3. Исследование метрологических возможностей метода
Как было отмечено в разделе 1, структура изображения на транспаранте определяется тремя факторами: кодирующей решеткой, геометрией изделия контроля и углом визирования. При контроле партии одинаковых изделий параметры кодирующей решетки и угол визирования постоянны и, следовательно, структура изображения всецело зависит от геометрии изделия.
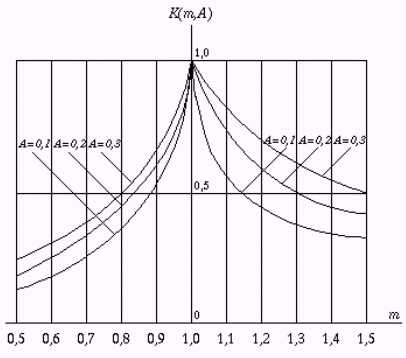
Анализ существующих на практике объектов позволил установить [12-15], что изображения таких поверхностей как цилиндрическая, сферическая, коническая и всевозможные их комбинации, при освещении через кодирующую решетку в виде системы чередующихся прозрачных и непрозрачных линий представляет собой набор полос типа кривых второго порядка.
Принимая во внимание изложенное, а также то обстоятельство, что большая часть встречающихся объектов состоит из поверхностей перечисленных типов, ограничимся рассмотрением случая распознавания объектов с цилиндрической поверхностью. Вычисления будем проводить лишь для максимума корреляционного отклика, что соответствует физическим условиям его оценки.
Пусть объект
расположен так, что направление освещения перпендикулярно его поверхности и
образующая поверхности параллельна горизонтальной плоскости. Если радиус
цилиндрической поверхности обозначить через R, а ширину линии в
кодирующей решетке через ![]() , то пропускание транспаранта для одной линии на
изображении поверхности можно записать так:
, то пропускание транспаранта для одной линии на
изображении поверхности можно записать так:

(15)
Такая запись пропускания предполагает стопроцентную модуляцию регистрирующей среды транспаранта, что обеспечивается надлежащим выбором времени экспонирования и режима ее обработки.
После подстановки (15) в (9), интегрирования и нормирования получим следующее выражение для определения максимума корреляционного отклика