|
|
"ЖУРНАЛ РАДИОЭЛЕКТРОНИКИ" N 12, 2002 |
|
ОПРЕДЕЛЕНИЕ ИОНОСФЕРНОЙ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ ПСЕВДОДАЛЬНОСТЕЙ В ОДНОЧАСТОТНОЙ АППАРАТУРЕ СИСТЕМ ГЛОНАСС И GPS
М.Ю. Казанцев, Ю.Л. Фатеев
Красноярский государственный технический университет
Получена 15 декабря 2002 г.
В статье представлен метод, позволяющий определить ионосферную погрешность измерения псевдодальностей в одночастотной навигационной аппаратуре потребителей систем ГЛОНАСС и GPS. Задержка сигнала в ионосфере определяется по разности приращений псевдодальностей измеренных по дальномерному коду и по фазе несущей частоты. Приведены результаты экспериментальных исследований при различных геомагнитных условиях (возмущенная и спокойная ионосфера). Сравнение с данными, полученными с помощью двухчастотной аппаратуры, продемонстрировало достаточную точность разработанного метода и его устойчивость к широкому диапазону изменений состояния ионосферы. Разработанный метод позволил в три раза уменьшить погрешность измерения псевдодальностей в одночастотных навигационных приемниках систем ГЛОНАСС и GPS, вызванную влиянием ионосферы, по сравнению с существующей методикой (модель Клобухара).
Навигационная аппаратура потребителей (НАП) глобальных спутниковых навигационных систем (ГНСС) применяется при создании современных систем навигации и ориентации. Это обусловлено, в первую очередь, такой их характеристикой, как возможность определения с высокой точностью координат, скорости и ориентации объекта, расположенного в любой точке земного шара.
Одной из основных проблем при использовании НАП ГНСС является подверженность сигналов навигационных космических аппаратов (НКА) ГНСС влиянию окружающей среды и помех. Заметное влияние на точность навигационных определений по сигналам систем ГЛОНАСС и GPS оказывают условия прохождения сигнала от НКА до НАП ГНСС. Как показывают исследования [1,2], наибольшее влияние на погрешность измерения псевдодальностей по сигналам систем ГЛОНАСС и GPS оказывает ионосфера.
Дальность при радиотехнических измерениях характеризуется временем распространения сигнала от объекта измерения (НКА) до измерительного пункта (НАП) [3]. При беззапростных измерениях в ГНСС прямое измерение дальности возможно только при строгой синхронности шкал времени на НКА и НАП ГНСС. Псевдодальностью называют величину [3]
![]() ,
,
где ![]() - скорость
распространения радиоволн;
- скорость
распространения радиоволн; ![]() - интервал между моментом излучения
сигнала, определяемым по системному времени ГНСС, и моментом его приема по
шкале времени НАП. Псевдодальность
- интервал между моментом излучения
сигнала, определяемым по системному времени ГНСС, и моментом его приема по
шкале времени НАП. Псевдодальность ![]() отличается от истинной дальности
отличается от истинной дальности ![]() на величину
на величину
![]() ,
,
где ![]() - расхождение шкал
времени ГНСС и НАП на момент отсчета. При обработке сигналов ГНСС различают
псевдодальность, измеренную по дальномерному коду и псевдодальность, измеренную
по фазе несущей частоты сигнала.
- расхождение шкал
времени ГНСС и НАП на момент отсчета. При обработке сигналов ГНСС различают
псевдодальность, измеренную по дальномерному коду и псевдодальность, измеренную
по фазе несущей частоты сигнала.
Погрешность измерения псевдодальностей, измеренных по дальномерному коду и фазе несущей частоты сигнала, выражается через соответственно групповую и фазовую задержки сигналов. Систематические погрешности измерения псевдодальности до НКА по дальномерному коду и по фазе несущей частоты сигнала, вызванные влиянием ионосферы, равны по величине, но имеют разный знак [3, 4].
Величина запаздывания сигналов в ионосфере, зависит от периода 11-летнего цикла солнечной активности, сезонных и ежедневных вариаций электронной концентрации в ионосфере, угла места и азимута НКА, а так же от широты и долготы расположения НАП ГНСС. Величина погрешности измерения псевдодальности, обусловленная задержкой сигнала в ионосфере, может лежать в пределах от 0.15 до 50 метров [4].
Величина фазового и группового запаздывания сигналов обусловлены влиянием ионосферы, их величина непосредственно связана с интегральной электронной концентрацией в ионосфере вдоль пути сигналов в ионосфере [4]
 ,
,
где ![]() - групповое
запаздывание, выраженное в метрах;
- групповое
запаздывание, выраженное в метрах; ![]() - фазовая задержка, выраженная в метрах;
- фазовая задержка, выраженная в метрах; ![]() - частота в герцах;
- частота в герцах; ![]() - распределение
электронной концентрации вдоль пути
- распределение
электронной концентрации вдоль пути ![]() сигнала в ионосфере;
сигнала в ионосфере; ![]() - интегральная электронная
концентрация вдоль пути сигнала в ионосфере.
- интегральная электронная
концентрация вдоль пути сигнала в ионосфере.
НКА систем ГЛОНАСС и GPS передают навигационные сигналы в двух частотных поддиапазонах L1 и L2. Двухчастотная НАП, работающая по сигналам двух частотных поддиапазонов L1 и L2, способна исключать влияние ионосферной погрешности измерений псевдодальности. Многочисленные пользователи одночастотной аппаратуры систем ГЛОНАСС и GPS лишены такой возможности.
В навигационном сообщении системы GPS передаются параметры глобальной модели ионосферы – модели Клобухара (Klobuchar model), на основе которой, одночастотный потребитель может осуществлять ионосферную коррекцию. Согласно интерфейсному контрольному документу GPS [5], применение модели Клобухара позволяет уменьшить, как минимум, на 50% влияние ионосферы на среднеквадратическую ошибку определения положения НАП ГНСС, что является недостаточным. Среднеквадратическая погрешность модели Клобухара составляет 7 м [6]. В системе ГЛОНАСС пока отсутствует какая-либо возможность коррекции влияния ионосферы для одночастотного потребителя.
Среднеквадратическая погрешность большинства эмпирических моделей ионосферных параметров, например, International Reference Ionosphere (IRI), довольна высока (32.5%), при этом они способны работать, только в среднеширотных областях и спокойных геомагнитных условиях [7]. Поэтому для эффективного устранения влияния ионосферы необходимо прямое измерение задержки сигнала или интегральной электронной концентрации.
Компенсация ионосферной погрешности измерения псевдодальности в одночастотной аппаратуре возможна при использовании определенных свойств ионосферы. Наиболее перспективным является метод компенсации влияния ионосферы на сигналы НКА в одночастотной НАП ГНСС, основанный на учете противоположности знаков фазовой и групповой задержек. Данный подход позволяет определить задержку сигнала в ионосфере с помощью одночастотной НАП, по разности между псевдодальностями измеренными по дальномерному коду и по фазе несущей частоты сигнала [8,9]. Разность псевдодальностей измеренных по задержке дальномерного кода и по фазе несущей частоты равна удвоенной ионосферной задержке сигнала, и может быть использована для ее определения
![]() ,
,
где ![]() - задержка сигнала НКА
в ионосфере в
- задержка сигнала НКА
в ионосфере в ![]() -й
момент времени (
-й
момент времени (![]() );
);
![]() -
псевдодальность, измеренная по дальномерному коду;
-
псевдодальность, измеренная по дальномерному коду; ![]() - псевдодальность, измеренная по
фазе несущей частоты сигнала;
- псевдодальность, измеренная по
фазе несущей частоты сигнала; ![]() - начальная неоднозначность измерений фазы
несущей частоты сигнала;
- начальная неоднозначность измерений фазы
несущей частоты сигнала; ![]() - длина волны сигнала НКА;
- длина волны сигнала НКА; ![]() - порядковый номер
НКА,
- порядковый номер
НКА, ![]() ;
; ![]() - число наблюдаемых
НКА.
- число наблюдаемых
НКА.
Рассматриваемый подход получил
свое развитие в начале 90-х годов в работах К. Коена, Б. Первана, Б. Паркинсона
и др. Основным препятствием на пути реализации рассматриваемого метода
компенсации ионосферных погрешностей является проблема разрешения начальной
неоднозначности фазовых измерений ![]() на несущей частоте при отсутствии
дополнительных измерительных частот [8,9]. Поэтому сначала оценивают
вертикальную задержку сигнала в ионосфере и начальные фазовые неоднозначности в
фильтре Калмана, затем вертикальную задержку пересчитывают для каждого НКА с
учетом его угла места [9]. Для пересчета вертикальной задержки сигнала в
наклонную применяется модель ионосферы, которая выражает зависимость задержки
сигнала в ионосфере от угла места, а так же ее пространственный градиент. При
таком способе оценки начальной фазовой неоднозначности возникает ряд проблем
вычислительного характера, связанных с большой и меняющейся размерностью
вектора состояния фильтра Калмана.
на несущей частоте при отсутствии
дополнительных измерительных частот [8,9]. Поэтому сначала оценивают
вертикальную задержку сигнала в ионосфере и начальные фазовые неоднозначности в
фильтре Калмана, затем вертикальную задержку пересчитывают для каждого НКА с
учетом его угла места [9]. Для пересчета вертикальной задержки сигнала в
наклонную применяется модель ионосферы, которая выражает зависимость задержки
сигнала в ионосфере от угла места, а так же ее пространственный градиент. При
таком способе оценки начальной фазовой неоднозначности возникает ряд проблем
вычислительного характера, связанных с большой и меняющейся размерностью
вектора состояния фильтра Калмана.
Рис. 1.
В предлагаемом методе выбор
модели ионосферы для пересчета вертикальной задержки сигнала в ионосфере в
наклонную продиктован следующими особенностями поставленной задачи. Высота
рабочих орбит НКА систем ГЛОНАСС и GPS находится выше верхней границы
ионосферы. Как правило, большинство потребителей находится под нижней границей
ионосферы. Вертикальный профиль электронной концентрации имеет существенное
значение лишь для объектов, находящихся в ионосферном слое. Поэтому для учета
ионосферных погрешностей существенной является вся ионосфера. Для воздушных и
наземных объектов ионосферная поправка практически полностью определяется
значением интегральной концентрацией электронов в вертикальном столбе. Поэтому
за основу возьмем, однослойную модель ионосферы, где предполагается, что все
электроны сосредоточены в тонком слое, расположенном на некоторой высоте ![]() над поверхностью Земли
[10, 11, 12]. Под высотой слоя ионосферы
над поверхностью Земли
[10, 11, 12]. Под высотой слоя ионосферы ![]() обычно понимают высоту, где достигается
50% интегральной концентрации электронов в вертикальном столбе [12]. Также
предполагается, что интегральная концентрация электронов в вертикальном столбе
(или вертикальная задержка сигнала) одинакова во всей области пересечения
сигналов НКА слоя ионосферы.
обычно понимают высоту, где достигается
50% интегральной концентрации электронов в вертикальном столбе [12]. Также
предполагается, что интегральная концентрация электронов в вертикальном столбе
(или вертикальная задержка сигнала) одинакова во всей области пересечения
сигналов НКА слоя ионосферы.
Величина погрешности, вызванная
влиянием ионосферы будет зависеть от протяженности пути ![]() сигнала НКА в ионосфере. Для НКА
с низкими углами места протяженность пути сигнала будет больше, чем для НКА с
высокими углами места. Поэтому ионосферная погрешность будет зависеть от угла
места НКА. Различают вертикальную задержку (угол места НКА
сигнала НКА в ионосфере. Для НКА
с низкими углами места протяженность пути сигнала будет больше, чем для НКА с
высокими углами места. Поэтому ионосферная погрешность будет зависеть от угла
места НКА. Различают вертикальную задержку (угол места НКА ![]() ) и наклонную задержку (угол
места НКА
) и наклонную задержку (угол
места НКА ![]() ).
Их взаимосвязь определяется следующим выражением [9, 11]
).
Их взаимосвязь определяется следующим выражением [9, 11]
где ![]() - задержка (наклонная)
сигнала НКА в ионосфере;
- задержка (наклонная)
сигнала НКА в ионосфере; ![]() - отображающая функция;
- отображающая функция; ![]() - вертикальная задержка
сигнала в ионосфере;
- вертикальная задержка
сигнала в ионосфере; ![]() -
угол места НКА. Отображающая функция предназначена для пересчета вертикальной
задержки в наклонную и определяется как отношение наклонной и вертикальной
задержек сигнала в ионосфере [10]
-
угол места НКА. Отображающая функция предназначена для пересчета вертикальной
задержки в наклонную и определяется как отношение наклонной и вертикальной
задержек сигнала в ионосфере [10]
 ,
(2)
,
(2)где ![]() - радиус Земли;
- радиус Земли; ![]() - высота слоя
ионосферы.
- высота слоя
ионосферы.
В зависимости от угла места и
высоты слоя ионосферы, значение функции ![]() будет варьироваться примерно диапазоне от
3.5 до 1 (рис. 2).
будет варьироваться примерно диапазоне от
3.5 до 1 (рис. 2).
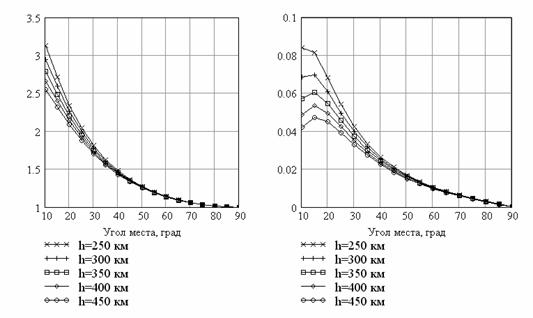
а) б)
Рис.
2. Свойства отображающей функции: а) значение отображающей функции ![]() в зависимости от угла
места НКА
в зависимости от угла
места НКА ![]() высоты
слоя ионосферы
высоты
слоя ионосферы ![]() ;
б) приращение отображающей функции при увеличении угла места на 1 градус.
;
б) приращение отображающей функции при увеличении угла места на 1 градус.
Запишем исходные уравнения для определения задержки сигнала в ионосфере, при этом псевдодальность, измеренная по дальномерному коду определяется выражением [4]
где ![]() - расстояние от антенны
НАП до НКА;
- расстояние от антенны
НАП до НКА; ![]() -
задержка сигнала НКА в тропосфере;
-
задержка сигнала НКА в тропосфере; ![]() - расхождение шкалы времени НАП ГНСС со
шкалой ГНСС;
- расхождение шкалы времени НАП ГНСС со
шкалой ГНСС; ![]() -
скорость распространения радиоволн;
-
скорость распространения радиоволн; ![]() - часть систематической погрешности, в
состав которой входят погрешности определения эфемерид НКА, уход часов НКА, задержка
в радиотракте НАП и т.д.;
- часть систематической погрешности, в
состав которой входят погрешности определения эфемерид НКА, уход часов НКА, задержка
в радиотракте НАП и т.д.; ![]() - случайная погрешность. Псевдодальность,
измеренная по фазе несущей частоты сигнала определяется выражением [4]
- случайная погрешность. Псевдодальность,
измеренная по фазе несущей частоты сигнала определяется выражением [4]
где ![]() - случайная
погрешность.
- случайная
погрешность.
Алгоритм разбивается на два этапа. Сначала оценивается вертикальная задержка сигнала, а затем она пересчитывается для каждого НКА, с учетом его угла места. Запишем уравнения (4), (5), с учетом (1), в следующем виде
Составим разностную систему
уравнений, вычитая из каждого уравнения системы (5) и (6) в момент времени ![]() для
для ![]() -го НКА соответствующее уравнение
для момента времени
-го НКА соответствующее уравнение
для момента времени ![]() .
Определим приращения псевдодальностей
.
Определим приращения псевдодальностей
![]() ,
,
![]() ,
,
где ![]() - приращение
псевдодальности, измеренной по дальномерному коду;
- приращение
псевдодальности, измеренной по дальномерному коду; ![]() - приращение псевдодальности, измеренной
по фазе несущей частоты;
- приращение псевдодальности, измеренной
по фазе несущей частоты; ![]() - порядковый номер НКА, который наблюдался
в моменты времени
- порядковый номер НКА, который наблюдался
в моменты времени ![]() и
и
![]() ,
, ![]() ;
; ![]() - число НКА, которые наблюдались
в моменты времени
- число НКА, которые наблюдались
в моменты времени ![]() и
и
![]() . Затем
определим разность приращений псевдодальностей, измеренных по дальномерному
коду и по фазе несущей частоты
. Затем
определим разность приращений псевдодальностей, измеренных по дальномерному
коду и по фазе несущей частоты
где ![]() - случайная
погрешность. В итоге мы получили систему уравнений (7), где отсутствует
начальные фазовые неоднозначности
- случайная
погрешность. В итоге мы получили систему уравнений (7), где отсутствует
начальные фазовые неоднозначности ![]() . С помощью уравнений (7) определяется
вертикальная задержка сигнала в ионосфере. Оценка вертикальной задержки
производится с помощью фильтра Калмана. Затем полученная вертикальная задержка
преобразуется в задержку сигнала для
. С помощью уравнений (7) определяется
вертикальная задержка сигнала в ионосфере. Оценка вертикальной задержки
производится с помощью фильтра Калмана. Затем полученная вертикальная задержка
преобразуется в задержку сигнала для ![]() -го НКА в соответствии с выражениями (1) и
(2).
-го НКА в соответствии с выражениями (1) и
(2).
Полученные уравнения обладают
рядом отличительных особенностей. В качестве измерений выступают не разности
псевдодальностей, а разности приращений псевдодальностей. В результате исчезает
необходимость в раскрытии начальных фазовых неоднозначностей, при этом
уменьшается число неизвестных переменных (начальные фазовые неоднозначности для
каждого НКА), которые необходимо оценивать, по сравнению с методом описанным в
работе [9], что значительно упрощает алгоритм. Из системы уравнений можно найти
значение вертикальной задержки для ![]() -го НКА
-го НКА
 .
(8)
.
(8)
Из выражения (8) и свойств
отображающей функции (рис.1) следует, что оценка величины вертикальной задержки
будет зависеть от выбранной высоты слоя ионосферы ![]() . Высота слоя ионосферы может быть задана
априори. Выбор оптимальной высоты ионосферы для отображающей функции
рассматривался в работе [10]. Опираясь на приведенные результаты исследований,
приведенные в данной работе, было выбрано значение высоты слоя ионосферы
. Высота слоя ионосферы может быть задана
априори. Выбор оптимальной высоты ионосферы для отображающей функции
рассматривался в работе [10]. Опираясь на приведенные результаты исследований,
приведенные в данной работе, было выбрано значение высоты слоя ионосферы ![]() км.
км.
Завершающим этапом исследований явилась экспериментальная проверка разработанного метода, с помощью НАП, разработанной в НИИ Радиотехники Красноярского Государственного Технического Университета (НИИРТ КГТУ). Данная аппаратура работает по сигналам ГЛОНАСС и GPS на частоте поддиапазона L1.
|
Дата проведения эксперимента |
Продолжительность, ч |
Ap-индекс, нТ |
СКП одночастотного метода
|
СКП модели Клобухара
|
|
|
25 апреля |
26 |
6 |
0.45930220 |
2.16281361 |
4.7089119 |
|
26 апреля |
6 |
||||
|
28 апреля |
29 |
40 |
0.86405742 |
2.02093429 |
2.3388889 |
|
29 апреля |
13 |
||||
|
16 мая |
46 |
7 |
0.3878384 |
1.23400857 |
3.1817600 |
|
17 мая |
6 |
||||
|
18 мая |
8 |
||||
|
8 октября |
24 |
16 |
1.08973087 |
2.24708779 |
2.0620576 |
|
9 октября |
18 |
||||
|
Усредненное значение по всем экспериментам |
0.69675343 |
1.76357926 |
2.7712769 |
||
В ходе эксперимента, производилась запись результатов измерений радионавигационных параметров и навигационного сообщения систем ГЛОНАСС и GPS, сделанных с помощью НАП. Затем, на основе записанной информации, определялась задержка сигналов НКА в ионосфере. В течении 2001 года было проведено несколько измерительных компаний (см. таблицу) при различных геомагнитных условиях (возмущенная и спокойная ионосфера). В таблице для характеристики геомагнитной активности приведен Ap-индекс.
Для проверки точности разработанного метода привлекалась информация о вертикальной интегральной электронной концентрации, полученной на основе двухчастотных измерений, международной службы International GPS Service (IGS). В настоящее время IGS проводит постоянный мониторинг состояния ионосферы. IGS представляет из себя сеть станций наблюдения, оснащенных двухчастотными навигационными приемниками. По данным IGS составляются карты пространственно-временного изменения интегральной электронной концентрации в вертикальном столбе ионосферы [12]. Эта информация в формате IONEX [13] доступна в сети Интернет. Соответствие информации о состоянии ионосферы для г. Красноярска определяется тем, что в КГТУ расположена одна из станций IGS, оснащенная двухчастотной НАП, что позволяет принять данные IGS в качестве эталонных измерений.
В течение 2001 года была
проведена серия экспериментов при различных геомагнитных условиях (возмущенная
и спокойная ионосфера). В таблице 1 приведены дата проведения эксперимента, его
продолжительность, геомагнитные условия, выраженные через Ap-индекс,
среднеквадратические погрешности разработанного одночастотного метода ![]() и модели Клобухара
и модели Клобухара ![]() , а так же их
соотношение.
, а так же их
соотношение.
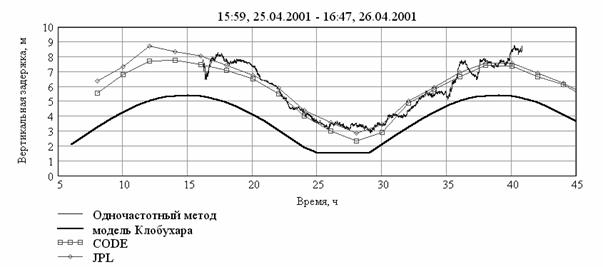
Рис. 3. Результаты эксперимента, проведенного 25-26 апреля 2001 г.
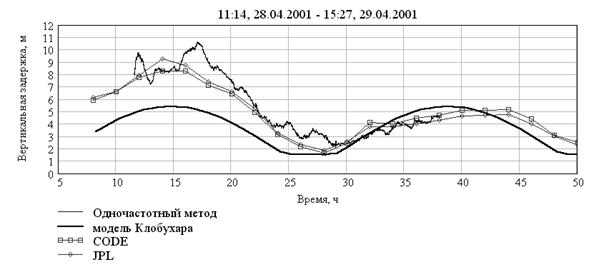
Рис. 4. Результаты эксперимента, проведенного 28-29 апреля 2001 г.
На графиках (рис. 3-4.) приведена оценка вертикальной задержки сигналов в ионосфере, полученных с помощью разработанного метода, модели Клобухара, а так же оценки вертикальной задержки по информации аналитических центров IGS: CODE (Center for Orbit Determination in Europe), Берн, Швейцария; JPL (Jet Propulsion Laboratory), Пасадена, США. На графиках по оси абсцисс приводится число часов, прошедших от начала первых суток эксперимента.
Основные результаты исследований состоят в следующем. Разработан метод определения ионосферной погрешности измерения псевдодальности в одночастотной НАП ГНСС. Особенностью метода является применение одной частоты для определения задержки сигнала в ионосфере без разрешения начальных фазовых неоднозначностей. Сравнение с данными IGS продемонстрировало, что погрешность определения вертикальной задержки сигнала в ионосфере с помощью разработанного метода составляет 0.7 м (СКП). Метод способен устойчиво работать и при повышенной геомагнитной активности (рис.4). Разработанный метод позволил в 3 раза уменьшить погрешность измерения псевдодальностей в одночастотных навигационных приемниках систем ГЛОНАСС и GPS, вызванную влиянием ионосферы, по сравнению с существующей методикой (модель Клобухара).
Литература
1. Conley R., Lavrakas J. W. The world after Selective Availability // Proceedings of ION GPS-99. The Satellite Division of the Institute of Navigation 12th International Technical Meeting. – Nashville, Tennessee, September 14-17, 1999. – P. 1353-1361.
2. Camargo P.O., Monico, J.F.G., Ferreira L.D.D. Application of ionospheric corrections in the equatorial region for L1 GPS users // Earth Planets Space. – 2000. – V.52. – P. 1083-1089.
3. Липкин И. А. Спутниковые навигационные системы / И. А. Липкин. – М.: Вузовская книга, 2001. – 288 с.
4. Hofmann-Wellenhof B., Lichtenegger H., Collins J. Global Positioning System. Theory and Practice. Springer-Verlag Wien New York, 1994. – 356 p.
5. ICD-GPS-200, Revision C, U.S. Government, October 10, 1993.
6. Global Positioning System Standard Positioning Service Performance Standard October, 2001.
7. Komjathu A., Langley R.B. Improvement of a Global Ionospheric Model to Provide Ionospheric Range Error Corrections for Single-frequency GPS Users // Proceedings of the ION 52nd Annual Meeting Workshop, MA, USA, 19-21 June, 1996.
8. Сетевые спутниковые радионавигационные системы. / Под ред. В. С. Шебшаевича. – М.: Радио и связь, 1993. – 408 с.
9. Nisner P., Trethewey M. GPS Ionospheric Determinations Using L1 Only // Proceedings of the 5th International conference on “Differential Satellite Navigation Systems”, Additional Volume, St. Petersburg, Russia, May, 1996.
10. Schaer S. Mapping and Predicting the Earth’s Ionosphere Using the Global Positioning System // Ph. D. dissertation, Astronomical Institute of the University of Bern, Switzerland, 1999. – 208 p.
11. Komjathu A., Langley R.B. The Effect of Shell Height on High Precision Ionospheric Modelling Using GPS // Proceedings of the IGS Workshop in Silver Spring, Maryland, USA, 19-21 March, 1996. – P. 193-203.
12. Noll C.E. CDDIS 2000 Global Data Center Report // IGS 2000 Technical Report. – 2001.
13. Schaer S., Gurtner W., Feltens J. IONEX: The IONosphere Map EXchange Format Version 1, February 25, 1998 // Proceedings of the IGS Analysis Center Workshop ESA/ESOC, Darmstadt, Germany, February 9-11, 1998. – P. 233-247.