| "ЖУРНАЛ РАДИОЭЛЕКТРОНИКИ" N 6, 2001 |  |
МЕТОДИКА ОЦЕНКИ ВЛИЯНИЯ МАСКИРУЮЩИХ СВОЙСТВ МЕСТНОСТИ НА ЭФФЕКТИВНОСТЬ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ОБЪЕКТОВ БОРТОВЫМИ РЛС В ДИНАМИКЕ КОНФЛИКТА
В. Г. Керков, М. М. Скабаров
5 ЦНИИИ МО РФ, г. Воронеж
Получена 12 мая 2001 г.
Разработана имитационная модель, предназначенная для оценки влияния маскирующих свойств рельефа местности на эффективность обнаружения наземных объектов бортовыми радиолокационными станциями (РЛС). Приведены результаты, иллюстрирующие работоспособность модели.
В настоящее время одним из эффективных средств обнаружения наземных объектов (в первую очередь подвижных) на удалениях 50…150 км являются РЛС, размещенные на борту вертолета воздушной разведки (ВВР) [1].
При этом для обнаружения наземных объектов задействуются, как правило, одновременно несколько ВВР. Они поочередно совершают "подскоки" на высоту 2...4 км, производят кратковременное сканирование своей зоны ответственности (обычно 100´100 км2) радиолокационным сигналом, после чего снижаются на высоту 100...200 метров, где их поражение средствами противовоздушной обороны (ПВО) практически невозможно. В системе предусмотрена передача информации о целевой обстановке на наземный пункт. Такой алгоритм работы обеспечивает высокую скрытность радиолокационной разведки и живучесть ВВР.
С учетом указанных выше особенностей разработана имитационная математическая модель, описывающая конфликтный процесс, в котором одна из сторон стремится за заданное время обеспечить эффективное обнаружение наземных объектов, сохранив при этом средства обнаружения и их носители, а другая, соответственно, стремится обеспечить скрытность передвижения своих объектов в зоне обнаружения ВВР, используя маскирующие свойства рельефа местности.
Как правило, наибольший интерес для вертолетных РЛС представляют групповые наземные объекты (групповые цели), состоящие из нескольких однотипных объектов (одиночных целей), например, колонны техники. Перемещения таких объектов в зоне обнаружения вертолетных РЛС характеризуются небольшой продолжительностью (до 0,5…1 часа) и высокой динамикой. Это обстоятельство позволяет рассматривать рельеф местности в зоне конфликта как один из факторов, способных существенно повлиять на эффективность обнаружения.
Для исследования влияния маскирующих свойств рельефа местности на эффективность обнаружения наземных объектов в процессе их перемещения в зоне действия вертолетных РЛС разработана методика на базе имитационной математической модели, описание которой приводится ниже. Она предназначена для оценки возможностей конфликтующих сторон в заданных исследователем условиях.
Модель реализована в виде компьютерной программы, имитирующей функционирование системы разведки из одной или нескольких вертолетных РЛС на этапе обнаружения групповой цели (ГЦ), представляющей из себя колонну техники, передвигающуюся по заданному рельефу либо рельефу со среднестатистическими характеристиками.
Формирование рельефа местности производится в виде изотропного случайного поля высот в узлах равномерной сетки, покрывающей зону передвижения наземных объектов.
Выражение для определения дискретных значений поля высот в узлах сетки имеет вид
![]() ,
,
где
![]() – среднеквадратическое отклонение высоты
рельефа от среднего уровня (над уровнем моря);
– среднеквадратическое отклонение высоты
рельефа от среднего уровня (над уровнем моря);
S(L,M) – массив дискретных значений исходного однородного стационарного случайного поля с параметрами m = 0, s=1;
L=1…Lo, M=1…Mo – номера строк и столбцов, образующих сетку дискретных отсчетов вдоль осей ОХ и ОY соответственно.
Для формирования массива дискретных значений исходного однородного стационарного случайного поля используется метод пространственно – временного скользящего суммирования, описанный в [2].
При этом дискретные значения поля вычисляются с использованием выражений, приведенных ниже:
 ,
,
 .
.
Здесь G*(L,M) – дискретное d - поле;
 – весовая функция,
характеризующая корреляционные свойства рельефа;
– весовая функция,
характеризующая корреляционные свойства рельефа;

N – количество отсчетов при формировании функции С(k);
 – коэффициент
пространственной дискретизации;
– коэффициент
пространственной дискретизации;
Dj – шаг пространственной дискретизации поля высот по осям ОХ и ОY;
sj – параметр, характеризующий интервал корреляции перепада высот.
В приведенных выражениях d - поле G*(L,M) представляет собой совокупность независимых случайных чисел. Моделирование d - поля на ЦВМ осуществляется путем постановки в соответствие пространственной координате (XL, YM) выборочного значения G*(XL, YM) числа из датчика случайных чисел с параметрами m=0, s=1.
Из приведенных выше выражений видно, что для получения дискретных реализаций случайного поля S(L,M) сначала с помощью скользящего суммирования с весовой функцией C(k) формируется совокупность независимых дискретных реализаций G(L,M) (где L – номер реализации, M – номер дискреты в совокупности), а затем с помощью скользящего суммирования по индексу M с весовой функцией C(k) формируются дискретные реализации поля. Использование такого алгоритма существенно сокращает время воспроизведения рельефа.
При необходимости работы с электронной картой местности в программе предусмотрена загрузка данных о рельефе конкретного участка поверхности.
Расчет высоты рельефа местности в произвольной точке, не совпадающей с узлами поля высот, осуществляется путем интерполяции с использованием обобщенной формулы Ньютона [3].
Развивая известные принципы, изложенные в [4, 5], разработанная программа позволяет задать круговую структуру диаграммы обратного рассеяния (ДОР) одиночной цели (ОЦ) с требуемой дискретностью, точно программировать варианты маршрутов движения колонны путем задания координат до 50 точек маршрута и маршрут полета ВВР. В ней также учитывается возможность различения ОЦ не только по дальности, но и по азимуту, что актуально в условиях небольших дальностей "РЛС - цель".
Выходной показатель модели может быть представлен как зависимость вероятности захвата ГЦ на сопровождение вертолетной РЛС от времени движения колонны или пройденного расстояния, а также как плотность вероятности времени захвата ГЦ на сопровождение. При этом под захватом на сопровождение понимается факт обнаружения ГЦ в нескольких обзорах в соответствии с заданным логическим критерием.
При разработке математической модели приняты следующие ограничения и допущения:
- групповая цель состоит из однородных объектов ВВТ, движущихся по заданному маршруту;
- отражающие свойства фона в зоне обзора РЛС считаются однородными и задаются в виде удельной ЭПР фона;
- вертолеты воздушной разведки осуществляют полет по заданным маршрутам патрулирования независимо друг от друга по заданному профилю;
- функционирование канала селекции движущихся целей (СДЦ) РЛС моделируется ослаблением сигналов фонов в заданное число раз, если радиальная скорость цели выше минимально требуемой;
- в момент начала типового эпизода (ТЭ) ГЦ находится в исходном пункте маршрута, РЛС функционирует, а положение ВВР выбирается случайным образом.
Обобщенная структурная схема модели представлена на рис.1.
В программе моделируется район, схема которого представлена на рис.2.
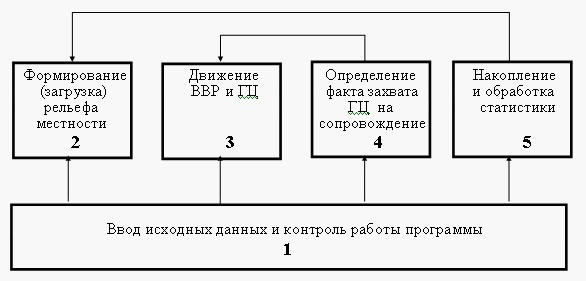
Рис.1. Обобщенная структурная схема модели.
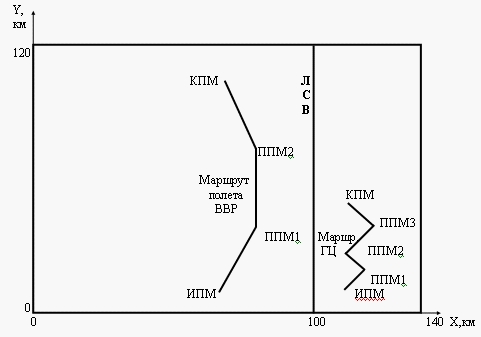
Рис.2. Схема моделируемого района.
Суть работы модели заключается в многократном повторении (имитации) типового эпизода с заданными параметрами, запоминании результатов каждой реализации и последующем их усреднении.
ВВР совершает полет по заданному маршруту вдоль линии соприкосновения войск (ЛСВ), который задается путем ввода координат исходного и конечного пунктов маршрута (ИПМ, КПМ), а также двух промежуточных (ППМ). Достигнув конца маршрута, ВВР разворачивается и совершает полет в обратном направлении. Программа позволяет ввести параметры 1..5 ВВР, которые могут выполнять разведку как по одинаковым, так и по различным маршрутам и профилям полета. Аналогичным образом программируется движение групповой цели, только маршрут может задаваться более детально (до 50 ППМ).
В модели имитируется типовой эпизод, заключающийся в передвижении ГЦ от ИПМ до КПМ по заданному пути. ТЭ заканчивается по факту захвата ГЦ на сопровождение любым ВВР, либо ее прибытием на КПМ. Исходы каждой реализации эпизода запоминаются в модуле 5 и по окончании моделирования в усредненном по множеству реализаций виде выдаются на дисплей либо принтер в затребованной оператором форме. Модуль 2 программы обеспечивает формирование рельефа со среднестатистическими характеристиками по описанной выше методике, либо загрузку конкретного участка электронной карты местности при решении задачи выбора оптимального маршрута. Модуль 3 обеспечивает расчет текущих координат и скоростей ГЦ и ВВР с учетом параметров их движения и рельефа местности. При этом влияние рельефа учитывается только для групповой цели, т.к. ВВР ведет разведку на больших высотах, а точная имитация его полета на малой высоте с огибанием поверхности к новой точке "подскока" интереса для решаемой задачи не представляет. Модуль 1 обеспечивает ввод исходных данных (маршруты, характеристики заметности, параметры РЛС, данные о рельефе и т.п.) и управление работы всей программы.
В модуле 4, являющемся центральным в разработанной программе, определяется факт обнаружения ГЦ в текущем цикле и ее захвата на сопровождение с учетом предыдущих циклов обзора по алгоритму, приведенному на рис.3.
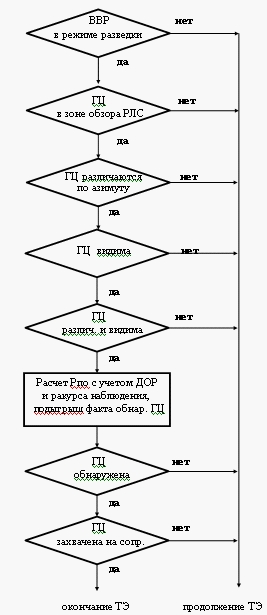
Рис.3. Алгоритм определения факта захвата групповой цели на сопровождение бортовой РЛС .
При вводе исходных данных задается минимально требуемое количество элементарных целей nmin (целей, различаемых РЛС) для классификации обнаруженной колонны как ГЦ. В элементарный разрешаемый объем могут попадать как одна, так и несколько одиночных целей, поэтому производится проверка возможности различения ОЦ и классификации цели в качестве групповой. В модели проверяется факт различения как по дальности, так и по азимуту с одновременным группированием ОЦ по элементарным разрешаемым объемам. На рис. 4 показана ситуация, когда колонна из 10 единиц техники группируется в 6 элементарных целей. Если принять, к примеру, nmin ³ 5, то в данном случае цель потенциально может быть классифицирована как групповая.
Далее проверяется условие видимости каждой ОЦ за складками рельефа и определяется количество видимых объектов - nвид. При выполнении условия nвид³nmin скрытые цели исключаются из дальнейшего рассмотрения и вновь проверяется выполнение условия классификации колонны в качестве ГЦ.
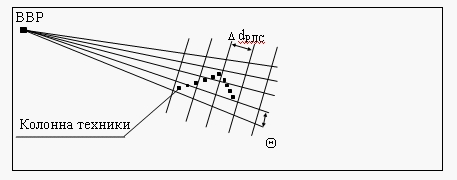
Рис. 4. Группирование одиночных целей по азимуту и дальности.
В следующем блоке алгоритма производится расчет вероятности правильного обнаружения Рпо каждой ОЦ по формуле
Pпо =

где Plt – вероятность ложной тревоги при обнаружении одной пачки импульсов;
qn – отношение сигнал/шум с учетом накопления импульсов, их сжатия, ракурса наблюдения и свойств фона.
Данная формула соответствует "случаю 4" Сверлинга [6] и наиболее адекватна условиям обнаружения групповой цели РЛС ВВР.
Далее методом Монте-Карло определяется факт обнаружения каждой видимой ОЦ, принимается решение – обнаружена ли ГЦ в данном цикле обзора и проверяется условие захвата групповой цели на сопровождение по результатам нескольких циклов в соответствии с заданным логическим критерием.
Модуль 2 (рис. 1) обеспечивает воспроизведение рельефа местности с заданными статистическими характеристиками по описанной выше методике. При работе с конкретной электронной картой местности здесь же возможна загрузка массива данных конкретного рельефа.
Описываемая программа написана и отлажена в среде программирования Delphi. и представляет собой исполняемый файл объемом около 400 КБ, предназначенный для работы в среде Windows.
В качестве иллюстрации работы программы рассмотрим результаты оценки возможности обнаружения и захвата на сопровождение РЛС ВВР колонн автомобилей двух типов как в штатном исполнении, так и оснащенных средствами защиты (СЗ). Данные о структуре ДОР рассматриваемых объектов получены по результатам теоретических расчетов и полигонных измерений. Результаты моделирования приведены на рис. 5 и 6.
|
a) |
б) |

Рис. 5. Зависимость вероятности захвата колонны автомобилей на сопровождение РЛС ВВР от пройденного расстояния в штатном исполнении и с применением СЗ на равнинном (а) и гористом (б) рельефах местности при перемещении в направлении ЛСВ.
|
a) |
б) |
Рис. 6. Зависимость вероятности захвата колонны автомобилей на сопровождение РЛС ВВР от пройденного расстояния в штатном исполнении и с применением СЗ на равнинном (а) и гористом (б) рельефах местности при перемещении вдоль ЛСВ.
Рассматривались два принципиально различных варианта перемещения колонны - в направлении к ЛСВ и параллельно ей. В первом случае важен тот факт, что объекты наблюдаются преимущественно с передней полусферы и, как правило, всегда могут быть обнаружены в режиме СДЦ. При движении же вдоль ЛСВ наземные объекты наблюдаются под ракурсами, близкими к 90°. Возможности канала СДЦ при этом ограничены минимальной радиальной скоростью обнаруживаемой РЛС ВВР цели, а разрешение цели производится преимущественно по азимуту т. к. вся колонна может попадать в один-два элемента разрешения по дальности. Удаление маршрута от ЛСВ и его положение в моделируемом районе вдоль оси OY варьировались и результаты усреднялись.
Полученные результаты свидетельствуют о том, что рассматриваемые меры по защите автомобиля типа 1 в условиях равнинного рельефа местности малоэффективны. Автомобиль остается хорошо заметным для РЛС ВВР. Так, при движении в направлении ЛСВ зависимости вероятности захвата от пройденного пути в штатном исполнении и со средствами защиты практически не отличаются (рис. 5а), а при движении вдоль ЛСВ наблюдается снижение Рзахв с 0.62 до 0.48 при марше на 50 км, однако скрыть факт передвижения также не представляется возможным (рис. 6a).
Что касается автомобиля типа 2, применение СЗ позволит ему практически беспрепятственно двигаться по дорогам, параллельным ЛСВ (Рзахв снижается с 0.6 до 0.01 на маршруте длиной 50 км), однако при направлении перемещения к ЛСВ влияние рассматриваемых мер ощущается слабо (рис. 5а).
На рис. 5б и 6б показаны те же зависимости для автомобиля типа 1 в условиях гористого рельефа (тип 2 в горах практически не заметен – Робн < 0.01). В этих условиях на первый план выдвигается фактор скрытия колонны за складками местности, что существенно снижает вероятность ее захвата на сопровождение по сравнению с равнинным рельефом. В этих условиях эффект от применения СЗ становится еще более значительным. Так, при движении вдоль ЛСВ в горах применение СЗ вдвое снижает Рзахв для автомобиля типа 1 (с 0.2 до 0.1 на марше 50 км), а при движении к ЛСВ Рзахв снижается с 0.6 до 0.4 (рис. 5б). Рост эффекта применения СЗ в гористой местности объясняется тем, что колонна наблюдается РЛС ВВР кратковременно, на отдельных участках дороги, и даже незначительное снижение вероятности обнаружения в результате применения мер по защите наземных объектов дает возможность преодолеть открытый участок незамеченным. На равнинной местности незначительное снижение Робн парируется возможностью наблюдения цели в любом цикле обзора.
В целом полученные результаты хорошо согласуются с физическим смыслом моделируемых процессов, демонстрируют чувствительность модели к изменению параметров и позволяют говорить о работоспособности программы и возможности ее использования по назначению.
Рассмотренная в данной статье математическая модель совместима с другими моделями, предназначенными для оценки эффективности средств защиты [7], что обеспечивает последующее получение оценки эффективности комплексного применения СЗ различных типов в динамике конфликта с РЛС ВВР по различным показателям.
ЛИТЕРАТУРА
1. Иностранная печать об экономическом, научно-техническом и военном потенциале СНГ. Серия "Технические средства разведывательных служб капиталистических государств" №8 - 1995 г.
2. Быков В. В. Цифровое моделирование в статистической радиотехнике. М.: Радио и связь, 1972 г.
3. Корн Г., Корн Т. Справочник по математике. М.: Наука, 1973 г.
4. Дружинин В. В., Конторов Д. С., Конторов М. Д. Введение в теорию конфликта. М.: Радио и связь, 1989.
5. Керков В. Г., Сухоруков Ю. С. Об одном аналитическом методе исследования динамики конфликтов со сложным физическим и информационным взаимодействием. Материалы 24-й военно - научной конференции КВВАИУ, Киев, 1984.
6. Справочник по радиолокации, т.1. Под ред. М. Сколника. М.: Сов. радио, 1977 г.
7. Керков В. Г., Шишко С. М., Скабаров М. М. Оценка эффективности применения средств снижения заметности в конфликте "РУК(РОК) – объект РВ и А". Материалы 10-й научной конференции РВ и А СВ. М.: Воениздат, 1998.
К.т.н. Керков Владимир Георгиевич, Скабаров Михаил Максимович, e-mail: art@icar.vsu.ru
5 ЦНИИИ МО РФ, г. Воронеж