6. Экспериментальные исследования метода
Цель экспериментальных исследований заключалась в проверке данных теоретического анализа. Для этого было разработано необходимое экспериментальное оборудование. Ниже приводятся описание оборудования, методика проведения экспериментов и полученные результаты исследований, а также рассмотрены принципы построения автоматизированных систем распознавания объектов со сложной формой поверхности на базе пространственного кодирования информации.
6.1. Описание экспериментального оборудования и методики проведения экспериментов
Экспериментальные исследования возможностей метода пространственного кодирования информации для задач распознавания объектов со сложной формой поверхности проводились на двух установках: установке для получения кодированных изображений распознаваемых объектов и установке для оптической обработки информации.
Структурная схема установки для синтеза кодированных изображений объектов приведена на рис. 10. Принцип работы установки состоит в следующем. Луч лазера проходит через коллиматор, в задачу которого входит формирование плоской волны света необходимых размеров. Плоская волна света поступает на кодирующую структуру, в качестве которой использовалась линейчатая или квадратичная решетка с периодом 0,25 мм, выполненная из проволоки диаметром 0,1 мм. Прошедший через кодирующую решетку свет падает на оптическую систему, формирующую в своей задней фокальной плоскости изображение кодирующей решетки. Здесь же находится контролируемое изделие. Результат взаимодействия структурного освещения с поверхностью контролируемого изделия регистрируется фотоаппаратом типа "Зенит" на фотопленке типа "Микрат-600". После фотохимической обработки пленка поступала на вход системы обработки информации [10]. Особенность установки являлся входной узел, который представлял собой лентопротяжный механизм.
6.2. Результаты экспериментов
В первой серии экспериментов исследовалась возможность метода пространственного кодирования информации для решения задач автоматической сортировки различных деталей, подаваемых по конвейеру при их сборке. Решение этой технологической задачи имеет важное практическое значение при использовании промышленных роботов на базе систем технического зрения [20].
В качестве объектов исследования были взяты изделия, выполненные из металла в виде шара, цилиндра и конуса, имеющие один и тот же размер диаметра. Изображения этих изделий без структурного освещения показаны на рис. 11, а (1 - цилиндр со стороны торца, 2 - конус со стороны вершины, 3 - шар). Голографический фильтр был изготовлен на изображение конуса и представлен на рис. 11, б. Корреляционный отклик в выходной плоскости системы обработки информации, показанный на рис. 11, в, представляет собой три одинаковых по яркости световых пятна, т. е. изделия идентифицируются как объекты одного класса.
Применение пространственного кодирования информации для тех же изделий проиллюстрировано рис. 12, а. Голографический фильтр на изображение конуса со стороны вершины при освещении через прямоугольную решетку представлен на рис. 12, б, а корреляционные отклики - на рис. 12, в. Видно, что обнаружение конуса среди группы других объектов (шара и цилиндра) здесь происходит надежно при соотношении сигнал/шум более 30 дб.
Таким образом, применение пространственного кодирования существенно повышает информативность изображений распознаваемых объектов и тем самым позволяет надежно решить задачу сортировки объектов.
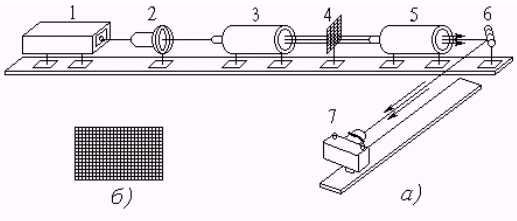
Рис. 10. Структурная схема экспериментальной установки для пространственного кодирования информации: 1 - лазер; 2 - микрообъектив; 3 - коллимирующая линза; 4 - кодирующая решетка; 5 - оптическая система; 6 - объект; 7 - фотоаппарат.
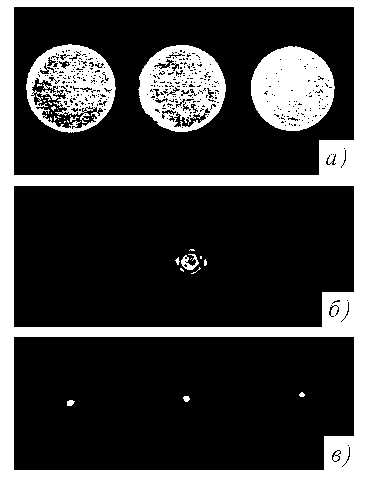
Рис. 11. Изображения группы объектов, фильтра и корреляционных откликов:
а - изображения объектов (1 - цилиндр, 2 -
конус, 3 - шар),
б - изображение фильтра,
в - корреляционные отклики.
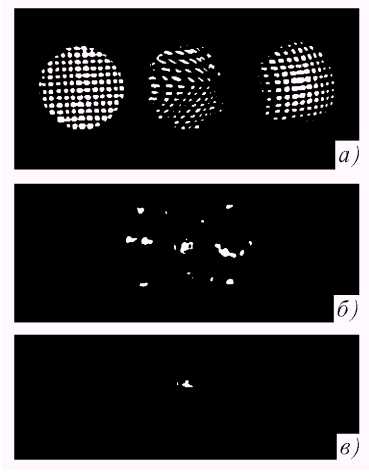
Рис. 12. Кодированные изображения группы объектов, изображение фильтра и корреляционные отклики:
а - изображения объектов,
б - фильтр на изображение конуса,
в - корреляционные отклики.
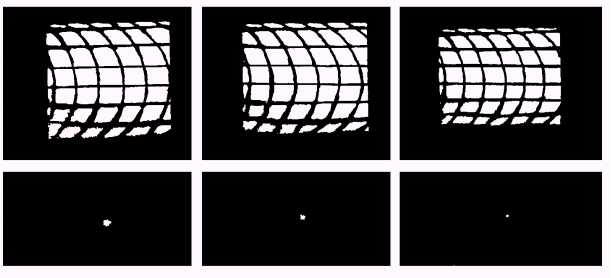
Рис. 13. Изображения группы цилиндров при кодированном освещении и корреляционные отклики на них.
Вторая серия экспериментов проводилась с целью установления метрологических возможностей метода пространственного кодирования информации с корреляционной обработкой выходного сигнала. Здесь в качестве объектов исследования использовался набор отличающихся по размерам металлических цилиндров. Структурное освещение формировалось с помощью кодирующей решетки с квадратной формой ячейки, параметры которой соответствовали данным раздела 4.
Кодированные изображения группы объектов и корреляционные отклики на них представлены на рис. 13, а данные результатов экспериментальных исследований - в таблице 1.
Таблица 1.
Результаты экспериментальных исследований метрологических возможностей пространственного кодирования информации.
|
m<1 |
m>1 |
A |
|||
|
m |
|
m |
|
||
| 1. 2. 3. 4. 5. |
0,9 0,8 0,7 0,6 0,5 |
0,334 0,198 0,120 0,068 0,025 |
1,1 1,2 1,3 1,4 1,5 |
0,472 0,328 0,248 0,186 0,164 |
0,1 |
| 6. 7. 8. 9. 10. |
0,9 0,8 0,7 0,6 0,5 |
0,512 0,328 0,224 0,152 0,100 |
1,1 1,2 1,3 1,4 1,5 |
0,672 0,504 0,432 0,380 0,360 |
0,2 |
|
11. |
0,9 0,8 0,7 0,6 0,5 |
0,598 0,400 0,290 0,208 0,145 |
1,1 1,2 1,3 1,4 1,5 |
0,760 0,627 0,552 0,512 0,472 |
0,3 |
Для исследования чувствительности систем распознавания на базе пространственного кодирования информации с учетом данных теоретического анализа был изготовлен набор объектов цилиндрической формы со следующими размерами диаметра: 200 мм; 80 мм; 40 мм; 10 мм; 3,33 мм и 2,0 мм.
Результаты экспериментальных исследований чувствительности систем распознавания представлены в таблице 2.
Таблица 2.
Результаты экспериментальных исследований чувствительности систем распознавания.
|
№ |
А |
DR/R |
|
|
1. |
1×10 |
3,6×10 |
|
|
2. |
5×10 |
1,7×10 |
|
|
3. |
1×10 |
3,6×10 |
0,95 |
|
4. |
2×10 |
7,0×10 |
|
|
5. |
6×10 |
2,2×10 |
|
|
6. |
1×10 |
3,6×10 |
|
|
7. |
1×10 |
6,0×10 |
|
|
8. |
5×10 |
3,2×10 |
|
|
9. |
1×10 |
6,0×10 |
0,93 |
|
10. |
2×10 |
1,2×10 |
|
|
11. |
6×10 |
3,9×10 |
|
|
12. |
1×10 |
6,0×10 |
|
|
13. |
1×10 |
0,9×10 |
|
|
14. |
5×10 |
4,6×10 |
|
|
15. |
1×10 |
0,9×10 |
0,9 |
|
16. |
2×10 |
1,9×10 |
|
|
17. |
6×10 |
5,4×10 |
|
|
18. |
1×10 |
0,9×10 |
|
Для оценки влияния точности позиционирования объекта на входе системы распознавания на корреляционный отклик использовались объекты в виде прямоугольного отверстия с соотношением сторон l/h= 1; 2; 4; 6; 8; 10. Угловой поворот объекта в поперечной плоскости осуществлялся с помощью специально разработанного для этой цели приспособления.
Полученные данные сведены в таблицу 3.
Таблица 3.
Результаты экспериментальных исследований влияния точности позиционирования объекта на корреляционный отклик.
|
¹ |
l/h |
D |
g |
|
1. |
1 |
0,09×10 |
|
|
2. |
2 |
0,13×10 |
|
|
3. |
4 |
0,24×10 |
5¢ |
|
4. |
6 |
0,37×10 |
|
|
5. |
8 |
0,51×10 |
|
|
6. |
10 |
0,65×10 |
|
|
7. |
1 |
0,24×10 |
|
|
8. |
2 |
0,31×10 |
|
|
9. |
4 |
0,55×10 |
10¢ |
|
10. |
6 |
0,83×10 |
|
|
11. |
8 |
1,11×10 |
|
|
12. |
10 |
1,40×10 |
|
|
13. |
1 |
0,38×10 |
|
|
14. |
2 |
0,49×10 |
|
|
15. |
4 |
0,85×10 |
15¢ |
|
16. |
6 |
1,28×10 |
|
|
17. |
8 |
1,68×10 |
|
|
18. |
10 |
2,09×10 |
|
Графическое отображение результатов поведения максимума корреляционного отклика от изменения радиуса объекта, параметров схемы и угловой ориентации объекта на входе системы распознавания показаны на рис. 3, 4 и 6 соответственно. Сравнение полученных результатов с данными теоретического анализа свидетельствует об их достаточно хорошем согласовании.
Кроме того, исследовалась возможность метода пространственного кодирования информации для выявления дефектов на поверхности объекта [21, 22]. В результате получено аналитическое выражение для корреляционного отклика системы распознавания от величины площади дефекта
 ,
(33)
,
(33)
где ![]() — площадь дефекта,
— площадь дефекта, ![]() — площадь изображения объекта.
— площадь изображения объекта.
Поведение зависимости корреляционного отклика от величины дефекта показано на рис. 14. Видно, что относительная точность при существующих возможностях фотоприемников не превышает 1%. Поэтому для повышения абсолютной точности распознавания предложено проводить поэлементный анализ поверхности объекта, для чего на входе системы вводится узел дискретизации изображения объекта, а на выходе — матрица фотоприемников [12]. При этом на фильтре должны быть голографическим способом записаны Фурье-спектры всех участков, на которые разбивается изображение объекта.
Эффективность дискретизации объекта с дефектом (вмятиной) на его поверхности проиллюстрирована рис. 15. На рис. 15, в, и 15, г, показаны Фурье-спектры различных по размерам участков поверхности объекта с дефектом. По ним трудно заметить разницу между Фурье-спектрами. Совсем иная картина наблюдается при сравнении рис. 15, б, и 15, г. Здесь видна довольно четкая разница между спектрами.
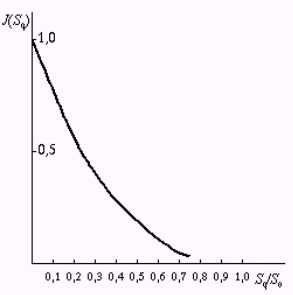
Рис. 14. Зависимость корреляционного отклика от величины площади дефекта.
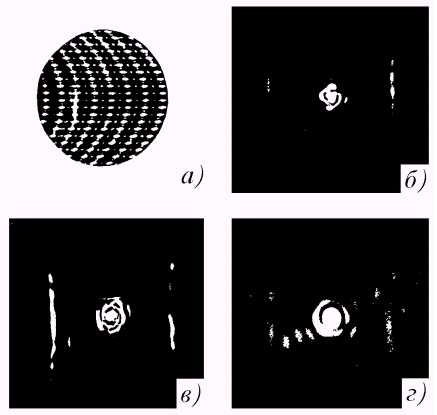
Рис. 15. Изображение детали с дефектом и Фурье-спектры на него:
а — изображение детали,
б — Фурье-спектр на изображение детали,
в — Фурье-спектр на 1/2 изображения детали,
г — Фурье-спектр на 1/8 изображения детали.