Архитектура мобильного робота —
элемента программно-аппаратного комплекса для исследования алгоритмов
группового управления
В. А. Александров,
А. И. Кобрин
Московский Энергетический
Институт (Технический Университет)
Получена 2 апреля 2011 г., после доработки – 30 мая 2011 г.
Аннотация. В работе рассматривается архитектура аппаратной части автономного мобильного исследовательского мини-робота, который является частью программно-аппаратного комплекса, созданного для изучения многоагентных кооперативных алгоритмов управления группой мобильных роботов. Мобильный робот оснащён набором бортового оборудования, состоящим из: 8-ми дальномерных модулей, радиомодуля двухсторонней связи, 2-х инфракрасных (ИК) локаторов, способных детектировать специальные ИК-метки, ИК-приемопередающего канала ограниченной дальности, одометрических датчиков, двух двигателей постоянного тока, системы индикации и звукового оповещения. Использование большого количества датчиков мотивировано необходимостью применения системы навигации без использования внешней коррекции при решении задач мобильным роботом. Благодаря этому, алгоритмы разрабатываемые с использованием программно-аппаратного комплекса могут применяться в структурно аналогичных задачах, в которых по каким-либо причинам отсутствует возможность внесения внешней коррекции в навигационную систему робота. Оснащение мобильного робота дублированной системой коммуникации (радио и ИК) обеспечивает широкие возможности по взаимодействию внутри группы роботов.
Ключевые слова: электроника, мобильный робот, групповое управление, сенсорная система.
Abstract. This article describes the hardware architecture of the autonomous mobile research mini-robot which is a part of the hardware & software complex created for studying multiagent cooperational control of mobile robot group algorithms. The mobile robot is equipped by the set of the onboard devices: 8x rangefinding modules, the radio communication module, 2x IR (infra-red) locators, capable to detect special IR-labels, IR directional communication module with the limited range, 2x encoders, 2x DC motors, indication and the sound notification systems. Use of a considerable quantity of sensors is motivated by necessity of application only internal navigation system without any external corrections. Thanks to it, the algorithms developed with use of this hardware & software complex can be applied in structurally similar problems in which external correction of navigating system of the mobile robot cannot be entered. Equipment of the mobile robot by the duplicated communication system (radio and IR) provides ample opportunities of interaction in a group of robots.
Keywords: electronics, mobile robot, group control, sensor based system.
Введение
Целью робототехнического проекта кафедры теоретической механики и мехатроники МЭИ (ТУ) является создание программно-аппаратного комплекса для разработки и исследования новых алгоритмов коллективного поведения в группе роботов, а также адаптации известных алгоритмов к решению задач с минимальной априорной информацией о внешней среде.
В качестве примеров реализованных программно-аппаратных комплексов сходной структуры, можно привести проекты RoboCup[1] и FIRA[2] для международных соревнований по робофутболу, а также проект SWARMROBOT[3] для изучения стайного поведения больших групп роботов. В отличие от указанных систем, описываемый программно-аппаратный комплекс предназначен для более широкого спектра задач, снабжён активным испытательным полигоном и оснащён дублированной системой коммуникации между мобильными роботами.
Программно-аппаратный комплекс состоит из системы имитационного моделирования и тестового полигона, снабжённого набором препятствий, зарядными станциями, и целевыми точками с инфракрасными (ИК) метками. Габаритные размеры испытательного полигона 1,5х2м. Исследовательские роботы (рис. 1), используемые для тестирования алгоритмов на реальном полигоне, представляют собой однотипные автономные мобильные платформы с дифференциальным приводом, набором датчиков и систем коммуникации. Диаметр мобильного робота 120мм, а высота не превышает 70мм. Питание осуществляется от бортовых аккумуляторов.
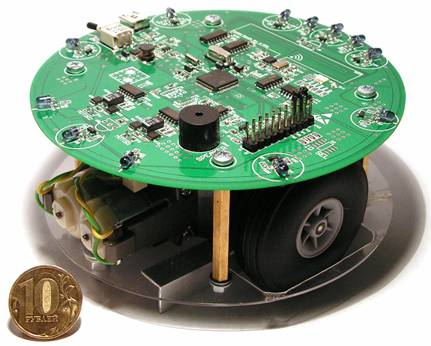
Рис. 1. Внешний вид исследовательского мобильного робота.
При проектировании мобильного мини-робота требуется учесть ряд ограничений: габаритных — по компоновке узлов и агрегатов робота, массовых — по весу робота и энергетических — по общему потреблению энергии мобильного робота в активном и неподвижном режимах [1]. Исходя из требований по изучению задач управления, а также указанных ограничений было решено использовать следующий набор бортового оборудования:
1) 8 дальномерных модулей;
2) радиомодуль двухсторонней связи;
3) 2 ИК-локатора, способных детектировать специальные ИК-метки;
4) ИК-приемопередающий канал ограниченной дальности;
5) одометрические датчики;
6) два двигателя постоянного тока;
7) система индикации и звукового оповещения.
Описание конструкции мобильного робота
Мобильный робот представляет собой двухпалубную конструкцию (рис. 2), где нижняя палуба 5 — несущая, а роль верхней выполняет печатная плата 3. Нижняя палуба укреплена продольными рёбрами жёсткости 2. Привод мобильного робота — дифференциальный, на два колеса. Четырёхточечное шасси формируется колёсами и шаровыми опорами 1. К нижней палубе закреплён тяговый редуктор 4 и блок аккумуляторов (на рис. условно не показан).
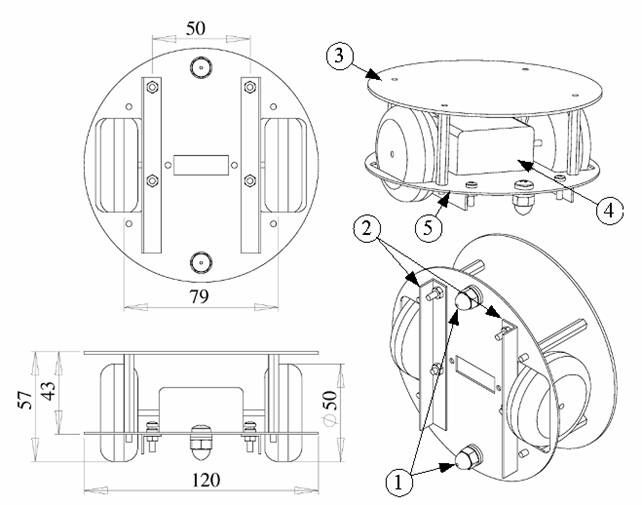
Рис. 2. Конструкция мобильного робота.
Описание принципиальной схемы
Аппаратная часть мобильного робота состоит из следующих блоков:
1) вычислительного блока и блока питания (STR7 MCU Module);
2) блока зарядки бортовых аккумуляторов (Battery Charger);
3) блока сбора информации от датчиков (Sensors Array);
4) блока двухстороннего радиоканала (Radio);
5) блока работы с периферийными устройствами (Peripheral devices);
6) усилителей мощности класса D для управления коллекторными двигателями (Motor Amp Class D).
Принципиальная электрическая схема соединения блоков и разъёмов внешних сигналов представлена на рис. 3. Блок усилителя мощности класса D реализован в схеме дважды для управления двумя коллекторными двигателями постоянного тока.
На рис. 4 приведена принципиальная электрическая схема вычислительного блока. Для наглядности функциональные узлы блока выделены цветными рамками. Основой вычислительного блока является микроконтроллер DD1 STR751FR0T6 [2] с ядром ARM7TDMI-S производительностью 54 DMIPS при тактовой частоте 60 МГц.
Разъём XP7 используется для подключения JTAG-отладчика в режиме отладки, а линии TDI/TDO/TMS/TCK используются для установки номера робота в нормальном режиме работы при помощи переключателя SA2. Резисторы R1, R2, R12 — согласующие, для подключения мобильного робота как устройства USB Full Speed к компьютеру для конфигурации и обновления микропрограмм. Резисторы R13 и R14 образуют делитель напряжения, средняя точка которого подключена ко входу АЦП микроконтроллера, что позволяет контролировать напряжение бортового аккумулятора. Тестовые точки TP1 – TP4 предназначены для осциллографического контроля сигналов MISO, MOSI, SCK интерфейса SPI и тактового ШИМ сигнала 36 кГц для управления ИК-передатчиками (VD9 – VD12 на рис. 6). К шине SPI подключено 3 ведомых устройства: радиомодуль и 2 сдвиговых регистра, которые используются для увеличения количества доступных дискретных линий вывода. Элементы L2-C12-C13 и L3-C18-C19 образуют Г-образные фильтры по питающему напряжению 3,3В для модулей АЦП и ФАПЧ микроконтроллера.
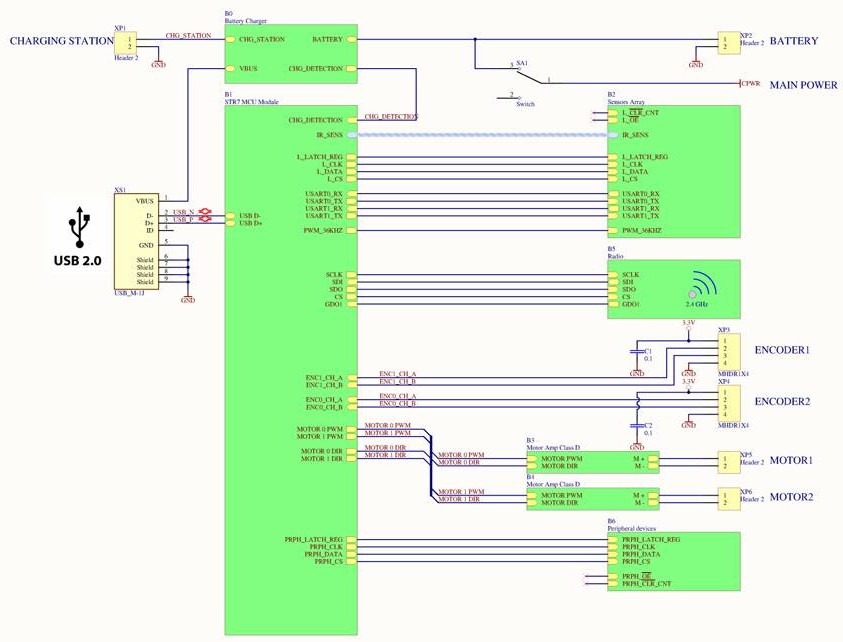
Рис. 3. Принципиальная электрическая схема соединения блоков и разъёмов внешних сигналов.
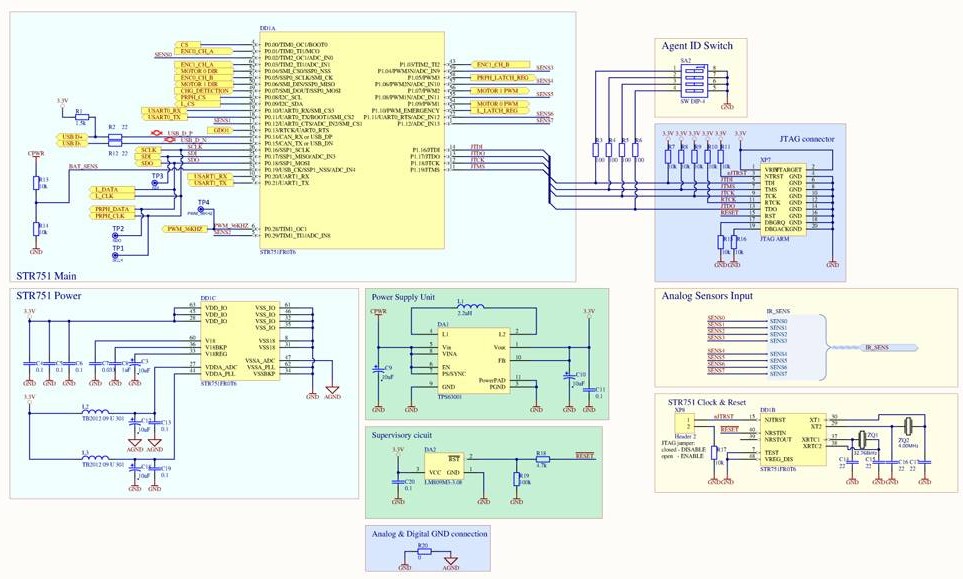
Рис. 4. Принципиальная электрическая
схема вычислительного блока.
Конденсаторы C3 – C8 фильтрующие по линиям питания микроконтроллера напряжением
3,3В и 1,8В. Микросхема DA1 TPS63001 [3] повышающе-понижающего
импульсного преобразователя в стандартном включении позволяет использовать весь
рабочий диапазон напряжений бортового Li-Ion аккумулятора 3,4...4,2В для получения стабилизированного
напряжения 3,3В. Микросхема супервизора DA2 LM809M3-3.08 [4] используется для подачи сигнала ![]() только при стабилизации питающего напряжения выше уровня
3,08В. Резистор R20 с нулевым сопротивлением используется
для схематического объединения общих линий питания аналоговой и цифровой частей
[5]. Тактирование микроконтроллера осуществляется от кварцевых резонаторов ZQ1 32,768 кГц — часы реального времени, ZQ2 4 Мгц — основное тактирование.
только при стабилизации питающего напряжения выше уровня
3,08В. Резистор R20 с нулевым сопротивлением используется
для схематического объединения общих линий питания аналоговой и цифровой частей
[5]. Тактирование микроконтроллера осуществляется от кварцевых резонаторов ZQ1 32,768 кГц — часы реального времени, ZQ2 4 Мгц — основное тактирование.
Разъёмы XP3 и XP4 используются для подключения импульсных инкрементальных энкодеров, которые устанавливаются на оба привода мобильного робота.
На рис. 5 представлена принципиальная электрическая схема блока заряда бортовых аккумуляторов. Напряжение на силовой вход CHG_STATION с разъёма XP1 (рис. 2) подаётся от внешнего зарядного блока — зарядной станции — в диапазоне 5В ± 10%. Микросхема DA3 MAX1555 [6] позволяет использовать в качестве источника питания для заряда также напряжение VBUS интерфейса USB. Сигнал CHG_DETECTION используется для определения состояния заряда бортовых аккумуляторов. В процессе заряда он переходит в состояние низкого логического уровня, в остальных ситуациях он переходит в высокоимпендансное состояние.
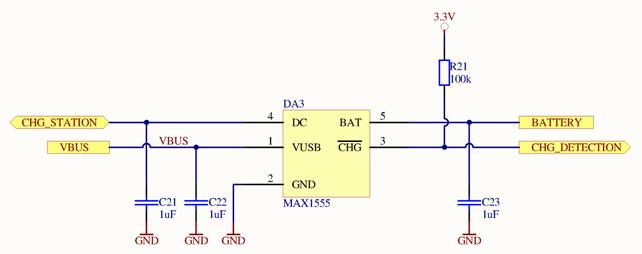
Рис. 5. Принципиальная электрическая схема блока заряда бортовых аккумуляторов.
Бортовой аккумулятор одноэлементный Li-Ion подключается к разъёму XP2 (рис. 3). Применение методов автоматической стыковки мобильного робота к зарядной станции с использованием скользящих контактов даёт возможность использовать исследовательскую систему без присутствия человека-оператора. Это требуется для многих методов итерационного обучения, время которых превышает время автономной работы мобильного робота от бортовых аккумуляторов.
Принципиальная электрическая схема блока сбора информации от датчиков приведена на рис. 6. Сдвиговый регистр DD3 со встроенной защёлкой и вспомогательная логика DD2 (A, B) являются интерфейсной частью ведомого SPI-устройства. Такое решение позволило расширить пространство вывода микроконтроллера на 16 дополнительных линий для управления светодиодами измерителей дальности (DD2, DD3) и периферийными устройствами (DD5, DD6). Конденсатор C32 используется в качестве фильтра и расположен в непосредственной близости с выводами питания микросхемы DD2.
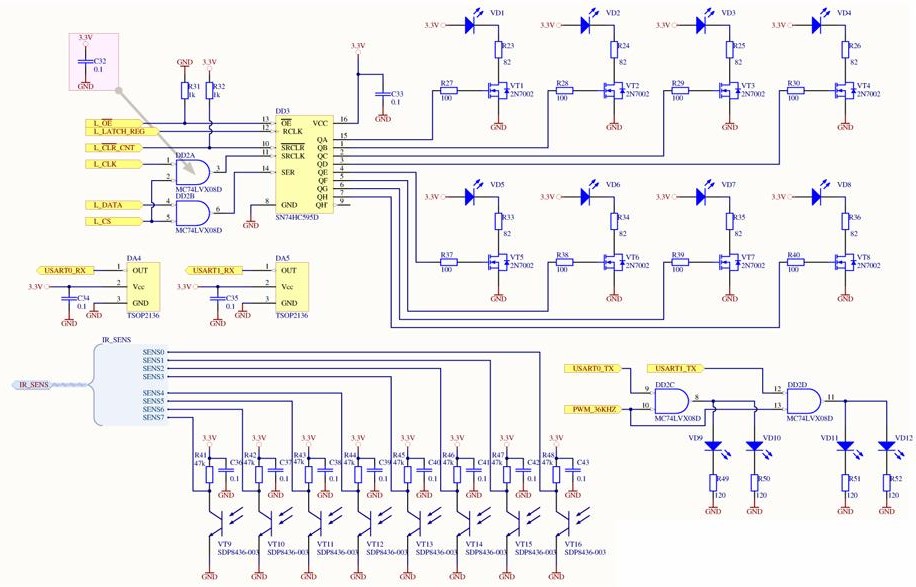
Рис. 6. Принципиальная электрическая
схема блока сбора
информации от датчиков.
Каждый ИК-излучающий диод и фототранзистор (VD1-VT9, VD2-VT10, VD3-VT11, VD4-VT12, VD5-VT13, VD6-VT14, VD7-VT15, VD8-VT16) образуют оптопару с открытым оптическим каналом. Эти оптопары, расположенные по периметру мобильного робота (рис. 10), используется в качестве дальномеров для определения расстояний до препятствий, расположенных на испытательном полигоне. Измерение дальности происходит при помощи двух измерений принимаемого фототранзистором уровня ИК-излучения: первое — без подсветки, второе — с подсветкой. Расстояние до объекта определяется по формуле:
|
|
(1) |
 ,
,где:
![]() – расстояние до препятствия,
– расстояние до препятствия,
![]() – измерение принятой мощности излучения без подсветки и с
подсветкой соответственно,
– измерение принятой мощности излучения без подсветки и с
подсветкой соответственно,
![]() – функция определяемая тарировкой дальномера.
– функция определяемая тарировкой дальномера.
Измерения ![]() фотоприёмника
оптопары сильно зависят от характеристик объекта, отражающего излучение
ИК-излучающего диода. Однако, на испытательном полигоне все препятствия
сконструированы таким образом, чтобы их коэффициенты отражения в диапазоне длин
волн 800...1000нм, излучаемых диодом, лежали в пределах 10% погрешности. Кроме
того, с учетом динамики функционирования мобильного робота существует
возможность использовать оптопары в качестве динамического оптического
дальномера [7].
фотоприёмника
оптопары сильно зависят от характеристик объекта, отражающего излучение
ИК-излучающего диода. Однако, на испытательном полигоне все препятствия
сконструированы таким образом, чтобы их коэффициенты отражения в диапазоне длин
волн 800...1000нм, излучаемых диодом, лежали в пределах 10% погрешности. Кроме
того, с учетом динамики функционирования мобильного робота существует
возможность использовать оптопары в качестве динамического оптического
дальномера [7].
ИК-излучающие диоды VD1-VD8 управляются через полевые транзисторы VT1-VT8 работающие в ключевом режиме. К каждому приёмному каскаду добавлен фильтрующий конденсатор С36-С43. ИК-излучающие диоды VD9-VD12 используются для узко направленной связи в световом ИК-диапазоне с несущей 36 кГц. При этом диоды VD9, VD10 расположены в задней части робота, а VD11, VD12 – в передней. В качестве модулирующего сигнала используется UART. Благодаря наличию двух независимых модулей UART в микроконтроллере возможна независимая передача информации по направлению вперед и назад относительно мобильного робота. Приёмные линии обоих модулей UART микроконтроллера соединены с выходами ИК-приёмников DA4, DA5 TSOP2136 [8], которые принимают на вход ИК-сигналы с несущей частотой 36 кГц, формируя на выходе огибающую с логическими уровнями.
Принципиальная электрическая схема блока двухстороннего радиоканала приведена на рис. 7. Основой радиоканала является аналогово-цифровая интегральная микросхема DD4 CC2550 [9] со встроенным ВЧ-трактом диапазона 2,4 ГГц. Используется стандартное включение микросхемы DD4, антенна типа диполь WA1 выполнена в виде проводников на печатной плате.
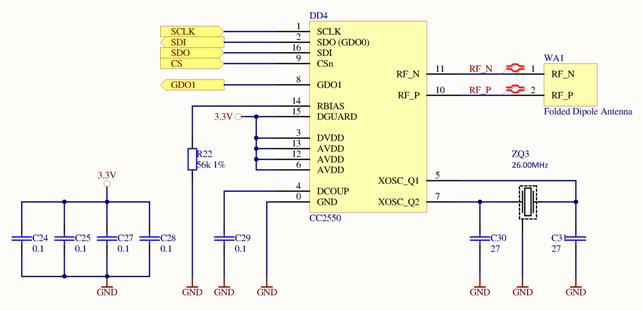
Рис. 7. Принципиальная электрическая схема блока двухстороннего радиоканала.
Принципиальная электрическая схема блока работы с периферийными устройствами показана на рис. 8. Микросхемы DD5 и DD6, как уже упоминалось выше, являются интерфейсной частью SPI. Выход регистра сдвига используется для управления трёхцветным светодиодом HL1, двумя одноцветными светодиодами HL2 и HL3, а также генератором звуковых частот (ЗЧ).

Рис. 8. Принципиальная электрическая
схема блока работы с периферийными устройствами.
Генератор ЗЧ собран на интегральном таймере DA3 ICM7555 [10]. Нагрузкой генератора ЗЧ является излучатель звука BF1, включённый через усилительный каскад на транзисторе VT17.
На рис. 9 показана принципиальная электрическая схема блока усилителя мощности класса D для управления коллекторным двигателем. В мобильном роботе используются два абсолютно идентичных блока для управления двумя ведущими колёсами. Микросхема логики ИЛИ-НЕ DD100 используется для преобразования управляющих сигналов (ШИМ и логический сигнал направления вращения) в сигналы для управления силовым мостом, выполненным на основе сборок MOSFET транзисторов VT100 и VT101. Кроме того, управляющая логика исключает течение сквозных токов через силовой мост. В приводах робота используются электродвигатели постоянного тока с постоянными магнитами Mabuchi FA-130RA-14150, редуктор Tamiya 70097 с передаточным отношением 1:207.

Рис. 9. Принципиальная электрическая схема блока
усилителя мощности класса D для управления
коллекторным двигателем.
Описание конструктивных особенностей
Конструктивно электронная часть выполнена в виде двухсторонней печатной платы в форме круга диаметром 120мм. При расположении элементов и трассировке удалось выбрать компоновку, которая позволила использовать нормы производства по технологии 0,2/0,2мм (минимальная ширина дорожки ПП / минимальный зазор между дорожками ПП).
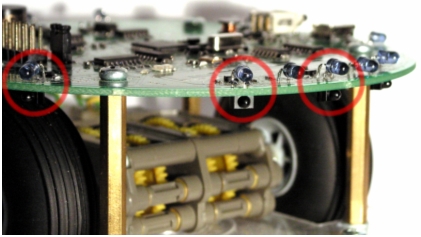
Рис. 10. Передняя часть ПП мобильного робота. Красным цветом выделены
оптопары дальномеров.
На печатной плате компоненты расположены с двух сторон. Использование такого расположения вызвано необходимостью разделения световых пучков у дальномеров, которые обведены красным кругом на рис. 10. В остальном особенности компоновки связаны с необходимыми направлениями измерения дальностей и приёмопередачи направленным ИК-каналом связи.
Вид сверху на печатную плату мобильного робота показан на рис. 11, где введены обозначения:
USB — разъём miniUSB,
ВКЛ — тумблер включения питания,
ДЛН0..7 — оптопары дальномеров,
JTAG — разъём для подключения JTAG-отладчика,
UART0..1_TX — ИК-излучающие диоды, подключенные к каналам TX интерфейсов UART0 и UART1 соответственно.
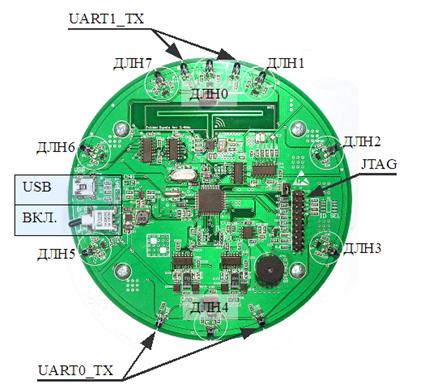
Рис. 11. Вид сверху на ПП мобильного робота.
Направленный ИК-приёмопередающий канал связи ограниченной дальности предназначен для обмена информацией между роботами. На рис. 12 представлены диаграммы направленности а — передатчика, б — приёмника.
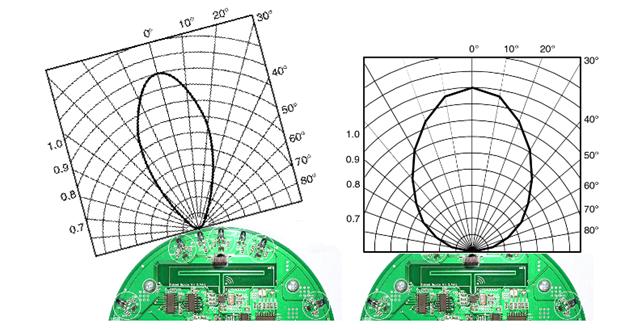
а б
Рис. 12. Диаграммы направленности: а — передатчика, б — приёмника.
В отличие от радиоканала ИК-приёмопередающий канал связи, реализованный при помощи излучателей VD9-VD12 и интегральных фотоприёмников DA4-DA5, позволяет не только вести обмен информацией в пределах видимости, но и благодаря направленности вычислить с определённой точностью относительное угловое положение роботов, участвующих в обмене информацией, а также оценить расстояние между ними. Комбинация же радиоканала и направленного ИК-канала связи позволяет ускорить процесс взаимодействия мобильных роботов, связанный с необходимостью совместного выполнения заданий. Техническое решение в виде указанной комбинации разработанное авторами защищено патентом Российской Федерации на полезную модель (заявка №2011110325).
Заключение
Использование дальномерных модулей на основе оптопар и интегрального фотоприёмника с предобработкой сигнала для приёмной части ИК-приёмопередающего канала связи упростило архитектуру сенсорной и коммуникативной подсистемы мобильного исследовательского робота по сравнению с применением специализированных измерительных модулей, например в [11]. Наличие интерфейса USB с поддержкой программирования микроконтроллера DD1 и подзарядки бортовых аккумуляторов ускоряет процесс разработки встраиваемого ПО для управления роботом. Оснащение широким набором сенсоров даёт возможность построения некорректируемых извне систем управления, структурно аналогичных системам управления мобильных роботов, выполняющих важные прикладные задачи, например: автоматизированного поиска людей при чрезвычайных ситуациях и разминирования, выполняемых группой взаимодействующих мобильных роботов, сбора проб грунтов в геологических целях или мусора — в экологических, а также транспортировки объектов. Объединение двух систем коммуникации позволяет не только использовать мобильный исследовательский робот в качестве узла сети распределённой системы датчиков [12], но и, с учётом свойства направленности, вычислять с определённой точностью относительное угловое положение роботов, участвующих в обмене информацией и оценивать расстояние между ними.
Литература
1. G. Caprari. Autonomous Micro-Robots: Applications and Limitations.— THESE No 2753, EPFL, Lausanne.— 2003.— 134 p.
2. ST Microelectronics. STR751Fxx Datasheet.— http://www.st.com/internet/com/TECHNICAL_RESOURCES/TECHNICAL_LITERATURE/DATASHEET/CD00050740.pdf.— 2009.— 84 p.
3. Texas Instruments. TPS63001 Datasheet.— http://www.ti.com/lit/gpn/tps63001.— 2010.— 24 p.
4. National Semiconductors. LM809 Datasheet.— http://www.national.com/ds/LM/LM809.pdf.— 2002.— 8 p.
5. П. Хоровиц, У. Хилл. Искусство схемотехники.— М.: Мир.— 1998.— стр. 479.
6. Maxim Semiconductors. MAX1555 Datasheet.— http://pdfserv.maxim-ic.com/en/ds/MAX1551-MAX1555.pdf.— 2003.— 8 p.
7. Александров В.А., Меркурьев И.В. Динамический оптический дальномер, применяемый для навигации мобильного робота.— ЦНИИ "Электроприбор": Гироскопия и навигация, №2.— 2006.— стр. 94.
8. Visay Semiconductors. TSOP2136 Datasheet.— http://www.vishay.com/docs/82135/tsop41xx.pdf.— 2010.— 7 p.
9. Texas Instruments. CC2550 Datasheet.— http://focus.ti.com/lit/ds/symlink/cc2550.pdf.— 2009.— 58 p.
10. Philips Semiconductors. ICM7555 Datasheet.— http://www.nxp.com/documents/data_sheet/ICM7555.pdf.— 1994.— 9 p.
11. Vega L., Hughes D., Buscaron C., Schwartz E., Arroyo A., MILyBots: Design and Development of Swarm-Robots .— Florida Conference on Recent Advances in Robotics, FCRAR 2008.— Melbourne, Florida, May 8-9, 2008.— 8p.
12. Л.С. Восков. Беспроводные сенсорные сети и прикладные проекты.— Журнал "Автоматизация и IT в энергетике", №№2,3, 2009.— 2009.— стр. 44-55.