УДК 621.396:621.391.82
АДАПТИВНАЯ КОРРЕКЦИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ
О. В. Сытник
Институт радиофизики и электроники им. А.Я. Усикова НАН Украины
Статья получена 20 сентября 2013 г.
Аннотация. Рассмотрена задача адаптивной коррекции траекторных искажений на радиолокационных изображениях подстилающей поверхности при их формировании радиолокатором с синтезированной апертурой антенны. Предложенный метод относится к классу самонастраивающихся, в которых информация о траекторных ошибках извлекается непосредственно из отраженного сигнала. В качестве информационных параметров используется усредненная по наклонной дальности оценка смещения доплеровского спектра на интервале синтезирования. При оценке набега фаз во время маневра носителя РСА в алгоритме коррекции учитывались высшие производные мгновенной наклонной дальности. Это обеспечивает возможность автоматической коррекции изображений, обусловленных не только ошибками по скорости полета носителя, но позволяет учесть ошибки, вызванные неучтенным ускорением и скоростью изменения ускорения. Приведены результаты обработки сигналов когерентного радиолокатора с синтезированием апертуры антенны (РСА). Обсуждаются особенности работы синтезированного, на основе предложенного метода, алгоритма обработки сигналов в различных условиях. Ил. 11. Библиогр.: 12 назв.
Ключевые слова: Когерентный радиолокатор, доплеровский спектр, искажения, траекторные ошибки.
Abstract. The problem of adaptive correction the trajectory distortions on the images of earth surface, which formed by a synthetic-aperture radar (SAR), is discussed. The proposed method belongs to the class of adaptive self- focusing methods, in which the information about trajectory errors retrieves from reflected sounding signal. As information parameter we used the estimates of the Doppler’s spectra displacement averaged through slant range. To estimate the phase in a supporting function during the SAR maneuvering has used the higher derivatives on the instantaneous slant range. It gave the opportunity to build the adaptive algorithm which could automatically correct not only flight velocity errors, but the acceleration and jump errors too. The results of SAR’s signal processing are presented. The features of signals processing in different conditions and implementation of proposed method are discussed. Fig.: 11. Ref.: 12 pos.
Keywords: Coherent Radar, Doppler Spectra, Distortions, trajectory errors, Radar’s Image of Surface, Synthetic Aperture Radar (SAR).
Введение
Бортовые радиолокационные станции с синтезированием апертуры антенны (РСА) формируют радиолокационное изображение (РЛИ) местности путем когерентной обработки сигналов, отраженных от подстилающей поверхности. Принцип синтезирования основан на перемещении бортовой антенны РЛС для последовательного формирования антенной решетки больших размеров на траектории полета [1–2]. Амплитуда и фаза отраженного от подстилающей поверхности колебания, регистрируемого приемным устройством вдоль траектории полета носителя РСА, содержит информацию об участках местности и объектах на ней. Такой принцип землеобзора эффективно используется в РСА космического и самолетного базирования для решения важных научных и практических задач. При этом радиолокационные изображения местности при цифровой обработке можно оперативно получать непосредственно на борту носителя с высоким пространственным разрешением.
Отклонения от заданной траектории полета носителя РСА, которые не учтены в алгоритме обработки сигнала в виде соответствующих корректирующих функций, приводят к искажениям результирующего радиолокационного изображения. В частности, это расфокусировка по азимутальной и дальностной координатам, смещение объектов относительно их истинного положения, потеря яркости изображения, увеличение боковых лепестков синтезированной диаграммы направленности, что влечет за собой повторы целей, и ряд других искажений. Поэтому для получения радиолокационных изображений приемлемого качества приходится ограничивать интервал синтезирования или применять различные методы компенсации траекторных ошибок.
Коррекция траекторных ошибок при синтезировании апертуры в РСА осуществляется на основе целого ряда различных методов [3–8]. Всю совокупность методов можно разделить на три группы:
-
методы, использующие информацию о положении носителя в каждой точке его траектории от специальных бортовых датчиков различного типа;
-
методы, использующие информацию об отклонении реальной траектории полета от расчетной, извлеченную из траекторного сигнала;
-
комбинированные методы.
Создание радиолокационной аппаратуры, инвариантной к типу и характеристикам бортовых навигационных средств и одновременно обеспечивающей автоматическую коррекцию радиолокационных изображений, возможно благодаря извлечению информации о траекторных ошибках непосредственно из отраженного сигнала. Именно этому классу методов посвящена настоящая работа.
1. Постановка задачи
В общем виде алгоритм формирования синтезированной апертуры в азимутальном направлении для фиксированной дальности можно представить в виде интеграла свертки [1]
где ![]() - операция вычисления модуля;
- операция вычисления модуля; ![]() - интервал времени, в течении которого выполняется
синтезирование апертуры антенны;
- интервал времени, в течении которого выполняется
синтезирование апертуры антенны;
![]()
![]() - аддитивная смесь отраженного от
подстилающей поверхности сигнала
- аддитивная смесь отраженного от
подстилающей поверхности сигнала ![]() ;
; ![]() - амплитуда отраженного сигнала;
- амплитуда отраженного сигнала; ![]() - текущее значение наклонной дальности от
фазового центра передающей антенны до
- текущее значение наклонной дальности от
фазового центра передающей антенны до ![]() -го
точечного отражателя;
-го
точечного отражателя; ![]() - длина волны зондирующих
колебаний (без потери общности множитель
- длина волны зондирующих
колебаний (без потери общности множитель ![]() в этом
выражении опущен) и некогерентного гауссовского шума
в этом
выражении опущен) и некогерентного гауссовского шума ![]() с
дисперсией
с
дисперсией ![]() и нулевым математическим ожиданием;
и нулевым математическим ожиданием; ![]() - опорная функция, где
- опорная функция, где ![]() - весовая функция, которая в простейшем
случае может быть
- весовая функция, которая в простейшем
случае может быть ![]() ;
; ![]() -
путевая скорость движения носителя РСА.
-
путевая скорость движения носителя РСА.
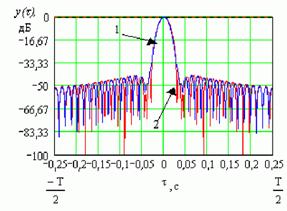
В результате работы алгоритма (1) при условии отсутствия траекторных ошибок формируется диаграмма направленности (ДН) эквивалентной антенны, показанная на рис.1, кривая 1. Кривая 2 рис.1 иллюстрирует характер искажений, возникающих при нестационарном движении летательного аппарата, изменения параметров движения которого не учтены в опорной функции при синтезировании по алгоритму (1). Как видно из рис.1, ошибки в определении путевой скорости приводят к смещению максимума синтезированной ДН, т.е. к появлению ошибок целеуказания.
|
|
|
Рис.1. Синтезированные ДН антенны РСА при отсутствии траекторных ошибок (кривая 1) и при наличии ошибок по путевой скорости и ускорению (кривая 2) |
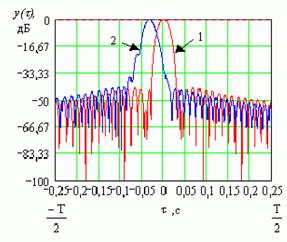
Ошибки в определении ускорения и скорости изменения ускорения приводят к увеличению ширины главного лепестка синтезированной антенны (что эквивалентно потере разрешающей способности РСА в азимутальном направлении), повышению уровня боковых лепестков и асимметрии главного лепестка. На радиолокационном изображении такого рода траекторные ошибки проявляются в виде геометрических искажений, повторов, пятнистости, потере потенциала локатора, что, в свою очередь, приводит к искажениям контрастов отдельных участков и расфокусировке изображения в целом. При формировании обеих диаграмм использовалась опорная функция с весовой функцией Хэмминга [9].
2. Информационный сигнал
Характер изменения траекторного
сигнала на интервале синтезирования ![]() при облучении бортовым
локатором точечной цели подчиняется закону линейного частотномодулированного
колебания с круговой частотой
при облучении бортовым
локатором точечной цели подчиняется закону линейного частотномодулированного
колебания с круговой частотой ![]() . При
. При ![]() закон изменения частоты сигнала в пределах
главного лепестка реальной ДН есть линейная функция, а огибающая его спектра ¾ симметрична относительно
центрального элемента массива отсчетов траекторного сигнала и монотонно убывает
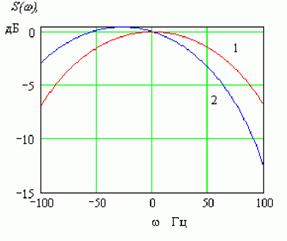
с увеличением частоты (как показано на рис.2, кривая 1). Ошибки в определении
параметров движения носителя РСА приводят к искажениям формы спектральной
плотности, в частности, к ее асимметрии относительно середины распределения
(кривая 2, рис.2). Поэтому кажется перспективным использование отличия формы реального
спектра сигнала от идеального путем введения соответствующих корректирующих
составляющих в опорную функцию алгоритма синтезирования (1).
закон изменения частоты сигнала в пределах
главного лепестка реальной ДН есть линейная функция, а огибающая его спектра ¾ симметрична относительно
центрального элемента массива отсчетов траекторного сигнала и монотонно убывает
с увеличением частоты (как показано на рис.2, кривая 1). Ошибки в определении
параметров движения носителя РСА приводят к искажениям формы спектральной
плотности, в частности, к ее асимметрии относительно середины распределения
(кривая 2, рис.2). Поэтому кажется перспективным использование отличия формы реального
спектра сигнала от идеального путем введения соответствующих корректирующих
составляющих в опорную функцию алгоритма синтезирования (1).
|
|
|
Рис.2. Идеализированная форма огибающей спектра доплеровских частот при отсутствии (кривая 1) и наличии (кривая 2) траекторных ошибок |
Амплитудный спектр доплеровских частот реального сигнала, отраженного от различных по масштабу и радиофизическим свойствам элементов подстилающей поверхности, носит флуктуационный характер, и его непосредственное использование для построения корректирующей опорной функции затруднительно. На рис.3 показан усредненный по 128-ми соседним стробам наклонной дальности спектр траекторного сигнала на участке траектории, где летательный аппарат совершал маневр.
|
|
|
Рис.3. Спектральная плотность доплеровских частот траекторного сигнала при маневре носителя РСА (показана символами +) и ее полиномиальная аппроксимация полиномом третьей степени (сплошная линия) |
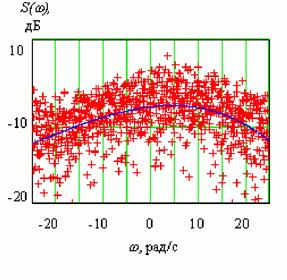
Из-за значительной дисперсии отсчетов огибающей спектра построить формализованную процедуру вычисления достоверных оценок величин смещения и коэффициентов асимметрии для получения корректирующих составляющих опорной функции затруднительно. Однако, если полученные из реальной последовательности спектральные отсчеты аппроксимировать известной функцией, например полиномом, то процедура вычисления корректирующих коэффициентов опорной функции легко формализуется. На рис.3 символом "+" показаны спектральные отсчеты траекторного сигнала, а сплошной линией ¾ его полиномиальная аппроксимация полиномом третьей степени с коэффициентами: 24,469; 0,024; 1,656 * 10-5; -4,507 * 10-8. Коэффициенты полинома вычислялись из системы уравнений

где ![]() ;
; ![]() – степень аппроксимирующего полинома;
– степень аппроксимирующего полинома; ![]() – соответствующий индексу коэффициент
полинома;
– соответствующий индексу коэффициент
полинома;![]() –базисная функция. При условии минимума
величины нормированной среднеквадратичной погрешности аппроксимации
–базисная функция. При условии минимума
величины нормированной среднеквадратичной погрешности аппроксимации
 ,
,
где ![]() ¾ символ операции вычисления
математического ожидания. Достигнутая в этой процедуре
¾ символ операции вычисления
математического ожидания. Достигнутая в этой процедуре ![]() не
превышала 0,248.
не
превышала 0,248.
Кроме того, если предположить, что инерционный летательный аппарат, на котором установлен РСА, не может совершать быстрых по отношению к интервалу синтезирования изменений своего положения, а высокочастотные составляющие спектра флуктуаций фазового центра антенны, обусловленные вибрациями корпуса носителя незначительны, то в разложении в ряд Маклорена [10] показателя экспоненты в выражении для опорной функции можно оставить не более трех составляющих [6]. Тогда, мгновенное значение наклонной дальности r(t) от фазового центра антенны РСА до отражателя на поверхности может быть представлено как:

Используя представление
(3), нетрудно рассчитать проекции фазовых ошибок в опорной функции для смещений
носителя вдоль координат ![]() , где координата
, где координата ![]() совпадает с направлением полета носителя,
координата
совпадает с направлением полета носителя,
координата ![]() - с направлением перпендикулярным
направлению полета и координата
- с направлением перпендикулярным
направлению полета и координата ![]() - с нормалью к поверхности
земли.
- с нормалью к поверхности
земли.


![]() ,
(4)
,
(4)
где DX, DY, DZ – ошибки положения носителя соответственно вдоль линии полета, поперек линии полета и по высоте; DX', DY', DZ', DX'', DY'', DZ'' – соответствующие производные этих ошибок; v -начальная скорость в момент времени t.; q-угол между нормалью, опущенной из фазового центра антенны к подстилающей поверхности и направлением на цель.
Фазовую ошибку, обусловленную совместной неоднозначностью по некомпенсированному углу сноса и положения носителя РСА на орбите (под ошибками положения носителя понимаются ошибки положения фазового центра реальной антенны), определим как ряд
 (5)
(5)
где b, b', b'' ¾ соответственно угол сноса, скорость изменения угла сноса и ускорение изменения угла сноса. А фазовую ошибку, обусловленную совместной неоднозначностью по некомпенсированному углу q между нормалью и направлением излучения, а также положения носителя РСА на орбите по высоте и направлению перпендикулярному линии полета, можно записать в виде
![]()
![]()
![]() .
(6)
.
(6)
Рассмотрим более подробно случай, когда на интервале синтезирования скорость полета носителя РСА изменяется. Как было показано в [12], набег фазы сигнала от точечного отражателя до фазового центра антенны удобно представить в следующем виде:
 , (7)
, (7)
где ![]() ,
, ![]() ,
, ![]() —
скорость полета носителя РСА, его ускорение и производная от ускорения соответственно.
—
скорость полета носителя РСА, его ускорение и производная от ускорения соответственно.
Для коррекции траекторных искажений сигнала в фазовом
множителе опорной функции необходимо учесть коэффициенты ![]() ,
, ![]() , которые
можно подобрать, сравнивая аппроксимирующую реальный спектр кривую 2 (рис.3) с
эталонной кривой 1 (рис.2). Формализовать эту процедуру можно при помощи,
например, метода сопряженных градиентов [11]. Обозначим смещенную спектральную
плотность как
, которые
можно подобрать, сравнивая аппроксимирующую реальный спектр кривую 2 (рис.3) с
эталонной кривой 1 (рис.2). Формализовать эту процедуру можно при помощи,
например, метода сопряженных градиентов [11]. Обозначим смещенную спектральную
плотность как![]() . Тогда, значение аргумента
. Тогда, значение аргумента ![]() соответствующее экстремуму
соответствующее экстремуму ![]() находится путем итерирования процедуры
находится путем итерирования процедуры
где оптимальные значения
коэффициентов ![]() на каждом шаге вычисляются,
исходя из условия
на каждом шаге вычисляются,
исходя из условия
 . (9)
. (9)
Причем для упрощения вычислительной
процедуры коэффициенты ![]() можно выбирать в пределах
можно выбирать в пределах ![]() ,
, ![]() . Тогда
метод сопряженных градиентов (8) сводится к методу тяжелого шарика [11].
. Тогда
метод сопряженных градиентов (8) сводится к методу тяжелого шарика [11].
Коэффициенты ![]() ,
, ![]() подбираются с помощью процедуры (8). Для
случая, показанного на рис.1, процедура (8) формирует ДН РСА, показанную на
рис.4, за 36 итераций при
подбираются с помощью процедуры (8). Для
случая, показанного на рис.1, процедура (8) формирует ДН РСА, показанную на
рис.4, за 36 итераций при ![]() ,
, ![]() .
.
|
|
|
|
Как видно из рис.4, в области
главного лепестка ДН кривые 1 и 2 полностью совпадают. Остаточная ошибка
аппроксимации, обусловленная ошибками определения корректирующих коэффициентов,
проявляется в области боковых лепестков на уровнях ниже минус 50дБ, что для
подавляющего большинства прикладных задач достаточно. Эффект от применения адаптивной
коррекции изображения, которое получено при синтезировании из голограммы
самолетного радиолокатора дециметрового диапазона (![]() м.),
виден при сравнении изображений на рис.5 и рис.6.
м.),
виден при сравнении изображений на рис.5 и рис.6.
|
|
|
|
Рис 5. Фрагмент синтезированного радиоизображения местности при маневре летательного аппарата |
Рис.6. Фрагмент синтезированного радиоизображения местности при маневре летательного аппарата и адаптивной компенсации траекторных ошибок |
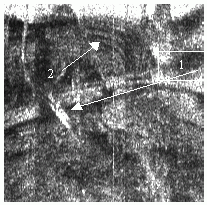
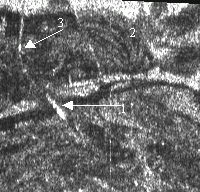
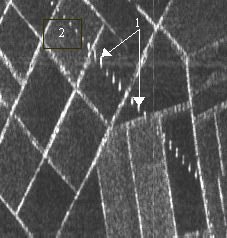
На рис.5-8 азимутальное направление показано сверху вниз, а по наклонной дальности - слева направо. Разрешение по наклонной дальности дециметрового локатора 22,5 м, а по азимуту примерно 10 м.
В частности, в результате применения адаптивной коррекции радиоизображения повтор объекта 1 на рис.5 и 6 отсутствует. Периодическая структура, отмеченная цифрой 2 на обоих рисунках, осталась практически без изменения. При вычислении корректирующих коэффициентов использовалась спектральная оценка, показанная на рис.3.
На рис. 7 и 8 показано применение адаптивной
коррекции изображения когерентного самолетного локатора метрового диапазона
длин волн (![]() м.). Элемент разрешения для изображений
рис.7 и 8 составляет 15х37.5 м.
м.). Элемент разрешения для изображений
рис.7 и 8 составляет 15х37.5 м.
|
|
|
|
Рис.7. Фрагмент радиоизображения местности без коррекции |
Рис.8. Фрагмент радиоизображения местности после обработки алгоритмом с коррекцией траекторных ошибок |

Отклики периодической структуры, обозначенные на рис.7 цифрой 1, на участке, где самолет изменял параметры полета, размазаны в азимутальном направлении. На рис.8 показан этот же участок местности при синтезировании с алгоритмом адаптивной коррекции параметров полета. Как видно из рис.8, отклики от целей на участке 1 приняли форму, аналогичную откликам на участке 2. Кроме того, яркие сплошные линии, представляющие собой отклики от лесополос, прорисованы на рис.8 с более высокой детализацией чем на рис.7.
Кроме визуальной оценки синтезированных изображений подстилающей поверхности в качестве оперативного критерия можно предложить сравнительный анализ радиолокационных контрастов вдоль строки записи сигнала на протяжении всего сеанса работы. (Здесь под строкой понимается запись траекторного сигнала вдоль линии полета.) Так, на рис. 9 показан результат синтезирования одной строки стандартным алгоритмом без коррекции и на рис. 10 ¾ с учетом коррекции траекторных ошибок.
|
|
|
|
Рис. 9. Результат синтезирования 208-го строба дальности дециметрового локатора стандартным алгоритмом |
Рис. 10. Результат синтезирования 208-го строба дальности дециметрового локатора с учетом коррекции траекторных ошибок |
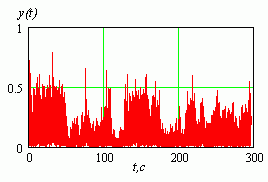

Для удобства сравнения масштаб амплитуд откликов от целей по оси ординат на рис.9 и рис.10 линейный, и амплитуды откликов нормированы к максимуму на рис.10. Общее время записи составляло 300 с при скорости самолета 487 км/час. Наклонная дальность до выбранного строба составляла 13680 м, а интервал синтезирования ¾ 1,8 с. Применение алгоритма адаптивной коррекции практически на всем протяжении полета приводит к увеличению радиолокационных контрастов на 10 – 20 %, а по отдельным целям (например рис.10, цель в интервале между 70 и 90 с полета) амплитуда отклика от одиночной цели возрастает почти 1,5 раза.
Обобщенная структурная схема алгоритма адаптивной коррекции показана на рис.11. Процедура обработки искаженных участков радиоизображений подстилающей поверхности состоит в том, что исходная когерентная запись траекторного сигнала подвергается предварительному Фурье анализу, и одновременно отсчеты траекторного сигнала сохраняются в элементах памяти. В частности, при создании спецпроцессоров бортовой обработки РСА сигналов это могут быть сдвиговые регистры, а при наземной – накопители на жестких дисках, имеющие соответствующий объем памяти.
|
|
|
Рис.11. Структурная схема алгоритма коррекции траекторных ошибок |
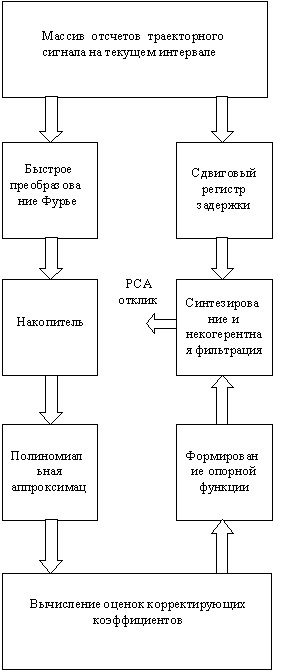
Затем с целью снижения дисперсии флуктуационной составляющей спектральных отсчетов выполняется усреднение по нескольким соседним стробам дальности. Полученную таким образом спектральную оценку подвергают полиномиальной аппроксимации, и результирующий полином исследуют на экстремум при помощи рекуррентной двухшаговой процедуры. Выбор двухшаговой рекуррентной процедуры обусловлен необходимостью компромисса между скоростью сходимости и объемом вычислений, приходящихся на одну итерацию.
Выводы
Таким образом, путем увеличения
вычислительных затрат (примерно на 30% на каждый интервал синтезирования) на
анализ траекторного сигнала и вычисление корректирующих коэффициентов опорной
функции удается построить автономный адаптивный алгоритм коррекции траекторных
ошибок, обусловленных маневром носителя РСА. Как показала практика, применение
такого алгоритма позволяет повысить амплитуду отклика от отражателей на
поверхности до 1,5 раз и повысить разрешающую способность на отдельных участках
почти вдвое по сравнению с традиционным алгоритмом синтезирования. Скорость
сходимости рекуррентной процедуры вычисления траекторных ошибок пропорциональна
геометрической прогрессии и в каждом конкретном случае зависит от величины
начального смещения экстремума от нуля и в общем случае от дисперсии флуктуационной
компоненты. Для представленных в работе реальных записей сигнала алгоритм
аппроксимации давал приемлемые в смысле визуального качества коррекции изображений
оценки смещений скорости и ускорения за 30–40 итераций. Ускорить процедуру
можно путем оптимизации параметров ![]() в алгоритме (8).
в алгоритме (8).
Литература
1. Радиолокационные станции с цифровым синтезированием апертуры антенны / Под ред. В.Т. Горяинова – М.: Радио и связь, 1988 – 304с.
2. Томиясу К.. Радиолокационные станции с синтезированием апертуры и их применение для отображения поверхности океана // Тр. ин-та инж. по электротехнике и радиоэлектронике. - 1978. - 66, № 5. – С.40 – 67.
3. Ицхоки Я.С., Сазонов Н.А., Толстов Е.Ф. Основные характеристики РСА при произвольном движении летательного аппарата // Радиотехника и электроника. - 1984.-29, №11. –С.2164-2172.
4. Hounam D. Motion Errors and Compensation Possibilities // AGARD Lecture Series 182. Fundamentals and Special Problems of Synthetic Aperture Radar (SAR). -1992. – P. 31 – 42.
5. Moreira J.A. A New Method of Aircraft Motion Error Extraction from Radar Raw Data for Real Time SAR Motion Compensation. // Proc., IGARSS Symposium, Vancover, Canada. -1999. – Р. 1- 7.
6. Сытник О.В., Кабанов А.В., Ефимов В.Б. и др. Критерий качества радиолокационного изображения когерентных систем дистанционного зондирования // «Космічна наука і технологія». :Тез. Докл. 2002.- 8, №2/3. – С.287 – 288.
7. Cumming I., Wong F., Hawkins R. RADARSAT-1 Doppler Centroid Estimation Using Phase Based Estimators // Proc., IGARSS Symposium, -2002. – Р. 1-3.
8. Sharif A. H. A., Cumming I. Centroid Estimation for Azimuth-Offset SARs // Proceedings of the IEEE National Aerospace and Electronics Conference, NAECON'95,- 1995, Dayton, Ohio, May 22-26,- P. 134-139.
9. Марпл С.Л. Цифровой спектральный анализ и его приложения / Пер. с англ. Под ред. С.И. Рыжака– М.: Мир, 1990. – 584 с.
10. Бронштейн И.Н., Семендяев К.А. Справочник по математике. – М.: Наука, 1981. – 720 с.
11. Поляк Б.Т. Введение в оптимизацию. – М.: Наука, 1983. – 384 с.
12. Hounam D. Motion Errors and Compensation Possibilities // AGARD Lecture Series 182. Fundumentals and Special Problems of Synthetic Aperture Radar — August 1992. – pp. 3.1-3.11.