УДК 621.396
ОБНАРУЖЕНИЕ ПОМЕХ В ЧАСТОТНЫХ ДИАПАЗОНАХ КОСМИЧЕСКИХ НАВИГАЦИОННЫХ СИСТЕМ
В. А. Авдеев, А. С. Кошкаров, Е. В. Коннов
Военно-космическая академия имени А.Ф. Можайского
Статья поступила в редакцию 28 сентября 2015 г., после доработки – 29 октября 2015 г.
Аннотация. В статье представлены исследования возможности обнаружения помех в диапазонах систем спутниковой навигации с помощью дополнительных функциональных блоков в составе навигационной аппаратуры. В качестве помеховых воздействий рассматривались наиболее опасные спектрально-согласованные помехи. В качестве объекта исследования выбрана навигационная аппаратура, построенная по перспективной технологии SDR (software defined radio).
Ключевые слова: SDR, навигационная аппаратура потребителя, КНС, помехоустойчивость, радиомониторинг, радиоэлектронное подавление.
Abstract. The article presents research of the possibility of detection of interference in the range of satellite navigation systems by means of additional functional blocks as part of the GNSS receiver. The most dangerous interference, spectrally-coherent interference (spoofing) are considered as interfering influences. GNSS receiver on promising software defined radio (SDR) technology has been chosen as the object of the research.
Key words: SDR, GNSS, GNSS receiver, anti–interference, noise immunity, radio rejection.
Введение
На современном этапе развития общества спутниковые технологии навигационно-временного и координатного обеспечения стали неотъемлемым и важнейшим элементом мировой информационной инфраструктуры. Поэтому актуальным представляется вопрос об уязвимости таких технологий к помеховым воздействиям.
Целью работы является разработка алгоритма детектирования помех в навигационной аппаратуре на этапе предкорреляционной обработки.
1. Анализ состояния вопроса радиомониторинга частотных диапазонов космических навигационных систем
Навигационная аппаратура потребителей (НАП) является одной из составных частей системы спутниковой навигации, ее конечным элементом, по которому судят об эффективности применения системы спутниковой навигации в целом. Навигационная аппаратура предназначена для определения пространственных координат, вектора скорости, текущего времени и ряда других навигационных параметров, полученных в результате приёма и обработки радиосигналов от навигационных спутников.
Высокий уровень интеграции НАП в системы управления определяет целый ряд требований к ней. Одним из основных требований к навигационной аппаратуре является её высокая помехоустойчивость. Именно подверженность НАП воздействию преднамеренных и непреднамеренных помех делает невозможным её использование в качестве основного средства навигации. В то же время уровень воздействия различного рода помех на НАП может быть разным. Некоторые виды помех делают НАП полностью неработоспособной, другие не позволяют навигационной аппаратуре решать навигационную задачу с заданной точностью, т.е. НАП не выполняет своё целевое предназначение. В настоящее время разработано множество способов борьбы с различными видами помех [1-5], в том числе применяемых в НАП космических навигационных систем (КНС). Однако реализация большинства из них либо невозможна для некоторых образцов НАП (например использование фазированных антенных решёток для малогабаритных носимых образцов), либо приводит к значительному удорожанию аппаратуры. Вместе с тем информация о наличии и типе помехи может быть актуальна для данного пользователя, например, для принятия решения о достоверности полученных измерений. В связи с этим актуальной является задача своевременного детектирования различного рода помех в частотных диапазонах ГНСС в целях определения достоверности местоопределения.
Для решения данной проблемы в работе предлагается реализовать возможность детектирования помех в виде самостоятельной функции НАП.
Основные процедуры управления радиочастотным диапазоном КНС, направленные на обеспечение помехоустойчивой навигации в мировом сообществе и в России, сводятся к планированию, распределению, выделению и назначению радиочастот. Данные технологии достаточно хорошо отработаны (например регламенты ИКАО). Однако собственно специализированный оперативный радиомониторинг частотных диапазонов ГНСС в настоящее время в России отсутствует. Проблемой, препятствующей созданию масштабной территориально распределённой автоматизированной системы радиомониторинга частотных диапазонов ГНСС, является использование контролирующими службами радиоизмерительного оборудования разных производителей, которое не только различается по своим техническим и метрологическим характеристикам, но и имеет различные протоколы управления. Программное обеспечение, поставляемое производителями аппаратуры, как правило, позволяет решать задачи радиомониторинга применительно только к «своему» виду оборудования. Несмотря на эти трудности, работы по созданию такой сети ведутся. Однако её внедрение, ввиду обширности территории нашей страны и больших финансовых затрат, потребуют определённого времени.
Использование носителей НАП в качестве детекторов помех позволяет реализовывать систему именно там, где это действительно требуется в данный момент, и получить разветвленную сеть станций обнаружения помех без использования дополнительных средств радиомониторинга. К тому же в состав системы могут входить отдельные НАП-датчики помех расширенного функционала, использующиеся на стационарных или контрольных геодезических постах. Таким образом, внедрение в НАП функции самодетектирования помех представляется необходимым.
2. Анализ влияния помех на навигационную аппаратуру с учетом спектральной структуры помехи
Действие помех на аппаратуру потребителя проявляется в том, что низкое отношение сигнал/помеха не позволяет выполнить измерения задержки излучаемого с борта НКА радиосигнала с необходимой точностью и декодированное навигационное сообщение отличается от переданного с борта спутника.
Синтезу алгоритма детектирования помех в НАП предшествовали теоретические и практические исследования воздействия различного рода помех на навигационную аппаратуру потребителя с целью выявления наиболее «опасных» помех и степени их влияния на различные тракты приёмного устройства, а также изучение результатов работ других авторов [6-10]. Кроме того, необходимо было установить место блока детектирования помех в структурной и функциональной схеме навигационной аппаратуры.
Классические подходы к анализу влияния помех на приёмное устройство подразумевают анализ отношения сигнал/шум на выходе приёмного устройства [11]. В этом случае исходными данными являются только мощности сигналов, шумов и помех. Тип помехи, а соответственно, и её спектр не учитываются. Это явилось следствием следующих допущений: помехи считаются нормальными случайными процессами и суммарная спектральная плотность мощности помех равномерна.
Проведенный анализ показал, что при прохождении помех через радионавигационный канал НАП необходимо учитывать их спектральный состав, так как в зависимости от типа помехи и её распределения по спектру значительно варьируется степень влияния на элементы радиоприёмного устройства. Для учета спектральных особенностей помех рассмотрим НАП как приемник корреляционного типа, при этом на вход коррелятора поступают отсчёты сигнала, шума и помехи с выхода АЦП. Ключевым фактором, определяющим работоспособность коррелятора, является отношение сигнал/шум [11]. Существует подход [12-14], позволяющий рассмотреть сигнал на выходе коррелятора с учётом спектральных свойств.
Согласно приведённой в [15] методике отношение сигнал/шум на выходе коррелятора при наличии помехи может быть записано в виде:
где: PS/N0 – отношение сигнал/шум при отсутствии помех; PJ/PS – отношение помеха/сигнал; Q – спектральный коэффициент прохождения помехи.
где: ΔFкода – отношение сигнал/шум при
отсутствии помех;
![]() –спектральная плотность
мощности сигнала в полосе частот;
–спектральная плотность
мощности сигнала в полосе частот;
![]() – спектральная плотность
мощности помехи;
– спектральная плотность
мощности помехи; ![]() – передаточная функция.
– передаточная функция.
Из полученного соотношения видно, что коэффициент Q определяет влияние спектральной структуры конкретного вида помехи на приемный тракт НАП. При этом, чем меньше значение коэффициента, тем более опасным является уровень воздействия помехи. Значения спектрального коэффициента прохождения для исследуемых типов помех представлены в таблице 1.
Таблица 1. Значение спектрального коэффициента прохождения для различных типов помех [15].
|
Вид преднамеренных помех |
|||
|
Полигармонические на максимумах спектральных пиков |
Узкополосные |
Согласованные по спектру |
Шумовые с ограниченным спектром |
|
Q=1 |
1≤Q≤2 |
Q=1.5 |
Q=2.22 |
Из приведенных в таблице значений видно, что одной из самых опасных помех является полигармоническая помеха на максимумах спектральных составляющих используемого навигационного сигнала. Именно данные типы помех использовались для дальнейших исследований работы блока детектирования помех на основе проверки закона распределения отсчетов с выхода АЦП во временной области.
3. Алгоритм детектирования помех на основе проверки закона распределения отсчетов с выхода АЦП НАП
Отсчеты сигнала, поступающие с выхода АЦП приёмного устройства НАП, в общем случае при отсутствии помех имеют нормальное распределение. Это обусловлено случайным характером шума и типом используемых сигнальных конструкций. Традиционно для проверки закона распределения отсчетов случайной величины используют различные критерии согласия.
Рассмотрим отсчеты входной смеси сигнала, шума и помехи:
Эти отсчеты представляют собой выборку значений наблюдаемой случайной величины объема N. Процедура проверки гипотез с использованием критериев типа χ2 предусматривает группирование наблюдений. Область определения случайной величины разделяют на k непересекающихся интервалов граничными точками
где: х0 – нижняя граница области определения случайной величины; хk – верхняя граница области определения случайной величины.
В соответствии с заданным делением подсчитывают число ni выборочных значений, попавших в i-й интервал, и вероятности попадания в интервал
соответствующие теоретическому закону с функцией плотности f(х, θ). При проверке простой гипотезы о законе распределения отсчетов с выхода АЦП функция плотности описывается, как было отмечено ранее, нормальным законом распределения. При этом соблюдаются условия
В основе статистик, используемых в критериях согласия χ2, лежит измерение отклонений
К критериям такого рода, в частности, относят критерий χ2 Пирсона и критерии типа χ2 [16].
Статистику критерия согласия χ2 Пирсона Sχ2 вычисляют по формуле
В случае проверки простой гипотезы в пределе при N →∞ эта статистика подчиняется χ2r распределению с r = k -1 степенями свободы, если верна нулевая гипотеза. Плотность χ2r - распределения g(s) описывается выражением
Если верна конкурирующая гипотеза H1 и выборка соответствует распределению с плотностью f1(x, θ1) и параметром θ1, то эта же статистика в пределе подчиняется нецентральному χ2r - распределению с тем же числом степеней свободы r = k - 1 и параметром нецентральности
где: ![]() – вероятность попадания в интервал при справедливой
гипотезе H1.
– вероятность попадания в интервал при справедливой
гипотезе H1.
Плотность нецентрального χ2r - распределения g(s,v) имеет вид

где: В(α, β) = Г(α)Г(β)/Г(α + β) – бета-функция.
При заданном уровне значимости α нулевая гипотеза о согласии не должна быть отвергнута, если

где: ![]() – вычисленное в соответствии с (8) значение статистики.
– вычисленное в соответствии с (8) значение статистики.
Статистика критерия отношения правдоподобия

при верной нулевой гипотезе также
асимптотически распределена как ![]() с r = k -1 степенями
свободы. Если верна конкурирующая гипотеза H1 и
выборка соответствует распределению с плотностью f1(x,
θ1) и параметром θ1, то мерой
близости сравниваемых законов является величина
с r = k -1 степенями
свободы. Если верна конкурирующая гипотеза H1 и
выборка соответствует распределению с плотностью f1(x,
θ1) и параметром θ1, то мерой
близости сравниваемых законов является величина
Таким образом, алгоритм детектирования помех на основе проверки закона распределения отсчетов с выхода АЦП может быть реализован с учетом указанных выше соотношений (3)-(12).
При проверке гипотезы о согласии распределения отсчетов смеси сигнал+шум+помеха с теоретическим нормальным распределением алгоритм работы выглядит следующим образом:
1. Формулируем проверяемую гипотезу, выбирая теоретическое распределение случайной величины F(x, θ), согласие которого с опытным распределением этой величины следует проверить.
2. Из совокупности отсчетов входного сигнала выбираем случайную выборку объема N.
3. В зависимости от объема выборки N в соответствии с рекомендациями [16] выбираем число интервалов k.
4. Выбираем граничные точки интервалов группирования.
Интервалы можно выбирать равной длины, в этом случае необходимо подсчитать число ni и определить значения вероятностей Pi(θ).
Интервалы можно выбирать равновероятными, тогда Pi(θ) = 1/k, но необходимо вычислить значения граничных точек хi, разделяющих интервалы.
Можно разбивать выборку на интервалы в соответствии с асимптотически оптимальным группированием для данного закона распределения. Такое разбиение наиболее предпочтительно, так как повышает способность критерия различать близкие гипотезы.
5. После подсчета ni и Pi(θ) в соответствии с выбранным критерием проверки вычисляем значение статистики S* критерия.
6. В соответствии с![]() - распределением по формуле (12) вычисляем значение P{S > S*}. Если P{S > S*}
> α, где α - задаваемый уровень значимости, то нет
оснований для отклонения проверяемой гипотезы. В противном случае проверяемую
гипотезу H0 – отвергаем:
- распределением по формуле (12) вычисляем значение P{S > S*}. Если P{S > S*}
> α, где α - задаваемый уровень значимости, то нет
оснований для отклонения проверяемой гипотезы. В противном случае проверяемую
гипотезу H0 – отвергаем:
Также возможно вычисленное значение статистики S* сравнить с критическим значением Sr,α , где r = k - 1 - число степеней свободы. Гипотезу о согласии отвергают, если значение статистики попадает в критическую область, т. е. при S* > Sr,α.
Структурная схема блока детектирования помех и его место в схеме типовой навигационной аппаратуры космических навигационных систем представлена на рисунке 1. Реализация предложенного алгоритма и апробация его работы проводилась с использованием программного приёмника сигналов КНС. Отметим, что использование технологии SDR с успехом позволяет реализовать в НАП различных потребителей: как различного рода детекторы помех, так и алгоритмы помехоустойчивого приёма [18,19].

Рис. 1. Структурная схема блока, реализующего алгоритм детектирования помех, и его место в составе НАП
В представленной схеме блоки выполняются в порядке их нумерации.
4. Моделирование работы блока детектирования помех
Для верификации полученных результатов в работе было проведено имитационное моделирование работы синтезированного алгоритма детектирования помех во временной области. Для моделирования использовался программный навигационный приемник [17,18,19]. В интересах исследования он был дополнен блоком детектирования помех и банком записей реальных навигационных сигналов.
Для моделирования работы блока детектирования помех использовался банк записей реальных сигналов, сделанных на промежуточной частоте радиочастотного тракта НАП. Все помехи генерировались на промежуточной частоте 9 МГц, соответствующей промежуточной частоте оцифровки сигналов.
Гармоническая (монохроматическая [13] или синусоидальная, англ. - single tone continuous wave interference CWI, рисунок 2) помеха описывается выражением:
где: ![]() ,
, ![]() ,
, ![]() – амплитуда
гармонического сигнала;
– амплитуда
гармонического сигнала; ![]() - фазовая
функция;
- фазовая
функция; ![]() - начальная фаза, при этом
- начальная фаза, при этом ![]()

Рис. 2. Спектр гармонической помехи, формируемой на промежуточной частоте 9 МГц радионавигационного канала НАП
В качестве узкополосной
помехи (англ. – narrowband interference, рисунок 3) использовался
отфильтрованный белый гауссовский шум в полосе, равной 10% ширины основного
лепестка спектральной плотности мощности полезного сигнала. Модель узкополосной
помехи ![]() можно получить, если
рассмотреть белый гауссовский шум, прошедший через колебательный контур и
описываемый уравнениями вида:
можно получить, если
рассмотреть белый гауссовский шум, прошедший через колебательный контур и
описываемый уравнениями вида:
где:
![]() – формирующий белый шум с
характеристиками.
– формирующий белый шум с
характеристиками.
где: ![]() –
резонансная частота формирующего колебательного контура;
–
резонансная частота формирующего колебательного контура;
![]() – затухание формирующего колебательного
контура;
– затухание формирующего колебательного
контура; ![]() – мощность белого гауссовского
шума, прошедшего через колебательный контур.
– мощность белого гауссовского
шума, прошедшего через колебательный контур.
Дисперсия узкополосного процесса ![]() определяется выражением
определяется выражением ![]() .
.
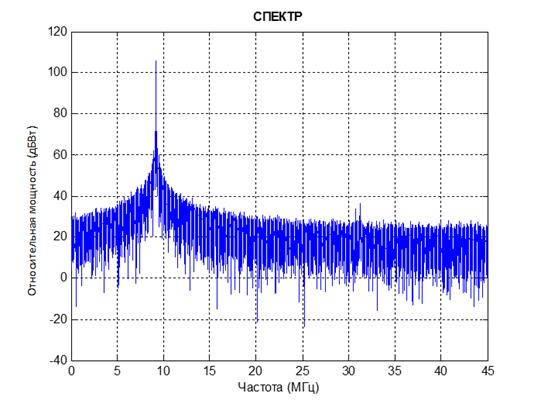
Рис. 3. Спектр узкополосной помехи, формируемой на промежуточной частоте 9 МГц радионавигационного канала НАП
Помеха с линейной частотной модуляцией (англ. – chirp, рисунок 4) использовалась в виде:
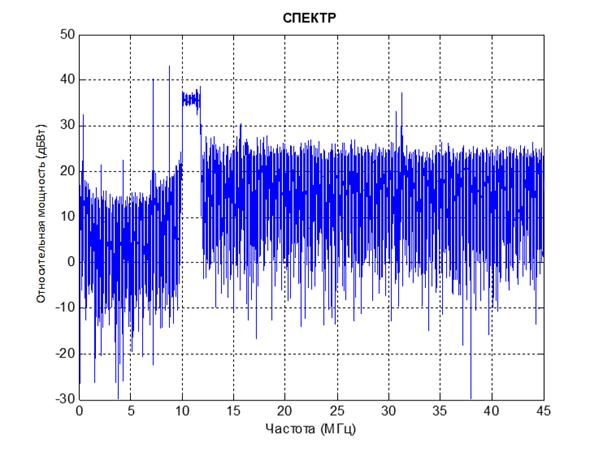
Рис. 4. Спектр помехи с ЛЧМ, формируемой на промежуточной частоте 9 МГц радионавигационного канала НАП
В качестве широкополосной помехи
(англ. – wideband interference,
рисунок 5) использовалась помеха в виде несущей, модулированной по частоте
ограниченным по амплитуде шумом ![]() , при этом граничные полосы частот шума позволяют в пределах полосы
пропускания навигационного приемника считать эту помеху широкополосной.
, при этом граничные полосы частот шума позволяют в пределах полосы
пропускания навигационного приемника считать эту помеху широкополосной.
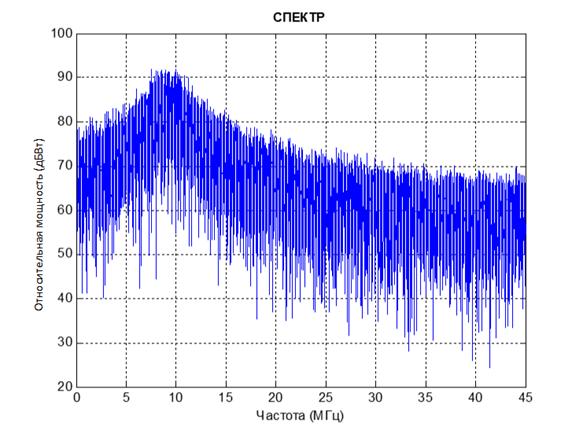
Рис. 5. Спектр широкополосной помехи, формируемой на промежуточной частоте 9 МГц радионавигационного канала НАП
В качестве полигармонической помехи (многочастотной, англ. – multitone continuous wave interference MCWI) рассматривалась сумма нескольких (до 30) гармонических составляющих:

где: ![]() –
частоты гармонических составляющих, которые в общем случае являются
произвольными, для определенности будем считать их упорядоченными по
возрастанию, т.е. удовлетворяющими условию
–
частоты гармонических составляющих, которые в общем случае являются
произвольными, для определенности будем считать их упорядоченными по
возрастанию, т.е. удовлетворяющими условию ![]() ;
;
![]() – амплитуды гармонических составляющих,
– амплитуды гармонических составляющих, ![]() ;
;  –
начальные фазы гармонических составляющих,
–
начальные фазы гармонических составляющих, ![]() .
.
При этом значения начальных фаз ![]() приводятся к диапазону [0, 2π].
Пример спектра формируемого полигармонического сигнала представлен на рисунке 6.
приводятся к диапазону [0, 2π].
Пример спектра формируемого полигармонического сигнала представлен на рисунке 6.
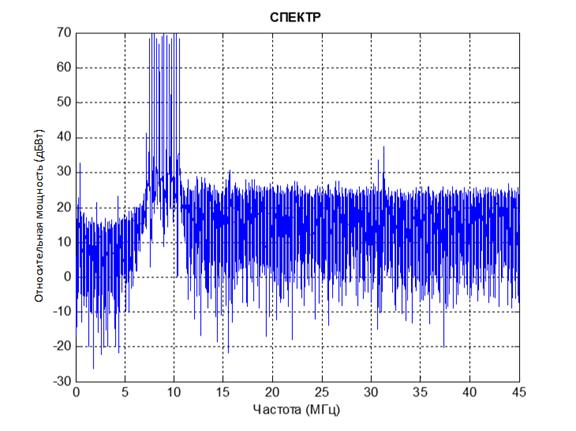
Рис. 6. Спектр полигармонической помехи, формируемой на промежуточной частоте радионавигационного канала НАП
Результаты работы алгоритма детектирования помех во временной области для различных мощностей и рассмотренных видов помех представлены на рисунках 7-9. Обобщенные результаты детектирования представлены в таблице 2.
Первым этапом проверки было определение влияния уровня полигармонической помехи (как наиболее опасной по параметру Q) на закон распределения отчётов на выходе АЦП (рисунок 7).

Рис. 7. Гистограммы распределения отсчетов сигнала с АЦП работы алгоритма детектирования во временной области для полигармонических помех разного уровня: а) 10 дБ; б) 20дБ; в) 25 дБ; г) 30дБ.
На рисунках видно, что увеличение мощности помехового воздействия разрушает нормальный закон распределения отчётов с выхода АЦП на несколько устойчивых значений. Причём, это происходит даже при незначительном уровне помехи.
Далее проверялась возможность использования данного подхода для детектирования наиболее «опасных» видов помех, указанных в таблице 1.
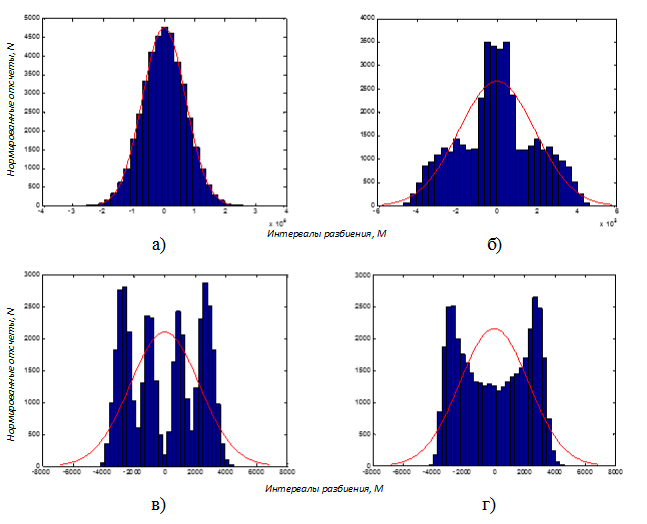
Рис. 8. Гистограммы распределения отсчетов сигнала с АЦП при работе алгоритма детектирования во временной области для различных видов помех одного уровня 30 дБ: а) широкополосная; б) узкополосная; в) гармоническая; г) помеха с ЛЧМ.
Из анализа гистограмм, представленных на рисунке 8, видно, что разрушение нормального закона распределения происходит для всех рассматриваемых видов помех.
Последним пунктом исследований стало определение времени или количества необходимых отчётов принимаемого сигнала для реализации предложенного подхода.
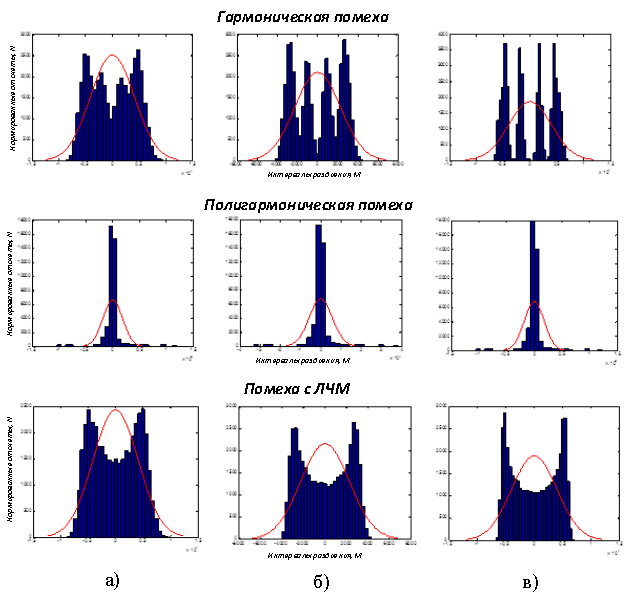
Рис. 9. Гистограммы распределения отсчетов сигнала с АЦП при работе алгоритма детектирования во временной области для различных видов помех одного уровня 30 дБ при различном времени анализа: а) 1 мс; б) 5мс; в) 10 мс.
Анализ гистограмм на рисунке 9 показывает, что детектирование (т.е. наличие факта разрушения нормальности распределения) возможно при анализе выходного сигнала длительностью 1-5 мс. Данный факт показывает, что реализация предложенного алгоритма возможна в масштабе времени близкому к реальному.
|
Таблица 2. Результаты детектирования помех во временной области |
||||||
|
|
Без помех |
Гармоническая помеха |
Полигармоническая помеха |
Помеха с ЛЧМ |
Широкополосная помеха |
Узкополосная помеха |
|
порог χ2 |
23,6848 |
25,4567 |
26,9812 |
23,6848 |
27,5871 |
24,4673 |
|
Значение решающей статистики |
15,8197 |
4008,005 |
2643,6785 |
1045,2975 |
24,6999 |
1654,456 |
|
Решение о наличии помехи |
нет |
есть |
есть |
есть |
нет |
есть |
Обобщение результатов моделирования, приведенных в таблице, показывает, что разработанный алгоритм позволяет детектировать подавляющее большинство наиболее опасных типов помеховых воздействий. При этом уровень превышения рассчитанных значений статистики критерия χ2 над пороговым значением доказывает надёжность предложенного подхода.
По степени отклонения закона распределения от рассчитанного порогового значения статистики видно, что наиболее эффективно детектируются полигармоническая и гармоническая, как наиболее сильно разрушающие закон распределения (превышение в 97 и 160 раз соответственно). Узкополосная и помеха с ЛЧМ достаточно хорошо детектируются с хорошим отклонением от порога с превышением в 68 и 44 раза соответственно. Для широкополосной помехи разница между пороговым и вычисленным значением составила 1,1 раза при этом формально решение о наличии помехи не принято. Авторы считают возможным при введении дополнительных операций в блок детектирования, например, метод моментов, детектирование и этого вида помех.
5. Экспериментальная проверка работы блока детектирования помех
Для верификации разработанного и промоделированного алгоритма было проведена его интеграция в структуру ПО макета программного приемника. Макет программного навигационного приемника построен на СБИС К1879ХК1Я, обладающей большими возможностями для выполнения адаптивной цифровой обработки навигационных сигналов за счет использования в ее составе векторных сопроцессоров и блока предварительной обработки. В ходе эксперимента проверялась работа алгоритма детектирования помех с выхода АЦП аналогового тракта.
Экспериментальный
комплекс аппаратуры решает следующие задачи:
– приём, запись и обработку
сигналов всех видимых НКА в частотном диапазоне L1;
– решение задачи обнаружения
сигналов видимых НКА;
– визуализация результатов
обработки сигналов в макете программного навигационного приемника.
В состав
экспериментального комплекса входят следующие элементы:
1.
Контрольная
навигационная аппаратура потребителя ГНСС ГЛОНАСС.
2.
Макет
программного навигационного приемника на базе СБИС К1879ХК1Я.
3.
ПЭВМ,
осуществляющая управление программным приемником, запись регистрируемых
сигналов и визуализацию результатов обработки навигационных сигналов.
4.
Источник
преднамеренных помех в диапазонах спутниковой навигации с возможностью выбора
типа генерируемой помехи.
В качестве генератора помехи в экспериментальном комплексе используется лабораторный генератор Agilent E4421B, настроенный на частоту эфирных сигналов ГЛОНАСС с уровнем выходного сигнала – от 100 мВ до 1 В.
В качестве контрольного навигационного приемника используется НАП «БРИЗ-ПЛ» производства КБ НАВИС.
Универсальная ПЭВМ реализована на базе процессора Intel Pentium 4 с ОС Windows XP.
Порядок проведения эксперимента по проверке работоспособности разработанного алгоритма поясняется рисунком 10.

Рис.10. Порядок проведения эксперимента
Последовательность операций при проведении эксперимента была установлена следующая:
1. К передатчику помех подключается ненаправленная приёмная антенна.
2. Производится обработка навигационных сигналов на макете программного приемника при отсутствии помех. Фиксируются данные об отношении сигнал/шум, а также результаты работы модуля детектора помех во временной и частотной областях.
3. Выбирается режим работы генератора помехи. Включается передатчик помех и для каждого вида помехи повторяются действия предыдущего пункта.
4. Полученные результаты анализируются и делаются выводы.
Рисунки 11-12 иллюстрируют работу блока детектора помех при проведении эксперимента.
а) б)
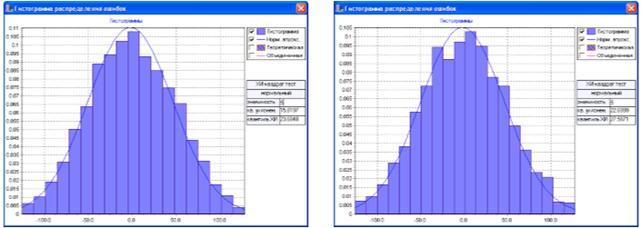
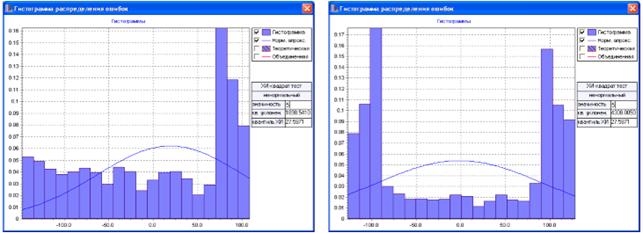
Рис. 11. Результаты работы программного модуля детектора помех макета при их отсутствии а),б) гистограммы распределения квадратурных составляющих эфирного навигационного сигнала с выхода АЦП.
Приведенные на рисунке 11 гистограммы показывают, что при отсутствии помех плотность распределения вероятностей отсчетов с выхода АЦП для каждого квадратурного канала эфирного навигационного сигнала соответствует нормальному закону распределения.
а) б)
Рис. 12. Результаты работы программного модуля детектора помех макета при воздействии гармонической помехи на несущей частоте сигнала а). б) гистограммы распределения квадратурных составляющих сигнала с выхода АЦП.
Анализ результатов, проиллюстрированных выше показал, что при воздействии гармонической помехи плотность вероятностей распределения отсчётов с выходов АЦП имеет ненормальный закон распределения. При этом сигналы квадратурных составляющих имеют сильные искажения. В ходе эксперимента помех модуль детектора помех правильно обнаружил наличие помехи в составе входной смеси при различных уровнях помехи в составе эфирного навигационного сигнала.
Выводы
Проведенное исследование показало, что время, затрачиваемое на детектирование помех на основе анализа плотности вероятности распределения отсчетов с выхода АЦП, составляет 1…5 мс, что дает возможность технической реализуемости разработанного алгоритма детектирования помех ГНСС в реальном масштабе времени в виде специализированной микросхемы (или программного модуля для программного приемника) в составе специализированной НАП.
Предварительная реализация разработанного алгоритма блоком в составе программного обеспечения предкорреляционной обработки макета программного приемника показала состоятельность идеи.
Введение такого блока позволит использовать НАП в качестве детектора помех, а использование распределенной сети НАП-детекторов (например на базе систем мониторинга транспортных компаний или системы ЭРА-ГЛОНАСС) позволит реализовать систему радиомониторинга частотных диапазонов ГНСС в масштабе страны.
Литература
1. Казаков, А.Е. Пути повышения помехозащищенности навигационной аппаратуры потребителей спутниковых навигационных систем / А.Е. Казаков А.А. Водяных // Системы обработки информации. - 2007. - №1(59). - С. 48-51.
2. Защита от помех контрольно-корректирующих станций спутниковых радионавигационных систем / Г.Л. Баранов [и др.]// Системы управления, навигации и связи. – 2007. - №4. – С.7-109.
3. Горшков, С.А. Обзор методов повышения помехоустойчивости аппаратуры пользователей системы NAVSTAR / С.А. Горшков, В.А. Кондратенюк // Доклады БГУИР. – 2005. - № 2. – С.20-22.
4. Немов, А.В. Защита от радиопомех авиационной аппаратуры ГНСС гражданского назначения / А.В. Немов// Известия СПбГЭТУ «ЛЭТИ». – 2010. – № 6. – С. 3-9.
5. Кошкаров, А.С. Пути повышения помехоустойчивости навигационной аппаратуры потребителей ГНСС / Труды 66-й научно-технической конференции, посвященной Дню радио (апрель 2011 г.) // СПб.: Издательство СПбГЭТУ «ЛЭТИ», 2011. - С.34-35.
6. Desing of narrowband interference canceller in GPS receiver using FFT technique/ Wei-Luing Mao, eds.// Far East Journal of Electronics and Communications. – 2008.- vol.2 №3. –P.195-213.
7. Novel SREKF-based recurrent neural predictor for narrowband and FM interference rejection in GPS / Wei-Luing Mao // International Journal of Electronics and Communications. – 2008.- №62. –P.216-222.
8. Sklar Jay R. Interference Mitigation Approaches for the GPS // Lincoln Laboratory Journal. – 2003. – vol. 14. – p. 167-180.
9. Дятлов, А.П. Радиоэлектронная борьба со спутниковыми радионавигационными системами / А.П. Дятлов, П.А. Дятлов, Б.Х. Кульбикаян. – М.: Радио и связь, 2004. – 226 с. – ISBN 5-256-01750-0.
10. А.А. Кащеев, В.И. Кошелев «Оценка эффективности подавления сигналов спутниковых радионавигационных систем преднамеренными помехами». // Журнал радиоэлектроники [электронный журнал]. 2012. №7. URL: http://jre.cplire.ru/jre/jul12/7/text.html
11. Варакин, Л.Е. Системы связи с шумоподобными сигналами / Л.Е. Варакин – М.: Радио и связь, 1985. – 384 с.
12. Betz, J. W. Effect of narrowband interference on GPS code tracking accuracy // in Proc. of ION National Technical Meeting, Anaheim, CA, Jan. 2000, pp. 16 – 27.
13. Betz, J. W. Effect of partial-band interference on receiver estimation of C/N0: Theory// in Proc. of ION National Technical Meeting, Long Beach, CA, Jan. 2001, pp. 817 – 828.
14. Spectral separation coefficients for digital GNSS receivers/ Daniele Borio, Letizia Lo Presti, Paolo Mulassano // 14th European Signal Processing Conference (EUSIPCO 2006), Florence, Italy, September 4-8, 2006.
15. Understanding GPS: Principles and Applications. E.D. Kaplan, ed., 2nd ed. Artech House, Boston – 2006. – 703 p.- ISBN 1-58053-894-0
16. Вентцель, Е.С. Теория вероятностей: учебник. / Е.С. Вентцель. – 7-е изд. – М.: Высшая Школа. – 2001. – 575 с.
17. A Software-Definded GPS and Galileo receiver. A Single-Frequency Approach / K.Borre, Dennis M.Akos, N. Bertelsen, P.Rinder, Soren Jensen // Birkhauser Boston, 2007. – 190 p. – ISBN 978-0-8176-4390-4.
18. Бахолдин В.С., Гаврилов Д.А., Герасименко И.С. и д.р. Программный приемник сигналов спутниковых навигационных систем на базе СБИС К1879КХ1Я. / Труды Института прикладной астрономии РАН, № 27. СПб: Наука 2012 г. С.:230-235.
19. Авдеев В.А., Бахолдин В.С., Гаврилов Д.А. и д.р. Программный прием и обработка сигналов навигационной системы «COMPASS». / Известия высших учебных заведений. Приборостроение, Т. 57, № 3. СПб. СПбГУ ИТМО, 2014 г. С.:40-43.