УДК 621.396.96
ВЛИЯНИЕ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ АНТЕННЫ И ЭКЛИПСИНГА НА ТОЧНОСТЬ ПЕЛЕНГАЦИИ ЦЕЛИ РАДИОЛОКАТОРОМ С КОНИЧЕСКИМ РАЗВЕРТЫВАНИЕМ ЛУЧА НА ПЕРЕДАЧУ ПРИ ПОДАВЛЕНИИ АКТИВНОЙ ШУМОВОЙ ПОМЕХИ В ОСНОВНОМ ЛЕПЕСТКЕ ПРИЕМНОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ
С. А. Торбин
Военная академия войсковой ПВО Вооруженных Сил РФ имени маршала Советского Союза А. М. Василевского (г. Смоленск)
Статья получена 4 февраля 2015 г.
Аннотация. Методом имитационного моделирования исследовано влияние угловых перемещений цели и источника помехи относительно равносигнального направления антенны моноимпульсного радиолокатора с коническим развертыванием луча на точность пеленгации цели при компенсации шумовой помехи, действующей с направления основного лепестка диаграммы направленности. Исследовано влияние эклипсинга на точность пеленгации цели при коническом сканировании. Определены пределы угловых скоростей перемещения цели и помехи относительно равносигнального направления, при которых ошибки пеленгации не превышают заданных пределов. Определено, что при амплитудной модуляции, возникающей в результате эклипсинга, возникает систематическое смещение пеленга, обусловленное характером изменения огибающей во времени. Предложен способ вычисления пеленгов путем усреднения оценок, полученных для совокупности весовых коэффициентов адаптивной антенной решетки на разных тактах зондирования и обработки сигналов при коническом сканировании.
Ключевые слова: активная шумовая помеха, коническое сканирование, моноимпульсный пеленгатор.
Abstract. The method of imitating modelling is used to investigate the influence of angular movings of the purpose and a hindrance source relative to equisignal directions of the aerial of a monopulse radar with conic expansion of a beam on accuracy of direction finding of the purpose at indemnification of the noise hindrance operating from a direction of the basic petal of the directional diagram. The influence of eclipsing on accuracy of direction finding is investigated in the case when the scanning is conic. Limits of angular speeds of moving purpose and a hindrance relative to equisignal directions at which errors of direction finding do not exceed the set limits are defined. It is defined that at the peak modulation resulting eclipsing, there is a regular displacement пеленга, caused by character of change bending around in time. The way of calculation of bearing by averaging of the estimations received for set of weight factors of an adaptive antenna lattice on different steps of sounding and processing of signals at conic scanning is offered.
Key words: noise interference, conical scanning, monopulse radar.
1. Введение
Сравнительно недавно в работах [1, 2] был приведен способ защиты моноимпульсного пеленгатора от активной шумовой помехи, действующей с направления основных лепестков диаграмм направленности антенн. Суть способа заключается в том, что сигнал помехи и сигнал, отраженный от цели, принятые с помощью четырех квадрантов моноимпульсной антенны, нагруженных на четыре независимых приемных канала, складываются с весовыми коэффициентами, вычисленными известными из теории адаптивных антенных решеток методами [3] применительно к особенностям построения моноимпульсных доплеровских радиолокационных систем [4, 5]. Поскольку цель и источник помехи имеют разные угловые координаты, то компенсация активной шумовой помехи (АШП), имеющей с сигналом, отраженным от цели, слабую корреляцию, приводит к формированию в направлении источника АШП провала в результирующей характеристике направленности (ХН), сформированной весовой суммой ХН квадрантов моноимпульсной антенны. Таким образом, АШП оказывается подавленной в основном лепестке результирующей диаграммы направленности (ДН), а сигнал, отраженный от цели имеет остаток, величина которого определяется снижением уровня результирующей ХН относительной уровня суммарной ХН в направлении цели. Для измерения же величины отклонения цели от равносигнального направления (РСН) при передаче зондирующего сигнала используется коническое вращение ДН, которое может достигаться разными способами, один из которых путем фазирования квадрантов на передачу был описан в статьях [1, 2]. Таким образом, при коническом вращении суммарной ДН на передачу при приеме после компенсации АШП, остаток, представляющий сигнал, отраженный от цели будет иметь амплитудную модуляцию, фаза которой относительно фаз опорных сигналов связана с направлением ухода цели от РСН, а глубина модуляции с величиной ухода. Выделив амплитудную модуляцию конического сканирования можно выделить и угловые рассогласования цели известными методами [6].
2. Влияние
угловых перемещений антенны и эклипсинга на точность
пеленгации цели
Поскольку угловая информация содержится в амплитудной модуляции отраженного сигнала, выделенного после компенсации АШП, то при построении импульсно-доплеровских радиолокационных систем могут иметь место факторы, ухудшающие качество выделяемой угловой информации.
Одним из немаловажных факторов в системах с высокой динамикой вращения электромеханического привода антенны является угловое смещение цели и источника АШП от РСН за время формирования обрабатываемых выборок сигнала, что негативно отражается на компенсации АШП. Это влияет на дисперсию оценок угловых координат и на их смещение в зависимости от уровня нескомпенсированной АШП.
Другим
немаловажным фактором, оказывающим прямое воздействие на характер амплитудной
модуляции, является явление так называемого «эклипсинга». Эклипсинг возникает
вследствие того, что радиальная скорость цели ![]() приводит к
смещению не только несущей частоты отраженного сигнала на величину
приводит к
смещению не только несущей частоты отраженного сигнала на величину ![]() , но и к смещению остальных частот
, но и к смещению остальных частот ![]() спектра импульсного сигнала на
величину
спектра импульсного сигнала на
величину ![]() , где
, где ![]() частота повторения зондирующих импульсов (ЗИ);
частота повторения зондирующих импульсов (ЗИ); ![]() – период повторения ЗИ;
– период повторения ЗИ; ![]() – скорость света. Таким образом
эффект Доплера приводит не только к смещению несущей частоты, но и к расширению
или сужению спектра сигнала в зависимости от знака радиальной скорости.
Нетрудно убедиться, что изменяется и частота следования импульсов на величину
– скорость света. Таким образом
эффект Доплера приводит не только к смещению несущей частоты, но и к расширению
или сужению спектра сигнала в зависимости от знака радиальной скорости.
Нетрудно убедиться, что изменяется и частота следования импульсов на величину ![]() , а период следования отраженных
импульсов и их длительность определяются как
, а период следования отраженных
импульсов и их длительность определяются как
![]() ,
, ![]() .
.
При корреляционно-фильтровой
обработке сигналов с высокой частотой повторения стробы дальности привязываются
к длительности и периоду следования зондирующих импульсов. Эта несогласованность
приводит к тому, что за время наблюдения цели (формирования требуемой пачки
отраженных импульсов) импульс цели сдвигается относительно строба дальности.
Это приводит к нарастанию или к убыванию амплитуды сигналов за время пачки,
определяемой площадью перекрытия строба дальности и импульса цели. В общем
случае функция изменения площади перекрытия в зависимости от номера строба дальности
![]() может быть записана как
может быть записана как
 (1)
(1)
где ![]() – время запаздывания импульса отраженного
от цели относительно ближайшего зондирующего импульса;
– время запаздывания импульса отраженного
от цели относительно ближайшего зондирующего импульса; ![]() – текущая дальность до цели. Учитывая
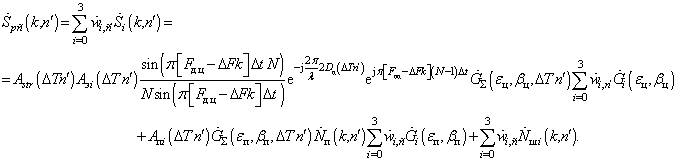
(1) сигнал, отраженный от цели и прошедший все этапы преобразования и корреляционно-фильтровой
обработки, в том числе и адаптивную обработку, можно представить в виде
– текущая дальность до цели. Учитывая
(1) сигнал, отраженный от цели и прошедший все этапы преобразования и корреляционно-фильтровой
обработки, в том числе и адаптивную обработку, можно представить в виде
 , (2)
, (2)
где ![]() - весовые коэффициенты вектора
- весовые коэффициенты вектора ![]() , полученные на такте корреляционно-фильтровой
обработки сигналов с номером
, полученные на такте корреляционно-фильтровой
обработки сигналов с номером ![]() для канала с номером
для канала с номером ![]() ;
; ![]() – корреляционная матрица спектров
сигналов на
– корреляционная матрица спектров
сигналов на ![]() -м такте обработки, элементы которой
определяются как
-м такте обработки, элементы которой
определяются как
 ; (3)
; (3)
![]() – сигнал, отраженный от цели;
– сигнал, отраженный от цели;
![]() – сигнал АШП;
– сигнал АШП;
![]() – шум
– шум ![]() -го канала;
-го канала; ![]() – количество отсчетов в выборке с
номером
– количество отсчетов в выборке с
номером ![]() ;
;
![]() – амплитуда, пропорциональная энергии
импульса, получаемая на выходе фильтра-дециматора;
– амплитуда, пропорциональная энергии
импульса, получаемая на выходе фильтра-дециматора;
 –
модуль суммарной ХН;
–
модуль суммарной ХН; ![]() – комплексные
ХН квадрантов антенны;
– комплексные
ХН квадрантов антенны; ![]() – позиции
фазовых центров квадрантов;
– позиции
фазовых центров квадрантов; ![]() – рабочая длина
волны станции, определяемая отношением скорости света
– рабочая длина
волны станции, определяемая отношением скорости света ![]() к несущей частоте
к несущей частоте ![]() , т. е.
, т. е. ![]() как
как ![]() ;
; ![]() – фазирующая поправка для каждого
– фазирующая поправка для каждого
![]() -го квадранта, в которой углы
фазирования
-го квадранта, в которой углы
фазирования ![]() ,
, ![]() в зависимости от угла скоса диаграммы
направленности на передачу
в зависимости от угла скоса диаграммы
направленности на передачу ![]() и частоты сканирования
и частоты сканирования
![]() определяются как
определяются как ![]() ,
, ![]() ;
;![]() – суммарная импульсная мощность излучения
антенн;
– суммарная импульсная мощность излучения
антенн; ![]() – коэффициент усиления суммарной
антенны;
– коэффициент усиления суммарной
антенны; ![]() – коэффициент усиления
– коэффициент усиления ![]() -го сектора антенны;
-го сектора антенны; ![]() – эффективная поверхность рассеивания
цели;
– эффективная поверхность рассеивания
цели;  –
среднедействующая амплитуда АШП;
–
среднедействующая амплитуда АШП; ![]() – случайный
процесс с единичной среднеквадратической ошибкой, нулевым средним и полосой
частот
– случайный
процесс с единичной среднеквадратической ошибкой, нулевым средним и полосой
частот ![]() , которая уже чем диапазон
анализируемых частот Доплера (уже, чем полоса пропускания дециматора);
, которая уже чем диапазон
анализируемых частот Доплера (уже, чем полоса пропускания дециматора); ![]() – коэффициент, характеризующий глубину
амплитудной модуляции;
– коэффициент, характеризующий глубину
амплитудной модуляции; ![]() – коэффициент
усиления постановщика помех;
– коэффициент
усиления постановщика помех;![]() – текущая
дальность до постановщика АШП. Таким образом нетрудно убедиться, что результирующий
спектр сигналов может быть представлен в виде
– текущая
дальность до постановщика АШП. Таким образом нетрудно убедиться, что результирующий
спектр сигналов может быть представлен в виде
 (4)
(4)
где ![]() – шаг дискретизации по частоте;
– шаг дискретизации по частоте;
 ;
; – спектр собственных шумов канала
– спектр собственных шумов канала ![]() .
.
Из (4) видно,
что результирующий спектр сигнала ![]() после адаптивной обработки как
функция от
после адаптивной обработки как
функция от ![]() определяется суммой сигнала отраженного от цели, сигнала помехи и
собственного шума. Причем первое слагаемое (4) – сигнал цели имеет амплитудную
модуляцию, определяемую суммарной диаграммой направленности на передачу
определяется суммой сигнала отраженного от цели, сигнала помехи и
собственного шума. Причем первое слагаемое (4) – сигнал цели имеет амплитудную
модуляцию, определяемую суммарной диаграммой направленности на передачу ![]() и функцией строба
и функцией строба ![]() (если считать нарастание амплитуды
от времени
(если считать нарастание амплитуды
от времени ![]() незначительным). Второе слагаемое в случае непрерывной АШП
имеет амплитудную модуляцию
незначительным). Второе слагаемое в случае непрерывной АШП
имеет амплитудную модуляцию ![]() , определяемую направлением на помеху
, определяемую направлением на помеху![]() . Множители
. Множители
 и
и

определяют значения результирующей ХН в направлении
цели и помехи. Если угловые координаты цели ![]() и помехи
и помехи ![]() относительно РСН изменяются
вследствие ошибок сопровождения цели антенной пеленгатора, т.е. когда
относительно РСН изменяются
вследствие ошибок сопровождения цели антенной пеленгатора, т.е. когда ![]() и
и ![]() и
и ![]() , это приводит к тому, АШП
подавляется не полностью. В зависимости от уровня АЩП над уровнем сигнала,
остаток нескомпенсированной АШП приводит к смещению пеленга. При этом можно
считать, что изменения во времени настолько незначительны, что их характер не
влияет на результат интегрирования по времени при выполнении процедуры дискретного
преобразования Фурье (ДПФ). В случае эклипсинга множитель
, это приводит к тому, АШП
подавляется не полностью. В зависимости от уровня АЩП над уровнем сигнала,
остаток нескомпенсированной АШП приводит к смещению пеленга. При этом можно
считать, что изменения во времени настолько незначительны, что их характер не
влияет на результат интегрирования по времени при выполнении процедуры дискретного
преобразования Фурье (ДПФ). В случае эклипсинга множитель ![]() влияет на амплитудную модуляцию сигнала,
отраженного от цели.
влияет на амплитудную модуляцию сигнала,
отраженного от цели.
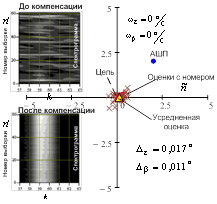
На рис. 1. приведены результаты
моделирования обработки сигналов с конической пеленгации при отсутствии
эклипсинга для сигналов, источники которых имеют угловые скорости 0, 2 и
5 °/с относительно РСН при моделировании цели и источника помехи,
сдвинутых друг от друга на 2 ° в плоскостях ![]() . Результаты
приведены в виде оценок пеленгов
. Результаты
приведены в виде оценок пеленгов
 и
и
 , (5)
, (5)
где
![]() ;
;
для каждого ![]() , который является номером вектора
весовых коэффициентов
, который является номером вектора
весовых коэффициентов ![]() , оцененных на одном из тактов обработки
, оцененных на одном из тактов обработки ![]() . Кроме оценок (5) получены их
усредненные оценки (математические ожидания)
. Кроме оценок (5) получены их
усредненные оценки (математические ожидания)
 и
и
 .
.
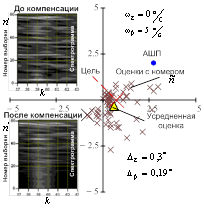
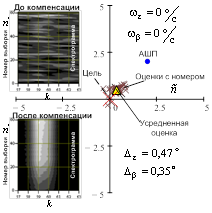
На рис. 2. получены результаты моделирования с теми же угловыми скоростями при наличии эклипсинга пачки импульсов длительностью 0,7 мкс и скважностью 5, отраженных от цели, радиальная скорость которой 100 м/с при длине волны 4 см.

а б в
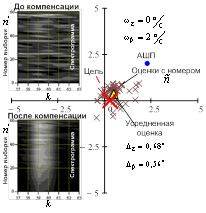
Рис.1 Оценки пеленгов при отсутствии эклипсинга, полученные для угловых скоростей 0, 2 и 5 °/с.

а б в
Рис. 2. Оценки пеленгов при наличии эклипсинга, полученные для угловых скоростей 0, 2 и 5 °/с.
Анализ результатов моделирования показывает, что наличие угловой скорости приводит за время выборки к изменению позиции источника АШП по отношению к провалу в результирующей ДН. При угловых скоростях 2 и 5 °/с смещение источника АШП приводит к ее недостаточной компенсации, что в свою очередь увеличивает ошибки пеленгов, что видно из рассеяния оценок пеленгов, приведенных на рис. 1. б, в и на рис. 2. б, в. Следует отметить, что эклипсинг отрицательно влияет на точность оценок угловых координат. Это видно из сравнения результатов, показанных на рис. 1. а, б и 2. а, б, по увеличению систематической ошибки пеленга. Если сравнивать рис. 1.в и 2.в, можно заметить, что эклипсинг как бы компенсирует смещение оценки в сторону АШП, которое имело место при ее недостаточной компенсации. В результате усредненная оценка пеленгов при угловой скорости 5 °/с имеет меньшее систематическое смещение по сравнению со случаями угловой скорости 0 и 2°/с. Таким образом можно сделать вывод, что меньшее значение ошибки пеленга при эклипсинге для угловой скорости 5 °/с является случайностью, обусловленной разными направлениями систематических смещений, обусловленных эклипсингом и вращением антенны.
3. Выводы
Следует отметить, что эклипсинг и угловые перемещения источника АШП оказывают негативное влияние на точность оценивания угловых координат при коническом сканировании луча на передачу и компенсации АШП. Тем не менее, исследования угловых скоростей перемещения диаграмм направленности антенны по отношении к источникам в составе контура самонаведения показывают, что угловые скорости свыше 2°/с имеют место при небольших расстояниях между локатором и источниками. Что касается эклипсинга, то необходимо принимать меры по снижению его влияния на точность пеленгации цели при коническом сканировании.
Литература
1. Григорян Д.С., Торбин С.А. Способ зашиты от активной шумовой помехи с направления основных лепестков диаграмм направленности антенн моноимпульсного радиопеленгатора. Современное состояние и перспективы развития авиационного радиоэлектронного оборудования. Сборник научных статей по материалам всероссийской НПК «Академические Жуковские чтения» 20-21 ноября ВУНЦ ВВС «ВВА». Воронеж, 2013. с.54–60.
2. Григорян Д.С., Торбин С.А. Способ защиты моноимпульсного радиопеленгатора от активной шумовой помехи по основным лепесткам диаграмм направленности антенн/Д.С. Григорян, С.А. Торбин Антенны,2014, №7. с. 51-61.
3. Монзинго Р. А. Адаптивные антенные решетки. Введение в теорию / Р. А. Монзинго Т. У. Миллер. – М.: Радио и связь, 1986. 448 с.
4. Вексин С. И. Компенсация помех по боковым лепесткам в доплеровских головках самонаведения / Бортовые РЛС и радиолокационные головки самонаведения управляемых ракет / С. И. Вексин // Радиотехника. –2002, № 9. с. 76-86.
5. Козлов С. В. Синтез вариантов структуры радиолокационных измерителей угловых координат с адаптивной пространственной компенсацией помех/ С. В. Козлов В. И. Карпухин В. И. Сергеев Антенны.– 2010.– № 6 (157).– С. 71–76.
6. Основы построения радиотехнических систем наведения зенитных ракетных комплексов: учебное пособие/ Под общ. ред. А. А. Губренюка. – Киев: ВА ПВО СВ., 1974. 616 с.