ПРОГНОЗИРОВАНИЕ ХАРАКТЕРИСТИК ОБНАРУЖЕНИЯ МЕЛКИХ МОРСКИХ ЦЕЛЕЙ С УЧЕТОМ НЕГАУССОВСКИХ МОРСКИХ ОТРАЖЕНИЙ ПРИМЕНИТЕЛЬНО К КОГЕРЕНТНО-ИМПУЛЬСНОЙ РЛС
Е. А. Милащенко, В. Г. Валеев
УРФУ имени первого президента России Б.Н. Ельцина
Статья получена 17 февраля 2014 г.
Аннотация. Исследуются характеристики обнаружения мелких морских целей с малой эффективной поверхностью рассеяния, расположенных на взволнованной морской поверхности, применительно к когерентно-импульсной радиолокационной станции с высоким разрешением. В результате математического моделирования с учетом технических параметров РЛС «Фрегат-МАЭ-4К» и условий радиолокационного наблюдения, приближенных к реальным условиям окружающей среды, установлено, что характеристики обнаружения при распространенной Гауссовской модели помех, основанной на Рэлеевском распределении огибающей отраженного сигнала от взволнованной морской поверхности, значительно оптимистичнее, чем характеристики обнаружения при наиболее адекватной для РЛС с высоким разрешением негауссовской модели помех, основанной на К-распределении огибающей радиолокационных отражений.
Ключевые слова: морские помехи, K-распределение, распределение Рэлея, гауссовские помехи, негауссовские помехи, характеристики обнаружения, когерентно-импульсная РЛС.
Abstract. We research the characteristics of detecting of small sea targets with a small radar cross section, located on the rough sea surface, with respect to the coherent pulse radar with high resolution. As a result of mathematical modeling based on the technical parameters of the radar "Fregat- MAE -4K " and conditions close to real environmental conditions, it was found that the detection performance in advanced Gaussian noise model based on the Rayleigh distribution of the envelope of the reflected signal from the rough sea surface is considerably more optimistic than the detection characteristics for the most appropriate for high-resolution radar non-Gaussian noise model based on K- distribution envelope radar reflections.
Keywords: sea clutter, K-distribution, Rayliigh distribution, Gaussian clutter, non-Gaussian clutter, characteristics of detection, coherent pulse radar.
1. Введение
Радиолокационные станции (РЛС), работающие над морской поверхностью, неизбежно сталкиваются с отражением радиолокационных сигналов не только от объектов, подлежащих обнаружению, но и от самой морской поверхности, что, как правило, приводит к помехам различной природы и, следовательно, ухудшению характеристик обнаружения. Для некоторых областей применения РЛС, например, таких, как системы дистанционного зондирования земли, прием такого отраженного сигнала и является главной целью радара. Например, радары с синтезируемой апертурой при разрешении в несколько метров, установленные на искусственных спутниках земли, используются для океанографических исследований, сбора данных о волнах и течениях, морских льдах и т.п. Однако, для большинства других задач, помехи от морской поверхности нежелательны и могут помешать работе радара. К примеру, почти все бортовые радиолокационные станции, работающие над морем, сталкиваются с морскими помехами в независимости от того, используется ли этот радар для наблюдения за кораблями, низколетящими летательными аппаратами или объектами со сверхмалой эффективной поверхностью рассеяния (ЭПР), такими как перископы или телекоммуникационные буи подводных лодок.
Как видно из наблюдений за морской поверхностью, это, в принципе, не случайная неровная поверхность, однако она имеет изменчивую структуру. Например, когда дует ветер, может возникать небольшая рябь, которая может усиливаться и превращаться в более длинные волны. В некоторый момент волны становятся достаточно большими, чтобы перекатываться. Существует много разновидностей волн, распространяющихся на море, из-за плохих погодных условий. Все эти волны и неоднородности находят свое отражение в принимаемых локатором помехах и природа таких помех должна быть охарактеризована. Важным шагом в достижении этих целей является развитие точных статистических моделей принимаемых помех.
При высоком разрешении РЛС статистическая модель радиолокационных отражений от взволнованной морской поверхности становится негауссовской. Работы [1, 2] посвящены изучению таких моделей. В них показано, что адекватное статистическое описание огибающей радиолокационных отражений от морской поверхности даётся К-распределением. В нашем исследовании эта модель применяется для исследования характеристик обнаружения.
Исследование выполнено применительно к когерентно-импульсной РЛС с высоким разрешением в режиме излучения импульсов со сменой частоты в разных периодах зондирования. Такой режим зондирования сохраняет когерентность сигнала, отражённого от нефлюктуирующей цели, и приводит к статистической независимости помеховых импульсов в разных периодах зондирования.
Исследование проводится путём моделирования в среде MATLAB с учетом условий радиолокационного наблюдения, приближенных к реальным условиям окружающей среды (высота волны, направление ряби, направление ветра, скорость ветра). При этом проводится сравнение характеристик, полученных для гауссовской модели помех (Рэлеевское распределение огибающей), с характеристиками для негауссовской модели, основанной на К-распределении огибающей отраженного сигнала.
2. Прогнозирование характеристик морских помех
Как известно, взаимодействие зондирующего излучения радиолокационных станций с морской поверхностью невозможно описать в строго детерминированных условиях. Поэтому разработчику РЛС, работающих по мелким морским целям с малой ЭПР, расположенным непосредственно на взволнованной морской поверхности или над ней, важно учитывать статистические модели морских помех для наиболее достоверного прогнозирования характеристик обнаружения. Существует множество природных факторов, которые определяют характеристики радиолокационных помех от взволнованной морской поверхности: состояние морской поверхности, скорость ветра, угол между главным лепестком диаграммы направленности (ДН) антенны и направлением ряби, угол между главным лепестком ДН и направлением ветра, потери в атмосфере с учетом погодных условий. Параметры локатора также определяют характеристики помех: высота антенны над уровнем моря, наклонная дальность, длительность импульса, частота несущей, протяженность антенны в азимутальном направлении, излучаемая мощность, коэффициент сжатия импульсов, площадь раскрыва антенны, ширина луча антенны в азимутальном направлении, разрешающая способность локатора, коэффициент усиления антенны. Знание этих параметров позволяет прогнозировать характеристики морских помех.
Для РЛС с низким разрешением, под влиянием эффекта нормализации отраженного сигнала от морских неоднородностей, помехи имеют Гауссово нормальное распределение амплитуды (Рэлеевское распределение огибающей), что не справедливо для РЛС с высоким разрешением, поскольку в ячейку разрешения радара наравне с крупными неоднородностями попадает мелкая рябь, распыленные частички и пена от перекатывающихся волн. Вследствие чего эффект нормализации плотности распределения вероятности радиолокационных отражений отсутствует, и статистическая модель помех становится негауссовской. Таким образом, для учета физических принципов, которые возникают при увеличении разрешающей способности радиолокатора, необходимо модифицировать Гауссовскую модель помех радиолокационных отражений от моря до составных негауссовских моделей.
Самыми
популярными моделями, описывающими статистику огибающей морских помех являются
Рэлеевская модель, лог-нормальная модель и модель Вейбулла. С конца 1990 г. в иностранной литературе огромное внимание уделяется негауссовской статистической модели с
К-распределением плотности вероятности огибающей радиолокационных отражений. В
монографиях [1, 2, 3] показано, что К-распределение огибающей радиолокационных
отражений наиболее адекватно описывает структуру принимаемых помех от
взволнованной морской поверхности для РЛС с высоким разрешением, в том числе
при низких углах скольжения. Плотности распределений вероятности и моменты этих
распределений представлены в Табл. 1 (![]() - огибающая
радиолокационных отражений,
- огибающая
радиолокационных отражений, ![]() - среднеквадратическое
отклонение случайной величины,
- среднеквадратическое
отклонение случайной величины, ![]() - порядковый номер момента,
- порядковый номер момента,
![]() - Гамма функция,
- Гамма функция, ![]() -
математическое ожидание случайной величины,
-
математическое ожидание случайной величины, ![]() - параметр
формы для распределения Вейбулла,
- параметр
формы для распределения Вейбулла, ![]() - параметр формы
К-распределения,
- параметр формы
К-распределения, ![]() - масштабный коэффициент
К-распределения,
- масштабный коэффициент
К-распределения, ![]() - модифицированная функция Бесселя).
- модифицированная функция Бесселя).
Табл. 1 - Популярные модели, описывающие статистику огибающей морских помех
|
Модель |
Плотность распределения вероятности |
Моменты |
|
Рэлея |
|
|
|
Лог-нормальная |
|
|
|
Вейбулла |
|
|
|
К-распределение |
|
|
После изучения [1-4] можно выделить следующие моменты:
· для радаров с низким разрешением, независимо от угла скольжения, огибающая радиолокационных отражений от взволнованной морской поверхности имеет Рэлеевскую плотность распределения вероятности;
· при следующих условиях плотность распределения вероятности морских отражений «скачкообразна» и имеет длинные «хвосты»:
а) высокое разрешение;
б) низкий угол скольжения;
в) неспокойное состояние моря.
В этих случаях статистика огибающей может быть описана лог-нормальным распределением, распределением Вейбулла или К-распределением. Эти распределения могут давать разумную статистику морских отражений для определенных условий радиолокационного наблюдения, однако наиболее адекватной и универсальной является модель отражений, основанная на К-распределении;
·
лог-нормальное распределение всегда дает «скачкообразную»
статистику огибающей помех, в сравнении с моделями, основанными на
распределении Вейбула и К-распределении. При ![]() К-распределение
и распределение Вейбула очень похожи. К-распределение дает более «скачкообразную»
статистику помех, чем распределение Вейбула при больших
К-распределение
и распределение Вейбула очень похожи. К-распределение дает более «скачкообразную»
статистику помех, чем распределение Вейбула при больших ![]() и
менее скачкообразную при меньших
и
менее скачкообразную при меньших ![]() . По результатам
многочисленных экспериментов [1] видно, что модель помех, основанная на К-распределении,
дает наиболее точную статистику огибающей и корреляционных свойств морских
помех. Вместе с тем, оно математически сложнее для работы;
. По результатам
многочисленных экспериментов [1] видно, что модель помех, основанная на К-распределении,
дает наиболее точную статистику огибающей и корреляционных свойств морских
помех. Вместе с тем, оно математически сложнее для работы;
· модель помех с К-распределением плотности вероятности дает наиболее адекватную статистику морских отражений для низкой вероятности ложной тревоги;
· модель помех, основанная на К-распределении, в отличие от других негауссовских моделей не основана на физической модели или механизмах рассеивания. Она основана только на многочисленных экспериментальных данных.
Эти положения объясняют причину широкой популярности модели морских помех, основанной на К-распределении.
3. Модель К-распределения радиолокационных морских помех
Модель К – распределения представляет собой Рэлеевский процесс, усредненный по мощности Гамма распределением [1], и применяется к огибающей сигнала, отражённого морской поверхностью. Эту модель можно обосновать следующим образом. Сигнал, отражаемый морской поверхностью, в каждом отражённом импульсе формируется совокупностью элементарных отражателей и поэтому может считаться Гауссовским, имеющим Рэлеевское распределение огибающей Е:
![]() .
(1)
.
(1)
В процессе радиолокационного наблюдения условия отражения изменяются, случайно изменяя мощность отражённого сигнала (параметр x). Для описания флуктуаций мощности принимают Гамма-распределение [1, 2]:
 .
(2)
.
(2)
где b –масштабный
коэффициент, ![]() - параметр формы,
- параметр формы, ![]() - гамма функция.
- гамма функция.
Параметры b и ![]() зависят от состояния моря и параметров
локатора.
зависят от состояния моря и параметров
локатора.
Выполнив усреднение, получим К-распределение:

где ![]() - модифицированная функция Бесселя, которая и дает
название модели.
- модифицированная функция Бесселя, которая и дает
название модели.
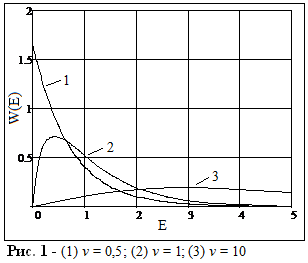
Графики плотности
вероятности для К-распределения, построенные по формуле (3) при различных
значениях параметра формы ![]() , показаны на Рис. 1.
Масштабный коэффициент для всех графиков b = 0,5.
, показаны на Рис. 1.
Масштабный коэффициент для всех графиков b = 0,5.
4. Связь параметров К-распределения радиолокационных морских помех с условиями окружающей среды
Параметр формы v К-распределения определяется по формуле [1, 2, 5]:

где ![]() - угол скольжения в градусах;
- угол скольжения в градусах; ![]() - разрешение радара по дальности;
- разрешение радара по дальности; ![]() - параметр, зависящий от поляризации (1.39
при VV и 2.09 при HH);
- параметр, зависящий от поляризации (1.39
при VV и 2.09 при HH);
![]() - угол между направлением луча РЛС и
направлением морской ряби в радианах.
- угол между направлением луча РЛС и
направлением морской ряби в радианах.
Средняя мощность морской помехи определяется выражениями [1, 6]:
 (6)
(6)
где ![]() - удельная ЭПР облучаемой поверхности;
- удельная ЭПР облучаемой поверхности; ![]() - коэффициент сжатия импульсов;
- коэффициент сжатия импульсов; ![]() - сумма потерь волновых, в фильтрах
радара, антенне;
- сумма потерь волновых, в фильтрах
радара, антенне; ![]() - излучаемая мощность;
- излучаемая мощность; ![]() - потери в атмосфере с учетом погодных
условий; R – наклонная дальность;
G – коэффициент усиления
антенны;
- потери в атмосфере с учетом погодных
условий; R – наклонная дальность;
G – коэффициент усиления
антенны; ![]() - облучаемая площадь;
- облучаемая площадь; ![]() - длина волны зондирующего сигнала.
- длина волны зондирующего сигнала.
Для
того, чтобы рассчитать ![]() , необходимо знать удельную ЭПР
облучаемой поверхности
, необходимо знать удельную ЭПР
облучаемой поверхности ![]() , вычисляемую с помощью
математических моделей, основанных на различных аналитических методах. Эти полуэмпирические
модели используют упрощающие предположения, которые могут быть применены с
некоторыми ограничениями для прогнозирования удельной ЭПР и дают хорошие результаты
как для низких, так и для высоких углов скольжения. В Табл. 2 выполнено
сравнение наиболее распространенных моделей [2]: SIT,
GIT, TSC,
HYB.
, вычисляемую с помощью
математических моделей, основанных на различных аналитических методах. Эти полуэмпирические
модели используют упрощающие предположения, которые могут быть применены с
некоторыми ограничениями для прогнозирования удельной ЭПР и дают хорошие результаты
как для низких, так и для высоких углов скольжения. В Табл. 2 выполнено
сравнение наиболее распространенных моделей [2]: SIT,
GIT, TSC,
HYB.
Табл. 2 – Сравнение моделей удельной ЭПР взволнованной морской поверхности
|
Параметр |
Модель |
|||
|
|
SIT |
GIT |
TSC |
HYB |
|
Несущая частота, ГГц |
9.3, 17 |
1 - 100 |
0.5 - 35 |
0.5 - 35 |
|
Средняя высота волны (м) |
Не учитывается |
0 - 4 |
Согласно состоянию моря (0 – 5) по шкале Дугласа |
Согласно состоянию моря (0 – 5) по шкале Дугласа |
|
Скорость ветра (км/ч) |
< 73.6 |
5.5 - 55 |
||
|
Угол скольжения (град) |
0.2 - 10 |
0.1 - 10 |
0.1 - 90 |
0.1 - 30 |
|
Поляризация |
HH, VV |
HH, VV |
HH, VV |
HH, VV |
|
Несущая частота |
Учитывается |
Учитывается |
Учитывается |
Учитывается |
|
Поляризация |
Учитывается |
Учитывается |
Учитывается |
Учитывается |
|
Шкала состояния моря |
Не учитывается |
Не учитывается |
Учитывается |
Учитывается |
|
Скорость ветра |
Учитывается |
Учитывается |
Не учитывается |
Не учитывается |
|
Средняя высота волны |
Не учитывается |
Учитывается |
Не учитывается |
Не учитывается |
|
Угол скольжения |
Учитывается |
Учитывается |
Учитывается |
Учитывается |
|
Направление ветра и ряби |
Учитывается |
Учитывается |
Учитывается |
Учитывается |
Рассмотренные модели удельной ЭПР, имеют следующие тенденции:
· удельная ЭПР растет при увеличении значения шкалы волнения моря и несущей частоты;
· чем меньше угол скольжения, тем сильнее он влияет на удельную ЭПР;
· удельная ЭПР меньше, если главный лепесток ДН направлен по направлению ветра;
· удельная ЭПР для вертикальной поляризации сигнала больше, чем для горизонтальной, особенно для низких значений шкалы волнения моря. Если значения шкалы волнения моря увеличиваются, то удельная ЭПР для горизонтальной поляризации может превышать удельную ЭПР для вертикальной поляризации, особенно при низких углах скольжения.
Используем GIT модель, так как она учитывает большее количество параметров. В 1970-х годах, ученые из Georgia Institute of Technology (Технологический институт Джорджии, США), разработали модель удельной ЭПР взволнованной морской поверхности. Эта модель подходит для радаров, использующих частоты от 1 ГГц до 100 ГГц. Однако ниже, ориентируясь на используемую в данной работе несущую частоту радара, приведены выражения, которые можно использовать только для радаров, использующих частоты от 1 ГГц до 10 ГГц.
Удельная ЭПР взволнованной морской поверхности определяется выражениями [2]:
![]() , (7)
, (7)
![]() , (8)
, (8)
где параметры Ai, Au, Aw определяются условиями радиолокационного наблюдения по формулам (9)-(11).
Параметр ![]() ,
учитывающий многолучевость и интерференцию определяется
,
учитывающий многолучевость и интерференцию определяется
 .
(9)
.
(9)
Параметр ![]() , учитывающий
направление ветра определяется
, учитывающий
направление ветра определяется
![]() . (10)
. (10)
Параметр ![]() , учитывающий состояние
взволнованной морской поверхности определяется
, учитывающий состояние
взволнованной морской поверхности определяется
 .
(11)
.
(11)
Скорость ветра U, выражается через среднюю высоту волны hAV в виде
![]() .
(12)
.
(12)
Шероховатость морской поверхности определяется как
 ,
(13)
,
(13)
![]() - угол между направлением ветра и лучом
РЛС в радианах;
- угол между направлением ветра и лучом
РЛС в радианах; ![]() - угол скольжения в радианах.
- угол скольжения в радианах.
5. Моделирование случайных чисел, имеющих К-распределение
Алгоритм для моделирования случайных чисел с К-распределением плотности вероятности [6] состоит из двух этапов (Рис. 2):
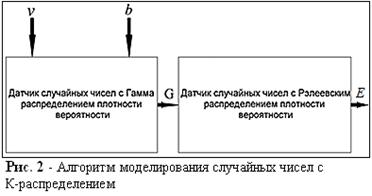
1) Параметр формы К-распределения v и масштабный коэффициент b, зависящие от параметров локатора и условий радиолокационного наблюдения, вычисленные по формулам (4) и (5), определяют параметры датчика случайных чисел с Гамма распределением.
2) Случайные числа G определяют параметр x датчика случайных чисел с Рэлеевским распределением.
Таким образом, на выходе датчика случайных чисел с Рэлеевским распределением имеем случайные числа Е с К-распределением.
На Рис. 3 показаны расчетные и экспериментальные кривые К-распределения с параметрами b=0,5 и v=0,5 на одном графике, по которым видно, что они полностью совпадают (для построения экспериментального графика использовано 1000000 реализаций случайных чисел).

6. Объект исследования
Объект исследования - когерентно-импульсная РЛС, установленная на берегу акватории или борту судна и используемая для получения радиолокационной информации о надводной обстановке.
Исследуемая РЛС (типа «Фрегат-МАЭ-4К»)
имеет параметры: длительность импульса – 0.1·10-6 с; частота несущий – ![]() Гц;
протяженность антенны в азимутальном направлении – 1.8 м; излучаемая импульсная мощность – 500 Вт; протяженность антенны в направлении угла места – 1.5 м; длина волны излучения – 0.375 м; ширина луча антенны в азимутальном направлении – 0.0208 рад;
разрешающая способность – 15 м; коэффициент усиления антенны – 24127;
коэффициент сжатия импульсов – 1; сумма волновых потерь в фильтрах приемника и
антенне – 1; количество накапливаемых импульсов – 800, 100, 10.
Гц;
протяженность антенны в азимутальном направлении – 1.8 м; излучаемая импульсная мощность – 500 Вт; протяженность антенны в направлении угла места – 1.5 м; длина волны излучения – 0.375 м; ширина луча антенны в азимутальном направлении – 0.0208 рад;
разрешающая способность – 15 м; коэффициент усиления антенны – 24127;
коэффициент сжатия импульсов – 1; сумма волновых потерь в фильтрах приемника и
антенне – 1; количество накапливаемых импульсов – 800, 100, 10.
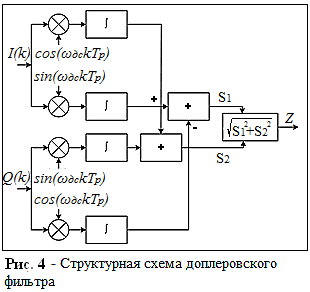
В приёмнике РЛС осуществляется когерентное накопление сигнала после фазового детектора, как показано на Рис. 4.
7. Модель объекта исследования
Моделирование приемника проводится после фазового детектора. Все процессы на выходе фазового детектора представляются временными последовательностями аргумента k (k=1,2,...) с периодом повторения Tp [7, 8].
На входе доплеровского фильтра
![]() ,
(14)
,
(14)
![]() ,
(15)
,
(15)
Синфазная ![]() и квадратурная
и квадратурная ![]() составляющие
сигнала:
составляющие
сигнала:
![]() ,
(16)
,
(16)
![]() .
(17)
.
(17)
Синфазная ![]() и квадратурная
и квадратурная ![]() составляющие
помехи:
составляющие
помехи:
![]() ,
(18)
,
(18)
![]() ,
(19)
,
(19)
![]() - нефлюктуирующая
амплитуда сигнала, отраженного от цели;
- нефлюктуирующая
амплитуда сигнала, отраженного от цели; ![]() - некоррелированные
отчеты амплитуды помехи, сформированные датчиком чисел с Рэлеевской плотностью
вероятности или датчиком чисел с К - распределением;
- некоррелированные
отчеты амплитуды помехи, сформированные датчиком чисел с Рэлеевской плотностью
вероятности или датчиком чисел с К - распределением; ![]() -
доплеровский сдвиг частоты сигнала;
-
доплеровский сдвиг частоты сигнала; ![]() - случайная начальная
фаза сигнала равновероятная в интервале (0:2π);
- случайная начальная
фаза сигнала равновероятная в интервале (0:2π); ![]() -
некоррелированные отчеты случайной начальной фазы помехи равновероятной в
интервале (0:2π).
-
некоррелированные отчеты случайной начальной фазы помехи равновероятной в
интервале (0:2π).
Результат накопления Z подаётся на пороговое устройство.
8. Результаты исследования
8.1 Характеристики обнаружения когерентно-импульсной РЛС без учета параметров локатора и условий радиолокационного наблюдения
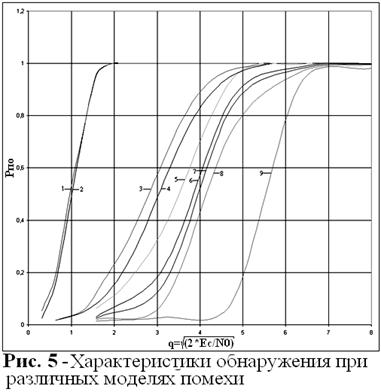
На Рис. 5 представлены характеристики обнаружения для модели помехи, основанной на К-распределении при различных параметрах v и b (при остальных одинаковых условиях), характеризующих различное состояние моря (графики 2-9), а также характеристика обнаружения для модели помехи, основанной на Рэлеевском распределении (график 1). 1 – Рэлеевское распределение; 2 – К-распределение при v=7 и b=7; 3 – К-распределение при v=1 и b=0,5; 4 – К-распределение при v=0,7 и b=0,35; 5 – К-распределение при v=0,4 и b=0,2; 6 – К-распределение при v=0,1 и b=0,05; 7 – К-распределение при v=0,07 и b=0,035; 8 – К-распределение при v=0,04 и b=0,02; 9 – К-распределение при v=0,01 и b=0,005.
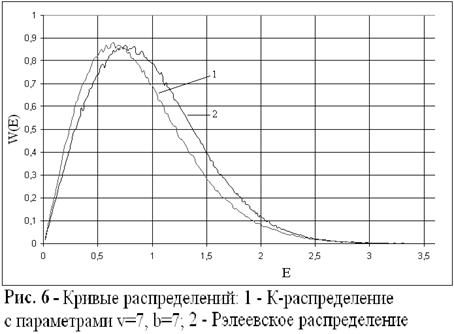
На Рис. 5 график 1 совпадает с графиком 2. Это является следствием того, что графики Рэлеевского распределения и К-распределения при v=7 и b=7 (при остальных одинаковых условиях) близки по форме (Рис. 6).
По Рис. 5 можно сделать вывод, что при модели помехи от взволнованной морской поверхности, основанной на К-распределении, характеристики обнаружения получаются менее оптимистичными, чем при модели помехи, основанной на распределении Рэлея. Поскольку, как показано в монографии [1], К-распределение огибающей радиолокационных отражений наиболее адекватно описывает структуру принимаемых помех от взволнованной морской поверхности для РЛС с высоким разрешением.
Характеристики обнаружения, представленные на Рис. 5, были построены при следующих параметрах математической модели:
· доплеровский сдвиг принимаемого сигнала от цели – 0 рад/с;
·
период повторения импульсов – 3,33*10-5 с, (![]() , где выбранная
наклонная дальность R = 5000 м);
, где выбранная
наклонная дальность R = 5000 м);
· количество накапливаемых импульсов – 10;
· заданная вероятность ложной тревоги – 0,01.
8.2 Характеристики обнаружения морских целей для РЛС «Фрегат-МАЭ-4К» с учетом условий радиолокационного наблюдения
В Табл. 3 и 4 показана вероятность правильного
обнаружения плывущего человека с ЭПР 0,02 м2, в Табл. 5 – вехи с ЭПР 0,1 м2, в Табл. 6 – шлюпки с ЭПР 1 м2 при Рэлеевской модели помехи и при модели помехи, основанной на К-распределении.
Дальность до цели 2000 м, при вероятности ложной тревоги – 0,01 и высоте
антенны над уровнем моря 30 м. Сравнение
проводится для четырех различных высот волн и при остальных одинаковых
условиях.
Табл. 3 – Плывущий человек с ЭПР 0,02 м2, количество накапливаемых импульсов – 800
|
Высота волн, м |
0,3 |
1,0 |
1,7 |
2,7 |
|
|
Вероятность обнаружения (Рлт = 0.01) |
Рэлеевская модель |
1 |
0,87 |
0,72 |
0,48 |
|
К – распределение |
1 |
0,85 |
0,69 |
0,43 |
|
Табл. 4
– Плывущий человек с ЭПР 0,02 м2, количество накапливаемых импульсов
– 100
|
Высота волн, м |
0,3 |
1,0 |
1,7 |
2,7 |
|
|
Вероятность обнаружения (Рлт = 0.01) |
Рэлеевская модель |
0,96 |
0,08 |
0,07 |
0,04 |
|
К – распределение |
0,81 |
0,026 |
0,02 |
0,01 |
|
Табл. 5 - Веха с ЭПР 0,1 м2, количество накапливаемых импульсов – 100
|
Высота волн, м |
0,3 |
1,0 |
1,7 |
2,7 |
|
|
Вероятность обнаружения (Рлт = 0.01) |
Рэлеевская модель |
1 |
0,63 |
0,41 |
0,3 |
|
К – распределение |
1 |
0,14 |
0,13 |
0,03 |
|
Табл. 6 - Шлюпка с ЭПР 1 м2, количество накапливаемых импульсов – 10
|
Высота волн, м |
0,3 |
1,0 |
1,7 |
2,7 |
|
|
Вероятность обнаружения (Рлт = 0.01) |
Рэлеевская модель |
1 |
0,62 |
0,42 |
0,29 |
|
К – распределение |
0,99 |
0,03 |
0,02 |
0,01 |
|
По результатам исследования можно сделать следующие выводы.
1. Характеристики обнаружения чувствительны к виду модели, применяемой для описания помехи, при небольшом количестве накапливаемых импульсов. При накоплении больших пачек импульсов, ввиду нормализации статистики обнаружения, чувствительность к виду модели снижается.
2. Модель с Рэлеевским распределением даёт завышенные значения вероятности правильного обнаружения, по сравнению с более точной моделью, основанной на К-распределении.
Литература
1. Ward K. Sea clutter: scattering, the K distribution and radar performance / K. Ward, R. Tough, S. Watts. – 2nd edition. – Croydon.: CPI Group Ltd, 2013. – 586 p.
2. Antipov I. Simulation of sea clutter returns / I. Antipov. – Salisbury.: DSTO Electronic and surveillance research laboratory, 1998. – 71 p.
3. Redding N. Estimating the Parameters of the K Distribution in the Intensity Domain / N. Redding. – Salisbury.: DSTO Electronic and surveillance research laboratory, 1999. – 75 p.
4. S. Bocquet. Calculation of Radar Probability of Detection in K-Distributed Sea Clutter and Noise / Bocquet S. – Canberra.: DSTO Defence Science and Technology Organisation, 2011. – 35 p.
5. Cetin A. CFAR detection in K-distributed sea clutter / A. Cetin. – Ankara.: Middle east technical university, 2008. – 139 p.
6. Милащенко Е. А., Валеев В. Г. Исследование характеристик обнаружения мелких морских целей с учетом негауссовских морских отражений // VII Всероссийская научно-техническая конференция «Радиолокация и радиосвязь». Сборник трудов. 2013. С. 88-92.
7. Валеев В. Г., Вахрушев А. С. Эффективность некогерентной компенсации пассивных помех в импульсно-когерентных РЛС // Изв. вузов России. Радиоэлектроника. 2010. № 5. С. 55-60.
8. Бакулев П. А. Радиолокационные системы / П. А. Бакулев. – Москва.: Радиотехника, 2007. – 376 с.