УДК 621.396.96
исследование
точности Определения местоположения транспортного средства относительно границ
дороги
В. М. Нуждин, В. В. Расторгуев, В. Б. Шнайдер
Московский авиационный институт (Национальный исследовательский университет)
Статья получена 4 августа 2014 г.
Аннотация. Работа посвящена исследованию точности определения местоположения транспортного средства (ТС) относительно границ дороги с использованием панорамного радиолокатора малой дальности. Разработан многоканальный следящий измеритель границы (обочины) дороги с использованием априорной информации о характере распределённой цели. Применительно к данному измерителю дана оценка точности определения местоположения ТС.
Ключевые слова: автомобильный радиолокатор, многоканальный следящий обнаружитель, точность определение местоположения.
Abstract. The paper is devoted to the study of the accuracy of determining the position of the vehicle (V) relative to the boundaries of the road using a panorama short-range radar. A multi-channel tracking detector boundary of the road (roadside) using a priori information about the nature of the distributed target is developed. For this detector the accuracy of positioning the vehicle is presented.
Keywords: automotive radar, multi-tracking detector, vehicle positioning accuracy.
Введение
Одной из серьёзных проблем управления транспортным средством (ТС) является проблема автоматизации его движения для повышения безопасности управления в условиях ограниченной или отсутствия оптической видимости. Как было показано ранее [1,2], основным путём решения данной проблемы является использование автомобильной панорамной РЛС (АРЛС) переднего обзора, относящейся к РЛС малой дальности, специфика которой подробно рассмотрена в работах [3,4].
Препятствием для широкого внедрения АРЛС [1,3] в настоящее время становится поиск и построение алгоритмов вторичной обработки сформированных радиолокационных изображений (РЛИ) в реальном масштабе времени для адекватного восприятия обстановки водителем, а также возможности интерактивного (или автоматизированного) управления движением ТС.
Для интерактивного управления движением ТС необходимо определение его местоположения на дороге за счет обнаружения обочины и измерение дистанции до нее. Измерение расстояния до обочины является нетривиальной задачей, поскольку связано с обнаружением распределенной по дальности и азимуту сильно флуктуирующей цели. Предлагаемый подход позволяет решить эту задачу за счет использования априорной информации о характере и местоположении обнаруживаемого объекта.
1. Определение местоположения автомобиля относительно обочины дороги
Диаграмма направленности АРЛС сканирует в азимутальной плоскости, последовательно облучая участки поверхности, дорожного полотна и окружающей местности. Геометрические соотношения, поясняющие процедуры обзора пространства, представлены на рисунке 3.
Узкий в азимутальной
плоскости антенный луч, совершает сканирование, последовательно занимая
положение, характеризуемое углом ![]() . Отсчет азимутальных углов
осуществляется от оси ОУ слева направо к правой границе дорожного полотна.
. Отсчет азимутальных углов
осуществляется от оси ОУ слева направо к правой границе дорожного полотна.
Для последовательных
положений луча ![]() осуществляется
измерение времени запаздывания сигнала, отраженного от границы перехода «дорожное
полотно-обочина».
осуществляется
измерение времени запаздывания сигнала, отраженного от границы перехода «дорожное
полотно-обочина».
Задачу
определения ширины дорожного полотна в первом приближении упростим, и будем
искать алгоритм, позволяющий по данным, полученным от АРЛС, определить
расстояния от автомобиля до обочины. АРЛС проводит измерения в системе
координат (0ХУ), привязанной к строительным осям автомобиля. Высокодетальное
радиолокационное изображение, формируемое АРЛС [5], позволяет определить не
только расстояние до обочины, но и угол ![]() , характеризующий ориентацию автомобиля относительно
дорожного полотна.
, характеризующий ориентацию автомобиля относительно
дорожного полотна.
Будем полагать, что граница «дорожное полотно-обочина» может быть аппроксимирована прямой линией, которая в системе координат РЛС (начало системы координат привязано к ТС) характеризуется уравнением (1).
![]() , (1)
, (1)
где
![]() - угол между границей дорожного
полотна и осью ОУ, р - расстояние от границы до начала системы
координат, х и у - это координаты произвольной
точки на плоскости РЛИ.
- угол между границей дорожного
полотна и осью ОУ, р - расстояние от границы до начала системы
координат, х и у - это координаты произвольной
точки на плоскости РЛИ.
На рисунке 4 в системе координат, привязанной к строительным осям транспортного средства, представлено положение автомобиля на дороге, граница которой указана пунктиром.

Рисунок 3. Геометрия задачи. Расположение автомобиля на дороге.
АРЛС
осуществляет сканирование пространства перед автомобилем и осуществляет
измерение дальности R и угла ![]() ,
в результате обработки сигналов, отражённых от границы «дорога – обочина».
,
в результате обработки сигналов, отражённых от границы «дорога – обочина».
Уравнение, характеризующее линию ОА в плоскости XOY можно записать в виде, аналогичном выражению (1):
![]() , (2)
, (2)
Знак «-» в выражении
(2) связан с тем, что отсчеты угла ![]() и угла
и угла ![]() берутся
в разных направлениях.
берутся
в разных направлениях.
Координаты точки А - точки пересечения двух прямых, определяются из совместного решения (1) и (2):
 ;
;  (3)
(3)
и соответственно
дальность от начала координат до точки ![]() определяется в виде:
определяется в виде:
![]() (4)
(4)
В
связи с тем, что в выражения (3,4) входят неизвестные величины р
и ![]() , необходимо еще одно измерение
величин
, необходимо еще одно измерение
величин ![]() и
и ![]() ,
,
![]() (5)
(5)
Таким
образом для определения этих неизвестных параметров р
и ![]() необходимо совместное решение
уравнений (4) и (5).
необходимо совместное решение
уравнений (4) и (5).
![]()
![]() (6)
(6)
Если взять отношение:
![]()
![]()
то выражение для вычисления искомого
параметра ![]() запишется в виде:
запишется в виде:
![]() (7)
(7)
Расстояние до обочины р находится из подстановки (7) в (4) и (5):
Измерение
в АРЛС двух дальностей ![]() и
и ![]() и соответственно углов
и соответственно углов ![]() и
и ![]() позволяет определить параметр
позволяет определить параметр ![]() ,
который находится из уравнения (7) и характеризует угол отклонения оси ТС от
направления дорожного полотна, а по формуле (8) находится расстояние до
обочины.
,
который находится из уравнения (7) и характеризует угол отклонения оси ТС от
направления дорожного полотна, а по формуле (8) находится расстояние до
обочины.
2 Алгоритм измерения расстояния до границ дороги и определения ориентации автомобиля на дороге
Методы измерения границ дорожного полотна и угла ориентации ТС относительно границ дороги, рассмотренные выше, используются в многоканальном обнаружителе обочины дороги, алгоритм которого представлен ниже.
Каждый i-й канал обнаружителя представляет собой сечение РЛИ по дальности (рис.4,5,6).
|
Рис.4. Оптическое изображение |
Рис. 5. Радиолокационное изображение |

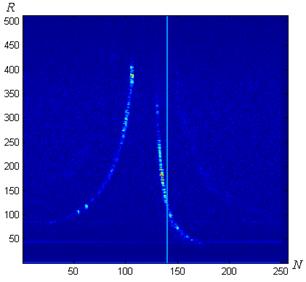
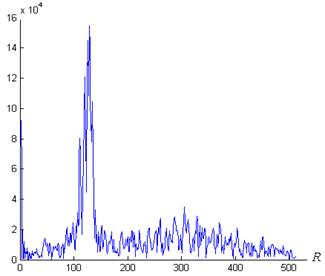
Рисунок 6. Сечение радиолокационного изображения по дальности
На рисунке 4 представлено оптическое изображение и соответствующее ему РЛИ (рис. 5), полученное при помощи АРЛС. На рисунке 5 вертикальной линией отмечено сечение по дальности, которое показано на рис. 6.
Задача
измерения расстояния до обочины и определения угла ориентации
автомобиля относительно границы дороги сводится к определению
дальности до обочины во всех направлениях ![]() ,
в которых происходит зондирование, и последующим статистическом расчете искомых
параметрах
,
в которых происходит зондирование, и последующим статистическом расчете искомых
параметрах ![]() и
и ![]() .
Данную задачу можно разбить на следующие этапы:
.
Данную задачу можно разбить на следующие этапы:
1.
Задается
диапазон допустимых значений величины ![]()
![]() . Данный диапазон выбирается исходя
из априорных сведений о типах дороги, ширины полосы движения.
. Данный диапазон выбирается исходя
из априорных сведений о типах дороги, ширины полосы движения.
2.
Угол
![]() выражается через технические параметры
АРЛС
выражается через технические параметры
АРЛС
![]() , где
, где ![]() - сектор сканирования,
- сектор сканирования, ![]() - количество периодов зондирований
ЛЧМ сигнала за время наблюдения сектора,
- количество периодов зондирований
ЛЧМ сигнала за время наблюдения сектора, ![]() - номер сечения РЛИ по азимуту.
- номер сечения РЛИ по азимуту.
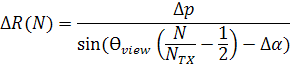
3. Границы зоны поиска по дальности зависят от номера канала
4. Азимутальный сектор обзора разделяется на сектор поиска левой и правой обочины
![]()
![]() – сектор поиска левой обочины
– сектор поиска левой обочины
 – сектор поиска правой обочины
– сектор поиска правой обочины
В итоге на радиолокационном изображении выбирается область, где происходит измерение расстояния до обочины (рис.7)
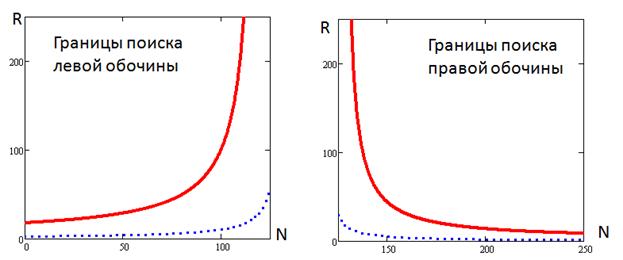
Рисунок 7. Границы поиска обочины.
(Пунктирной линией показана ближняя граница зоны поиска, сплошной линией – дальняя граница)
5.
Вычисление
значений pL,
pR, ![]() осуществляется,
используя оценки дальностей до границы дорожного полотна в каналах (R)
осуществляется,
используя оценки дальностей до границы дорожного полотна в каналах (R)

6. вычисление
средних значений ![]() и среднеквадратических отклонений
и среднеквадратических отклонений ![]() для
оценочных значений p
и
для
оценочных значений p
и
![]() .
.


7. Фильтрация аномальных точек.
Так
как ширина дороги постоянна, то можно из массива R
получить
выборку R’,
по следующему критерию ![]()
![]()
8.
Определение
экстраполированных значений р и ![]() для
формирования оценок этих величин в следующем кадре РЛИ
для
формирования оценок этих величин в следующем кадре РЛИ
![]() ,
,
![]() , для определения
, для определения ![]() и
и
![]() в следующем кадре.
в следующем кадре.
Таким образом, в АРЛС в результате обработки РЛИ можно измерять расстояние до обочины дороги, ширину дороги и угол ориентации автомобиля относительно границы дороги, что позволяет обеспечить не только безопасное движение, но и управление ТС в условиях ограниченной или отсутствия оптической видимости.
3 Оценка допустимой погрешности измерения расстояния до обочины
Рассмотрим погрешность измерения параметра р на больших дальностях.
Полагаем, что ![]() известная
величина (в частном случае ось ТС ориентирована вдоль направления границы дорожного
полотна). В этих условиях при малых значениях угла
известная
величина (в частном случае ось ТС ориентирована вдоль направления границы дорожного
полотна). В этих условиях при малых значениях угла ![]() параметр
p определяется из выражения (8):
параметр
p определяется из выражения (8):
![]() (9)
(9)
Тогда, с учётом (9) относительная ошибка измерения р определяется следующим выражением:
![]()
где:
![]() относительные погрешности
измерение дальности R
и угла
относительные погрешности
измерение дальности R
и угла ![]() .
.
В АРЛС в первом приближении погрешность измерения дальности до границы
раздела «дорожное полотно-обочина» определяется дальномерным разрешением АРЛС и
составляет единицы метров (![]() ). Относительная ошибка измерения
дальности для
). Относительная ошибка измерения
дальности для ![]() составит:
составит:
![]() %
%
Относительная ошибка измерения угла при малой ширине ДНА в азимутальной плоскости определяется выражением:
![]() ,
,
где ![]() - эффективная ширина ДНА в
азимутальной плоскости (
- эффективная ширина ДНА в
азимутальной плоскости (![]() ),
),
![]() -
величина измеряемого угла.
-
величина измеряемого угла.
Если
считать, что автомобиль двигается в правой крайней полосе и расстояние до
обочины составляет 3 метра, то тогда на дальности R = 50 - 80 м,
угол ![]() может принимать значения:
может принимать значения:
![]()
![]() %
%
Результаты
данного анализа показывают, что в итоговой погрешности преобладает ошибка,
обусловленная низкой точностью измерения угловой координаты ![]() ,
поэтому можно считать:
,
поэтому можно считать:
![]() %
%
При
этом, абсолютное значение ошибки ![]() при величине
при величине ![]() дает
погрешность
дает
погрешность ![]() , что можно считать приемлемой
величиной.
, что можно считать приемлемой
величиной.
Можно
организовать измерение расстояния до другой, правой (левой) обочины, а также
использовать априорные сведения о ширине дорожного полотна, которое
стандартизовано. Так, если ширина дорожного полотна составляет величину 8
метров, то соответствующий измеряемый угол ![]() :
:
![]()
![]() % =
% = ![]()
Таким образом, относительна
ошибка уменьшается при увеличении ![]() , но абсолютная – остается
неизменной.
, но абсолютная – остается
неизменной.
Заключение
Для решения задачи автоматизации управления движением ТС в АРЛС разработан многоканальный следящий измеритель расстояния до обочины с использованием априорной информации о характере границы дороги, как распределённой цели. Проведена предварительная оценка точностных характеристик измерения ширины дороги.
Предложенный подход был апробирован при создании в Московском авиационном институте на факультете радиоэлектроники ЛА экспериментального макета автомобильной РЛС и проведении с этим макетом целого ряда натурных испытаний [6]. Таким образом, созданы предпосылки для внедрения АРЛС в автоматизированные системы управления движением транспортных средств.
Статья написана в рамках проекта при поддержке Министерства образования и науки РФ, код проекта 780, научный руководитель Ананенков А.Е.
Литература
1. A.E. Ananenkov, V.M. Nuzhdin, V.V. Rastorguev, P.V. Sokolov, and V.B. Schneider «System Radiovision for Movement Automation of
the Vehicles Column» ICTON 2014.
2. В. Расторгуев, В. Нуждин, Н.Сидоров, Ю. Сулимов и др. «Система радиовидения “АвтоРадар”. Управление движением автомобиля» журнал электроника №5 2000г.
3. Шелухин О.И. Радиосистемы ближнего действия, М: «Радио и связь», 1989г, ISBN 5-256-00337-2.
4. Ананенков А.Е., Нуждин В.М., Расторгуев В.В., Скосырев В.Н. «Особенности оценки характеристик обнаружения в РЛС малой дальности» Радиотехника №11 2013г. стр. 35-38.
5. Andrey Ananenkov, Anton Konovaltsev, Alexey Kukhorev, Vladimir Nujdin, Vladimir Rastorguev – “Features of formation of radar-tracking and optical images in a mobile test complex of radiovision systems of the car”, Journal of Telecommunications and Information Technology, Warsaw, Poland, 1/2009, pp.29-33.
6. Andrey Ananenkov, Anton Konovaltsev, Vladimir Nujdin, Vladimir Rastorguev*, Pavel Sokolov – “Characteristics of Radar Images in Radio Vision Systems of the Automobile”, Proceeding of International Conference on Transparent Optical Networks – ICTON-MW’08, Marrakech, Morocco, December 11-13th, 2008. - IEEE Catalog Number: CFP0833D-CDR, ISBN: 978-1-4244-3485-5, Library of Congress: 2008910892.