7. Принципы построения систем распознавания на базе пространственного кодирования информации
Реализация процесса распознавания объектов со сложной формой поверхности при использовании пространственного кодирования информации сопряжена с выполнением следующих операций:
-
получением пространственно кодированных изображений распознаваемых объектов;
-
сравнением текущих изображений объектов с изображением эталонного объекта;
-
формированием команд управления для сортировки распознаваемых объектов.
В соответствии с этим система распознавания трехмерных объектов на базе пространственного кодирования информации должна содержать следующие основные узлы: датчик структурного освещения, устройство формирования и переноса изображения объекта на вход блока обработки информации, блок обработки информации, блок принятия решений и формирования команд управления и механизмы автоматической подачи и сортировки объектов, которые функционально должны быть увязаны схемой, показанной на рис. 16.
Рассмотрим особенности создания и выбора узлов и топологии схем построения систем распознавания на базе пространственного кодирования информации. Что касается создания механизмов позиционирования, подачи и удаления объектов со входа системы распознавания, то эта техническая задача достаточно освещена в работах [23-25].
При рассмотрении особенностей построения систем распознавания будем обращать внимание лишь на те элементы схемы, которые оказывают существенное влияние на метрологические возможности систем распознавания.
7.1. Датчик структурного освещения
Датчик структурного освещения должен включать в себя источник света, расширитель пучка света, кодирующую решетку и оптическую систему (рис. 17).
Для структурного освещения может использоваться как когерентный, так и некогерентный свет. При этом необходимо учитывать следующее:
-
когерентное освещение дает систему интерференционных полос в целом секторе пространства. В то время как некогерентное освещение приводит к ограничениям из-за глубины фокусировки оптических систем;
-
когерентное освещение является причиной зернистости, которое увеличивает шумы операций обработки информации.
Формирование структурно освещения может быть осуществлено либо с помощью двумерных решеток как в когерентном, так и в некогерентном свете. С практической точки зрения наибольшего внимания заслуживают линейчатые кодирующие структуры, выполненные из непрозрачных нитей. Величина периода структуры определяется из соотношения
где d - период структуры, l - наименьший линейный
размер дефекта. Для задач контроля изделий точного приборостроения весьма
привлекательным является применение голограмм кодирующих структур.
Использование голограммы кодирующей структуры дает возможность проводить
регулировку размера периода ячейки структуры. Достигается это применением
различных длин волн при записи и восстановлении голограммы кодирующей
структуры. При этом масштаб изменения размера периода структуры будет
определяться отношением длин волн ![]() , где
, где ![]() - длина волны света при записи голограммы,
- длина волны света при записи голограммы, ![]() - длина волны света при восстановлении
информации из голограммы.
- длина волны света при восстановлении
информации из голограммы.
Последним элементов датчика структурного освещения
является оптическая система для формирования изображения кодирующей структуры.
При ее выборе следует обращать внимание на разрешающую способность и глубину
резко передаваемого пространства. Что касается
разрешающей способности, то этот вопрос уже рассматривался в
[16] и в
разделе 3 настоящей работы. Глубина резко передаваемого пространства определяется
разностью расстояний от объектива до задней ![]() и передней
и передней ![]() границ резко передаваемого изображения
детали. Определение расстояний
границ резко передаваемого изображения
детали. Определение расстояний ![]() и
и ![]() осуществляется в соответствии с формулами
[26]
осуществляется в соответствии с формулами
[26]
где c - расстояние от
объектива до плоскости фокусирования; z¢ - допустимый кружок рассеяния, в частности равный
для видикона 0,017 мм; k - значение знаменателя относительного
отверстия объектива; ![]() - фокусное расстояние объектива. Используя
приведенные зависимости, нетрудно подобрать с требуемыми параметрами объектив
для контроля заданной группы деталей.
- фокусное расстояние объектива. Используя
приведенные зависимости, нетрудно подобрать с требуемыми параметрами объектив
для контроля заданной группы деталей.
Из-за конкретности размеров элементов датчика структурного освещения и блока формирования и переноса изображения объекта наблюдается вполне конкретная величина угла визирования b, ниже которой изменить его нельзя. Естественно, что это обстоятельство существенно ограничивает класс распознаваемых объектов. Проведенные в этом направлении исследования [12] позволили разработать датчик структурного освещения, лишенный отмеченного недостатка. Схема датчика приведена на рис. 18. Его особенностью является включение между объективом для формирования изображения кодирующей структуры и контролируемым изделием поворотного полупрозрачного зеркала, которое дает возможность изменять угол визирования вплоть до 0°.
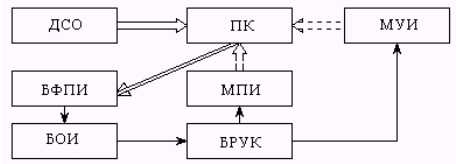
Рис. 16. Обобщенная структурная схема системы распознавания: ДСО — датчик структурного освещения; ВСР - вход системы распознавания; БФПИ - блок формирования и переноса изображения распознаваемого объекта; БОИ - блок обработки информации; БРУК - блок принятия решения и выработки управляющих команд; МПО - механизм подачи объекта на вход системы распознавания; МУО - механизм удаления объекта.
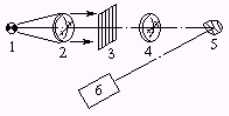
Рис. 17. Схема датчика структурного освещения:
1 - источник света; 2 - коллиматор; 3 - кодирующая решетка; 4 - оптическая система для формирования изображения решетки; 5 - распознаваемый объект; 6 - формирователь изображения распознаваемого объекта.
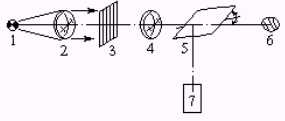
Рис. 18. Схема датчика структурного освещения с регулированием угла визирования: 1 - источник света; 2 - коллиматор; 3 - кодирующая решетка; 4 - оптическая система для формирования изображения решетки; 5 - поворотное полупрозрачное зеркало; 6 - распознаваемый объект; 7 - формирователь изображения распознаваемого объекта.
Предложенное схемное решение датчика структурного освещения позволяет оптимизировать его топологию применительно к особенностям рельефа распознаваемого объекта.
После того, как изображение распознаваемого объекта сформировано, оно поступает в блок обработки информации. Было установлено [15], что заслуживают внимания два варианта построения блока обработки информации: на базе электронной и оптической обработки информации.
7.2. Системы распознавания с электронной обработкой информации
Среди электронных средств обработки сигналов с учетом особенностей пространственного кодирования информации наиболее привлекательным является использование телевизионной техники [27]. Структурная схема одного из вариантов, разработанного нами [13], системы распознавания на базе телевизионной техники показана на рис. 19.
Элементы схемы с 1 по 5 представляют датчик структурного освещения. Все остальные элементы относятся к каналу обработки информации и принятия решения. Он включает в себя объектив 6, видикон 7, блок программы считывания изображения 14, схему выделения строк 8, формирователь видеоимпульсов по строке 9, синхронизатор 11, блок эталонных импульсов 12, схему сравнения 10 и блок выработки управляющих команд 13. Работа канала заключается в следующем.
Изображение детали после структурного освещения, сформированного объективом, поступает на светочувствительную мишень видикона, с которой считывается электронным лучом. Полученные электрические сигналы затем подвергаются обработке. В нашем случае эта задача решается путем сравнения длительности видеоимпульсов по каждой строке анализируемого изображения объекта с длительностью видеоимпульсов изображения эталонного образа. Для большинства задач распознавания осесимметричных объектов будет наблюдаться набор периодических импульсов по каждой строке развертки при считывании изображения распознаваемого объекта. Выработка эталонных видеоимпульсов осуществляется в блоке 12. Схема выделения строк 8 предназначена для снятия информации по группе строк. Дело в том, что вследствие нестабильности источников питания, нелинейности развертки электронного луча видикона и параметров электронных схем происходит нарушение привязки строк между текущей и эталонной информацией. Решение этой задачи значительно упрощается за счет использования усредненной информации по группе строк, для чего в канал обработки информации и были включены и блоки 8 и 14. В результате информация от эталонного и распознаваемого объектов сравнивается по одним и тем же строкам в блоке 10. В функцию синхронизатора 11 входит обеспечение одновременного запуска схем считывания информации по строкам при сравнении распознаваемого и эталонного объектов. Результат сравнения поступает на вход блока выработки управляющих команд 13, сигнал с которого приводит в действие механизм сортировки объектов.
Ясно, что разрешающая способность систем распознавания на базе телевизионной техники определяется разрешающей способностью видикона, которая для лучших образцов находится в пределах 0,02 мм, что вполне удовлетворяет современным техническим требованиям.
Вопрос анализа всей поверхности объекта может быть решен либо путем вращения объекта, либо с помощью многоканальных систем распознавания. И здесь при создании многоканальных систем распознавания трехмерных объектов широкие возможности открывают последние достижения в области волоконной оптики [28-35]. Привлекательность волоконной оптики заключается в том, что ее использование позволяет существенно упростить схемное, алгоритмическое и конструктивное решения при построении систем контроля, а также достигнуть их функциональной гибкости и компактности. Иллюстрацией сказанного служит система распознавания объектов типа тел вращения [12], схема которой показана на рис. 20. Ее особенностью является трехплечий волоконно-оптический разветвитель, который одновременно позволяет снять информацию о всей поверхности объекта и выполняет функции формирования, переноса и суммирования изображения поверхности распознаваемого объекта. Такая конструкция волоконно-оптического разветвителя значительно упрощает алгоритм обработки информации, а тем самым дает возможность упростить электронную часть системы распознавания на базе пространственного кодирования информации.
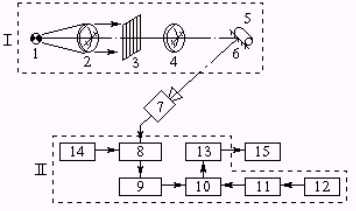
Рис. 19. Структурная схема системы распознавания с электронной обработкой информации: I - датчик структурного освещения (элементы с 1 по 5); 6 - позиция контроля; 7 - телевизионная камера; II - канал электронной обработки информации (8 - схема выделения строк; 9 - формирователь видеоимпульсов; 10 - процессор; 11 - синхронизатор; 12 - блок эталонных видеоимпульсов; 13 - блок выработки управляющих команд; 14 - блок программы считывания изображения распознаваемого объекта); 15 - механизм подачи и удаления объекта.
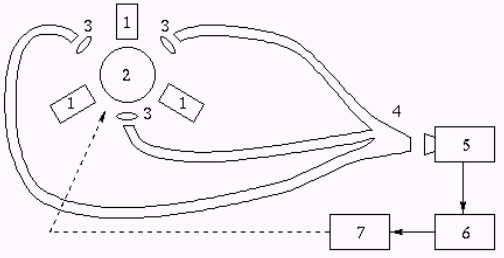
Рис. 20. Структурная схема системы распознавания с использованием волоконной оптики: 1 — датчик структурного освещения; 2 — распознаваемый объект; 3 — оптическая система для формирования изображения распознаваемого объекта; 4 — трехплечий волоконно-оптический разветвитель; 5 — телевизионная камера; 6 — канал электронной обработки информации; 7 — механизм подачи и удаления объекта.
Необходимо также отметить, что применение стандартной развертки здесь вряд ли возможно, так как получаемые длительности импульсов входят в наносекундный диапазон, что, естественно, приводит к серьезным техническим трудностям при создании электронной аппаратуры. Поэтому требуется разработка специализированной телевизионной аппаратуры со значительно меньшими длительностями импульсов строчной развертки. При этом длительность развертки определяется минимальным размером дефекта распознаваемого объекта. Что касается вопросов конкретного создания подобной аппаратуры, то они детально рассмотрены в работе [27].
К достоинствам систем распознавания на базе телевизионной техники следует отнести возможность распознавания объектов практически любых размеров. Однако, при этом разрешение системы распознавания будет ухудшаться по мере увеличения размеров объекта.
Разновидностью систем распознавания с электронной обработкой информации является разработанная нами компактная оптоэлектронная система дефектоскопии поверхности тел вращения с параллельной обработкой сигналов [13], структурная схема которой приведена на рис. 21.
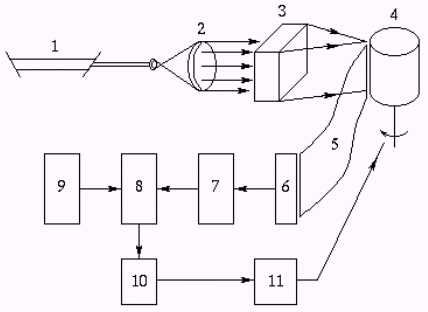
Рис. 21. Структурная схема оптоэлектронной системы дефектоскопии поверхности тел вращения с параллельной обработкой информации: 1 - лазер; 2 - коллиматор; 3 - формирователь освещенности детали; 4 - распознаваемое тело; 5 - пространственный распределитель отраженного света; 6 - матрица фотодиодов; 7 - усилитель; 8 - компаратор; 9 - блок формирования эталонных сигналов; 10 - блок логики; 11 - исполнительный механизм.
Система включает в себя источник света, например лазер, за которым последовательно расположены: коллиматор для создания плоской волны света, формирователь светового потока облучения детали с линейной функцией распределения освещенности, в качестве которого при дефектоскопии поверхности тел цилиндрической формы может служить цилиндрическая линза, и эталонное тело.
Отраженный от поверхности объекта свет поступает на волоконно-оптический пространственный распределитель, представляющий собой жгут световодов, входная плоскость которого выполнена в виде однорядной гребенки световодов, уложенных вплотную друг к другу. Выходные торцы световодов оптически связаны с матрицей фотодиодов, причем каждый световод работает только на один фотодиод. Фотодиоды предназначены для преобразования световой энергии в электрические сигналы. Электрические сигналы, пропорциональные световому отражению от поверхности объекта, пройдя усилитель, поступают на компаратор. Сюда же подаются эталонные сигналы, которые формируются в предназначенном для этого блоке. Выход компаратора через блок логики подключен к исполнительному механизму, в задачу которого входит вращение объекта и его сортировка в зависимости от принятого решения.
Такое построение систем распознавания позволяет достичь компактности конструкции, существенно повысить производительность операции распознавания и получить возможность регулировки допусков на разбраковку объектов путем изменения алгоритма обработки информации.
7.3. Системы распознавания с оптической обработкой информации
Одним из главных требований, предъявляемых к крупносерийному и массовому производству продукции, является высокая производительность. Ясно, что она напрямую зависит от производительности всех операций производственного процесса. В этой связи применительно к оценке качества изготовления изделий со сложной формой поверхности пристального внимания заслуживает вариант построения систем распознавания с оптической обработкой информации. Дело в том, что устройства с голографической обработкой информации позволяют проводить параллельную обработку больших массивов данных со скоростью света. В результате появляется возможность осуществлять одновременно анализ нескольких объектов. Правда, эта возможность достигается при обязательном использовании устройств ввода информации, работающих в режиме реального времени. Другими словами, здесь операции записи стирания и сравнения изображения распознаваемого объекта с эталоном должны выполняться в темпе подачи объектов на вход системы распознавания. Среди разработанных к настоящему времени оперативных устройств ввода двумерной информации для нашего случая практический интерес представляют пространственные модуляторы света на жидких кристаллах [36], на основе электрооптической керамики и особо на базе светоклапанных устройств, выполненных в виде электронно-лучевых трубок [37].
Примером построения систем распознавания с оптической обработкой информации является разработанная когерентнооптическая система бесконтактного контроля формы поверхностей на базе пространственного кодирования информации и оптической согласованной фильтрации [13], структурная схема которой показана на рис. 22. Она включает в себя датчик структурного освещения (элементы схемы с 1 по 5), устройство формирования и переноса изображения объекта на вход канала обработки информации (элементы 8, 9) и канал когерентно-оптической обработки информации (элементы с 10 по 15). Остальные элементы схемы относятся к электронной части системы контроля.
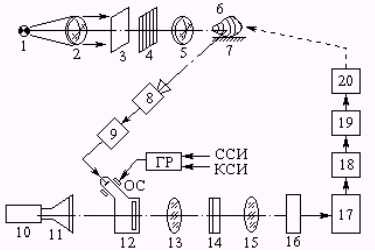
Рис. 22. Структурная схема системы распознавания с оптической обработкой информации: 1 - источник света; 2, 11 - коллиматор; 3 - диффузный рассеиватель; 4 - кодирующая решетка; 5 - оптическая система для формирования изображения кодирующей решетки; 6 - контролируемое изделие; 7 - вход системы; 8 - телевизионная камера; 9 - видеоусилитель; 10 - лазер; 12 - устройство ввода двумерной информации; 13 - линза для выполнения прямого преобразования Фурье; 14 - голографический фильтр; 15 - линза для выполнения обратного преобразования Фурье; 16 - фотоприемник; 17 - усилитель постоянного тока; 18 - пороговая схема; 19 - блок выработки управляющих команд; 20 - электромеханический манипулятор; ОС - отклоняющая система; ГР - генератор развертки; ССИ - строчный синхроимпульс; КСИ - кадровый синхроимпульс.
Сформированное телекамерой 8 изображение объекта переносится на светочувствительную поверхность оперативного носителя информации, в качестве которого использовалась проекционная электронно-лучевая трубка 12 типа скиатрон (6ЛК1Б). Изображение на ней записывается электронным лучом, промодулированным сигналом от передающей камеры модернизированной промышленной телевизионной установки типа ПТУ-29. Распределение электрического потенциала на экране скиатрона соответствует распределению лучистого потока принятого изображения, т. е. имеет всего две градации. Естественно, что такое представление информации существенно снижает требования к динамическому диапазону оперативного носителя информации.
Оперативный носитель информации (в нашем случае экран скиатрона) является узлом ввода информации в когерентно-оптический коррелятор, работа которого рассмотрена в [37].
Измерение интенсивности корреляционного отклика и принятие решения о соответствии распознаваемой поверхности эталонной входит в функцию электронной части системы распознавания. В ней фотоприемник 16, в качестве которого был выбран фотоэлектронный умножитель типа ФЭУ-68, осуществляет преобразование световой энергии в электрический сигнал. Этот сигнал подается на электронное решающее устройство, состоящее из усилителя постоянного тока 17, пороговой схемы 18 и блока выработки управляющих команд 19. Выход решающего устройства подключен к электромеханическому манипулятору сортировки объектов 20.
При разработке решающего устройства были использованы микросхемы типа К1УТ221 и К1ТШ221.
Размер исследуемого объекта определяется оптической системой датчика структурного освещения, быстродействие контроля - скоростью подачи на вход системы распознавания.
Длина волны лазерного излучения находится в диапазоне 0,48-0,7 мкм, потребляемая мощность - 2,5 кВт.
Рассмотренная схема распознавания имеет ряд практически важных особенностей, среди которых следует выделить: простоту алгоритма обработки информации; технологичность изготовления; простоту и надежность эксплуатации; высокую производительность при объективности распознавания; удобство сопряжения со средствами автоматики; оперативность перестройки для исследования новой партии объектов (заменяется фильтрголограмма и механизм ввода информации).