ПОЛЯРИЗАЦИОННАЯ МОДУЛЯЦИЯ ЗОНДИРУЮЩЕГО СИГНАЛА НЕКОГЕРЕНТНОЙ РЛС В ИНТЕРЕСАХ СЕЛЕКЦИИ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ
Д. А. Хомяков 1, А. В. Комиссаров 2
1 Московский государственный технический университет им. Н.Э. Баумана
2 Голицынский пограничный институт ФСБ России
Получена 11 марта 2013 г.
Аннотация. Рассмотрены процедуры, основанные на оценке поляризационных характеристик (ПХ) помех с подавлением их на последующих этапах обзора, проведено сравнение эффективности таких устройств с устройствами, весовые коэффициенты которых определены при известных ПХ радиолокационных объектов (РЛО) и помехи.
Ключевые слова: радиолокационные объекты, поляризационная матрица рассеяния, поляризационный базис.
Abstract. Procedures based on estimating polarization properties of disturbance with suppressing it at subsequent stages of surveillance were considered; comparison of such devices efficiency with devices which weight factors are defined in case of the known target and disturbance polarization properties was conducted.
Keywords: radar targets, dissipation polarimetric matrix, polarization basis.
В некогерентных РЛС использование статистических методов синтеза для разработки систем обнаружения сигналов, отраженных от радиолокационных объектов (РЛО) на фоне мешающих отражений, не позволяет получить в явном виде алгоритм и структуру обработки отраженных сигналов в случае их коррелированных отсчетов.
В то же время оптимальное устройство обработки не имеет практической значимости вследствие сложности своей структуры, неприемлемой для технической реализации. Поэтому целесообразно использовать разумные, но упрощенные критерии синтеза. Один из таких подходов - использование энергетического критерия качества, когда фиксируется класс устройств обработки, и среди этого класса наилучшим считается устройство, на выходе которого реализуется наибольшее относительное приращение мощности за счет полезного сигнала [1].
Современные радиолокационные комплексы в большинстве своем не учитывают тонкую структуру отраженного радиолокационного сигнала при обработке. Как показано в [1,2], математическое моделирование алгоритмов поляризационной селекции дает приблизительную оценку выигрыша от применения поляризационной обработки в ортогональном базисе. Представляет определенный интерес оценка эффективности обнаружения РЛО с флуктуирующими поляризационными характеристиками (ПХ) на фоне мешающих отражений.
Поэтому целесообразно рассмотреть процедуры, основанные на оценке ПХ помех с подавлением их на последующих этапах обзора, и сравнить эффективность таких устройств с устройствами, весовые коэффициенты которых определены при известных ПХ РЛО и помехи [2,3].
Входной сигнал устройства представляет собой квадратичную форму
![]() (1)
(1)
где Х – отсчеты значений отраженных сигналов на выходе квадратичного детектора, соответствующие различным поляризациям на излучение и прием антенны;
W – вектор весовых коэффициентов, максимизирующий функционал качества
![]() (2)
(2)
где Мc.n.{Y} и Мn.{Y} – математические ожидания величины Y при наличии и отсутствии полезного сигнала в наблюдении Х(t).
Выражение (2) можно записать в виде
![]() (3)
(3)
где K = Kс.n. – Kn, Kс.n., Kn, – корреляционные матрицы вектора Х(t) при наличии и отсутствии полезного сигнала в наблюдении Х(t).
Выражение для элементов корреляционной матрицы Кc.n. отсчетов отраженного сигнала имеет вид
 (4)
(4)
где ![]() - мощность помехи;
- мощность помехи; ![]() – отношение мощности сигнала к мощности
помехи;
– отношение мощности сигнала к мощности
помехи; ![]() – отношение внутреннего коррелированного
шума к мощности помехи; Sci, Sni – модули элементов поляризационных матриц рассеяния (ПМР) для РЛО и
помехи, соответственно; Рcij, Pnij – модули взаимной корреляции между
элементами ПМР РЛО и помехи, соответственно;
– отношение внутреннего коррелированного
шума к мощности помехи; Sci, Sni – модули элементов поляризационных матриц рассеяния (ПМР) для РЛО и
помехи, соответственно; Рcij, Pnij – модули взаимной корреляции между
элементами ПМР РЛО и помехи, соответственно; ![]() –
разность фаз коэффициентов корреляции РЛО и помехи; dij – символ Кронекера.
–
разность фаз коэффициентов корреляции РЛО и помехи; dij – символ Кронекера.
Можно показать, что максимальное значение функционала (2) является максимальным корнем уравнения
![]() (5)
(5)
а вектор W, обеспечивающий максимизацию
критерия (2) является собственным вектором матрицы ![]() соответствующей
максимальному собственному числу.
соответствующей
максимальному собственному числу.
Пусть вектор наблюдения будет двухкомпонентным. Это соответствует излучению одной фиксированной поляризации и приему на двухкомпонентную антенну с ортогональными поляризациями или случаю, когда последовательно во времени излучаются два импульса с различными поляризациями и совместно объединяются при приеме.
Максимальный корень (5) при этом будет иметь вид:
![]() . (6)
. (6)
Наибольший интерес в
задаче подавления отражений представляет случай слабого сигнала и сильной
помехи: a2<<1, q2<<1. При этом в (4), (6) можно пренебречь
членами, содержащими а4, q4. Подавление помехи имеет смысл при высоких значениях
степени корреляции помехи, сигнал от цели обычно флуктуирует медленнее мешающих
отражений, поэтому для элементов матрицы К можно использовать
приближение pn = 1, pc = 1(численные расчеты подтвердили правомочность
данного приближения). С учетом этого, коэффициент улучшения устройства,
определяемый как отношение максимального значения функционала качества (3) к
отношению сигнал/помеха на выходе детектора ![]() для
случая, когда зондирование проводится на одной фиксированной поляризации, имеет
для
случая, когда зондирование проводится на одной фиксированной поляризации, имеет
 (7)
(7)
где ![]() – отношения элементов поляризационной
матрицы рассеяния (ПМР) РЛО и помехи (при приеме на двухкомпонентную антенну
степень деполяризации для данного поляризационного базиса).
– отношения элементов поляризационной
матрицы рассеяния (ПМР) РЛО и помехи (при приеме на двухкомпонентную антенну
степень деполяризации для данного поляризационного базиса).
Таким образом, эффективность устройства определяется тем, насколько различны отношения элементов ПМР РЛО и помехи, степенью корреляции помехи, причем сохраняется информация о фазовых различиях ПМР РЛО и помехи.
Анализ эффективности различных методов поляризационной селекции (ПС) РЛО на фоне мешающих отражений показал, что наиболее перспективными являются адаптивные методы ПС, которые могут быть реализованы при использовании в качестве зондирующих поляризационно – модулированных сигналов, обеспечивающих при приеме выделение полной когерентной ПМР. При этом эффективность ПС не зависит от выбранного поляризационного базиса (ПБ) и от ориентации антенной системы РЛС относительно линии визирования. Таким образом при построении РЛС с ПС можно использовать традиционные линейный или круговой ПБ.
Для того, чтобы обеспечить выделение полной ПМР за один период наблюдения необходимо выполнение условия
 (8)
(8)
где Δt – временная задержка; Δw – доплеровский сдвиг; ![]() ,
, ![]() -
комплексные ортогонально-поляризованные компоненты (ОПК) отраженного от объекта
сигнала.
-
комплексные ортогонально-поляризованные компоненты (ОПК) отраженного от объекта
сигнала.
Таким образом, необходимо чтобы в рабочем диапазоне временных задержек и доплеровских сдвигов взаимокорреляционная функция ОПК зондирующего сигнала имела требуемый уровень выбросов. При приеме отраженного сигнала на двухкомпонентную антенну с ортогональными поляризациями при условии (8), при помощи корреляционной обработки или согласованной фильтрации может быть выделена полная ПМР. Наиболее общая схема построения приемо-передающей части РЛС с учетом формирования и выделения дуально-поляризованных сигналов (ДПС) показана на рисунке 1.
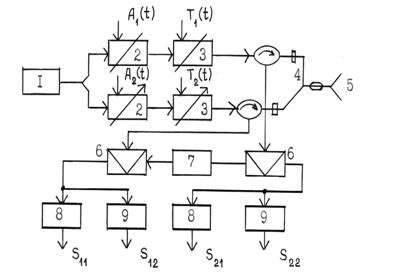
Рисунок 1. Схема построения приемопередающего тракта РЛС формирования и выделения ДПС:
1) генератор СВЧ; 2) управляемый аттенюатор; 3) фазовый модулятор; 4) поляризационный разделитель; 5) поляризационно-изотропная антенна; 6) смеситель канала приема; 7) гетеродин; 8) УПЧ; 9,10) согласованные фильтры ОПК ДПС
В общем случае использование ДПС требует двухканального
построения приемной и передающей части РЛС. Выполнение условия (8) проще всего
осуществить, если ОПК зондирующего сигнала разнесены во времени (межимпульсная
манипуляция двух ортогональных поляризаций), но в этом случае на эффективность
ПС может влиять доплеровский сдвиг [1]. Ортогональность ОПК может быть также
обеспечена за счет разнесения ОПК по частоте для обеспечения требуемых свойств
разрешения отраженных сигналов по дальности и скорости. Для выделения ПМР за
один период повторения необходимо применение внутриимпульсной поляризационной
модуляции. При манипуляции фаз фазовых модуляторов φ1(t) и
φ2(t) поляризационным модулятором (ПМ) (рис.1) на
уровнях 0, π внутри импульса зондирующего сигнала (или в течение периода
наблюдения для РЛС с непрерывным излучением) ОПК могут быть модулированы двумя
квазиортогональными М – последовательностями с требуемой разрешающей
способностью по дальности и скорости. Такая модуляция может быть осуществлена и
в одноканальном ПМ на базе быстродействующих фарадеевских вращателей при манипуляции
угла эллиптичности на уровнях ![]() в произвольном ПБ [2].
Следует отметить, что для подавления методами ПС частично-поляризационных
некоррелированных во времени активных помех необходимо наличие двухканального
приемного устройства. Если же в задачи РЛС входит подавление МО только от
пассивных помех и период флуктуаций отраженных от МО сигналов значительно
больше периода следования импульсов РЛС, то ПС может быть реализована за счет
последовательного излучения импульсов с определенным набором поляризаций при приеме
на антенну, поляризационные параметры (ПП) которой совпадают с излучаемой поляризацией.
В этом случае схема приемопередающей части РЛС может иметь вид, представленный
на рис.2, и реализована при одноканальном приеме.
в произвольном ПБ [2].
Следует отметить, что для подавления методами ПС частично-поляризационных
некоррелированных во времени активных помех необходимо наличие двухканального
приемного устройства. Если же в задачи РЛС входит подавление МО только от
пассивных помех и период флуктуаций отраженных от МО сигналов значительно
больше периода следования импульсов РЛС, то ПС может быть реализована за счет
последовательного излучения импульсов с определенным набором поляризаций при приеме
на антенну, поляризационные параметры (ПП) которой совпадают с излучаемой поляризацией.
В этом случае схема приемопередающей части РЛС может иметь вид, представленный
на рис.2, и реализована при одноканальном приеме.
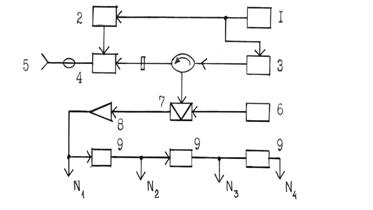
Рисунок 2. Схема построения приемопередающего тракта РЛС с ПС при одноканальном приеме:
1) генератор сигнала «меандр» с периодом Т; 2) устройство управления ПМ; 3) генератор СВЧ; 4) ПМ; 5) поляризационно-изотропная антенна; 6) смеситель канала приема; 7) гетеродин; 8) УПЧ; 9) линия задержки на период повторения импульсов РЛС
Методы, основанные на излучении фиксированной поляризации и двухканальном приеме (при использовании основной S11 и кроссовой S21 компонент) могут быть реализованы при модуляции зондирующего сигнала (при использовании ДПС). Тогда схема построения соответствует рис.1 без поляризационного разделителя и одного приемного канала. В этом случае S11 и S21 выделяются одновременно.
При одноканальном приеме и монополяризованном излучении основная и кроссовая компоненты могут быть выделены при манипуляции ПП приемной антенны. При этом проходящая мощность СВЧ незначительна и ПМ может быть реализован на pin – диодных секциях, быстродействие которых может составлять десятки наносекунд. Практически важной конкретизацией построения приемо-передающего тракта для выделения основной и кроссовой компонент является схема, показанная на рисунке рис.3.
Таким образом, поляризационная внутриимпульсная модуляция и двухканальный прием позволяют за один период следования импульсов Т РЛС выделить полную ПМР. Переключение поляризации от импульса к импульсу при двухканальном приеме позволяет выделить полную ПМР за 2Т, а при одноканальном приеме за 4Т. Следует отметить, что при одноканальном приеме происходит некоторая потеря мощности от цели, в зависимости от ее коэффициента анизотропии. Поляризационная модуляция ПП антенн на передачу и прием позволяет выделить все компоненты ПМР за один период наблюдения при одноканальном тракте приема и усиления. Принципиальными отличиями РЛС с ПС по сравнению с традиционными является наличие поляризационно-изотропных антенн (на передачу и прием), устройств управления поляризацией, которые могут быть выполнены на базе ферритовых устройств или pin – диодных секций, в зависимости от управляемой мощности СВЧ. В случае приеме сигнала на двухкомпонентную антенну с ортогональными поляризациями, применяется поляризационный разделитель, остальные блоки преобразования и усиления просто удваиваются.

Рисунок 3. Схема построения приемопередающего тракта РЛС для выделения основной и кроссовой компоненты при одноканальном приеме:
1) генератор СВЧ; 2) поляризационный разделитель; 3) фазосдвигающая пластина; 4) поляризационно-изотропная антенна; 5) УУ коммутатор СВЧ; 6) генератор сигнала «меандр» с периодом; 7) управляемый pin – диодный аттенюатор; 8) сумматор; 9) смеситель канала приема; 10) гетеродин; 11) УПЧ; 12) линия задержки на период повторения импульсов РЛС
Независимо от типа РЛС и способа выделения ПМР, процессор поляризационной обработки должен реализовать процедуры, описанные в данном разделе. Процедуры адаптивной обработки, основанные на оценке корреляционной матрицы помех, широко применяются в адаптивных антенных решетках [1], и в РЛС, решающих задачи адаптивной доплеровской селекции. Эти процедуры обработки могут быть реализованы в реальном масштабе времени на базе современных интегральных микросхем.
1. Морская радиолокация // Под ред. Винокурова. – Л.: Судостроение, 1986. – 285 с.
2. Горский А.Ф., Пасмуров Ф.Я. Применение поляриметрии для повышения вероятности обнаружения радиолокационных целей // Изв. вузов. Радиоэлектроника, 1988, Т. 31.– С. 76-77.
3. Животовский Л.А. Повышение помехозащищенности РЛС при использовании поляризационно-модулированных зондирующих сигналов // В сб. ”Усиление и преобразование радиосигналов”. – Таганрог, 1975. – С. 63-69.