулы часто наталкивается на практически непреодолимые трудности. Это связано с необходимостью анализа сложной ситуации, например, с учетом характера подстилающей поверхности и рельефа местности, а также решения чисто радиотехнических задач прохождения различных, как правило сложных по структуре, сигналов и помех не только через линейные, но и большое количество нелинейных преобразователей как с постоянными, так и переменными во времени параметрами. В связи с этим часто для оценки помехозащищенности РЛС используют частные показатели скрытности и помехоустойчивости, непосредственно или косвенно связанные с основными показателями.
Анализ работ, связанных с методологией оценки эффективности обзорных РЛС, показывает, что наиболее часто в качестве основного показателя помехозащищенности в них используется отношение количества своевременно разведанных целей за определенный период боевых действий в условиях РЭП (Nn) к количеству разведанных целей при отсутствии помех (N):
 .
.
Данные о характере воздействия помех на такие РЛС показывают, что в условиях помех в основном снижаются возможности по обнаружению целей. Влияние помех на точность определения координат целей проявляется в значительно меньшей степени.
В общем случае эффективность работы РЛС в условиях радиоэлектронной борьбы (РЭБ) будет определяться как скрытностью, так и помехоустойчивостью РЛС. Однако учесть одновременно оба этих фактора при оценке W достаточно трудно. Поэтому при оценке помехозащищенности рассматриваемых РЛС предлагается раздельно производить оценку скрытности и помехоустойчивости РЛС.
Для примера, все оценки проведем для обзорных РЛС, объектами разведки которых являются наземные цели с использованием РЛС разведки наземных целей (РНЦ).
При этом в качестве показателя скрытности работы РЛС будем использовать относительную скрытность, численно равную отношению
 , (2)
, (2)
где Rб – минимальное расстояние, между РЛС и станцией РТР, определяемое из тактики применения указанных средств;
Rр – потенциальная дальность разведки излучения РЛС соответствующими средствами РТР.
В качестве показателя помехоустойчивости РЛС будем использовать относительную площадь разведки в условиях воздействия помех Sп/Sз в пределах которой сохраняются заданные в ТТЗ характеристики обнаружения РЛС: где Sn – площадь разведки в условиях помех, Sз – площадь разведки, заданная из тактических соображений.
Данный показатель характеризует снижение потенциальных возможностей РЛС по обнаружению элементарных объектов в заданном секторе при воздействии активных шумовых помех и для случая, когда все цели равномерно распределены по площади в секторе поиска и находятся в зоне видимости, достаточно точно отражает снижение эффективности работы РЛС РНЦ в условиях помех.
Критерии помехозащищенности
Важной задачей при оценке помехозащищенности РЛС является обоснованный выбор критерия оценки, который определяет, при каком значении показателя уровень защиты от РЭП можно считать достаточным.
При оценке скрытности работы РЛС определяется дальность радиотехнической разведки её излучения Rr и расстояний между станцией РТР и РЛС Rб . В качестве критерия скрытности в данном случае является условие, при котором отношение указанных дальностей Rб/Rp равно или больше или равно 1.
При оценке дальности РТР излучения РЛС необходимо учитывать возможности станции РТР вести разведку по главному, ближнему и дальнему боковым лепесткам. В случае если РЛС обладает абсолютной скрытностью, т.е. не разведывается станцией РТР по главному лепестку ДНА РЛС, то оценку помехоустойчивости такой РЛС проводить нецелесообразно.
Более сложно определить нормированные значения для показателя Sn/Sз, Это обусловлено тем, что взаимосвязь данного показателя с эффективностью работы РЛС неоднозначна, так как в общем случае снижение эффективности работы РЛС может быть непропорционально снижению площади разведки из-за неравномерного распределения целей и распределения зон видимости по площади.
Однако
в силу того, что все оценки сравнительные и проводятся применительно к обычным
РЛС и РЛС с шумовыми широкополосными сигналами, работающими в одинаковых
условиях, можно сформулировать следующие количественные критерии, позволяющие
вынести заключение о помехозащищенности РЛС РНЦ. Критерии формулируются как ![]() или
или

Алгоритмы оценки помехозащищенности РЛС
При оценке показателя скрытности в соответствии с типом оцениваемого образца первоначально определяются типы средств радиотехнической разведки (РТР), которые могут вести разведку данной РЛС и определяются минимально возможные расстояния между РЛС и станцией РТР Rб,
![]() ,
,
где RРТР – минимальное удаление станции РТР i-го типа от ЛСВ;
RРЛС – минимальное удаление РЛС от ЛСВ.
Дальность радиотехнической разведки излучения РЛС при известных характеристиках станции РТР при отсутствии помех можно определить, воспользовавшись формулой
 (3)
(3)
где Ри – мощность передатчика РЛС;
GРЛС(a,e) – коэффициент усиления антенны РЛС в направлении на станцию РТР;
ВРТР – параметр станции РТР;
gр – множителъ потерь мощности сигнала РЛС при распространении от РЛС до станции РТР;
hРЛС – множитель потерь мощности на передачу в РЛС;
DfРТР – полоса пропускания приемника РТР;
DfРЛС – ширина спектра зондирующего сигнала.
Параметр станции РТР определяется выражением
 (4)
(4)
где GРТР – коэффициент усиления антенны станции РТР в направлении на РЛС;
l – длина волны сигнала РЛС;
hРТР – коэффициент потерь мощности сигнала в приемнике РТР;
gп – коэффициент поляризационных потерь;
qРТР – коэффициент различимости в приемнике РТР;
РшРТР – мощность шумов приемника РТР;
Рэкв – эквивалентная чувствительность приемника РТР.
 (5)
(5)
Данное уравнение трансцендентное и решается графоаналитическим путем. Решение уравнения определяется точкой пересечения двух графиков:
![]()
 (6)
(6)
Показатель скрытности РЛС определяется как отношение Rб/Rр [4-6].
Таким образом, для оценки показателя скрытности РЛС необходимы следующие исходные данные: Rб – минимально возможное расстояние между станцией РТР и РЛС; Ри – мощность излучения РЛС; GРЛС (a,e )– коэффициент усиления антенны РЛС; gр и hРЛС – множители потерь мощности сигнала при распространении и на передачу; DfРТР и DfРЛС – полоса пропускания приемника РТР и ширина спектра зондирующего сигнала РЛС; Рэкв – эквивалентная чувствительность приемника станции РТР.
Расчет показателя относительной площади разведки в условиях воздействия помех.
При расчете относительной площади разведки в условиях помех воспользуемся общепринятой аппроксимацией, согласно которой ДНА разбивается на области главного, ближнего и дальних боковых лепестков. Далее зададимся условием, что область ближних боковых лепестков равна ±5DQ (где – DQ ширина ДНА по уровню мощности 0,5); область главного лепестка равна DQ.
Будем полагать, что ДНА симметрична относительно своего максимального значения, а в приемнике РЛС осуществляется стабилизация уровня ложных тревог за счет адаптации порогового уровня к уровню сигнала помехи.
Тогда площади разведки, в пределах которой обеспечиваются заданные в ТТЗ характеристики обнаружения в условиях отсутствия (Smax) и наличия (Sn) помех будут равны:
 (7)
(7)
где Rmax и Rmin- максимальная и минимальная дальности действия РЛС; Rр1, Rр2 и Rр3 – дальности действия РЛС при воздействии помехи соответственно по главному, ближнему и дальним боковым лепесткам; n – целая часть отношения ширины сектора разведки и DQ .
Отношение Sп/Smax можно записать в виде:

Если РЛС имеет дальность действия Rmax больше заданного в ТТЗ значения Rз, то в качестве показателя помехоустойчивости необходимо использовать отношение Sп/Sз, где
 (8)
(8)
Чтобы получить выражение для вычисления отношения Sп/Sз умножим числитель и знаменатель левой части выражения (8) на множитель Sз. Тогда получим
 (9)
(9)
Здесь
Подставив в выражение (8) зависимость Smax/Sз и произведя ряд алгебраических преобразований, выражение для Sр можно записать
 ,
(10)
,
(10)
где
k1=1, k2=10, k3=(n-12).
Следует учитывать, что при Rpi £Rmin Mi=0.
Для расчета показателя Sр необходимо определить значения Rpi. Указанные дальности можно получить, если определить значения Rpi/Rmax.
Отношение Rpi/Rmax характеризует относительное снижение дальности действия РЛС в условиях помех. Воспользовавшись уравнением радиолокации,можно показать, что в нашем случае это отношение:
 ,
(11)
,
(11)
где Pp и PшРЛС – мощности помехи и внутренних шумов на входе приемника РЛС;
kдоп – суммарный коэффициент подавления помехи дополнительными средствами;
Gi – относительный коэффициент усиления антенны в направлении постановщика помех;
ggl и gpi – множители затухания зондирующего сигнала при распространении на максимальную дальность при воздействии и отсутствии помех;
![]() ,
,![]() , dz – коэффициент затухания при распространении.
, dz – коэффициент затухания при распространении.
Данное уравнение трансцендентно и решается графоаналитическим способом. Произведя алгебраические преобразования, получим
![]() и
и

Значение Rpi соответствует точке пересечения графиков y1(Rpi) и y1(Rpi). Мощность помехи на входе приемника рассчитывается по формуле:
 (12)
(12)
где В – спектральная плотность потока мощности помехи в раскрыве антенны;
DfРЛС – входная полоса пропускания приемника РЛС;
l – рабочая длина волны РЛС.
Таким образом, для оценки показателя относительной площади разведки в условиях помех необходимы следующие исходные данные: В – спектральная плотность потока мощности помехи у раскрыва антенны; DfРЛС – входная полоса пропускания приемника РЛС; l – рабочая длина волны РЛС; GРЛС – максимальный коэффициент усиления антенны РЛС; DQ – ширина ДНА РЛС в азимутальной плоскости по уровню 0,5; W – сектор поиска; Rmax, Rmin, Rз – потенциальная (максимальная), минимальная и заданная в ТЗ дальности действия РЛС; G1, G2, G3 – средние значения коэффициента усиления антенны РЛС главного, ближнего и дальних боковых лепестков в пределах сектора поиска; dz – погонное затухание зондирующего сигнала дБ/км; PшРЛС – мощность шума приемника РЛС, приведенная к его входу.
В соответствии с изложенными методиками были проведены расчеты показателей скрытности и помехоустойчивости для обычных импульсных РЛС с когерентным накоплением и шумовых РЛС с широкополосным зондирующим сигналом одинаковой дальности действия. Диапазон дальности действия РЛС Rmax принимался равным от 1 до 20 км. Выбор указанного диапазона дальностей обусловлен тем, что он включает в себя практически все радиолокационные системы ближнего действия (активные головки самонаведения, противотанковые и танковые системы) и РЛС разведки наземных целей ближней и малой дальности действия.
Предварительно были рассчитаны требуемые мощности передатчиков РЛС. При этом для расчета импульсной мощности передатчика использовалась формула
 (13)
(13)
где Рши – мощность шумов приемника, приведенная ко входу;
кр – коэффициент различимости (минимальное отношение сигнал /шум при котором обеспечивается заданная вероятность обнаружения);
sс = 10 м – эффективная поверхность рассеяния цели;
dз = 0,03 дБ/км;
l = 2 см;
lп = 0,2 – коэффициент потерь на прием и передачу;
![]() – число когерентно накапливаемых
импульсов в зависимости от дальности
– число когерентно накапливаемых
импульсов в зависимости от дальности
![]() (14)
(14)
Расчет средней мощности передатчика шумовой РЛС проводился по этой же формуле, где вместо числа импульсов вводилось значение базы сигнала, численно равной произведению времени анализа сигнала Та = 10 мс и ширины спектра зондирующего сигнала DfРЛС = 300 МГц. Кроме того, если в первом случае коэффициент различимости определялся применительно к флюктуирующему сигналу, то применительно к шумовой РЛС – применительно к нефлюктуирующему сигналу. Указанные отличия вызваны тем, что разрешающая способность по дальности импульсных РЛС принималась равной 50 м (что больше большинства габаритных размеров большинства наземных целей), а шумовых – 1 м.
Расчет проводился для периода ложной тревоги РЛС, равного Тлт = 900 с и вероятности обнаружения – не менее 0,8. При этом учитывалась разница в количестве дальномерных каналов рассматриваемых РЛС. Вероятность ложной тревоги в каждом дальномерном канале рассчитывалась по формуле
![]() ,
,
где ![]() – число каналов по
дальности с максимальным усилением приемного тракта (при фиксированном
пороге) или с минимальным порогом (при фиксированном коэффициенте
усиления приемного тракта РЛС); DR – разрешающая
способность РЛС по дальности.
– число каналов по
дальности с максимальным усилением приемного тракта (при фиксированном
пороге) или с минимальным порогом (при фиксированном коэффициенте
усиления приемного тракта РЛС); DR – разрешающая
способность РЛС по дальности.
Требуемые коэффициенты различимости определялись на основе выражений для расчета вероятностей обнаружения для случаев нефлюктуирующей
 (15)
(15)
и флуктуирующей цели
![]() .
(16)
.
(16)
Другие параметры, необходимые для расчетов принимались равными: NШ = 5 – коэффициент шума приемника; Т=300оК – шумовая температура антенны; k=1,38∙10-23 – постоянная Больцмана

Рис.1. Зависимость требуемой мощности передатчиков импульсных и шумовых РЛС от дальности действия
Результаты расчета требуемой мощности передатчика для рассматриваемых РЛС в зависимости от дальности действия приведены на рис. 1
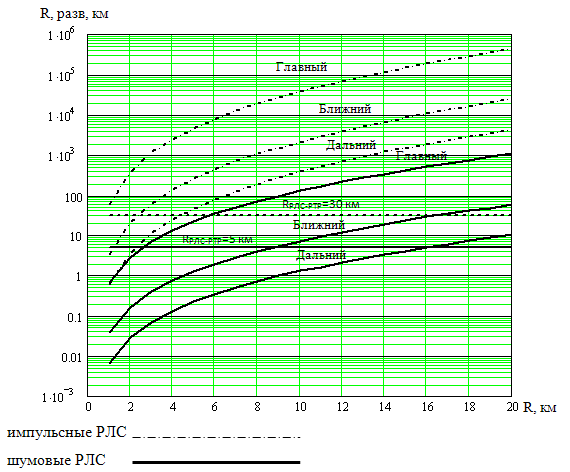
Рис.2. Зависимость дальности
разведки РЛС средствами РТР
от дальности действия РЛС
На рис.2 представлены зависимости дальности разведки РЛС средствами РТР в зависимости от дальности действия РЛС при их разведке по главному, ближним и дальним боковым лепесткам диаграммы направленности антенны РЛС.
Из рис.2 видно, что средняя мощность импульсных РЛС примерно в 6 раз или на 7 дБ больше, чем средняя мощность шумовых РЛС, что обусловлено в первую очередь требуемыми значениями коэффициента различимости при обнаружении флуктуирующего и нефлуктуирующего сигналов.
Из рис.2, также следует, что при одинаковых дальности действия, секторе поиска и скорости сканирования дальность разведки импульсных РЛС средствами РТР существенно больше, чем шумовых РЛС. Так, в нашем случае, импульсная РЛС с дальностью действия 5 км обнаруживается средствами РТР, удаленными от нее на 30 км даже по дальним боковым лепесткам. Средства РТР, расположенные на удалении 5 км от РЛС, способны обнаруживать по дальним боковым лепесткам импульсные РЛС с дальностью действия 2 км.
При удалении на 30 км от ШРЛС, средства РТР обнаруживают их по главному лепестку, если дальность действия последних превышает 6 км, по ближним – если дальность действия превышает 16 км и по дальним – если дальность действия больше 25 км. При удалении средств РТР на 5 км от ШРЛС, аналогичные значения соответственно составляют 2,8; 8,3 и 16 км.
Следует отметить, что для определения координат позиции РЛС необходимо обнаружить ее сигнал и идентифицировать его как минимум хотя бы с двух направлений. При этом, для идентификации сигнала РЛС после его обнаружения или одновременно определяют параметры сигнала (длину волны, частоту повторения, длительность импульса или ширину его спектра). При обнаружении импульсных РЛС у средств РТР проблем не возникает.
Что же касается шумовых РЛС, то при их обнаружении по главному или ближним боковым лепесткам, реализации принятых каждым из постов РТР сигналов будут некоррелированны между собой, что практически исключает возможность их идентификации на фоне шумов приемника РТР даже в дуэльной ситуации.
Для примера в табл. 1 приведены значения показателя скрытности для импульсной и шумовой РЛС с дальностью действия 15 км.
Из табл. 1 видно, что при удалении средств РТР от РЛС на 5…30 км ШРЛС не обнаруживается ими по дальним лепесткам ДНА. Импульсная РЛС обнаруживается указанными средствами РТР во всех случаях [4-8].
Таким образом, из изложенного следует, что при одинаковых тактико-технических характеристиках скрытность шумовых РЛС с большой базой существенно выше, чем импульсных.
Таблица 1. Значения показателя скрытности импульсной и шумовой РЛС
|
|
Значения показателя скрытности |
|||
|
Шумовая РЛС |
Импульсная РЛС |
|||
|
RРЛС-РТР=5км |
RРЛС-РТР=30км |
RРЛС-РТР=5км |
RРЛС-РТР=30км |
|
|
Главный лепесток |
0,012 |
0,072 |
3,4∙10-5 |
2,02∙10-4 |
|
Ближний лепесток |
0,215 |
1,287 |
6∙10-4 |
3,6∙10-3 |
|
Дальний лепесток |
1,206 |
7,238 |
3,4∙10-3 |
0,02 |
Для сравнения помехоустойчивости рассматриваемых РЛС были рассчитаны относительные площади разведки двух РЛС с дальностью действия 15 км – импульсной и шумовой, при воздействии активных помех с одинаковой мощностью на входе. При этом предполагалось, что станция помех находится в центре сектора разведки на удалении 30 км от РЛС.
При расчете принималось, что энергетический потенциал станции помех равен 105 Вт, коэффициент усиления антенны станции помех – 1000.
Полученные значения относительной площади разведки составили:
для импульсной РЛС – 0,168
для шумовой РЛС – 0,589.
Из полученного результата видно, что по эффективности работы в условиях помех шумовая РЛС примерно в 3,5 раза превосходит импульсную РЛС.
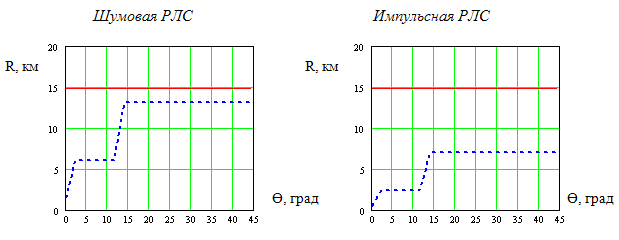
Рис.3. Зависимость дальности действия РЛС от угла ДНА на станцию помех в градусах
Для наглядности на рис. 3 приведены графики зависимости дальности действия рассматриваемых РЛС в зависимости от угла отклонения ДНА РЛС от направления на станцию помех.
Проведенная оценка скрытности и помехоустойчивости импульсных и шумовых РЛС при одинаковых дальности разведки, секторе разведки и скорости сканирования ДНА по показателям "относительная скрытность" и относительная площадь разведки", показала следующее.
1. В условиях воздействия активных помех с энергетическим потенциалом 105 Вт по показателю "относительная площадь разведки" шумовая РЛС в 3,5 раза превосходит импульсную.
2. Широкополосные РЛС с шумовыми и шумоподобными сигналами с большой базой обладают существенными преимуществами перед обычными импульсными РЛС по скрытности работы и помехоустойчивости, что указывает на целесообразность их использования для решения задач различного, в том числе и оборонного назначения.
Таким образом, скрытность шумовых РЛС существенно превышает скрытность импульсных. Шумовая РЛС с дальностью действия 15 км не обнаруживается средствами РТР, удаленными от нее на 5…30 км по дальним боковым лепесткам. Импульсная РЛС с такой же дальностью действия обнаруживается средствами РТР во всех случаях.
Литература
1. Фадеев A.M. Шумовые радиолокационные системы, (Обзор), "Зарубежная радиоэлектроника", 1968, № 4.
2. Волжин А.Н., Кузьмичев В.Е., Кислов В.Я. и др. Способ радиолокации со спектральной обработкой сигналов. Авторское свидетельство № 792183 от 1.9.80.
3. Быстров Р.П., Дмитриев В.Г., Потапов А.А., Соколов А.В. Проблемы радиолокационного обнаружения малоконтрастных объектов. / Вопросы перспективной радиолокации. Коллективная монография. Под ред. А.В. Соколова. – М.: Радиотехника, 2003. – 512 с.
4. Кузьмичев В.Е., Хачевский В.А. Шумовые РЛС со спектральной обработкой сигналов гребенчатыми фильтрами. / XII Международная конференция по спиновой электронике и гировекторной электродинамике. 19-21 декабря 2003 г., Москва (Фирсановка), - с.521-522.
5. Чапурский В. В. Широкополосные и сверхширокополосные сигналы и системы. // - М.: Сборник статей, Изд-во МГТУ им. Н. Э. Баумана, 2012. - С. 114-122.
6. Быстров Р.П., Кузьмичев В.Е. Радиолокационное обнаружение объектов шумоподобными сигналами с большой базой. Коллективная монография. «Обнаружение и распознавание объектов радиолокации» /Под ред.А.В. Соколова. // –М.: «Радиотехника», 2007. – 175 с.
7. Быстров Р.П., Кузьмичев В.Е., Соколов А.В. Характеристики обнаружения шумовых РЛС. // Труды XV Международной конференции по спиновой электронике и гировекторной электродинамике, 2007. – с. 104-106.
8. Ксендзюкдзук А. В. Использование шумоподобных сигналов в радиолокационных системах дистанционного зондирования, «Электромагнитные волны и электронные системы». № 9-10 2004 г. – с. 11-18.