УДК 528.852
ПРЕОБРАЗОВАНИЕ ДИНАМИЧЕСКОГО ДИАПАЗОНА РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ ДЛЯ РАЗЛИЧНЫХ СНИМАЕМЫХ ПОВЕРХНОСТЕЙ
М. А. Гурьянов
НИУ «МИЭТ»
Статья получена 3 декабря 2014 г.
Аннотация: Радиолокационное изображения (РЛИ) полученное с радиолокатора с синтезированной апертурой представляет собой значения амплитуды и фазы сигнала в каждый момент времени работы приемника. Для адаптации данных для представления оператору проводится фильтрация, предобработка и преобразование динамического диапазона. В статье рассматриваются проблемы преобразования динамического диапазона в системах РСА, где динамический диапазон исходных данных составляет до 90 дБ. Предлагаются оптимальные методы для решения таких задач, как обнаружение ярких металлических объектов, анализ состояния лесного массива и картографическая привязка.
Ключевые слова: Радиолокация, Радиолокатор с синтезированной апертурой, преобразование динамического диапазона.
Abstract: Raw SAR data contains amplitude and phase of a received signal in every moment of time. A typical SAR image has a dynamic range of 90 dB. In this paper we present new method to convert SAR image into regular digital grayscale image for decryption by the human. Proposed method helps to solve such problems as: point scatter detection, monitoring the forest. Proposed method is based on Weber-Fechner law and statistical research of different SAR data types.
Key words: Radiolocation, SAR, SAR image processing.
Введение
Работа с радиолокационными изображениями, полученными в результате синтеза и применения фильтрации шумов, предусматривает зрительную дешифровку. Несмотря на развитие методов автоматической обработки радиолокационной информации, остается приоритетным визуальное дешифрирование РЛИ с использованием поддержки средствами и процедурами автоматизации. Это обусловлено сложностью характера наблюдаемой поверхности, разнообразием объектов, требующих выявления и классификации по данным радиолокационной съемки, а так-же тем фактом, что зрительный анализатор в сочетании с мыслительным аппаратом реализует близкую к оптимальной пространственную фильтрацию изображений с адаптивным пороговым обнаружением аномалий на статистически однородном фоне и их классификацией [1].
Количественные характеристики обнаружения объектов на РЛИ при визуальном дешифрировании определяются яркостью (контрастом) их изображений.
1. Распределение динамического диапазона на РЛИ
При преобразовании РЛИ к формату выводимого на экран монитора изображения проводится преобразование динамического диапазона с исходных 90 дБ до 256 уровней яркости в классическом представлении картинки в градациях серого. На исходном РЛИ различимыми (различимые согласно закону Вебера-Фехнера [2]) являются различные объекты. Это могут быть яркие металлические цели, поднятые над фоном на 60-70 дБ и отдельно расположенные деревянные постройки, поднятые над фоном на 20-30 дБ.
Проведено всестороннее исследование РЛИ, полученных с РСА авиационного базирования с заявленным динамическим диапазоном 90 дБ и составлена классификация различимых целей. Результаты представлены в Таблице 1.
Важно
заметить, что для других систем РСА численные параметры могут отличаться, но по
результатам выборочной проверки установлено, что аналогичные группы различимых
объектов присутствуют и там [1].
Таблица 1 – классификация обнаружимых целей
|
№ |
Группа целей |
Энергия цели относительно теплового шума тракта, дБ |
|
1 |
Подложка |
~20 |
|
2 |
Одиноко стоящие деревья, кустарник |
30-35 |
|
3 |
Рукотворные объекты, не имеющие открытых металлических поверхностей: Дороги, деревенские дома, мосты и эстакады |
40-45 |
|
4 |
Крупные строения, т.к. панельные дома, торговые центры. |
50-55 |
|
5 |
Крупные искусственные объекты и строения, имеющие открытые металлические элементы, т.к. ангары, ж-д цистерны |
70-75 |
|
6 |
Металлические объекты, т.к. вышки сотовой связи, металлические крыши домов |
85-90 |
2. Преобразование динамического диапазона
Основной задачей процесса преобразования динамического диапазона является сохранение различимости максимального количества объектов (см. Таблицу 1). Основной проблемой является сохранение различимости всех групп объектов относительно друг друга для их корректного визуального восприятия.
В работе [3] предлагается способ визуального представления информации, основанный на локальной статистике независимых сигналов исходного РЛИ и нелинейном преобразователе, который каждому значению мощности сигнала z ставит в соответствие уровень яркости B. В работе рассматривается частный случай нелинейного преобразователя в виде полинома первой степени:
![]() ,
(1)
,
(1)
где: ![]() – минимальное значение
яркости,
– минимальное значение
яркости, ![]() – линейный коэффициент.
– линейный коэффициент.
Доказано, что данный способ сохраняет максимальное радиометрическое разрешение при дешифровании РЛИ.
Важно отметить, что предложенные параметры и формулы приведены для упрощенной модели, где не учитывается индивидуальные особенности зрения операторов.
3. Предлагаемый метод
Разработанный метод основан на подходе создания не единственного оптимального изображения для представления оператору, а семейства изображений, каждое из которых позволяет оптимально сохранить различимость ограниченной группы объектов из табл.1. Для каждого изображения предлагается рассмотреть свою форму нелинейного преобразователя (1).
В контексте данной статьи рассматриваются три функции нелинейного преобразования:
· Нелинейное преобразование, оптимальное мониторинга состояния лесного массива, обнаружения территорий вырубок леса, мониторинга состояния ледяного покрова на водоемах.
Особенностью данного фрагмента РЛИ является отсутствие ярких целей и относительно высокий уровень фона. Для различимости целей по Веберу-Фехнеру для изображений с зернистой структурой:
 . (2)
. (2)
Таким образом, на результирующем изображении должна быть достигнута максимальная разница между фоном и яркостью цели. При этом различимость целей между собой не принципиальна, поскольку РЛИ описанного характера содержит однотипные цели. Предлагаемая функция нелинейного преобразования:
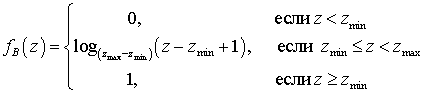
где: ![]() – минимальная граница мощности для выбранного
диапазона объектов,
– минимальная граница мощности для выбранного
диапазона объектов, ![]() – максимальная граница мощности
для выбранного диапазона объектов.
– максимальная граница мощности
для выбранного диапазона объектов.
Форма графика изображена на Рис.1.
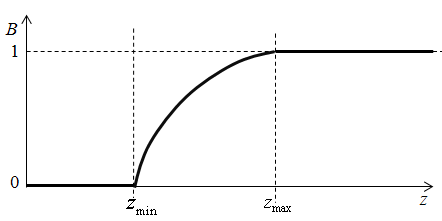
Рисунок 1 – форма логарифмического нелинейного преобразования
· Нелинейное преобразование, оптимальное для изучения регионов застройки малой плотности (деревни).
Характер целей в выбранном динамическом диапазоне таков, что на РЛИ присутствуют как низкоконтрастные объекты (дороги, заборы), так и высококонтрастные цели (крыши домов, автомобили).
Экспертная оценка и проведенные исследования показали, что распределение целей по динамическому диапазону напоминает независимые РЛИ (за исключением того факта, что в выбранный динамический диапазон не входит аддитивный шум) и таким образом, максимальная различимость достигается при использовании классической линейной функции:
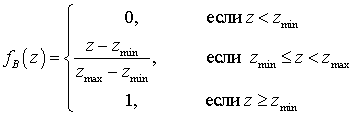 . (4)
. (4)
Форма графика изображена на Рис.2.
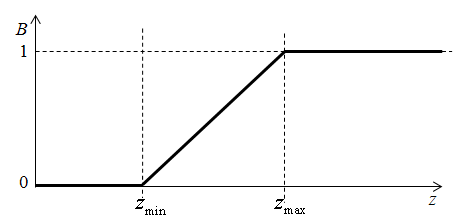
Рисунок 2 – форма линейного преобразования
· Нелинейное преобразование, оптимальное для быстрого обнаружения металлических объектов и конструкций (изучение покрытия сельской местности базовыми станциями сотовой связи).
Отличительной особенностью верхнего фрагмента динамического диапазона является малое влияние спекла и высокая энергия наблюдаемых точек.
Таким образом, преобразование должно обеспечивать высокую различимость между объектами, во избежание их слияния в одну точку. Исследования показали высокие результаты различимости при использовании квадратичного полинома:

Форма графика представлена на Рис.3.
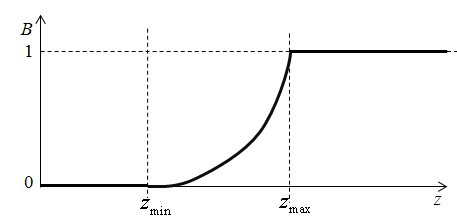
Рисунок 3 – форма нелинейного квадратичного преобразователя
4. Результаты
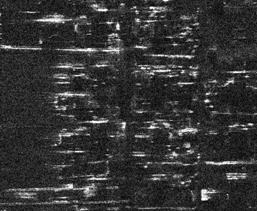
Результаты ручного выбора оптимального преобразования динамического диапазона для различных участков мощностного РЛИ показаны на Рис.4.
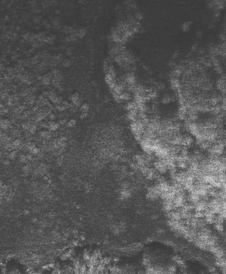
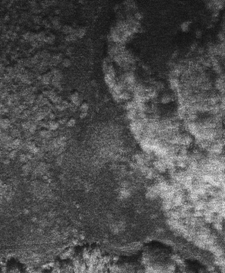
а) б)
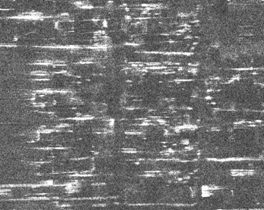
в) г)
Рисунок 4 – Различные участки мощностного РЛИ с использованием нелинейного преобразователя: а) Участок поля с одинокими деревьями, классический линейный преобразователь б) Участок поля с одинокими деревьями, логарифмический преобразователь по формуле (3) в) Плотная застройка, классический линейный преобразователь г) Плотная застройка, квадратичный преобразователь по формуле (5).
5. Заключение
Предложенный метод применяется при решении узконаправленных задач, позволяя предоставить больше полезной информации оператору, удаляя информацию о неподходящих группах целей. Открытым остается вопрос об автоматической классификации наблюдаемой поверхности (или фрагмента поверхности) для выбора оптимального преобразования динамического диапазона.
Литература
[1] В.С. Верба и др. Радиолокационные системы землеобзора космического базирования // Под ред. В.С. Вербы. – М.: Радиотехника, 2010. – 680 с.
[2] Живичин А.Н., Соколов В.С. Дешифрирование фотографических изображений.// М.: Недра, 1980. 253 с.
[3] Неронский Л.Б. Влияние нелинейности регистратора на различимость контрастов при визуальном дешифрировании РЛИ // Вопросы радиоэлектроники. Сер. «Общетехническая». 1978. Вып.9. С.13-34.
[4] Салганик П.О., Ефремов Г.А., Неронский Л.Б., Куликовский М.Г., Курмаев А.А. Радиолокационное зондирование Земли с ИСЗ «Космос-1870» // Исследование Земли из космоса. 1990. № 2. С.70-79.
[5] Рубахин В.Ф. Психологические основы обработки первичной информации. // Л.: Наука. 1974. 296 с.
[6] Неронский Л.Б., Салганик П.О., Яркин В.Ф. Экспериментальное исследование различимости распределенных целей на радиолокационных изображениях // Вопросы радиоэлектроники. Сер. «Общетехническая». 1979. Вып. 1. С.23-36.