УДК 656.61.052
СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОЙ ПОЗИЦИИ ПРИ СОВМЕСТНОМ МАНЕВРИРОВАНИИ КОРАБЛЕЙ С ИСПОЛЬЗОВАНИЕМ АВТОМАТИЗИРОВАННОЙ ИНФОРМАЦИОННОЙ СИСТЕМЫ (АИС) ПО ДАННЫМ РАДИОНАВИГАЦИОННЫХ СИСТЕМ (РНС)
И. С. Гарматенко
Военный учебно-научный центр ВМФ «Военно-Морская академия»
Статья получена 24 июня 2014 г.
Аннотация. В статье представлен способ повышения точности определения относительной позиции при совместном маневрировании кораблей с использованием автоматизированной информационной системы (АИС) по данным различных радионавигационных систем (РНС) для обеспечения совместного маневрирования кораблей в строях (ордерах).
Ключевые слова: АИС, РНС, совместное маневрирование, позиционирование кораблей в строях.
Abstract The article presents method of increasing accuracy of determining relative position with joint maneuvering ships using automated information system (AIS) according to various radio navigation system (RNS) to provide joint maneuvering the ships in orders.
Keywords: AIS, RNS, joint maneuvering, positioning ships in tuning.
Рассматриваемый вопрос непосредственно связан с необходимостью расширения функциональных возможностей АИС для обеспечения совместного маневрирования кораблей в строях (ордерах) и характеризуется непосредственной зависимостью эффективной работы АИС от данных, вырабатываемых корабельными приёмоиндикаторами (КПИ) спутниковых навигационных систем (СНС) NAVSTAR GPS и ГЛОНАСС. При этом данный вопрос также затрагивает использование АИС для обеспечения безопасности от столкновений судов.
Использование АИС для обеспечения совместного маневрирования и безопасного от столкновений плавания кораблей и судов обеспечивается устойчивой работой СНС NAVSTAR GPS и ГЛОНАСС, однако ситуация может омрачаться нарушениями в работе вышеуказанных систем. Такая ситуация сложилась в апреле - мае 2014 г. на территории Украины в следствии наличия парциальных мертвых зон, в которых прием сигналов GPS NAVSTAR был невозможен, что в очередной раз продемонстрировало уязвимость АИС.
В качестве источника данных координат совместно маневрирующих кораблей в АИС также предусматривается использование КПИ РНС. Однако непосредственное их использование для определения относительной позиции и параметров движения совместно маневрирующих кораблей не эффективно в связи с низкой точностью определения координат по РНС (таблица 1).
Таблица 1 - Основные тактико-технические характеристики
радионавигационных систем
|
№ п/п |
РНС (СНС) |
Дальность действия |
СКП навигац. параметра |
РСКП определения места, м |
|
1. |
РСДН−20 |
10000 км |
1.5 км |
3300 – 10500 |
|
2. |
МАРС−75 |
1000 км |
60 м |
85 – 500 |
|
3. |
РСДН−3 (−4, −5) |
1700 − 4000 км |
90−150 м |
170 – 2000 |
|
4. |
БРАС |
200 км |
12 м |
17−80 м |
|
5. |
РС−10 |
250 км
|
5−15 м |
8−10 м |
Исследования, проводимые во время опытной и штатной эксплуатации наземных РНС в различных районах Мирового океана, позволили оценить величину и характер погрешностей этих системы. В результате обработки статистических данных были получены нормированные временные автокорреляционные функции (АКФ) погрешностей навигационных параметров (НП) основных РНС (математическая модель погрешностей НП РНС) [1].
Нормированные временные АКФ погрешностей НП основных РНС определяются формулами [1]:
- нормированная временная АКФ РНС МАРС-75:
![]() ; (1)
; (1)
- нормированная временная АКФ РНС БРАС:
![]() ; (2)
; (2)
- нормированная временная АКФ РНС РСДН-20:
![]() , (3)
, (3)
где Δt - разность во времени снятия отсчетов КПИ РНС, в минутах.
Современных КПИ РНС [2, 3, 4] позволяют осуществить выбор конкретных цепей РНС и пар станций ВЩ-ВМ, используемых для обсервации. Следовательно, используя для определения относительной позиции координат, полученных при централизованных измерениях на совместно маневрирующих кораблях по единой цепей РНС и пар станций ВЩ–ВМ обеспечивается значение коэффициента корреляции случайных погрешностей координат, близкое к 1, что позволят добиться значительного повышения в точности.
Централизация измерений координат совместно маневрирующих кораблей достигается:
− производством измерений по единой цепи РНС и пар станций ВЩ–ВМ
− дискретностью (1, 4 и 12 секунд) выдачи АИС динамической информации о координатах и параметрах движения совместно маневрирующих кораблей в сообщении о местоположении.
Для оценки точности определения относительной позиции совместно маневрирующих кораблей с использованием АИС по РНС централизованным способом необходимо рассмотреть её зависимость от точности определения координат совместно маневрирующих кораблей. Для упрощения расчетов введем прямоугольную систему координат Х0Y, начало которой совпадает с местом объекта маневра (уравнителя) К с координатами (X0=0,Y0=0), 0Y имеет направление на восток, а 0X на север. Маневрирующий корабль М имеет координаты (X1, Y1), назначенная маневрирующему кораблю М позиция относительно объекта маневра (уравнителя) К имеет координаты (XН,YН). Координаты объекта маневра (уравнителя) К, маневрирующего корабля М известны с точностями, равными ожидаемым РСКП объекта маневра (уравнителя) К МК и маневрирующего корабля М ММ соответственно (рисунок 1).
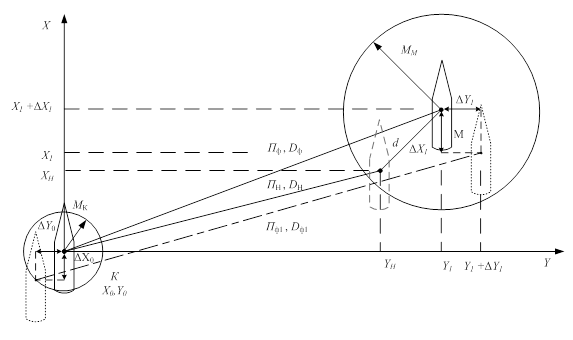
Рис. 1 – Позиции совместно маневрирующих кораблей, определяемые случайными погрешностями координат
Расчет элементов относительной позиции (ПФ и DФ) с учетом случайных погрешностей координат маневрирующего корабля М, корреляционно зависимых с случайными погрешностями координат объекта маневра (уравнителя) К, основан на теореме предсказания [5], в соответствии с которой можно предсказать значение случайной величины x(t+t) в момент времени (t+t), если известны ее текущее значение x(t), автокорреляционная функция ρx(t) и вспомогательная случайная величина у(t), некоррелированная с x(t), с нулевым математическим ожиданием и со СКО s равным СКО случайной величины х(t) sх, т. е.:
![]() (4)
(4)
Следовательно, на один и тот же момент времени (шаг моделирования) можно предсказать значение случайной величины ΔХ1, если известно значение другой случайной величины ΔХ0, коэффициент корреляции между ними r1 и значение вспомогательной случайной величины ΔХП1, некоррелированной с ΔХ1 [5]:
![]() . (5)
. (5)
Для получения корреляционно зависимых случайных погрешностей координат маневрирующего корабля К и объекта маневра (уравнителя) М рассчитываются коэффициенты:
![]() ; (6)
; (6)
![]() , (7)
, (7)
где ![]() – СКО случайной погрешности координат
маневрирующего корабля К;
– СКО случайной погрешности координат
маневрирующего корабля К;
![]() – коэффициент корреляции случайных погрешностей
координат маневрирующего корабля К и объекта маневра (уравнителя) М.
– коэффициент корреляции случайных погрешностей
координат маневрирующего корабля К и объекта маневра (уравнителя) М.
Случайные погрешности координат маневрирующего корабля К, корреляционно зависимые с случайными погрешностями координат объекта маневра (уравнителя) М будут определяться:
![]() (8)
(8)
![]() , (9)
, (9)
где![]() ,
, ![]() -вспомогательные случайные величины, некоррелированные с случайными
погрешностями координат объекта маневра (уравнителя) М
-вспомогательные случайные величины, некоррелированные с случайными
погрешностями координат объекта маневра (уравнителя) М![]() ,
,
![]() и распределенные по нормальному закону
распределения с математическим ожиданием равным нулю и со СКО, соответствующим
РСКП места маневрирующего корабля К.
и распределенные по нормальному закону
распределения с математическим ожиданием равным нулю и со СКО, соответствующим
РСКП места маневрирующего корабля К.
Моделирование
корреляционно независимых случайных погрешностей координат совместно
маневрирующих кораблей произведено с использованием стандартной
функции программной среды Mathсad (rnorm(N,mu,sigma)) [6], выдающей N случайных
чисел, распределенных по нормальному закону распределения, с математическим
ожиданием mu и СКО sigma. Математическое ожидание mu принято равным нулю, СКО
sigma – РСКП координат маневрирующего корабля К![]() и РСКП
координат объекта маневра (уравнителя) М
и РСКП
координат объекта маневра (уравнителя) М ![]() .
.
Расчет элементов относительной позиции совместно маневрирующих кораблей производится по формулам:
 ; (10)
; (10)
![]() . (11)
. (11)
Оценка влияния корреляционной зависимости случайных погрешностей координат совместно маневрирующих кораблей на точность определения относительной позиции производилась методом имитационного моделирования и определялась по значению отклонения от назначенной позиции, определяемого формулой:
![]() . (12)
. (12)
Проведенные исследования показали, что:
1) при определении координат совместно маневрирующих кораблей централизованным способом по РНС БРАС точность определения относительной позиции с использованием АИС при Δt=1 секунда возросла в 2,3 раза, выигрыш в точности определения относительной позиции составил 57%, а при Δt = 4 секунды в 1,18 раза выше, чем при определении относительной позиции в дифференциальном режиме работы СНС NAVSTAR GPS и (или) ГЛОНАСС, выигрыш в точности определения относительной позиции составил 14,7%;
2) при определении координат совместно маневрирующих кораблей централизованным способом по РНС БРАС точность определения относительной позиции с использованием АИС при Δt=1 секунда возросла в 11,6 раза, выигрыш в точности определения относительной позиции составил 91%, а при Δt=4 секунды в 5,8 раза выше, чем при определении относительной позиции в стандартном режиме работы СНС NAVSTAR GPS и (или) ГЛОНАСС, выигрыш в точности определения относительной позиции составил 83%;
3) при определении координат совместно маневрирующих кораблей централизованным способом по РНС МАРС точность определения относительной позиции с использованием АИС при Δt =1 секунда возросла в 3,6 раза, выигрыш в точности определения относительной позиции составил 72%, а при Δt = 4 секунды в 1,8 раза выше, чем при определении относительной позиции в стандартном режиме работы СНС NAVSTAR GPS и ГЛОНАСС, выигрыш в точности определения относительной позиции составил 42%;
4) при определении координат совместно маневрирующих кораблей централизованным способом по РНС РСДН-20 точность определения относительной позиции с использованием АИС при Δt = 1 секунда возросла в 4,7 раза, выигрыш в точности определения относительной позиции составил 79%, а при Δt = 4 секунды в 1, 2 раза выше, чем при определении относительной позиции в стандартном режиме работы СНС NAVSTAR GPS и ГЛОНАСС, выигрыш в точности определения относительной позиции составил 16%.
Представленный способ и полученные результаты могут быть реализованы как в случае дальнейшей модернизации АИС и расширения её функциональных возможностей. В настоящее время для обеспечения централизованных измерений необходимо в ручном режиме производить настройку КПИ для выбора типа РНС, цепей пар ВЩ-ВМ на совместно маневрирующих кораблях и использование полученных в итоге координат для расчета относительной позиции с использованием АИС.
1. Кабиров Р. С., Филонов Л. И., Тихонов А. Ю. Организация навигационно-гидрографического и гидрометеорологического обеспечения боевых действий соединений кораблей ВМФ, часть 2: учеб.пособие. - СПб.: ВМА им. Кузнецова Н.Г., 2004. - 208 с.
2. Исходные данные для ввода информации в корабельные приемоиндикаторы. Координаты станций РНС – СПб.: ГУНиО МО РФ, 2007 – 96 с.
3. Лабутин С.Ф., Хваталин В.А. Морские средства навигации надводных кораблей. Часть 2. Радионавигационные приборы и радиолокация: учебник – СПб.: ВМИ, 2007 – 242 с.
4. Справочник по морским средствам навигации. Том II – СПб.: ГУНиО МО РФ, 1997 – 285 с.
5. Луконин В. П. Теория обработки навигационной информации: учебное пособие – СПб.: ВУНЦ ВМФ «ВМА», 2010. - 295 с.
6. Дьяконов В.П. MathCAD в математике: справочник – М.: Телеком, 2007. – 960 с.